Evaluating and Diagnosing Road Intersection Operation Performance Using Floating Car Data


Abstract
:1. Introduction
2. Methodology
2.1. Data Collection and Cleaning
2.2. The Grid Model
2.2.1. Identifying the Directions of Trajectories
2.2.2. Defining the Influential Regions of Intersections
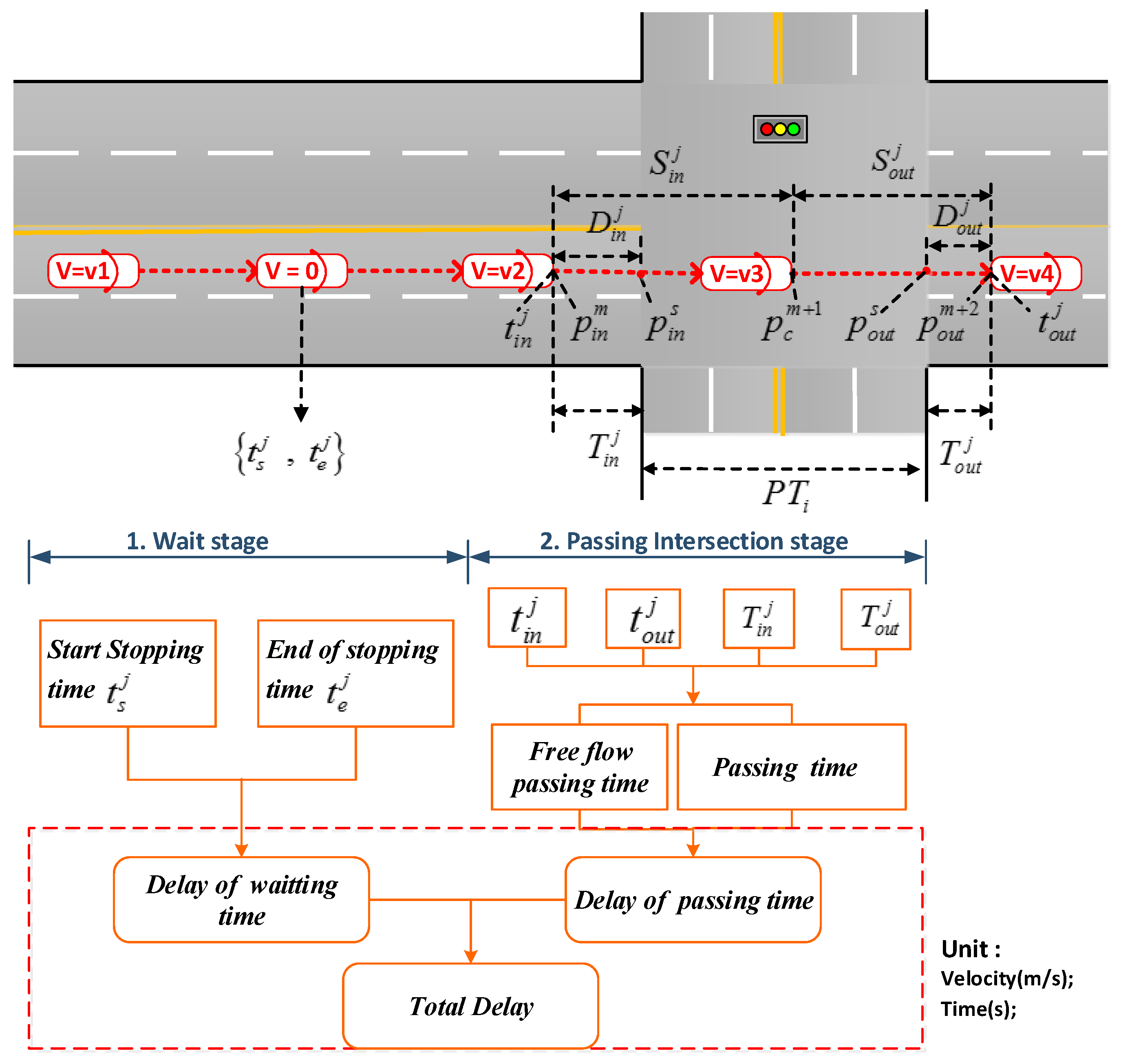
2.2.3. Defining the Intersection Traffic Delay Indexes
2.2.4. Diagnosing the Intersection Traffic Delay
3. The Empirical Case Study in Beijing
3.1. The Intersections’ Total Delay
3.2. The Traffic Operation States for Individual Intersections
3.2.1. The Traffic Delay
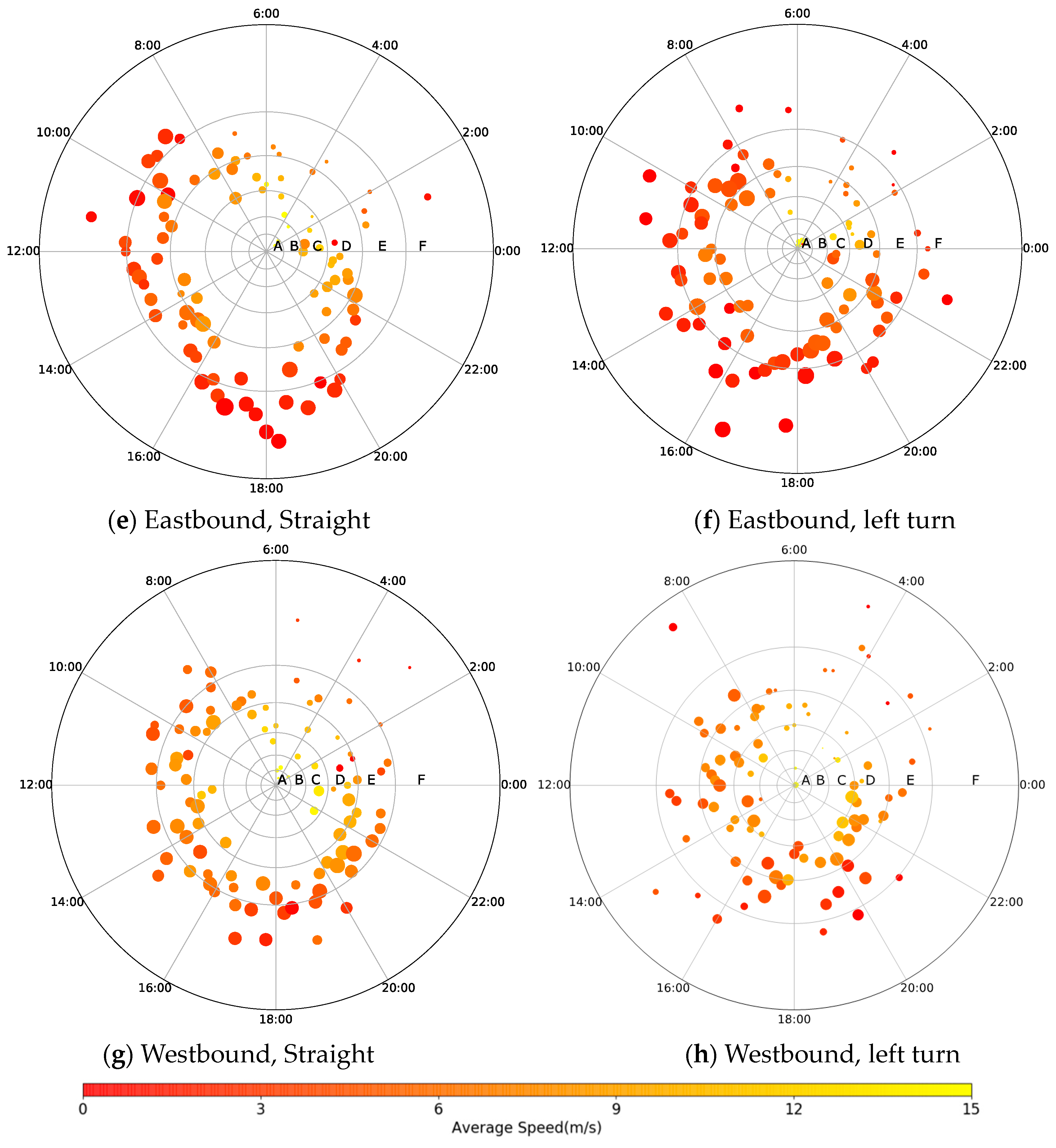
3.2.2. The Traffic Speed
3.2.3. The Ratio of Non-Stop FCD to Stop FCD
3.3. Diagnosis of the Delay Problems for Individual Intersections
4. Discussion and Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Nielsen, O.A.; Frederiksen, R.D.; Simonsen, N. Using expert system rules to establish data for intersections and turns in road networks. Int. Trans. Oper. Res. 1998, 5, 569–581. [Google Scholar] [CrossRef]
- Homburger, W.S.; Hall, J.W.; William, R.R.; Edward, C.S.; Michelle, D.; Loretta, H.; John, J.L.; Matthew, R.; Vernon, H.W. Fundamentals of Traffic Engineering; Institute of Transportation Studies, University of California: Berkeley, CA, USA, 2007. [Google Scholar]
- Wang, Y.; Zheng, Y.; Xue, Y. Travel time estimation of a path using sparse trajectories. In Proceedings of the 20th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 24–27 August 2014; ACM: New York, NY, USA, 2014. [Google Scholar]
- Heidemann, D. Queue length and delay distributions at traffic signals. Transp. Res. Part B Methodol. 1994, 28, 377–389. [Google Scholar] [CrossRef]
- Denney, R.W., Jr.; Curtis, E.; Olson, P. The national traffic signal report card. ITE J. 2012, 82, 22–26. [Google Scholar]
- Liu, X.; Lu, F.; Zhang, H.; Qiu, P. Intersection delay estimation from floating car data via principal curves: A case study on Beijing’s road network. Front. Earth Sci. 2013, 7, 206–216. [Google Scholar] [CrossRef]
- Xiang, J.; Chen, Z. An adaptive traffic signal coordination optimization method based on vehicle-to-infrastructure communication. Clust. Comput. 2016, 19, 1503–1514. [Google Scholar] [CrossRef]
- Cheng, J.; Wu, W.; Cao, J.; Li, K. Fuzzy group-based intersection control via vehicular networks for smart transportations. IEEE Trans. Ind. Inform. 2017, 13, 751–758. [Google Scholar] [CrossRef]
- Liu, W.; Qin, G.; He, Y.; Jiang, F. Distributed cooperative reinforcement learning-based traffic signal control that integrates v2x networks’ dynamic clustering. IEEE Trans. Veh. Technol. 2017, 66, 8667–8681. [Google Scholar] [CrossRef]
- Al Islam, S.M.A.B.; Hajbabaie, A. Distributed coordinated signal timing optimization in connected transportation networks. Transp. Res. Part C Emerg. Technol. 2017, 80, 272–285. [Google Scholar] [CrossRef]
- Feng, Y.; Head, K.L.; Khoshmagham, S.; Zamanipour, M. A real-time adaptive signal control in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2015, 55, 460–473. [Google Scholar] [CrossRef]
- Ghaffarian, H.; Fathy, M.; Soryani, M. Vehicular ad hoc networks enabled traffic controller for removing traffic lights in isolated intersections based on integer linear programming. IET Intell. Transp. Syst. 2012, 6, 115–123. [Google Scholar] [CrossRef]
- Younes, M.B.; Boukerche, A. Intelligent traffic light controlling algorithms using vehicular networks. IEEE Trans. Veh. Technol. 2016, 65, 5887–5899. [Google Scholar] [CrossRef]
- Hu, J.; Park, B.B.; Lee, Y. Coordinated transit signal priority supporting transit progression under connected vehicle technology. Transp. Res. Part C Emerg. Technol. 2015, 55, 393–408. [Google Scholar] [CrossRef]
- He, Q.; Head, K.L.; Ding, J. Multi-modal traffic signal control with priority, signal actuation and coordination. Transp. Res. Part C Emerg. Technol. 2014, 46, 65–82. [Google Scholar] [CrossRef]
- Tomescu, O.; Moise, I.M.; Alina, S.E.; Băţroş, I. Adaptive traffic light control system using ad-hoc vehicular communications network. Upb Sci. Bull. Ser. D 2012, 74, 67–78. [Google Scholar]
- Chou, L.-D.; Deng, B.-T.; Li, D.C.; Kuo, K.-W. A passenger-based adaptive traffic signal control mechanism in Intelligent Transportation Systems. In Proceedings of the 2012 IEEE 12th International Conference on ITS Telecommunications, Taipei, Taiwan, 5–8 November 2012. [Google Scholar]
- Zhang, W.; Tan, G.; Ding, N.; Wang, G. Traffic Congestion Evaluation and Signal Timing Optimization Based on Wireless Sensor Networks: Issues, Approaches and Simulation. Math. Probl. Eng. 2012, 2012, 573171. [Google Scholar] [CrossRef]
- Yildirimoglu, M.; Geroliminis, N. Experienced travel time prediction for congested freeways. Transp. Res. Part B Methodol. 2013, 53, 45–63. [Google Scholar] [CrossRef]
- Laval, J.; Chen, D.; Amer, K.B.; Guin, A. Evolution of oscillations in congested traffic: Improved estimation method and additional empirical evidence. Transp. Res. Rec. 2009, 2124, 194–202. [Google Scholar] [CrossRef]
- Wieczorek, J.; Fernández-Moctezuma, R.J.; Bertini, R.L. Techniques for validating an automatic bottleneck detection tool using archived freeway sensor data. Transp. Res. Rec. 2010, 2160, 87–95. [Google Scholar] [CrossRef]
- Cui, J.; Liu, F.; Janssens, D.; An, S.; Wets, G.; Cools, M. Detecting urban road network accessibility problems using taxi GPS data. J. Transp. Geogr. 2016, 51, 147–157. [Google Scholar] [CrossRef]
- Cui, J.; Liu, F.; Hu, J.; Janssens, D.; Wets, G.; Cools, M. Identifying mismatch between urban travel demand and transport network services using GPS data: A case study in the fast growing Chinese city of Harbin. Neurocomputing 2016, 181, 4–18. [Google Scholar] [CrossRef]
- Bauza, R.; Gozálvez, J. Traffic congestion detection in large-scale scenarios using vehicle-to-vehicle communications. J. Netw. Comput. Appl. 2013, 36, 1295–1307. [Google Scholar] [CrossRef]
- Turksma, S. The Various Uses of Floating Car Data, Road transport information and control. In Proceedings of the Tenth International Conference on (Conf. Publ. No. 472), London, UK, 24–27 July 2000. [Google Scholar]
- Miwa, T.; Tawada, Y.; Yamamoto, T.; Morikawa, T. En-route updating methodology of travel time prediction using accumulated probe-car data. In Proceedings of the 11th ITS World Congress, Nagoya, Japan, 18 October 2004. [Google Scholar]
- Liu, C.; Meng, X.; Fan, Y. Determination of routing velocity with GPS floating car data and webGIS-based instantaneous traffic information dissemination. J. Navig. 2008, 61, 337–353. [Google Scholar] [CrossRef]
- Bar-Gera, H. Evaluation of a cellular phone-based system for measurements of traffic speeds and travel times: A case study from Israel. Transp. Res. Part C Emerg. Technol. 2007, 15, 380–391. [Google Scholar] [CrossRef]
- Leduc, G. Road Traffic Data: Collection Methods and Applications; Working Papers on Energy, Transport and Climate Change; European Commission-Joint Research Centre-Institute for Prospective Technological Studies: Seville, Spain, 2008; p. 1. [Google Scholar]
- Dowling, R.; Skabardonis, A.; Carroll, M.; Wang, Z. Methodology for measuring recurrent and nonrecurrent traffic congestion. Transp. Res. Rec. 2004, 1867, 60–68. [Google Scholar] [CrossRef]
- Xi, L.; Liu, Q.; Li, M.; Liu, Z. Map matching algorithm and its application. Int. J. Comput. Intell. Syst. 2007. [Google Scholar] [CrossRef]
- Luo, A.; Chen, S.; Xv, B. Enhanced map-matching algorithm with a hidden Markov model for mobile phone positioning. ISPRS Int. J. Geo-Inf. 2017, 6, 327. [Google Scholar] [CrossRef]
- Quddus, M.; Washington, S. Shortest path and vehicle trajectory aided map-matching for low frequency GPS data. Transp. Res. Part C Emerg. Technol. 2015, 55, 328–339. [Google Scholar] [CrossRef]
- He, Z.; Zheng, L.; Chen, P.; Guan, W. Mapping to cells: A simple method to extract traffic dynamics from probe vehicle data. Comput.-Aided Civ. Infrastruct. Eng. 2017, 32, 252–267. [Google Scholar] [CrossRef]
- Gao, M.; Zhu, T.; Wan, X.; Wang, Q. Analysis of travel time patterns in urban using taxi GPS data. In Proceedings of the 2013 IEEE International Conference on Green Computing and Communications and IEEE Internet of Things and IEEE Cyber, Physical and Social Computing, Beijing, China, 20–23 August 2013; pp. 512–517. [Google Scholar]
- DiDi. 2017. Available online: http://www.xiaojukeji.com/en/company.html (accessed on 30 August 2017).
- Shih, G. China taxi apps Didi Dache and Kuaidi Dache announce $6 billion tie-up. Reuters, 14 February 2015. [Google Scholar]
- Deng, B.; Steve, D.; Vassilis, Z.; Jin, Y. Estimating traffic delays and network speeds from lowfrequency GPS taxis traces for urban transport modelling. Eur. J. Transp. Infrast. Res. 2015, 15, 639–661. [Google Scholar]
- Zhao, X.-J.; Zhao, J.-Y. Research on model of resource management for traffic grid. Procedia Eng. 2011, 15, 1476–1480. [Google Scholar] [CrossRef]
- Sun, L. An approach for Intersection Delay Estimate Based on Floating Vehicles. Master’s Thesis, Beijing University of Technology, Beijing, China, 2007. (In Chinese). [Google Scholar]
- Zhang, H.; Lu, F.; Zhou, L.; Duan, Y. Computing turn delay in city road network with GPS collected trajectories. In Proceedings of the 2011 International Workshop on Trajectory Data Mining and Analysis, Beijing, China, 18 September 2011; ACM: New York, NY, USA, 2011. [Google Scholar]
- Brown, D.T.; Racca, D.P. Study and Calculation of Travel Time Reliability Measures; Center for Applied Demography & Survey Research: Newark, DE, USA, 2012. [Google Scholar]
- Heng, W.E.I.; Harikishan, C. Perugu. Oversaturation inherence and traffic diversion effect at urban intersections through simulation. J. Transp. Syst. Eng. Inf. Technol. 2009, 9, 72–82. [Google Scholar]
- He, Q.; Head, K.L.; Ding, J. PAMSCOD: Platoon-based arterial multi-modal signal control with online data. Transp. Res. Part C Emerg. Technol. 2012, 20, 164–184. [Google Scholar] [CrossRef]
- Gühnemann, A.; Schäfer, R.; Thiessenhusen, K.; Wagner, P. Monitoring Traffic and Emissions by Floating Car Data; Institute of Transport Studies Working Paper, Issue ITS-WP-04-07; Institute of Transport Studies: Sydney, Australia, 2004. [Google Scholar]
- Kong, X.; Xu, Z.; Shen, G.; Wang, J.; Yang, Q.; Zhang, B. Urban traffic congestion estimation and prediction based on floating car trajectory data. Future Gener. Comput. Syst. 2016, 61, 97–107. [Google Scholar] [CrossRef]
- Angell, L.; Aitch, S.; Antin, J.; Wotring, B. An Exploration of Driver Behavior During Turns at Intersections (for Drivers in Different Age Groups); National Surface Transportation Safety Center for Excellence (NSTSCE, VTTI): Blacksburg, VA, USA, 2015.
- Wang, X.; Zhao, D.; Peng, H.; LeBlanc, D.J. Analysis of unprotected intersection left-turn conflicts based on naturalistic driving data. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Redondo Beach, CA, USA, 11–14 June 2017. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Field Name | Field Type | Field Description |
|---|---|---|---|
| Terminal ID | String | 6 bytes characters, marking each vehicle | |
| GPS time stamp | Timestamp | Accurate to second | |
| Longitude | Floating | Accurate to six decimal places | |
| Latitude | Floating | Accurate to six decimal places | |
| Vehicle Speed | Integer | Kilometer per hour |
| Parameter Notation | Definition |
|---|---|
| Time stamp of the point of the trajectory j starting stop | |
| Time stamp of the point of the trajectory j ending stop | |
| Time stamp of the point of the trajectory j enter intersection | |
| Time stamp of the point of the trajectory j exit intersection | |
| Time deviation of the trajectory j enter intersection | |
| Time deviation of the trajectory j exit intersection | |
| The last point outside the intersection whose coordinate is , point m in the trajectory j | |
| The entry point of intersection side whose coordinate is | |
| The inside point of intersection whose coordinate is , the point m + 1 in the trajectory j | |
| The exit point of intersection side whose coordinate is | |
| The first point outside the intersection whose coordinate is , the point m + 2 in the trajectory j | |
| The number of the trajectories in terms of 5 min time slices, . |
| Parameter Notation | Definition |
|---|---|
| The number of stops of FCD | |
| The number of non-stops of FCD | |
| The ratio of non-stop FCD to stop FCD in the direction i of the intersection | |
| The speed of the trajectory j passing through the intersection in the direction i | |
| The time stamp of the first point of the trajectory j in phase whose speed is 0 m/s. | |
| The time stamp of the last point of the trajectory j in phase whose speed is 0 m/s. | |
| n | The number of the phases |
| The red time of phases . | |
| The effective green time in the phase , ranges from 1 to n. | |
| C | A signal cycle |
| The green ratio time in the phase , ranges from 1 to n. | |
| The traffic volume of the direction i of intersections | |
| The flow ratio in direction i | |
| The ratio between the flow ratio and the green signal ratio in the direction i of the phase . |
| Parameter Notation | Southbound | Northbound | Eastbound | Westbound | ||||
|---|---|---|---|---|---|---|---|---|
| Through | Left-Turn | Through | Left-Turn | Through | Left-Turn | Through | Left-Turn | |
| Traffic Flow | 328,692 | 17,348 | 237,894 | 19,728 | 18,065 | 20,047 | 16,388 | 12,347 |
| Average velocity | 3.20 | 2.39 | 3.19 | 2.11 | 2.64 | 2.53 | 3.13 | 2.63 |
| Free Flow travel time | 15 | 24 | 18 | 24 | 24 | 22 | 17 | 24 |
| Average Delay time | 52.61 | 64.22 | 50.60 | 81.88 | 57.53 | 62.53 | 64.79 | 49.09 |
| Parameter Notation | Northbound | Southbound | Eastbound | Westbound | ||||
|---|---|---|---|---|---|---|---|---|
| Through | Left Turn | Through | Left Turn | Through | Left Turn | Through | Left Turn | |
| NOSF | 156,073 | 16,219 | 217,461 | 13,349 | 14,254 | 15,164 | 12,012 | 8441 |
| Total | 0.81 | 0.10 | 0.79 | 0.16 | 0.74 | 0.66 | 0.68 | 0.76 |
| Evening peak | 0.68 | 0.07 | 1.04 | 0.075 | 0.92 | 0.93 | 1.06 | 0.96 |
| Morning peak | 1.15 | 0.088 | 0.90 | 0.073 | 0.74 | 0.80 | 0.36 | 0.70 |
| Parameter Notation | Northbound | Southbound | Eastbound | Westbound | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Through | Left Turn | Through | Left Turn | Through | Left Turn | Through | Left Turn | |||||||||
| Max | Min | Max | Min | Max | Min | Max | Min | Max | Min | Max | Min | Max | Min | Max | Min | |
| 0.421 | 0.271 | 0.039 | 0.012 | 0.581 | 0.404 | 0.033 | 0.014 | 0.039 | 0.015 | 0.040 | 0.016 | 0.032 | 0.006 | 0.029 | 0.010 | |
| 1.064 | 0.740 | 0.120 | 0.030 | 2.131 | 1.015 | 0.083 | 0.044 | 0.191 | 0.047 | 0.099 | 0.039 | 0.178 | 0.016 | 0.075 | 0.029 | |
| Mean | Med | Mean | Med | Mean | Med | Mean | Med | Mean | Med | Mean | Med | Mean | Med | Mean | Med | |
| 0.344 | 0.357 | 0.029 | 0.031 | 0.497 | 0.487 | 0.025 | 0.025 | 0.028 | 0.029 | 0.030 | 0.032 | 0.024 | 0.025 | 0.019 | 0.020 | |
| 0.928 | 0.946 | 0.075 | 0.076 | 1.357 | 1.295 | 0.064 | 0.065 | 0.127 | 0.138 | 0.078 | 0.081 | 0.112 | 0.118 | 0.049 | 0.052 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, D.; Yan, X.; Liu, F.; Liu, X.; Wang, L.; Zhang, J. Evaluating and Diagnosing Road Intersection Operation Performance Using Floating Car Data. Sensors 2019, 19, 2256. https://doi.org/10.3390/s19102256
Chen D, Yan X, Liu F, Liu X, Wang L, Zhang J. Evaluating and Diagnosing Road Intersection Operation Performance Using Floating Car Data. Sensors. 2019; 19(10):2256. https://doi.org/10.3390/s19102256
Chicago/Turabian StyleChen, Deqi, Xuedong Yan, Feng Liu, Xiaobing Liu, Liwei Wang, and Jiechao Zhang. 2019. "Evaluating and Diagnosing Road Intersection Operation Performance Using Floating Car Data" Sensors 19, no. 10: 2256. https://doi.org/10.3390/s19102256
APA StyleChen, D., Yan, X., Liu, F., Liu, X., Wang, L., & Zhang, J. (2019). Evaluating and Diagnosing Road Intersection Operation Performance Using Floating Car Data. Sensors, 19(10), 2256. https://doi.org/10.3390/s19102256