Geometric Self-Calibration of YaoGan-13 Images Using Multiple Overlapping Images


Abstract
:1. Introduction
2. Methodology
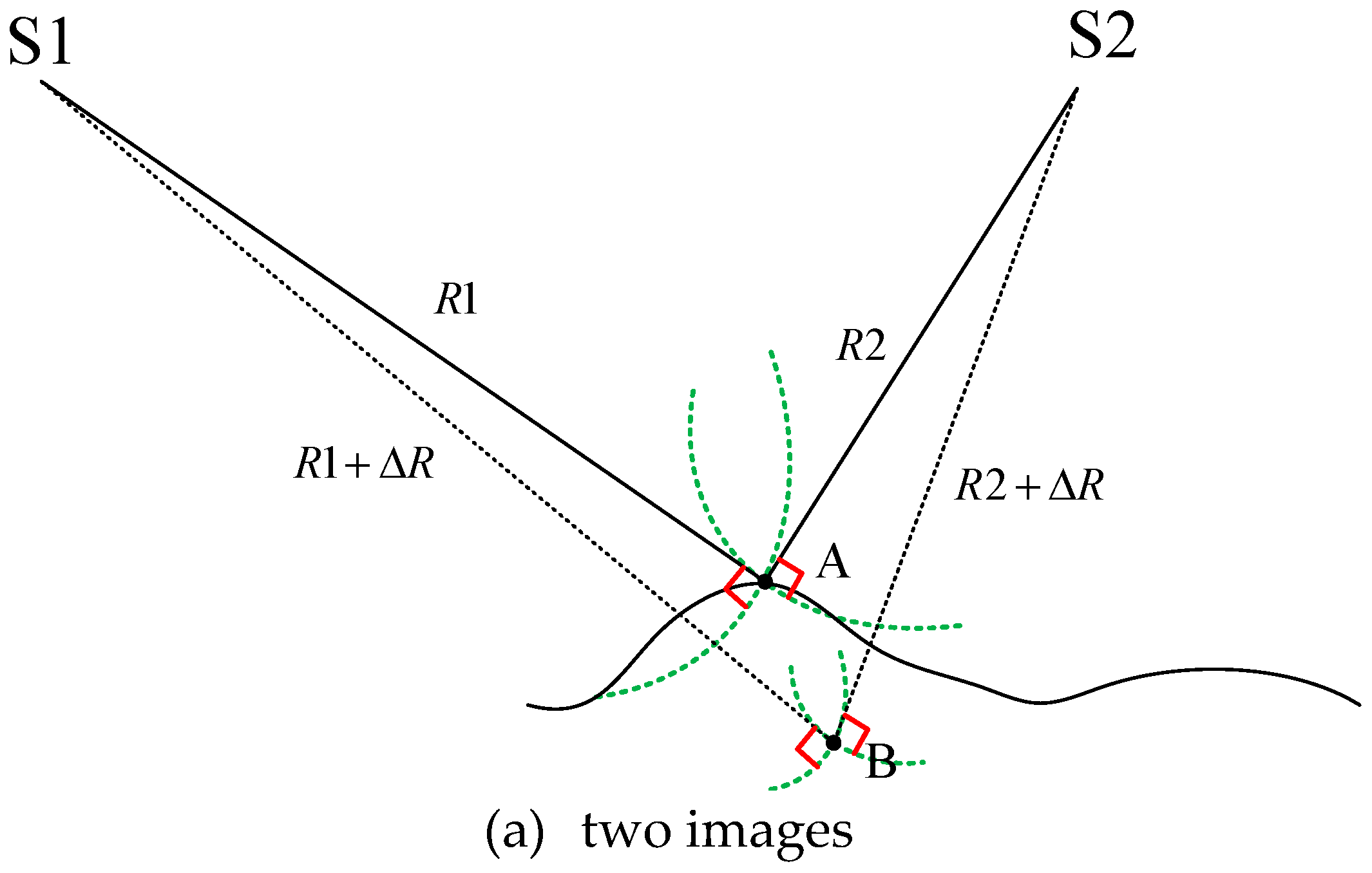
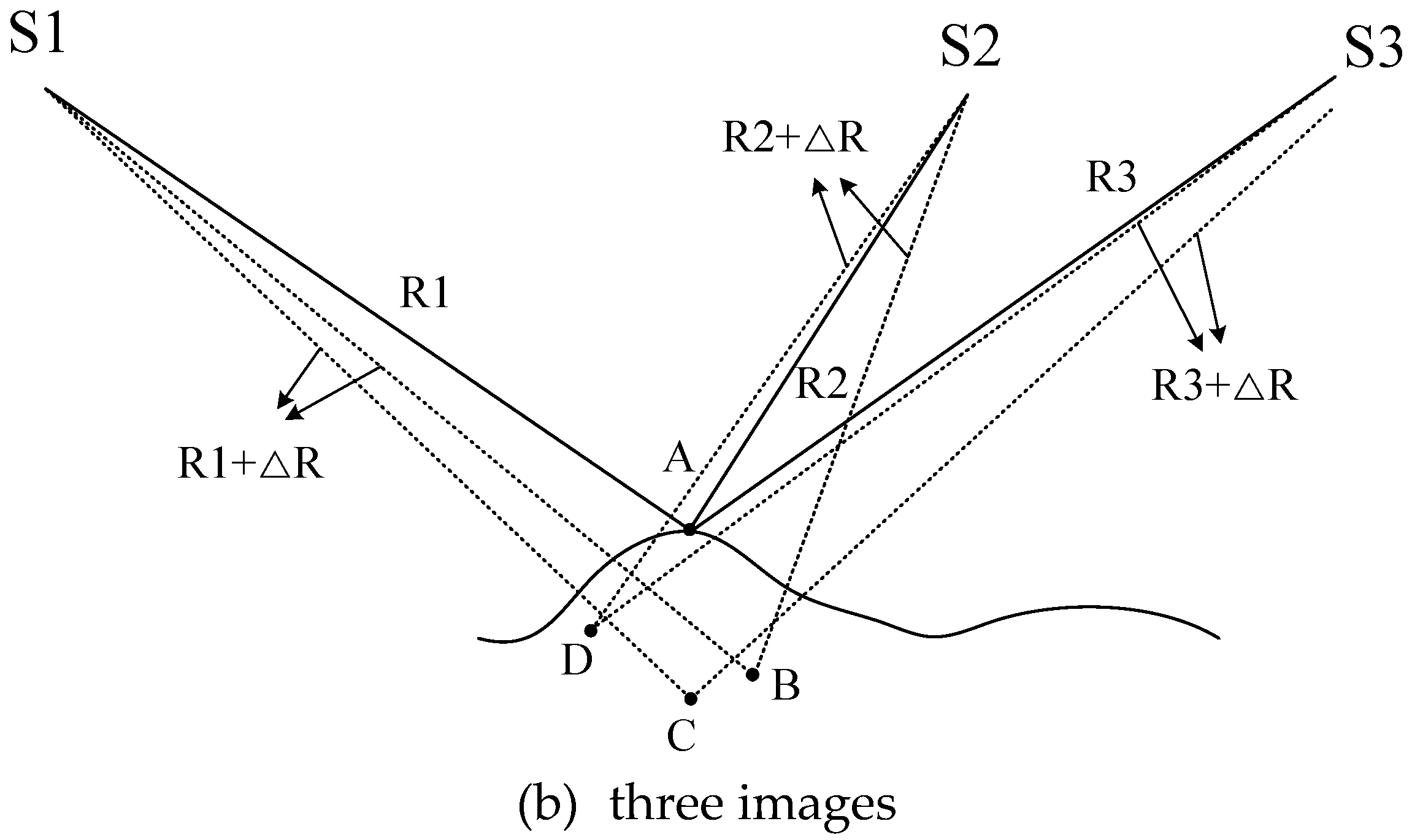
2.1. Fundamental Theory of the Proposed Method
2.2. Proposed Geometric Self-Calibration Method
- ,
- , and
- .
- ,
- ,
- ,
- ,
- ,
- ,
- , and
- ,
- Select the conjugate points. Measure the image plane coordinates of the conjugate points on each image;
- Obtain information on geometric positioning parameters. Find and calculate the imaging time , Doppler center frequency , and slant range of the target point from the auxiliary files. Find and calculate the position vector and velocity vector of the satellite;
- Determine the initial value of the unknown parameters. The measurement errors of the slant range and the systematic azimuth shifts are typically not large, so the initial values of the slant range correction and systematic azimuth shifts can be set to 0. The initial values of are then calculated using a least squares spatial point intersection [22];
- Calculate the approximate values of the slant range and the Doppler center frequency for each conjugate point. The approximate values of these unknown parameters are then substituted into the slant range equation (Equation (1)) and the Doppler equation (Equation (2)) to calculate the approximate values of the slant range and the Doppler center frequency , respectively, for each conjugate point;
- Calculate the coefficient and constant terms of the error equation (Equation (4)), point by point to establish the error equation;
- Calculate the coefficient matrix and constant term of the normal equation (Equation (6)) to establish the normal equation;
- Calculate the slant range and ground coordinate corrections of the conjugate points and add them to the corresponding approximate values to obtain the new approximate ground coordinates of the conjugate points and the slant range correction;
- Calculate the slant range error. Check if the calculation converges by comparing the ground coordinate corrections of the conjugate points and the slant range error with the prescribed error limits: The correction of the slant range error is usually evaluated against a limit of 0.1 m. When the correction of the slant range error is less than 0.1 m, the iteration ends and proceeds to Step 9, otherwise, repeat Steps 4–8 with the newest approximation until the error limits are met;
- Calculate the systematic azimuth shifts . Calculate the image plane coordinates of the conjugate points by using the inverse location algorithm with the new approximate ground coordinates of the conjugate points, then update the azimuth imaging time [23]. Recalculate the position vectors and the velocity vectors of the satellite. Set the slant range correction to 0 and the initial ground coordinates of the conjugate points used are the results of the previous iteration. Repeat Steps 4–9 until the correction of the systematic azimuth shift is less than the limit;
- The accurate values of and are obtained.
3. Experiment and Analysis
3.1. Experimental Study Areas and Data Sources
3.2. Results of Proposed Self-Calibration Method
3.3. Validation of Self-Calibration Accuracy
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Deng, M.; Zhang, G.; Zhao, R.; Zhang, Q.; Li, D.; Li, J. Assessment of the geolocation accuracy of YG-13A high-resolution SAR data. Remote Sens. Lett. 2018, 9, 101–110. [Google Scholar] [CrossRef]
- Deng, M.; Zhang, G.; Zhao, R.; Li, S.; Li, J. Improvement of Gaofen-3 absolute positioning accuracy based on cross-calibration. Sensors 2017, 17, 2903. [Google Scholar] [CrossRef] [PubMed]
- Schwerdt, M.; Brautigam, B.; Bachmann, M.; Doring, B.; Schrank, D.; Gonzalez, J.H. Final TerraSAR-X calibration results based on novel efficient methods. IEEE Trans. Geosci. Remote Sens. 2010, 48, 677–689. [Google Scholar] [CrossRef]
- Mohr, J.J.; Madsen, S.N. Geometric calibration of ERS satellite SAR images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 842–850. [Google Scholar] [CrossRef]
- Small, D.; Schubert, A. “Guide to ASAR Geocoding.” University of Zurich. Available online: http://www.geo.uzh.ch/microsite/rsl-documents/research/publications/other-sci-communications/2008_RSL-ASAR-GC-AD-v101-0335607552/2008_RSL-ASAR-GC-AD-v101.pdf (accessed on 30 April 2008).
- Shimada, M.; Isoguchi, O.; Tadono, T.; Isono, K. PALSAR radiometric and geometric calibration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3915–3932. [Google Scholar] [CrossRef]
- Eineder, M.; Minet, C.; Steigenberger, P.; Cong, X.; Fritz, T. Imaging geodesy – Toward centimeter-level ranging accuracy with TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2011, 49, 661–671. [Google Scholar] [CrossRef]
- Schubert, A.; Small, D.; Miranda, N.; Geudtner, D.; Meier, E. Sentinel-1A product geolocation accuracy: Commissioning phase results. Remote Sens. 2015, 7, 9431–9449. [Google Scholar] [CrossRef]
- Schwerdt, M.; Schmidt, K.; Ramon, N.T.; Alfonzo, G.C.; Döring, B.J.; Zink, M.; Prats-Iraola, P. Independent verification of the Sentinel-1A system calibration. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1097–1100. [Google Scholar] [CrossRef]
- Zhao, R.; Zhang, G.; Deng, M.; Yang, F.; Chen, Z.; Zheng, Y. Multimode hybrid geometric calibration of spaceborne SAR considering atmospheric propagation delay. Remote Sens. 2017, 9, 464. [Google Scholar] [CrossRef]
- Zhao, R.; Zhang, G.; Deng, M.; Xu, K.; Guo, F. Geometric calibration and accuracy verification of the GF-3 satellite. Sensors 2017, 17, 1977. [Google Scholar] [CrossRef] [PubMed]
- Luscombe, A.P. RADARSAT-2 SAR image quality and calibration operations. Can. J. Remote Sens. 2004, 30, 345–354. [Google Scholar] [CrossRef]
- Luscombe, A. Image Quality and Calibration of RADARSAT-2. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Cape Town, South Africa, 12–17 July 2009; pp. II-757–II-760. [Google Scholar]
- Covello, F.; Battazza, F.; Coletta, A.; Lopinto, E.; Fiorentino, C.; Pietranera, L.; Valentini, G.; Zoffoli, S. COSMO-SkyMed an existing opportunity for observing the Earth. J. Geodyn. 2010, 49, 171–180. [Google Scholar] [CrossRef] [Green Version]
- Kubik, P.; Lebègue, L.; Fourest, S.; Delvit, J.M.; de Lussy, F.; Greslou, D.; Blanchet, G. First In-flight Results of Pleiades 1A Innovative Methods for Optical Calibration. In Proceedings of the International Conference of Space Optics—ICSO 2012, Ajaccio, France, 9–12 October 2012; p. 1056407. [Google Scholar]
- Zhang, G.; Xu, K.; Zhang, Q.; Li, D. Correction of pushbroom satellite imagery interior distortions independent of ground control points. Remote Sens. 2018, 10, 98. [Google Scholar] [CrossRef]
- Liu, X.; Liu, J.; Hong, W. The analysis of the precision in spaceborne SAR image location. J. Remote Sens. 2006, 10, 76–81. [Google Scholar]
- Liu, X.; Ma, H.; Sun, W. Study on the geolocation algorithm of space-borne SAR image. In Advances in Machine Vision, Image Processing, and Pattern Analysis. IWICPAS 2006. Lecture Notes in Computer Science 4153; Zheng, N., Jiang, X., Lan, X., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 270–280. [Google Scholar]
- Jehle, M.; Perler, D.; Small, D.; Schubert, A.; Meier, E. Estimation of atmospheric path delays in TerraSAR-X data using models vs. measurements. Sensors 2008, 8, 8479–8491. [Google Scholar] [CrossRef] [PubMed]
- Schubert, A.; Jehle, M.; Small, D.; Meier, E. Influence of Atmospheric Path Delay on the Absolute Geolocation Accuracy of TerraSAR-X High-Resolution Products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 751–758. [Google Scholar] [CrossRef]
- Breit, H.; Fritz, T.; Balss, U.; Lachaise, M.; Niedermeier, A.; Vonavka, M. TerraSAR-X SAR processing and products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 727–740. [Google Scholar] [CrossRef]
- Raggam, H.; Gutjahr, K.; Perko, R.; Schardt, M. Assessment of the stereo-radargrammetric mapping potential of TerraSAR-X multibeam spotlight data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 971–977. [Google Scholar] [CrossRef]
- Jiang, Y.H.; Zhang, G. Research on the methods of inner calibration of spaceborne SAR. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 914–916. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bandwidth and Pulse Width | Image ID | Imaging Time | Central Angle | Orbit | Look-Side |
|---|---|---|---|---|---|
| 200 MHz and 24.4 μs | A1 | 2015-12-28 | 36.1° | Asc | R |
| B1 | 2016-01-03 | 43.1° | Desc | R | |
| C1 | 2016-01-16 | 26.8° | Asc | R | |
| D1 | 2016-01-18 | 31.4° | Desc | R | |
| E1 | 2016-01-19 | 37.5° | Asc | L | |
| F1 | 2016-03-03b | 24.8° | Asc | L | |
| G1 | 2016-03-11 | 37.1° | Desc | R | |
| H1 | 2016-03-26a | 23.6° | Desc | R | |
| I1 | 2016-03-27a | 15.2° | Desc | L | |
| J1 | 2016-03-27b | 31.2° | Asc | L |
| Bandwidth and Pulse Width | Image ID | Imaging Time | Central Angle | Orbit | Look-Side |
|---|---|---|---|---|---|
| 150 MHz and 24.4 μs | A2 | 2015-12-29 | 46.1° | Desc | R |
| B2 | 2016-01-04 | 46.9° | Asc | L | |
| C2 | 2016-01-07a | 54.6° | Desc | R | |
| D2 | 2016-01-17a | 50.9° | Desc | R | |
| E2 | 2016-01-17b | 48.9° | Asc | R | |
| F2 | 2016-03-10 | 45.5° | Asc | R | |
| G2 | 2016-03-15 | 48.0° | Asc | R | |
| H2 | 2016-03-26b | 50.4° | Asc | L | |
| I2 | 2016-03-29b | 38.0° | Asc | R | |
| J2 | 2016-03-30 | 53.8° | Asc | R |
| Combination | Slant Range Correction (m) | Systematic Azimuth Shifts (ms) |
|---|---|---|
| A1-B1-C1 | 15.96 | −0.126 |
| A1-B1-C1-D1 | 15.72 | −0.131 |
| A1-B1-C1-D1-E1 | 15.88 | −0.140 |
| A1-B1-C1-D1-E1-F1 | 16.35 | −0.126 |
| A1-B1-C1-D1-E1-F1-G1 | 16.19 | −0.118 |
| A1-B1-C1-D1-E1-F1-G1-H1 | 17.55 | −0.120 |
| A1-B1-C1-D1-E1-F1-G1-H1-I1 | 16.61 | −0.128 |
| A1-B1-C1-D1-E1-F1-G1-H1-I1-J1 | 16.57 | −0.134 |
| Combination | Slant Range Correction (m) | Systematic Azimuth Shifts (ms) |
|---|---|---|
| A2-B2-C2 | 17.34 | 0.009 |
| A2-B2-C2-D2 | 17.16 | −0.000 |
| A2-B2-C2-D2-E2 | 16.90 | −0.083 |
| A2-B2-C2-D2-E2-F2 | 15.81 | −0.131 |
| A2-B2-C2-D2-E2-F2-G2 | 15.73 | −0.133 |
| A2-B2-C2-D2-E2-F2-G2-H2 | 16.12 | −0.130 |
| A2-B2-C2-D2-E2-F2-G2-H2-I2 | 17.13 | −0.144 |
| A2-B2-C2-D2-E2-F2-G2-H2-I2-J2 | 16.97 | −0.137 |
| Validation Group | Bandwidth and Pulse Width | Test Site | Imaging Time | Control Data | Number of ICPs |
|---|---|---|---|---|---|
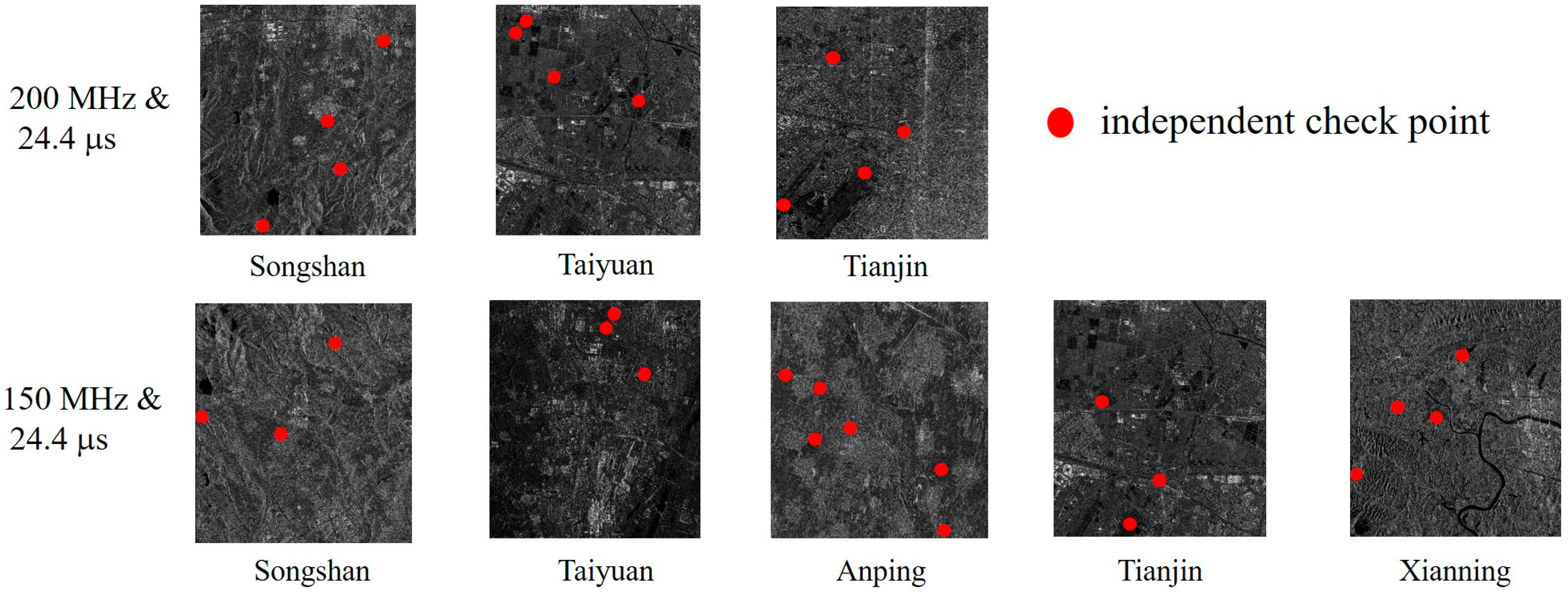
| A | 200 MHz and 24.4 μs | Songshan | 2016-03-29b | Six Corner reflectors | 4 |
| Taiyuan | 2016-05-28 | 1:5000 DOM/DEM | 4 | ||
| Tianjin | 2016-05-29 | 1:2000 DOM/DEM | 4 | ||
| B | 150 MHz and 24.4 μs | Songshan | 2016-04-02 | Six Corner reflectors | 3 |
| Taiyuan | 2016-06-01 | 1:5000 DOM/DEM | 3 | ||
| Anping | 2016-06-09 | GPS control points | 6 | ||
| Tianjin | 2016-06-10 | 1:2000 DOM/DEM | 3 | ||
| Xianning | 2016-06-12 | GPS control points | 4 |
| Calibration Plan | Combination | Absolute Positioning Accuracy (m) | ||
|---|---|---|---|---|
| North | East | Plane | ||
| Plan 1 * | None | 6.93 | 28.64 | 29.47 |
| Plan 2 | A1-B1-C1 | 1.65 | 3.06 | 3.47 |
| Plan 3 | A1-B1-C1-D1 | 1.74 | 3.41 | 3.83 |
| Plan 4 | A1-B1-C1-D1-E1 | 1.70 | 3.16 | 3.59 |
| Plan 5 | A1-B1-C1-D1-E1-F1 | 1.52 | 2.46 | 2.89 |
| Plan 6 | A1-B1-C1-D1-E1-F1-G1 | 1.56 | 2.70 | 3.12 |
| Plan 7 | A1-B1-C1-D1-E1-F1-G1-H1 | 1.12 | 0.87 | 1.42 |
| Plan 8 | A1-B1-C1-D1-E1-F1-G1-H1-I1 | 1.43 | 2.06 | 2.51 |
| Plan 9 | A1-B1-C1-D1-E1-F1-G1-H1-I1-J1 | 1.45 | 2.11 | 2.56 |
| Calibration Plan | Combination | Absolute Positioning Accuracy (m) | ||
|---|---|---|---|---|
| North | East | Plane | ||
| Plan 1 * | None | 5.41 | 22.11 | 22.76 |
| Plan 2 | A2-B2-C2 | 1.44 | 1.54 | 2.11 |
| Plan 3 | A2-B2-C2-D2 | 1.40 | 1.71 | 2.21 |
| Plan 4 | A2-B2-C2-D2-E2 | 0.96 | 1.97 | 2.19 |
| Plan 5 | A2-B2-C2-D2-E2-F2 | 0.94 | 3.18 | 3.31 |
| Plan 6 | A2-B2-C2-D2-E2-F2-G2 | 0.95 | 3.27 | 3.41 |
| Plan 7 | A2-B2-C2-D2-E2-F2-G2-H2 | 0.89 | 2.82 | 2.96 |
| Plan 8 | A2-B2-C2-D2-E2-F2-G2-H2-I2 | 0.70 | 1.75 | 1.89 |
| Plan 9 | A2-B2-C2-D2-E2-F2-G2-H2-I2-J2 | 0.74 | 1.91 | 2.05 |
| Validation Group | Calibration Method | Absolute Positioning Accuracy (m) | ||
|---|---|---|---|---|
| North | East | Plane | ||
| A | Conventional field calibration | 1.04 | 0.78 | 1.30 |
| Self-calibration | 1.74 | 3.41 | 3.83 | |
| Difference between the two methods | — | 2.53 | ||
| B | Conventional field calibration | 0.70 | 1.52 | 1.67 |
| Self-calibration | 0.95 | 3.27 | 3.41 | |
| Difference between the two methods | — | 1.74 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Deng, M.; Cai, C.; Zhao, R. Geometric Self-Calibration of YaoGan-13 Images Using Multiple Overlapping Images. Sensors 2019, 19, 2367. https://doi.org/10.3390/s19102367
Zhang G, Deng M, Cai C, Zhao R. Geometric Self-Calibration of YaoGan-13 Images Using Multiple Overlapping Images. Sensors. 2019; 19(10):2367. https://doi.org/10.3390/s19102367
Chicago/Turabian StyleZhang, Guo, Mingjun Deng, Chenglin Cai, and Ruishan Zhao. 2019. "Geometric Self-Calibration of YaoGan-13 Images Using Multiple Overlapping Images" Sensors 19, no. 10: 2367. https://doi.org/10.3390/s19102367
APA StyleZhang, G., Deng, M., Cai, C., & Zhao, R. (2019). Geometric Self-Calibration of YaoGan-13 Images Using Multiple Overlapping Images. Sensors, 19(10), 2367. https://doi.org/10.3390/s19102367