Indoor Localization within Multi-Story Buildings Using MAC and RSSI Fingerprint Vectors


Abstract
:1. Introduction
2. Main Idea of Proposed Approach
3. Data Collection and Database Establishment
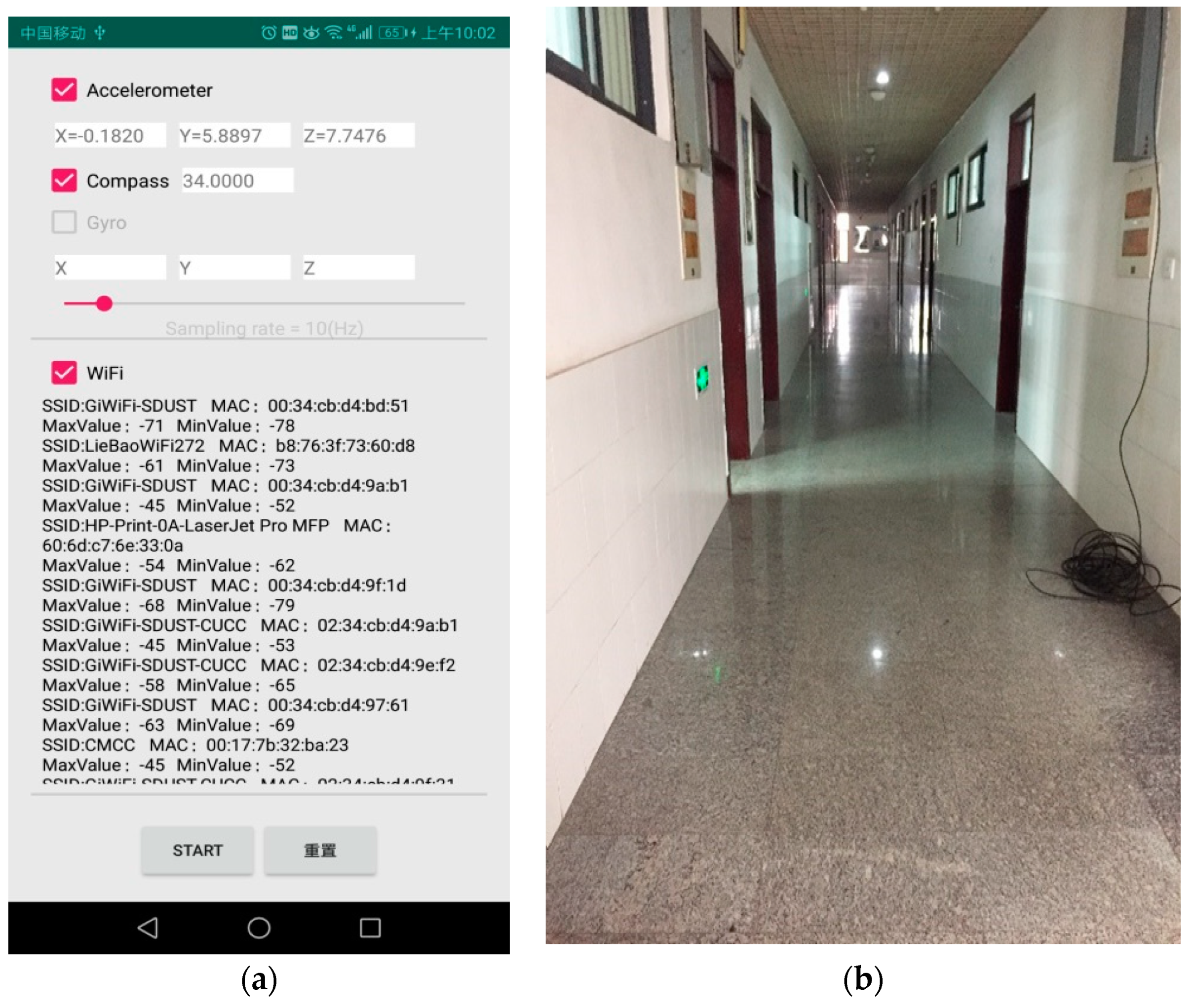
3.1. Data Collection
3.2. Database Establishment
4. Indoor Localization Based on MAC and RSSI
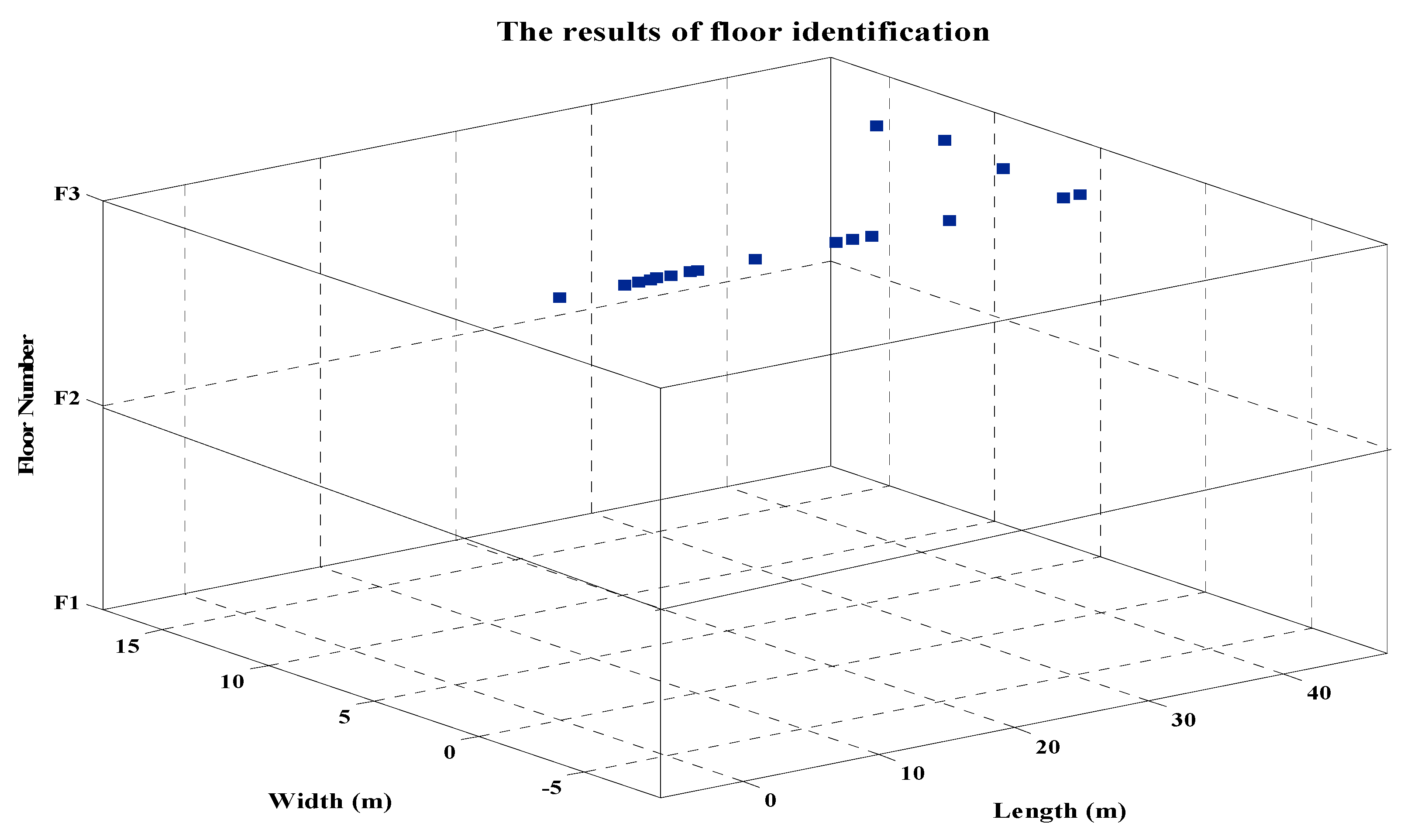
4.1. Floor Identification
4.2. Two-Step Positioning on The Same Floor
4.2.1. Clustering-Based Coarse Positioning
4.2.2. Precise Positioning
5. Experimental Evaluation and Discussion
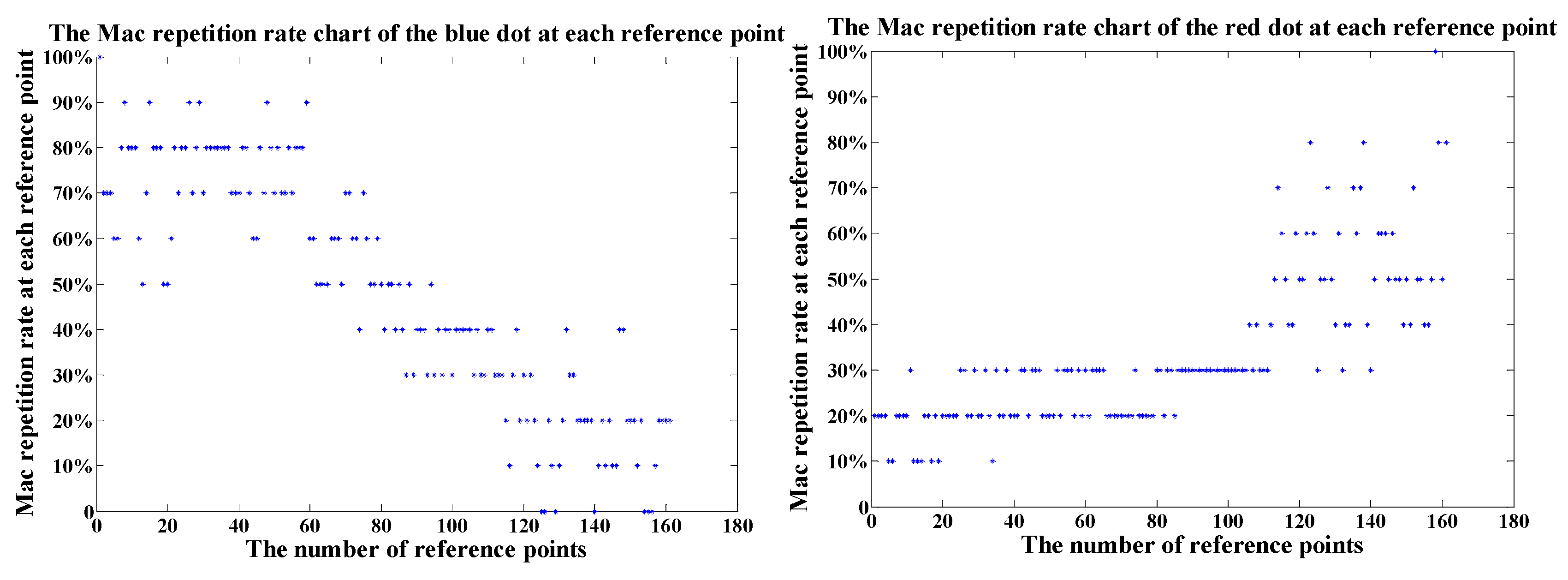
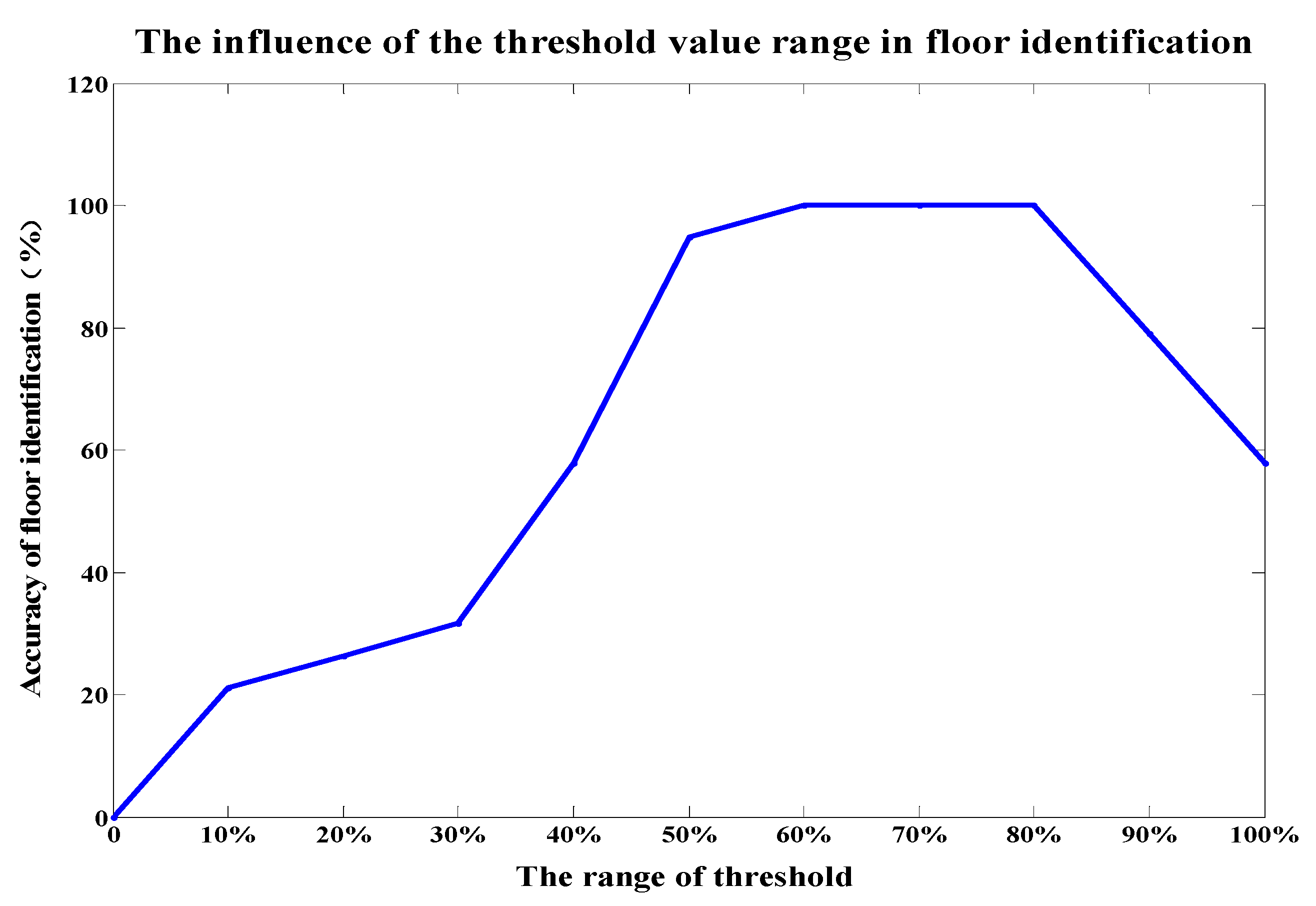
5.1. Threshold Determination of MAC Repetition Rate
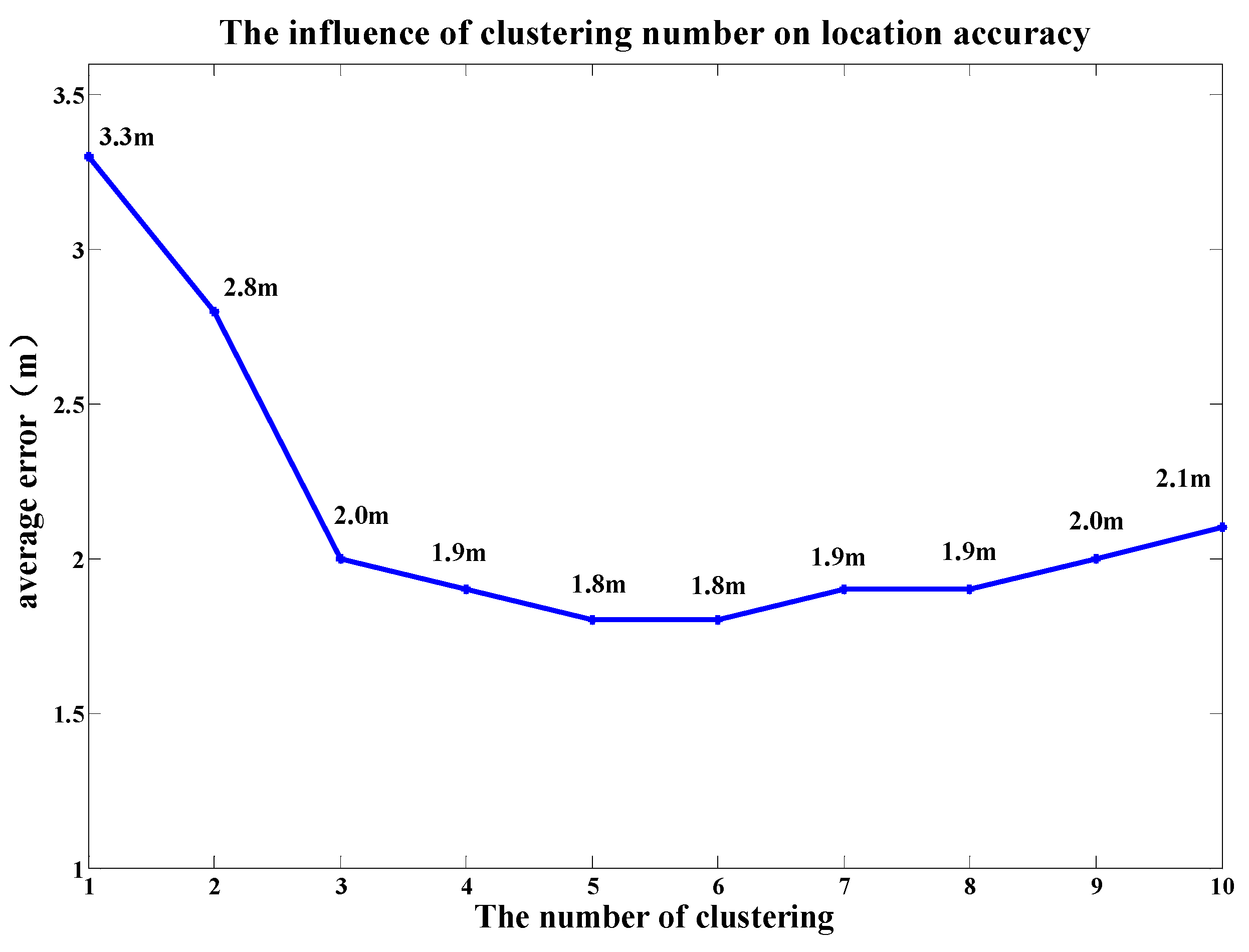
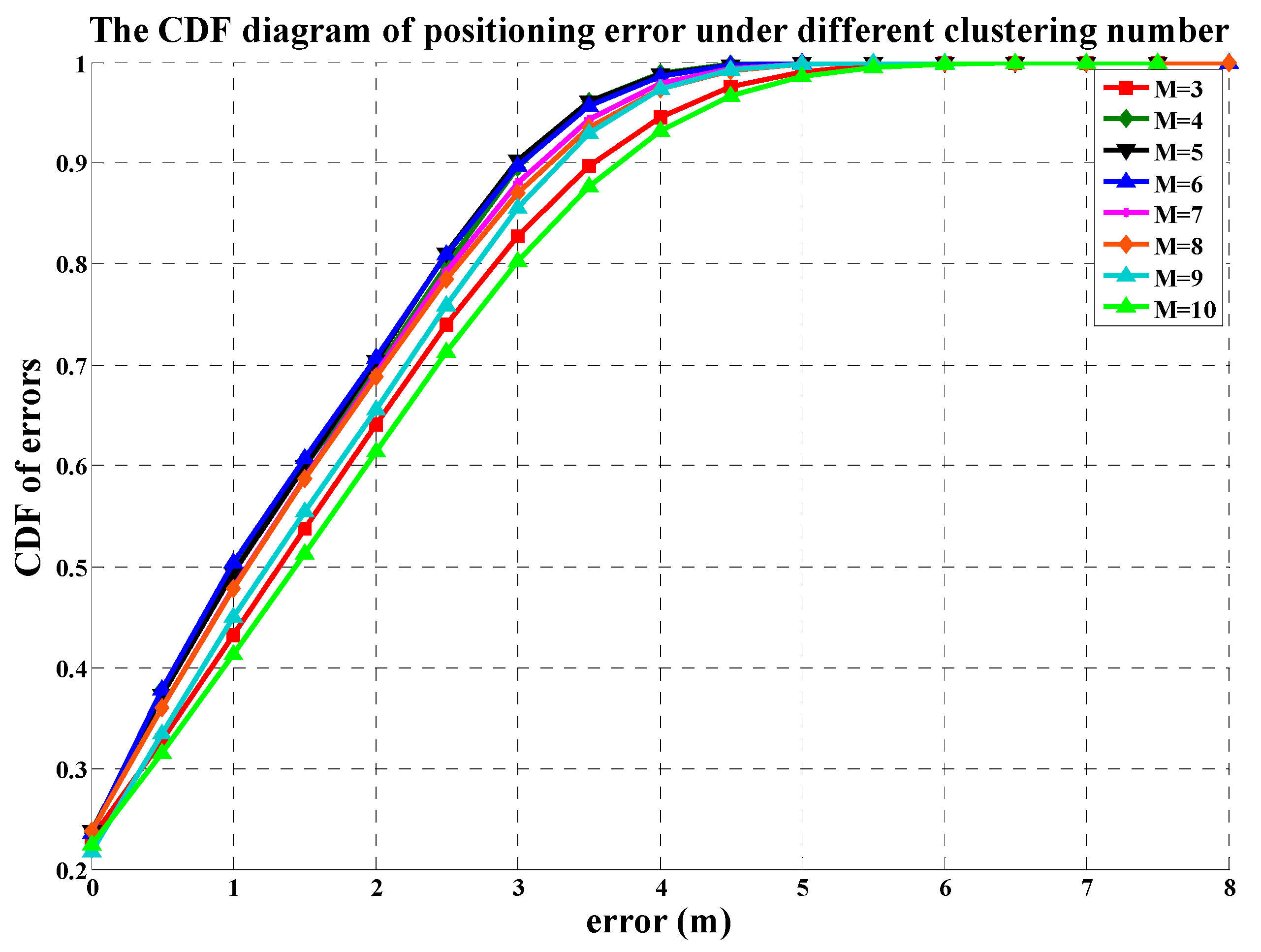
5.2. Impact of Clustering Number on Positioning Accuracy
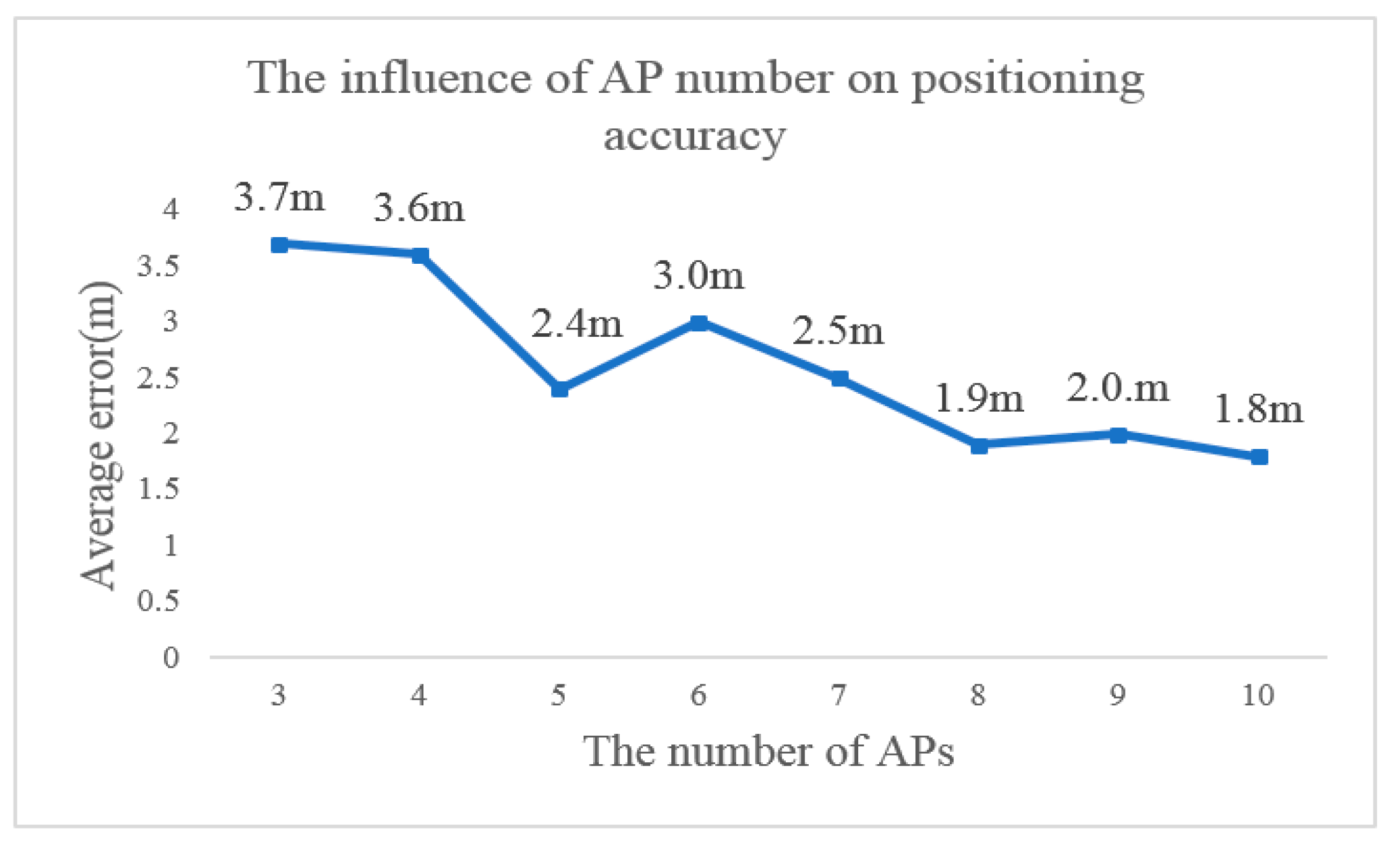
5.3. Impact of Number of APs on Positioning Accuracy
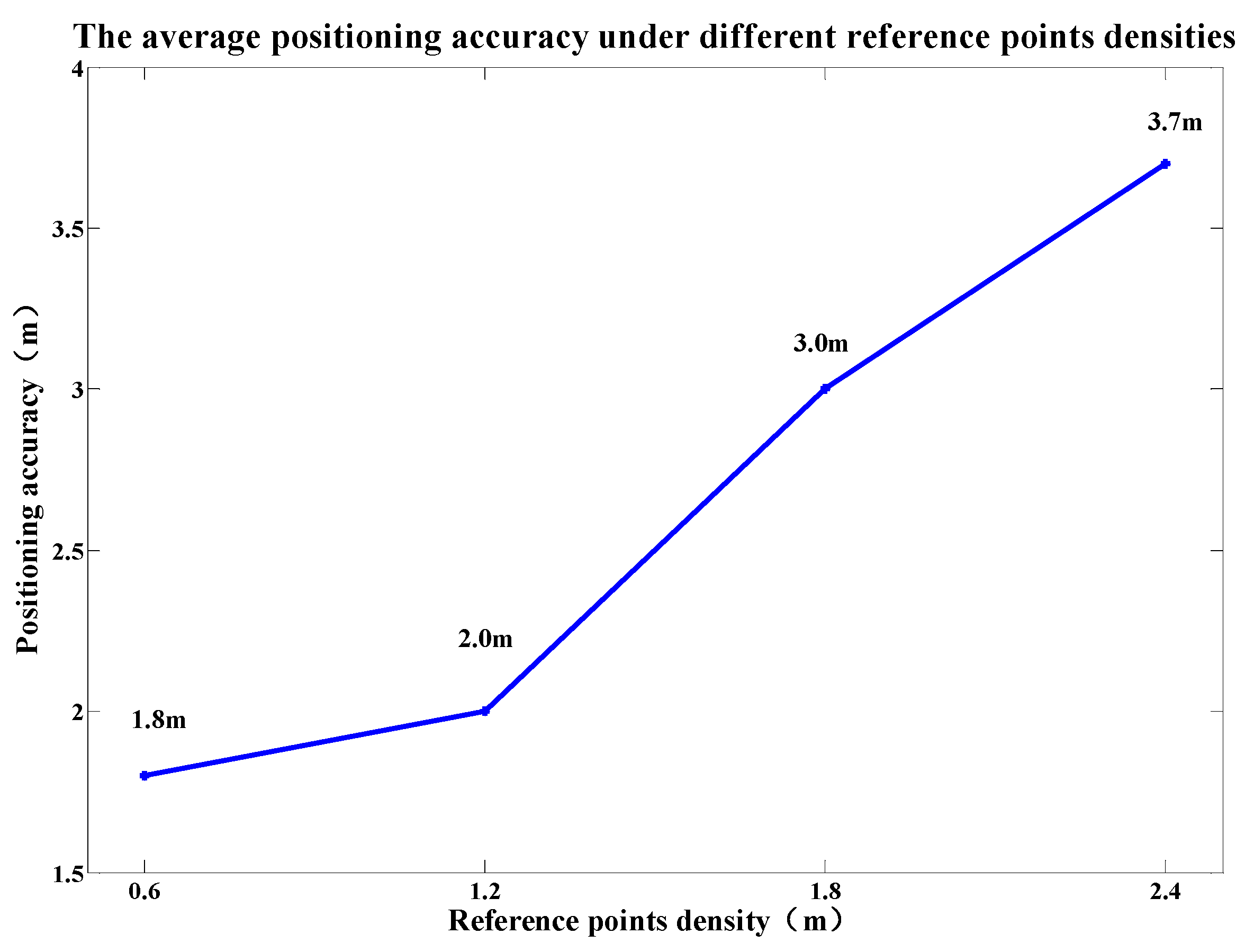
5.4. Impact of Reference Point Density on Positioning Accuracy
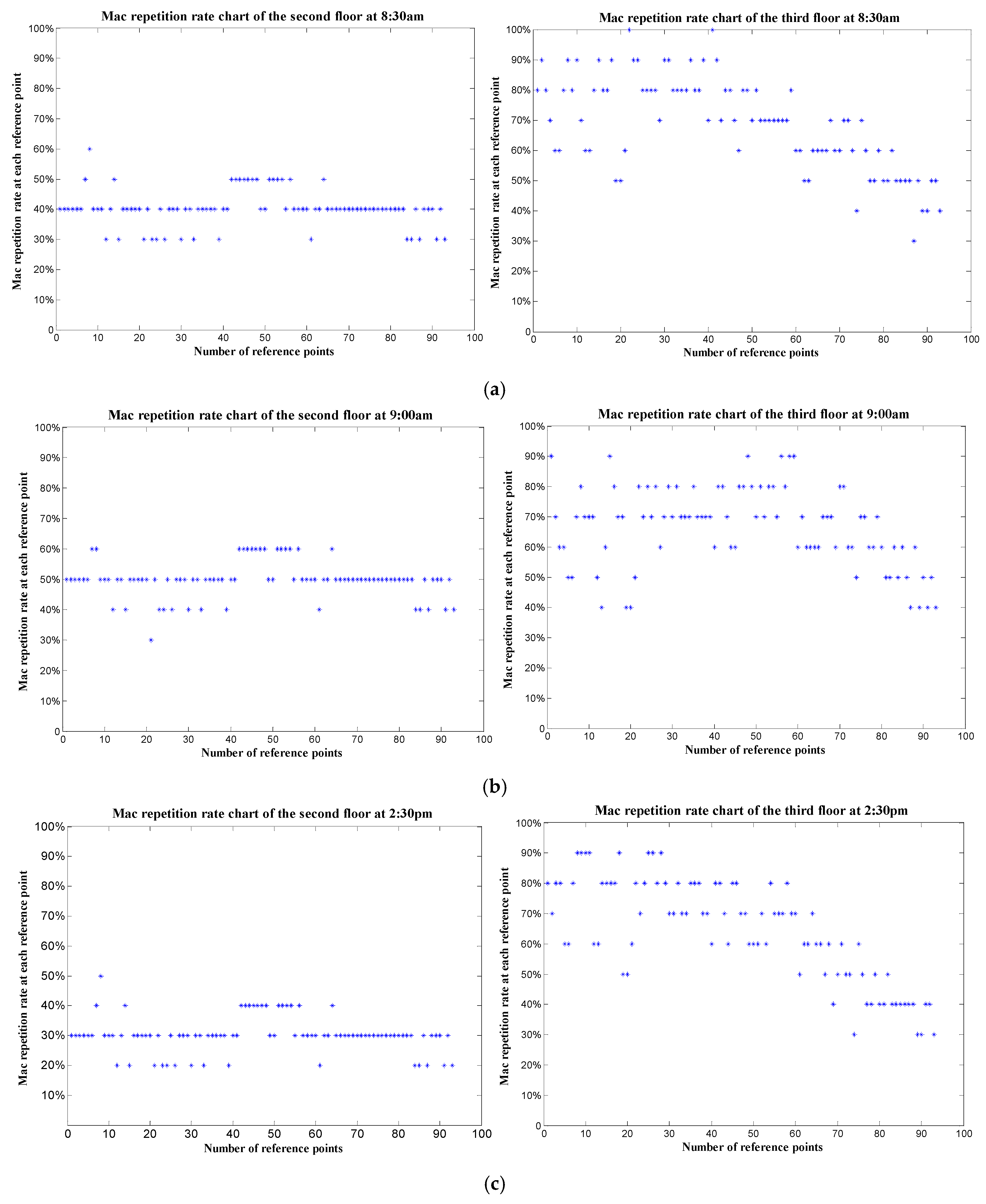
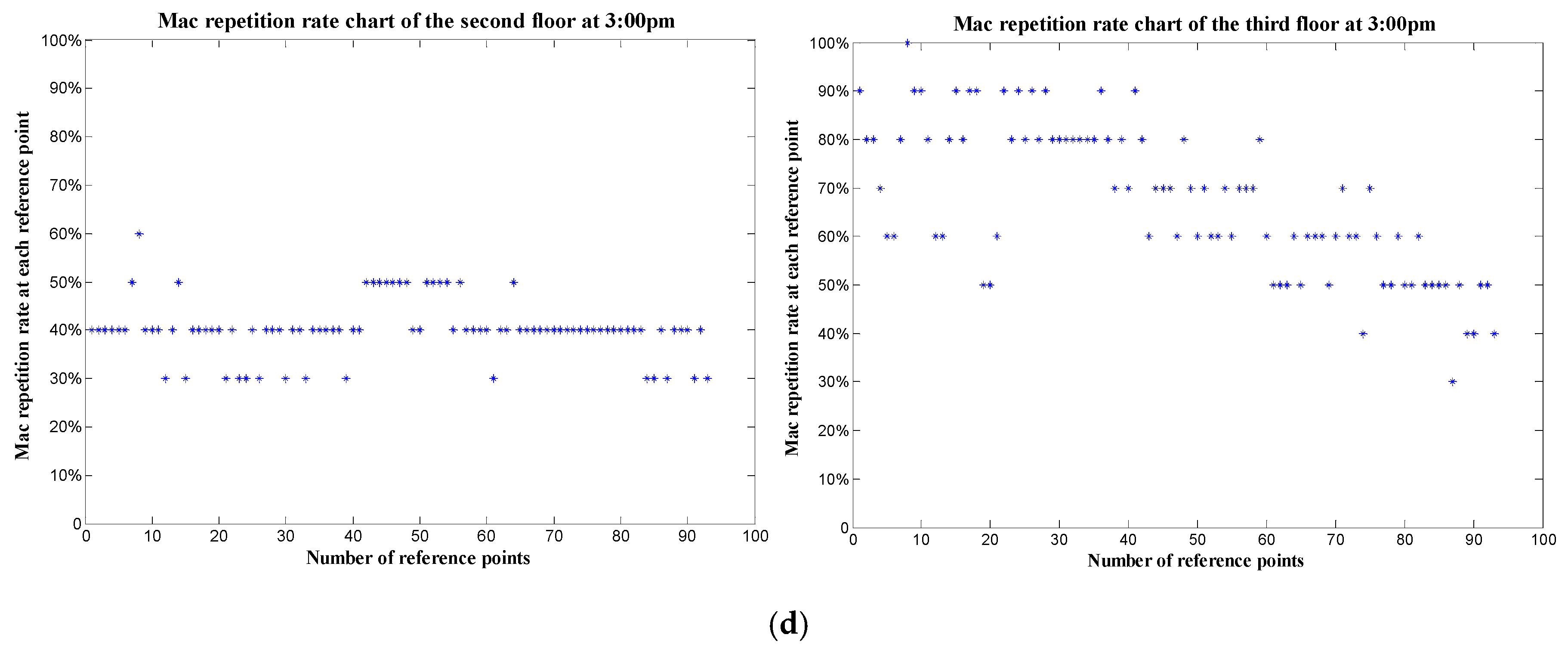
5.5. Change of the MAC Repetition Rate at the Same Point during a Day
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, R.; Chen, L. Indoor Positioning with Smartphones: The State-of-the-art and the Challenges. Acta Geophys. Cartogr. Sin. 2017, 46, 1316–1326. [Google Scholar]
- Khalajmehrabadi, A.; Gatsis, N.; Akopian, D. Modern WLAN Fingerprinting Indoor Positioning Methods and Deployment Challenges. IEEE Commun. Surv. Tutor. 2017. [Google Scholar] [CrossRef]
- Zhao, H.; Huang, B.; Jia, B. Applying kriging interpolation for WiFi fingerprinting based indoor positioning systems. In Proceedings of the IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016. [Google Scholar]
- Li, Z.; Liu, C.; Gao, J.; Li, X. An Improved WiFi/PDR Integrated System Using an Adaptive and Robust Filter for Indoor Localization. ISPRS Int. J. Geo-Inf. 2016, 5, 224. [Google Scholar] [CrossRef]
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.C.; Xie, L. Fusion of WiFi, Smartphone Sensors and Landmarks Using the Kalman Filter for Indoor Localization. Sensors 2015, 15, 715–732. [Google Scholar]
- Chen, G.; Meng, X.; Wang, Y.; Zhang, Y.; Tian, P.; Yang, H. Integrated WiFi/PDR/Smartphone Using an Unscented Kalman Filter Algorithm for 3D Indoor Localization. Sensors 2015, 15, 24595–24614. [Google Scholar] [CrossRef] [Green Version]
- Chen, G.; Zhang, Y.; Wang, Y.; Meng, X. Unscented Kalman filter algorithm for WiFi-PDR integrated indoor positioning. Acta Geophys. Cartogr. Sin. 2015, 44, 1314–1321. [Google Scholar]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2015, 18, 466–490. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhou, Q.; Niu, X.; El-Sheimy, N. A Hybrid WiFi/Magnetic Matching/PDR Approach for Indoor Navigation with Smartphone Sensors. IEEE Commun. Lett. 2016, 20, 169–172. [Google Scholar] [CrossRef]
- Zhang, A.; Yuan, Y.; Wu, Q.; Zhu, S.; Deng, J. Wireless Localization Based on RSSI Fingerprint Feature Vector. Int. J. Distrib. Sens. Netw. 2015, 11, 528747. [Google Scholar] [CrossRef]
- Deng, Z.; Wang, W.J.; Xu, L. A K-Means Based Method to Identify Floor in WLAN Indoor Positioning System. Software 2012, 33, 114–117. [Google Scholar]
- Varshavsky, A.; LaMarca, A.; Hightower, J.; Lara, E. The SkyLoc floor localization system. In Proceedings of the Fifth Annual IEEE International Conference on Pervasive Computing and Communications, White Plains, NY, USA, 19–23 March 2007. [Google Scholar]
- Li, H.; Qi, S. Indoor Map Information Based WiFi Positioning Technology for Multi-Floor Building. J. Univ. Electron. Sci. Technol. China 2017, 46, 32–37. [Google Scholar]
- Ai, H.; Li, T.; Wang, Y. Method to Identify Floor in WiFi Fingerprinting Location System. J. Wuhan Univ. Technol. 2015, 3, 269–273. [Google Scholar]
- Liu, K. Study on Human Activity Recognition Method Based on Indoor Location and Multiple Contexts. Ph.D. Thesis, China University of Mining and Technology, Xuzhou, China, 2017. [Google Scholar]
- Liu, K.; Wang, Y.; Wang, J. Differential Barometric Altimetry Assists Floor Identification in WLAN Location Fingerprinting Study. In Principle and Application Progress in Location-Based Services; Liu, C., Ed.; Springer International Publishing: Cham, Switzerland, 2014. [Google Scholar]
- Chen, W.; Chang, Q.; Hou, H.; Wang, W. A Novel Clustering and KWNN-Based Strategy for Wi-Fi Fingerprint Indoor Localization. In Proceedings of the International Conference on Computer Science and Network Technology, Harbin, China, 19–20 December 2015. [Google Scholar]
- Luo, J.; Fu, L. A Smartphone Indoor Localization Algorithm Based on WLAN Location Fingerprinting with Feature Extraction and Clustering. Sensors 2017, 17, 1339. [Google Scholar] [CrossRef]
- Kong, G.; Yang, L.; Sun, D. Research on an Algorithm of Fingerprint Location Based on K-Means and WKNN. GNSS World China 2016, 41, 89–92. [Google Scholar]
- He, C.; Guo, S.; Wu, Y.; Yang, Y. A Novel Radio Map Construction Method to Reduce Collection Effort for Indoor Localization. Measurement 2016, 94, 423–431. [Google Scholar] [CrossRef]
- Liu, C.Y.; Wang, J. A constrained KNN indoor positioning model based on geometric clustering finger-printing technique. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 1287–1292. [Google Scholar]
- Lv, N.; Shan, Z.L.; Zhang, F. Voronoi Based on Access Point Fingerprint Clustering Localization Algorithm. Chin. J. Sens. Actuators 2017, 12, 165–171. [Google Scholar]
- Sun, Y.; He, Y.; Meng, W.; Zhang, X. Voronoi Diagram and Crowdsourcing-Based Radio Map Interpolation for GRNN Fingerprinting Localization Using WLAN. Sensors 2018, 18, 3579. [Google Scholar] [CrossRef] [PubMed]
- Tan, Z.; Zhang, H. Modified Mobile Location Algorithm Based on RSSI. J. Beijing Univ. Posts Telecommun. 2013, 36, 88–91. [Google Scholar]
- Song, C.; Wang, J. WLAN Fingerprint Indoor Positioning Strategy Based on Implicit Crowdsourcing and Semi-Supervised Learning. ISPRS Int. J. Geo-Inf. 2017, 6, 356. [Google Scholar] [CrossRef]
- Alshami, I.H.; Ahmad, N.A.; Sahibuddin, S.; Firdaus, F. Adaptive Indoor Positioning Model Based on WLAN-Fingerprinting for Dynamic and Multi-Floor Environments. Sensors 2017, 17, 1789. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Feng, X.; Yao, L. A Novel Error Modified Method for RSSI Location Algorithm Based on Neural Network. Appl. Mech. Mater. 2015, 5, 738–739. [Google Scholar] [CrossRef]
- Song, C.; Wang, J.; Yuan, G. Hidden Naive Bayes Indoor Fingerprinting Localization Based on Best-Discriminating AP Selection. ISPRS Int. J. Geo-Inf. 2016, 5, 189. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference Points | Floor | ||||
|---|---|---|---|---|---|
| Testing Point | P1 | P2 | P3 | P4 | P5 | P6 | P7 | P8 | P9 |
| Localization Error (m) | 1.3 | 1.3 | 0.4 | 1.2 | 0.6 | 3.6 | 0.6 | 2.8 | 1.3 |
| Testing Point | P10 | P11 | P12 | P13 | P14 | P15 | P16 | P17 | P18 |
| Localization Error (m) | 0.6 | 3.2 | 3.1 | 3.0 | 2.5 | 0.6 | 3.7 | 0.6 | 1.5 |
| MAC Repetition Rate | 40% | 50% | 60% | 70% | 80% | 90% | 100% |
| Count | 2 | 14 | 206 | 650 | 419 | 133 | 16 |
| MAC Repetition Rate | 40% | 50% | 60% | 70% | 80% | 90% | 100% |
| Count | 1 | 9 | 107 | 535 | 543 | 232 | 13 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Jiang, L.; Kong, Q.; Wang, J.; Zhang, A.; Song, S. Indoor Localization within Multi-Story Buildings Using MAC and RSSI Fingerprint Vectors. Sensors 2019, 19, 2433. https://doi.org/10.3390/s19112433
Han L, Jiang L, Kong Q, Wang J, Zhang A, Song S. Indoor Localization within Multi-Story Buildings Using MAC and RSSI Fingerprint Vectors. Sensors. 2019; 19(11):2433. https://doi.org/10.3390/s19112433
Chicago/Turabian StyleHan, Litao, Li Jiang, Qiaoli Kong, Ji Wang, Aiguo Zhang, and Shiming Song. 2019. "Indoor Localization within Multi-Story Buildings Using MAC and RSSI Fingerprint Vectors" Sensors 19, no. 11: 2433. https://doi.org/10.3390/s19112433
APA StyleHan, L., Jiang, L., Kong, Q., Wang, J., Zhang, A., & Song, S. (2019). Indoor Localization within Multi-Story Buildings Using MAC and RSSI Fingerprint Vectors. Sensors, 19(11), 2433. https://doi.org/10.3390/s19112433