ES-DPR: A DOA-Based Method for Passive Localization in Indoor Environments


Abstract
:1. Introduction
1.1. Problem Statement
1.2. Contributions
- Best to our knowledge, it is the first time for the indoor passive positioning method to combine the DOA and RSS estimate results of the array signals. ES-DPR shows good accuracy and robustness of DOA estimation in both uncorrelated and coherent cases. It shows significant superiority under low signal-to-noise ratios (SNR) and limited snapshot situations.
- The proposed direct-path recognition algorithm can identify the true bearing of the target with only one base-station. It can achieve high direct-path recognition accuracy and distinguish the “no direct-path” case, which is common in the indoor environment. It is new and superior to the existing method.
- Furthermore, the proposed method is easy for deployment. It can implement the localization job with single base station (one ULA) which is very attractive for practical applications.
1.3. Organization
2. Preliminary and Methods
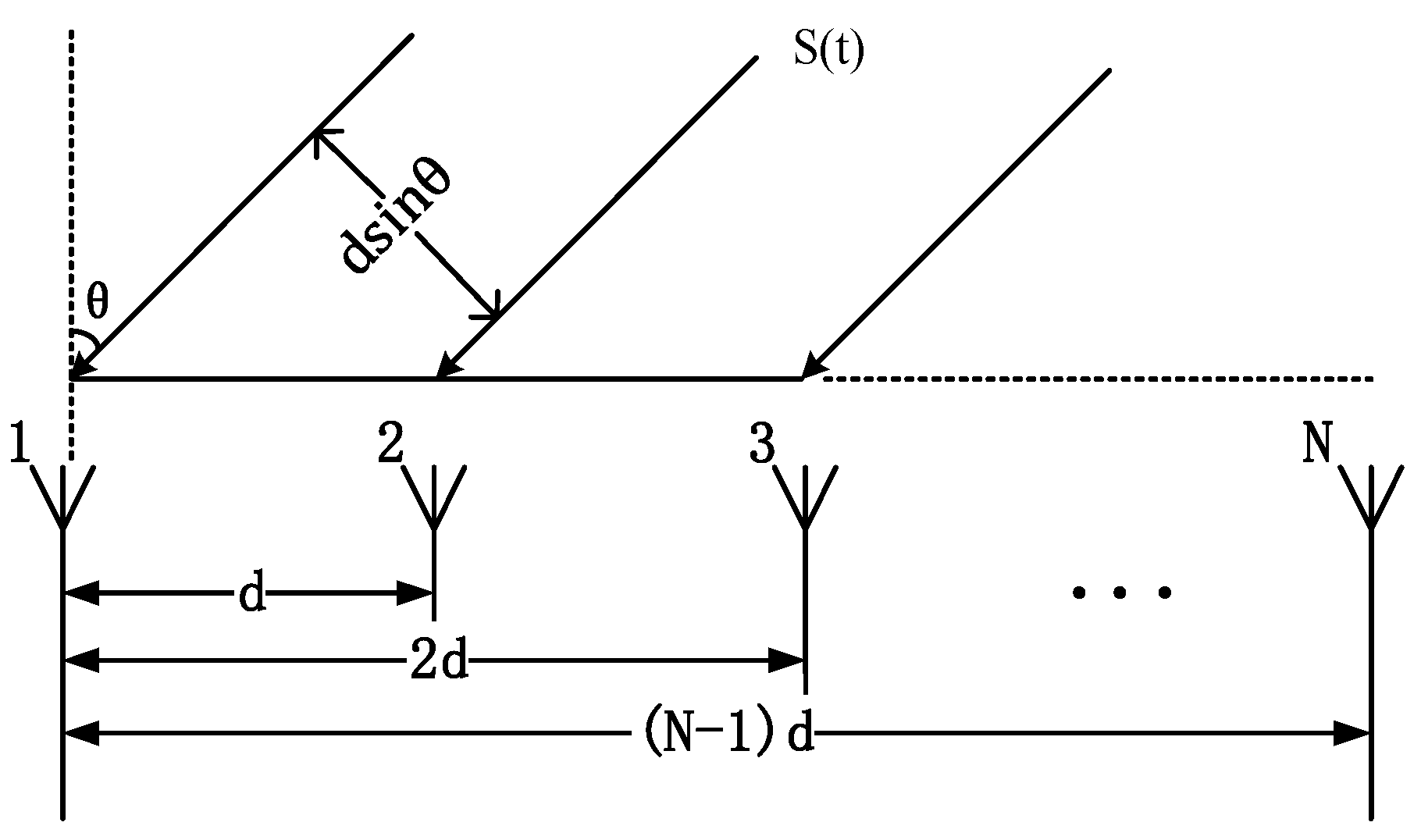
2.1. Signal model
2.2. MUSIC Algorithm and Spatial Smoothing Scheme
2.3. Eigenspace-Based DOA Algorithm ES-DOA
2.4. Direct path Recognition Approach
| Algorithm 1 Direct Path Recognition (DPR) |
| Input: N: number of the antennas; K: number of the multipath signals; M: number of the estimation groups; v: number of the signal snapshots; Δϕ: angel step; : the DOA and power estimation joint set. Output: : the DOA estimation result of the direct path. Process: 1: Calculate the distribution of the DOA estimation Θ in (14) by using the histogram method. 2: Select the K intervals with the most members to form the candidate bearing collection C = {ϕ1, ϕ2, …, ϕK} 3: Calculate the 0-norm value , mean value of the DOA and power and standard deviation of each category ϕ in set C. 4: Obtain the statistic characteristic set of each category 5: Calculate the index of one or several categories with the largest as the output of classifier h1 6: Calculate the category index with the minimum as the output of classifier h2 7: Calculate the category index with the minimum as the output of classifier h3 8: Calculate the DOA estimation result of the direct path from the joint classifier H by using an absolute majority voting method 9: The direct-path recognition processing is done. |
2.5. Crossover Localization
3. Numerical Examples and Discussion
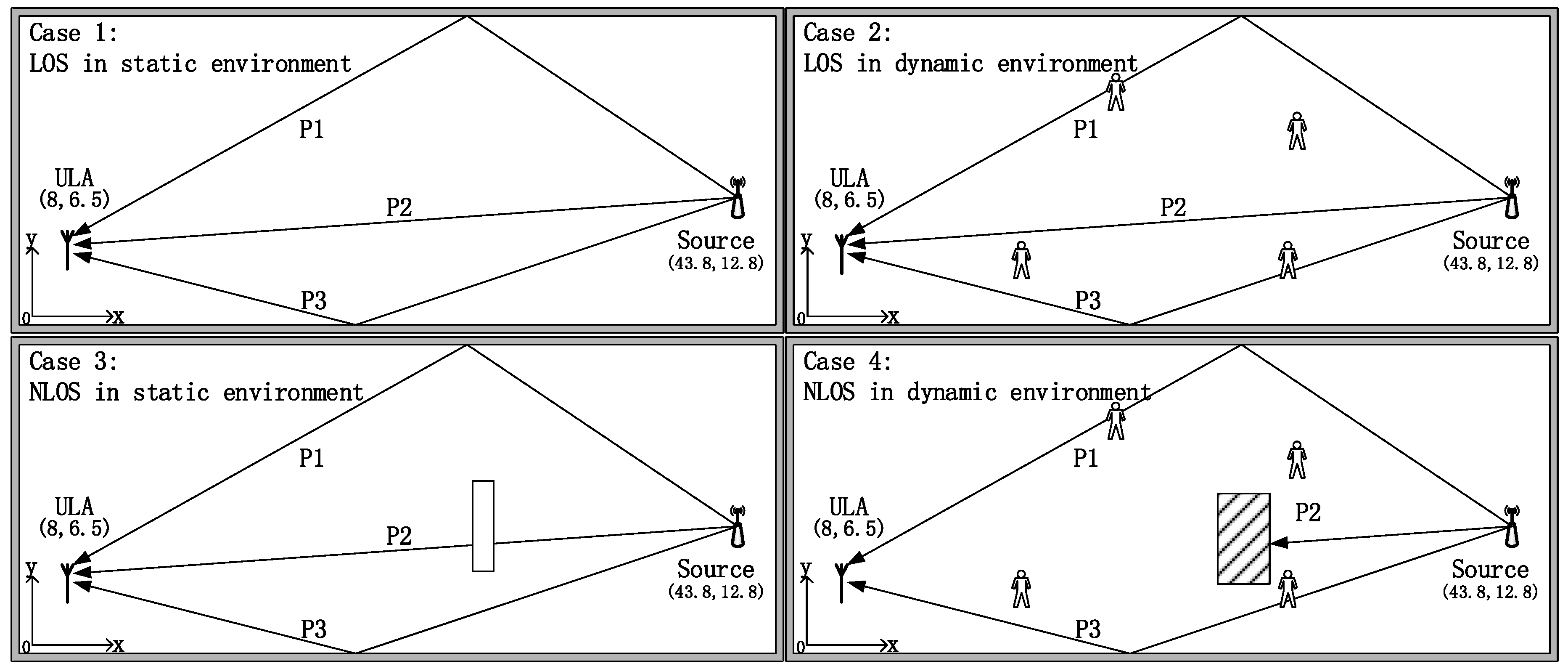
3.1. Simulation Conditions
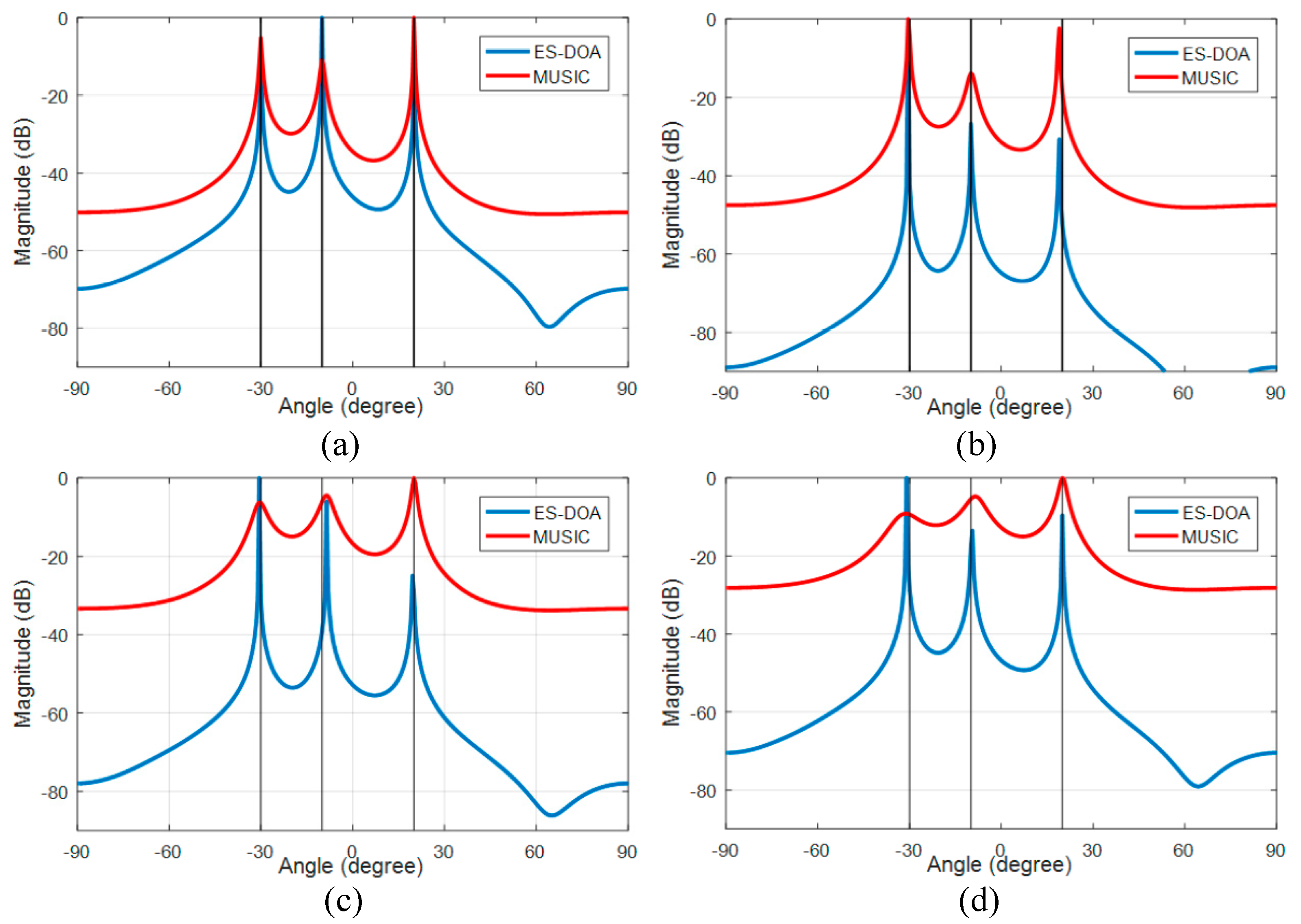
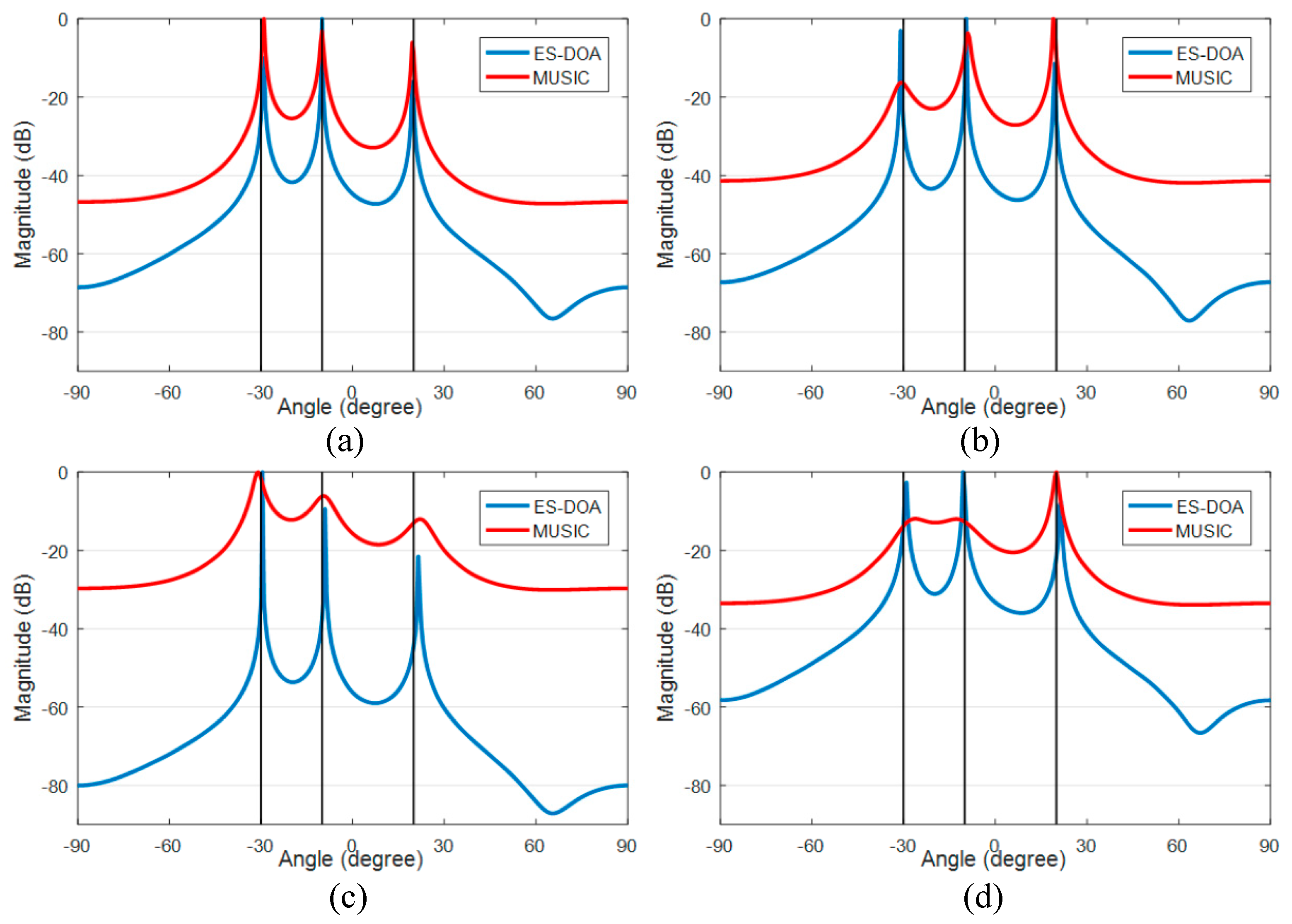
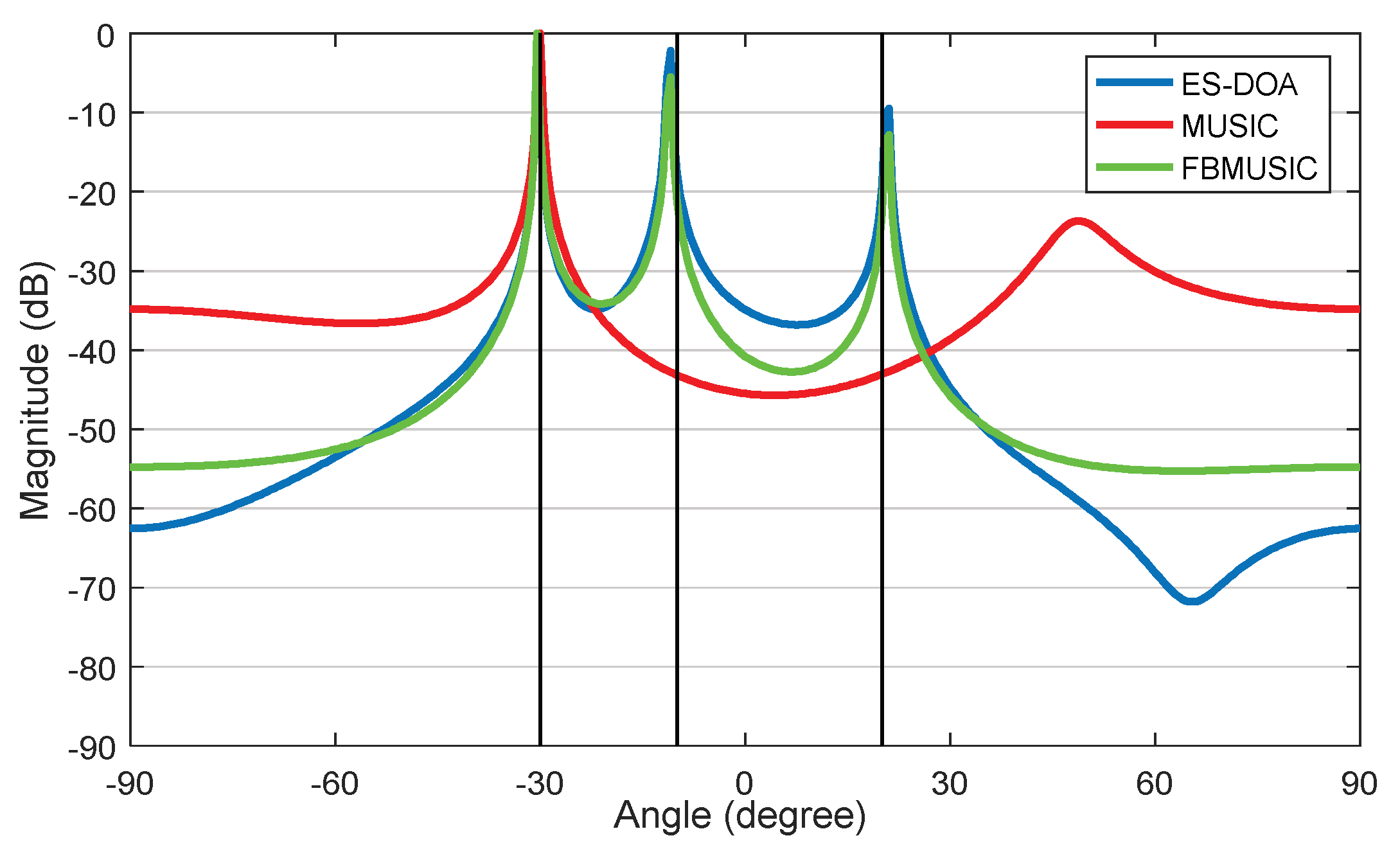
3.2. DOA Estimation Performance
3.2.1. Uncorrelated Source Signal Case
3.2.2. Coherent Source Signal Case
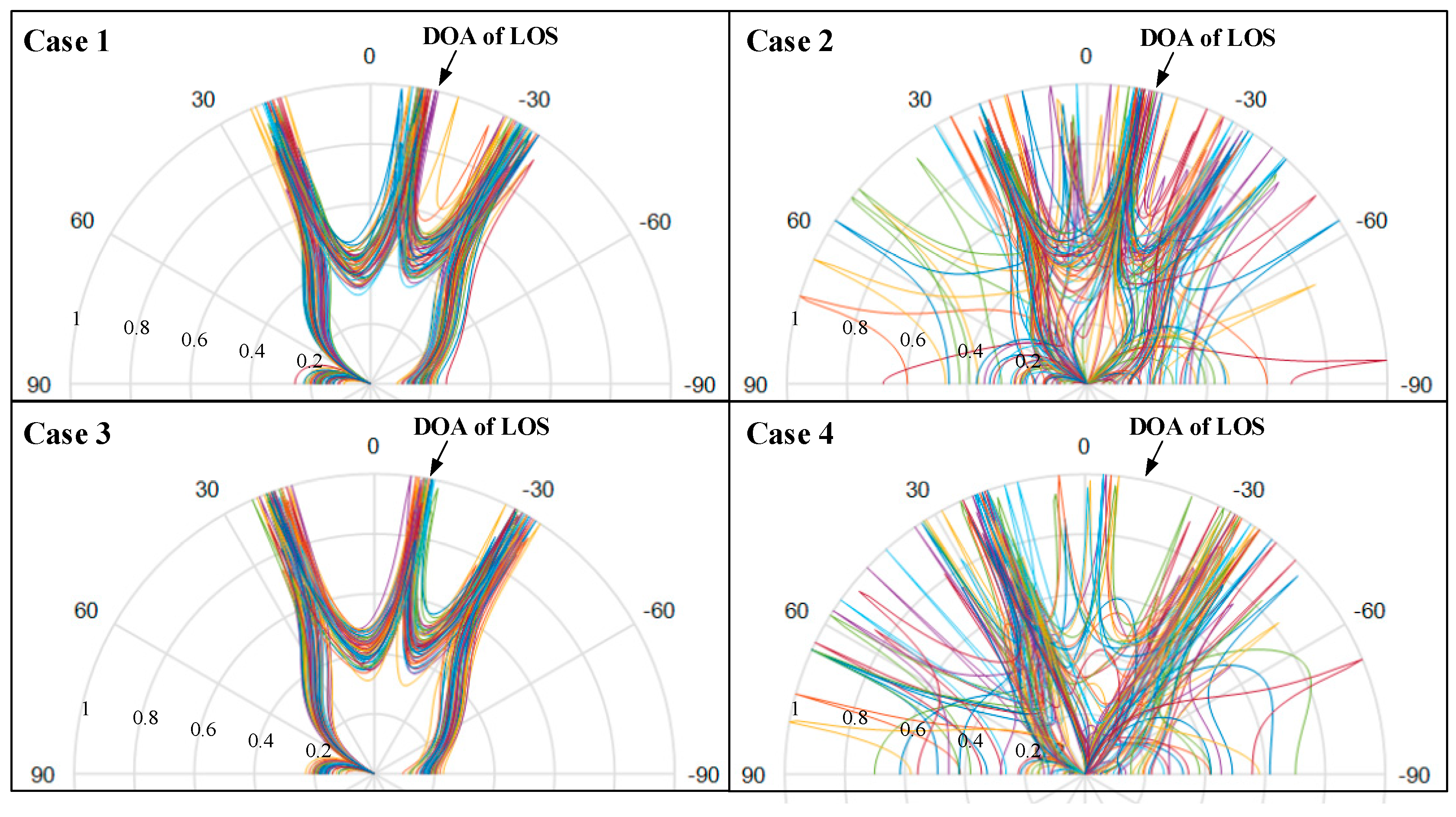
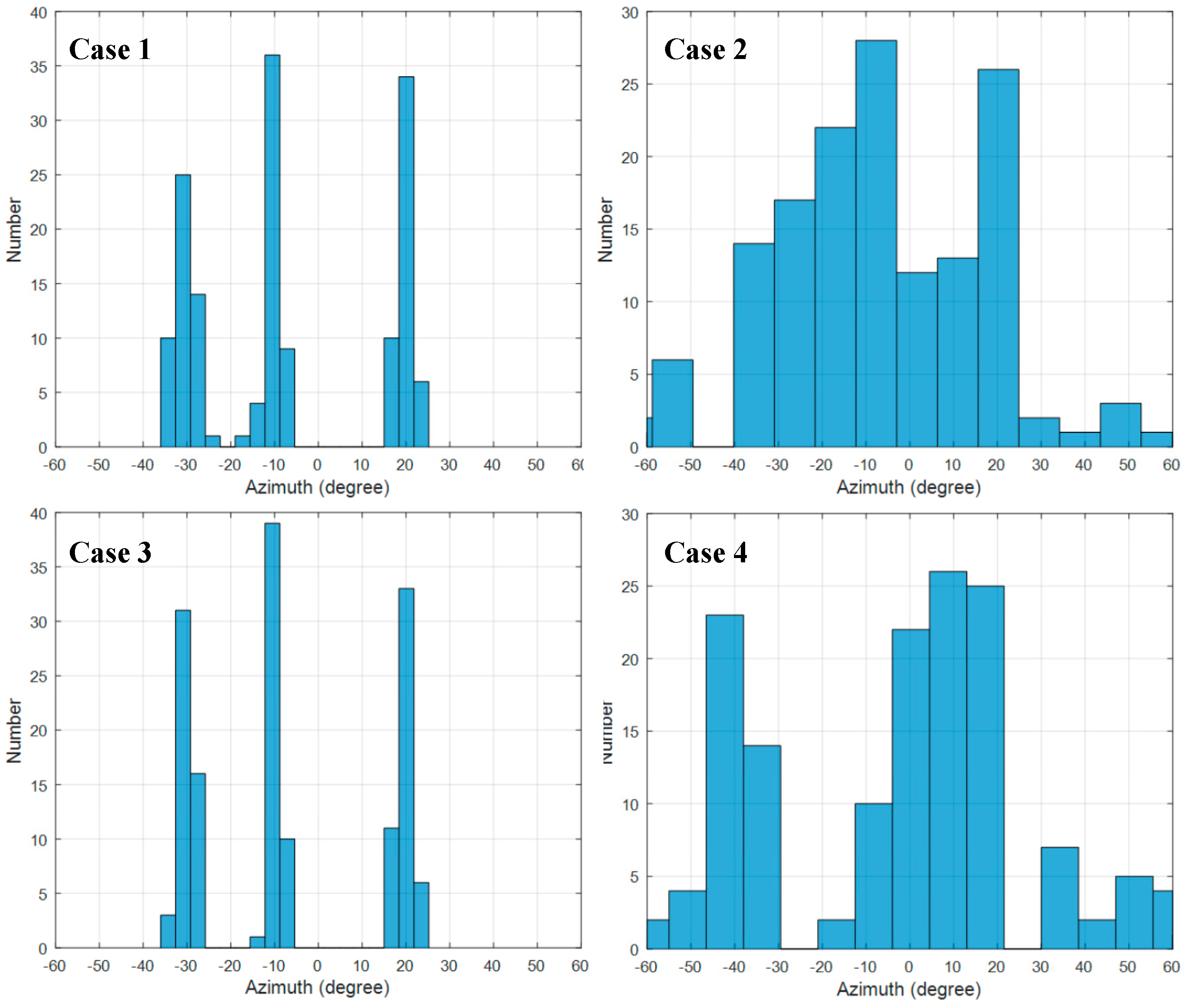
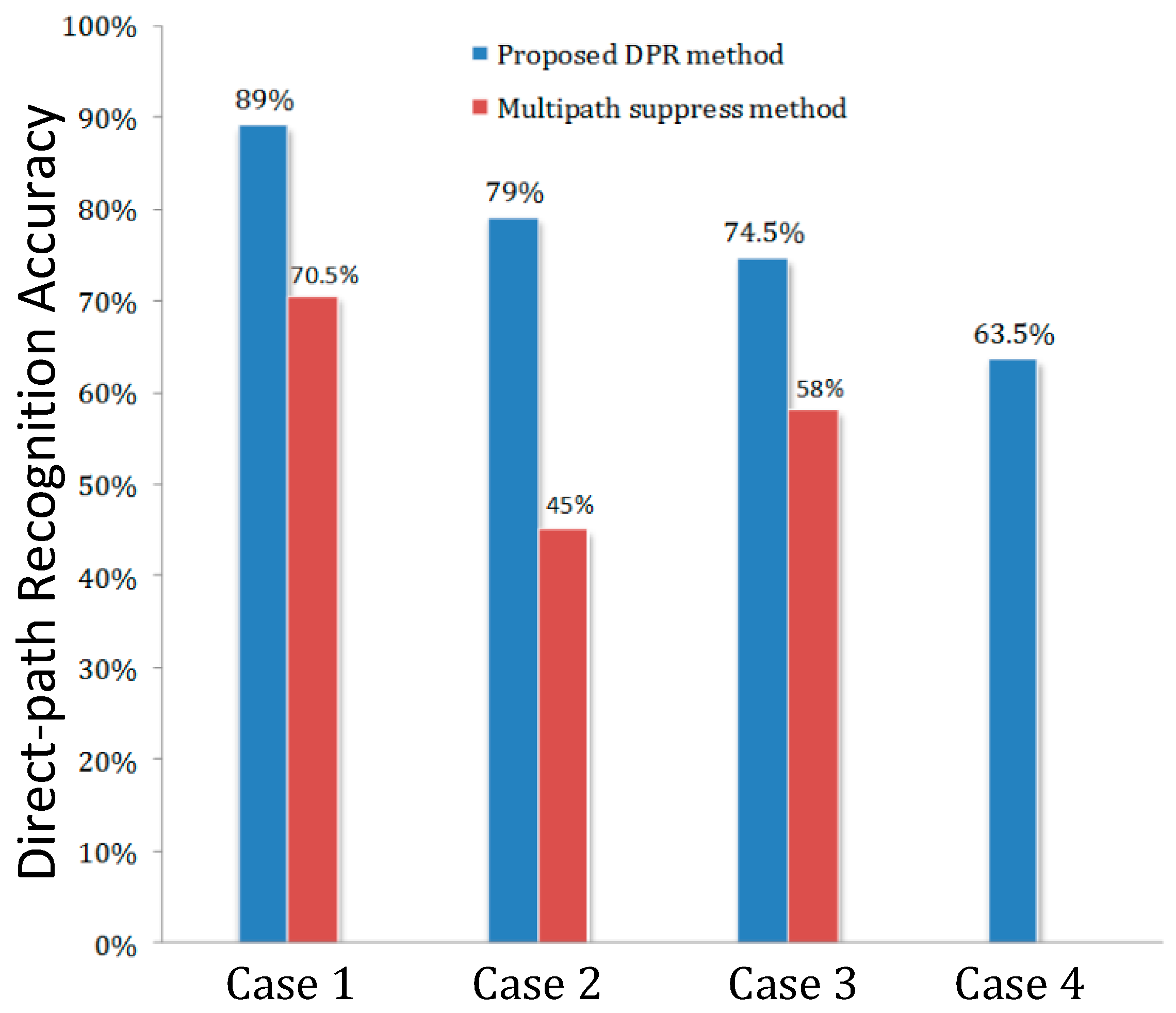
3.3. Direct-Path Identification Method
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gu, Y.; Lo, A.; Niemegeers, I. A Survey of Indoor Positioning Systems for Wireless Personal Networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Ahmed, A.-D.; Ran, L.; Chau, Y.; Ronald, R.; Elias, A. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An In-Building RF-Based User Location and Tracking System. In Proceedings of the IEEE Infocom, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No.00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Youssef, M.; Agrawala, A. The Horus WLAN Location Determination System. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, New York, NY, USA, 6–8 June 2005; pp. 205–218. [Google Scholar]
- Brunato, M.; Battiti, R. Statistical learning theory for location fingerprinting in wireless LANs. Comput. Netw. 2005, 47, 825–845. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2017, 18, 466–490. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, J. GROF: Indoor Localization Using a Multiple-Bandwidth General Regression Neural Network and Outlier Filter. Sensors 2018, 18, 3723. [Google Scholar] [CrossRef] [PubMed]
- Guvenc, I. A survey on TOA based wireless localization and NLOS mitigation techniques. IEEE Commun. Surv. Tutor. 2009, 11, 107–124. [Google Scholar] [CrossRef]
- Keunecke, K.; Scholl, G. Deriving 2d Toa/Tdoa IEEE 802.11 g/n/ac Location Accuracy from an Experimentally Verified Fading Channel Model. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–10. [Google Scholar]
- Vasishty, D.; Kumar, S.; Katabi, D. Decimeter-Level Localization with a Single WiFi Access Point. In Proceedings of the USENIX Symposium on Networked Systems Design and Implementation, Santa Clara, CA, USA, 16–18 March 2016; pp. 165–178. [Google Scholar]
- Yang, C.; Shao, H.R. WiFi-based indoor positioning. Commun. Mag. IEEE 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Exel, R.; Gaderer, G.; Loschmidt, P. Localisation of Wireless LAN Nodes Using Accurate TDoA Measurements. In Proceedings of the Wireless Communications & Networking Conference, Sydney, NSW, Australia, 18–21 April 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–6. [Google Scholar]
- Xie, T.; Zhang, C.; Li, Y.; Jiang, H.; Wang, Z. An Enhanced TDoA Approach Handling Multipath Interference in Wi-Fi Based Indoor Localization Systems. In Proceedings of the 60th International Midwest Symposium on Circuits and Systems, Boston, MA, USA, 6–9 August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 160–163. [Google Scholar]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. SpotFi: Decimeter Level Localization Using WiFi. In Proceedings of the ACM, Stanford, CA, USA, 17–24 August 2015; pp. 269–282. [Google Scholar]
- Xiong, J.; Jamieson, K. ArrayTrack: A Fine-Grained Indoor Location System. In Proceedings of the USENIX Symposium on Networked Systems Design and Implementation, Berkeley, CA, USA, 2–5 April 2013; pp. 71–84. [Google Scholar]
- Schmidt, R.; Schmidt, R.O. Multiple Emitter Location and Signal Parameters Estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Proc. 2002, 37, 984–995. [Google Scholar] [CrossRef]
- Shan, T.J.; Wax, M.; Kailath, T. On spatial smoothing for direction-of-arrival estimation of coherent signals. IEEE Trans. Acoust. Speech Signal Proc. 1985, 33, 806–811. [Google Scholar] [CrossRef]
- Pillai, S.U.; Kwon, B.H. Forward/backward spatial smoothing techniques for coherent signal identification. IEEE Trans. Acoust. Speech Signal Proc. 1989, 37, 8–15. [Google Scholar] [CrossRef] [Green Version]
- Trees, H.L.V. Optimum Array Processing: Part IV of Detection, Estimation and Modulation Theory; John Wiley & Sons: New York, NY, USA, 2002. [Google Scholar]
- Haykin, S.; Justice, J.H.; Owsley, N.L.; Yen, J.L.; Kak, A.C. Array Signal Processing. In Proceedings of the IEEE Signal Processing Workshop on Higher-order Statistics, Banff, AB, Canada, 21–23 July 1997; IEEE Computer Society: Washington, DC, USA, 1997. [Google Scholar]
- Zhang, X.; Lv, W.; Shi, Y.; Zhao, R.; Xu, D. A Novel DOA Estimation Algorithm Based on Eigen Space. In Proceedings of the International Symposium on Microwave, Hangzhou, China, 16–17 August 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 551–554. [Google Scholar]
- Yu, K.; Guo, Y.J. Statistical NLOS Identification Based on AOA, TOA, and Signal Strength. IEEE Trans. Veh. Technol. 2009, 58, 274–286. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. Ensemble Learning. In The Elements of Statistical Learning; Springer: New York, NY, USA, 2009. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning (Information Science and Statistics); Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Stijn, W.; Lieven, S. Indoor Multipath Assisted Angle of Arrival Localization. Sensors 2017, 17, 2522. [Google Scholar] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P1 | P3 | |
|---|---|---|
| 60° | 70° | |
| 0.27 | 0.39 | |
| 11.4 dB | 8.1 dB |
| DOA | |||
|---|---|---|---|
| Case 1 | −10° | −10.6° | −10.2° |
| Case 2 | −10° (−12 dB)3 | −11.2° | −10.7° |
| Case 3 | −10° | 19.6° | −10.4° |
| Case 4 | NLOS | 22.3° | No direct path |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Wang, J. ES-DPR: A DOA-Based Method for Passive Localization in Indoor Environments. Sensors 2019, 19, 2482. https://doi.org/10.3390/s19112482
Chen Z, Wang J. ES-DPR: A DOA-Based Method for Passive Localization in Indoor Environments. Sensors. 2019; 19(11):2482. https://doi.org/10.3390/s19112482
Chicago/Turabian StyleChen, Zhang, and Jinlong Wang. 2019. "ES-DPR: A DOA-Based Method for Passive Localization in Indoor Environments" Sensors 19, no. 11: 2482. https://doi.org/10.3390/s19112482
APA StyleChen, Z., & Wang, J. (2019). ES-DPR: A DOA-Based Method for Passive Localization in Indoor Environments. Sensors, 19(11), 2482. https://doi.org/10.3390/s19112482