Design and Evaluation of Sensor Housing for Boundary Layer Profiling Using Multirotors


Abstract
:1. Introduction
2. Materials and Methods
2.1. Design Requirements
- Aspirating Sensors: Naturally aspirated sensors are prone to radiative heating error [29]. The aspiration airspeed also affects the effective sensor response times [20]. Insufficient and inconsistent aspiration speeds introduce uncertainty in the measurement that could be impossible to deal with during quality checks/correction of the data. Sensor manufacturers often specify the sensor response time in the presence of a constant airflow. For instance, a nominal 5 m/s airflow is used for the response time of 1 s for iMet sensors (Table 2). However, when mounted on a system, the response time of the system could change based on the aspiration method and should be determined as flown [30].
- Shielding from Heat Sources: The sensors need to be protected from solar radiation and other heat sources such as the waste heat produced by the battery and motors and absorbed heat from solar radiation by the body of the UAS. Failure to do so will result in biased measurements, which can worsen the longer a UAS-mounted sensor is airborne. Having a sufficiently aspirated housing and proper placement of the sensor will reduce/eliminate the effect of these biases.
- Preventing Artificial Wet-Bulbing: The sensor housing needs to shield the sensor from precipitation and should not allow water to accumulate on the sensors. The accumulation of liquid water on the sensor can produce incorrect measurements of the temperature by the wet-bulbing effect. If the humidity sensor package is dependent on the temperature sensor for corrections, this will also skew the humidity measurements by an undesired saturation.
- Payload Capacity: The sensor housing and its mounting fixtures must not exceed the rated payload capacity of the aircraft. A higher payload weight also reduces the total flight time, thereby limiting the type of mission the UAS will be capable of performing.
- Flight Dynamics: The housing must not prevent the UAS from doing its normal maneuvers and must remain in safe operating conditions. Adding the sensor housing must not severely disrupt the balance of the UAS.
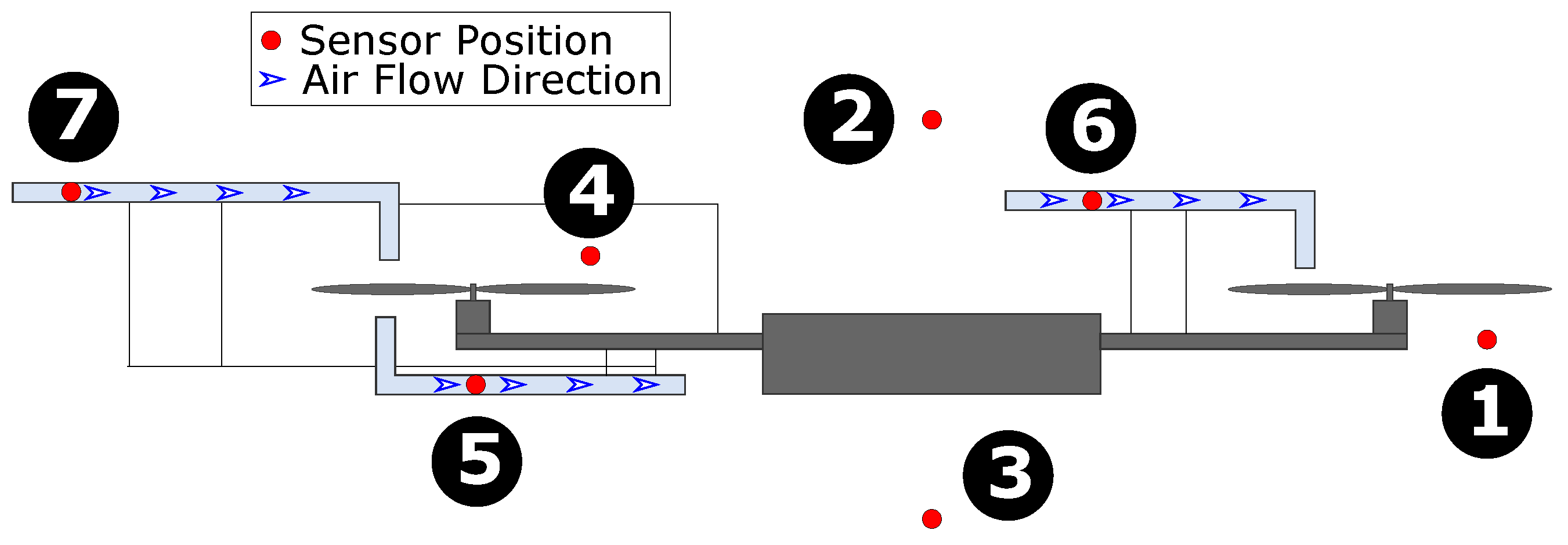
2.2. Evaluation of Sensor Placement Configurations on the UAS
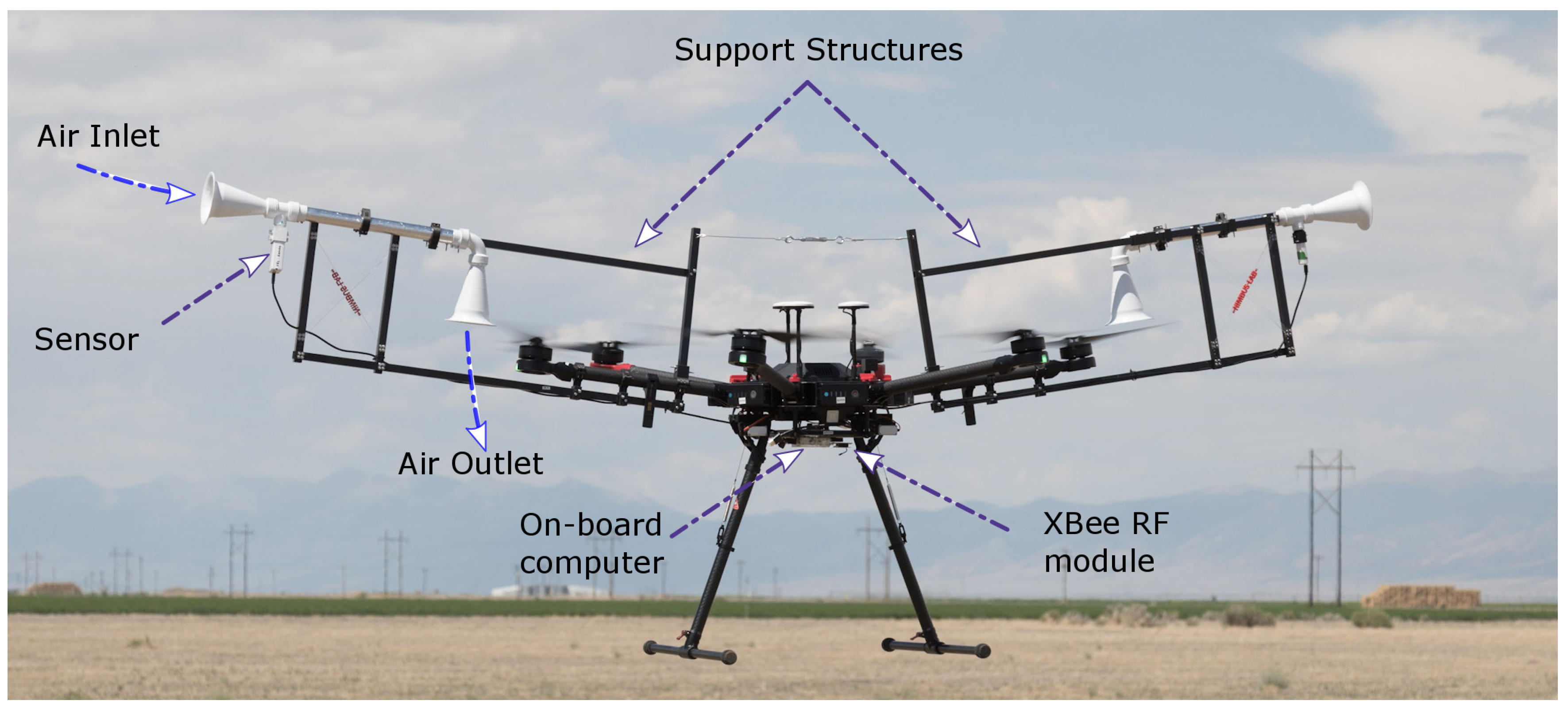
2.3. System Description
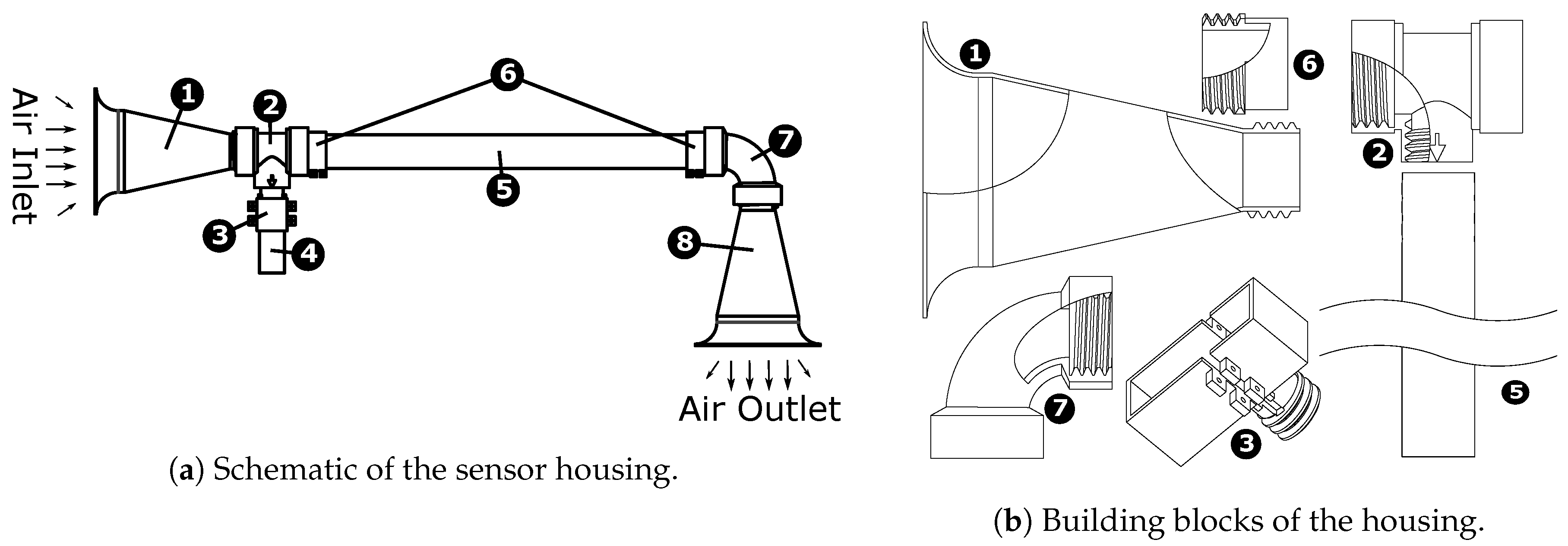
2.4. Sensor Housing
- Inlet/Outlet: The Inlet/Outlet of the sensor housing is designed to have a high cross-sectional area at the end of the inlet/outlet to maximize the airflow volume rate for a given pressure difference (low pressure on top of the propeller vs atmospheric pressure outside the UAS body). The reducer-expander strategy (funnel shape) allows the low-speed flow at the intake to flow at a higher speed proportional to the reduction of the cross-sectional area according to the continuity equation, . The curved-horn shape of the part creates a smooth transition from a high cross-sectional area at the intake to the narrow cross section of the carbon-fiber tube which ensures laminar flow throughout the housing. The radius, r, of this curvature and gradient of this curve are chosen to minimize the loss of airflow and to maximize the flow velocity inside the tube. For the housing used in the paper inlet/outlet transitions from a diameter of 104 mm to 26 mm to match the carbon fiber tube, this reduction in diameter corresponds to a 16× increase in the speed from the inlet through the carbon-fiber tube.
- Carbon-Fiber Tube Adapter: This adapter adds on to the standard carbon-fiber tube to make them compatible with the mechanical screw-in threads of the other parts.
- L-bend: L-bends transition the flow in a perpendicular direction, allowing the safe extension of the sensor housing outwards parallel to the UAS arm while still using the propeller for air drawing. The curvature of the L-bend is minimized to reduce the flow loss due to the change of direction.
- Sensor Holder Adapter: This adapter is molded to fit on the sensor of interest. Due to mechanical screw-in threads, any sensor with an appropriate sensor adapter will be compatible with the housing. The sensor adapter, as shown in Figure 4b, is designed for iMet XQ2. Most of the sensors have strict storage requirements due to moisture affecting the quality of the sensor. Since the adapter is very easy to attach to the main housing, it can be plugged-in right before the UAS mission, keeping the sensor safe in storage otherwise. This adapter-type design choice allows several different sensor designs to be compatible without modifying the rest of the housing.
- Housing-Sensor Holder Coupler: This part provides an attachment point for the sensor adapter to attach into the housing. A sensor plugged into this adapter will be inside the tube aspirated by laminar airflow. Due to the modular design, multiple of these part can be connected in series to have an equal number of sensors taking a reading at the same time from the same sampling airflow.
- Carbon-fiber tube: The carbon-fiber tube diameter is critically the most important dimension, as it is the primary determinant of how much airflow is achievable through the tube and consequently drives the dimension of all the other parts. The Hagen–Poiseuille equation [37] dictates that the volume flow rate through a tube is quadratically proportional to its radius which means that for the same pressure difference and length of the tube, reducing the radius by half will reduce the volume flow rate to 1/16th the original. The diameter of the tube also needs to be big enough to allow the sensors to be in the center of the tube with sufficient area around it to promote good airflow. The diameter of the carbon fiber tube used in the paper is 26 mm.
2.5. Experimental Methods
- EXP 1
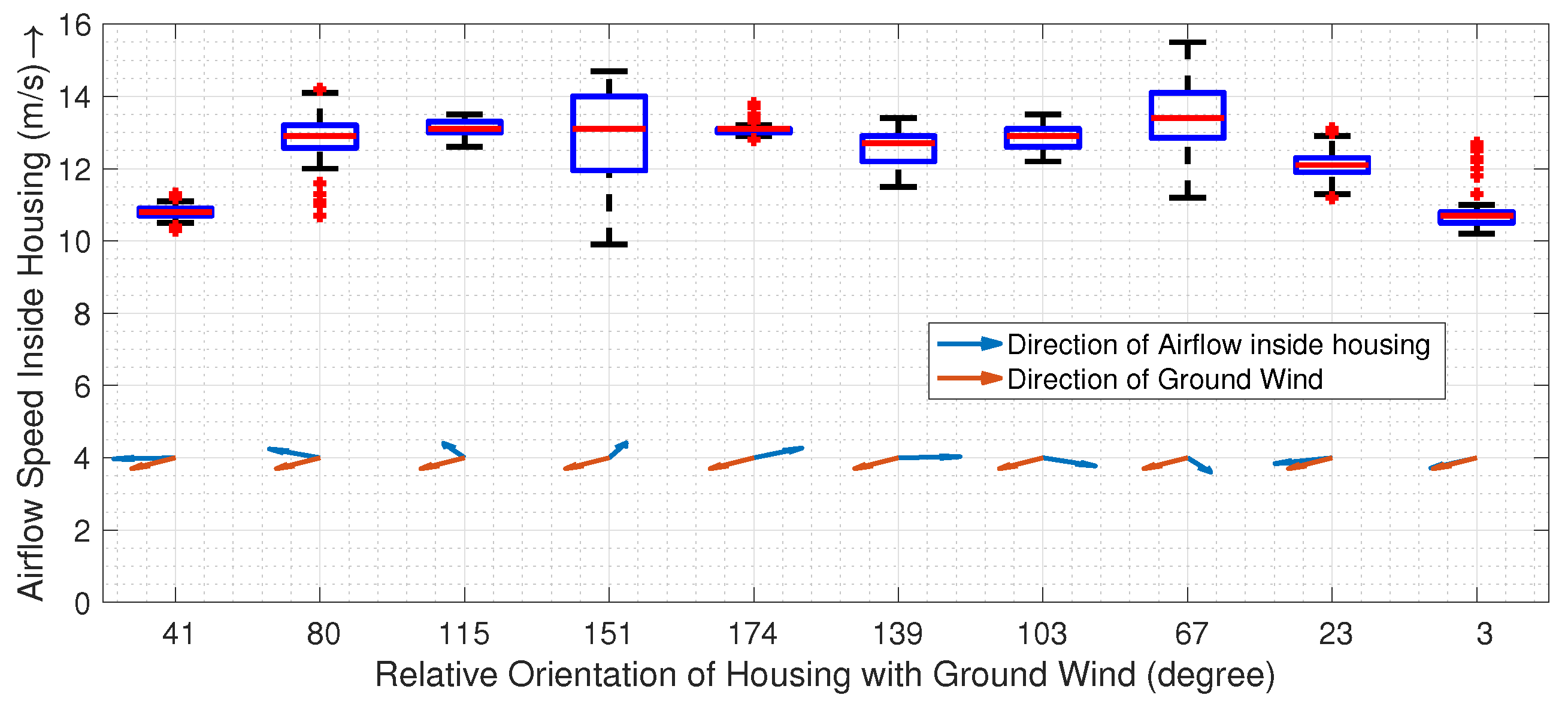
- Airflow Inside the Housing: During a field test, the airflow speed inside the housing is measured using a hot-wire anemometer (Extech SDL 350, FLIR Commercial Systems Inc., Nashua, NH, USA) to establish the consistency of the flow speed and its directional dependence on ambient wind. We conduct ten vertical profiles at the same location within 13 minutes with successive 36 changes in the orientation of the UAS between each ascent or descent. An analysis of this data would establish that the housing provides sufficient aspirations at all times, irrespective of the UAS altitude and relative orientation of the housing with atmospheric wind.
- EXP 2
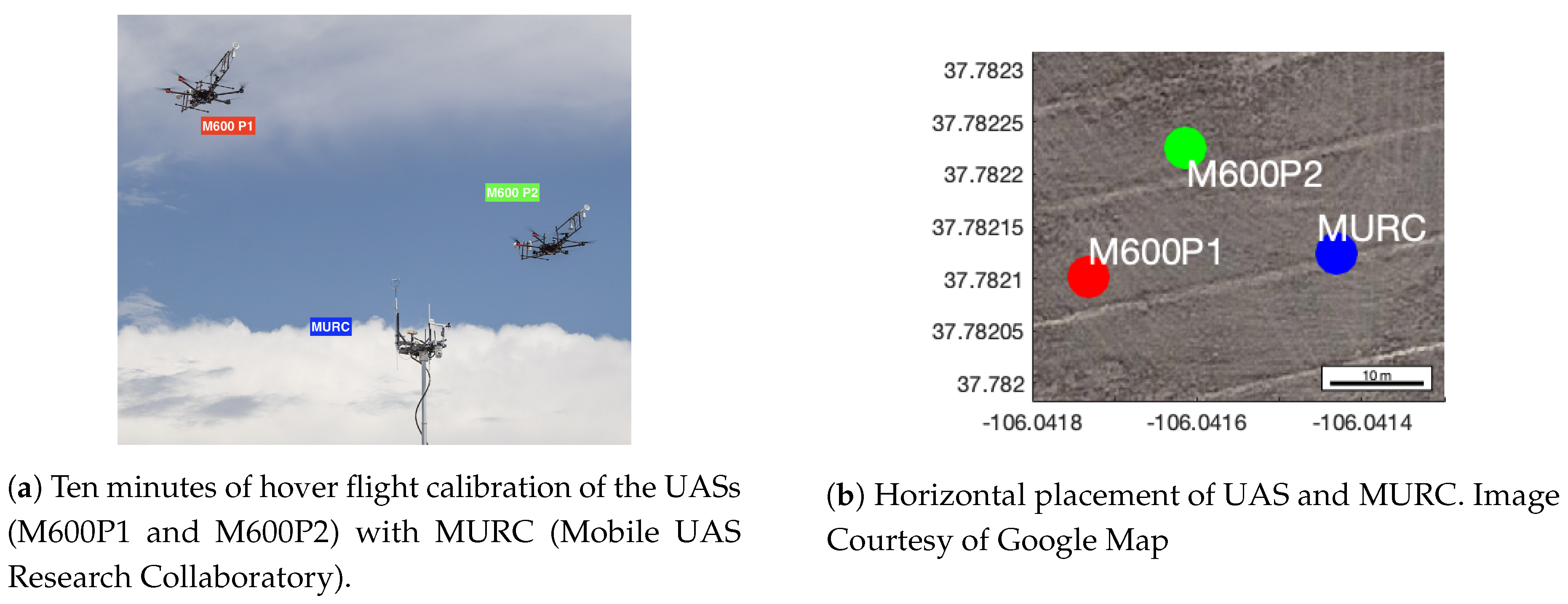
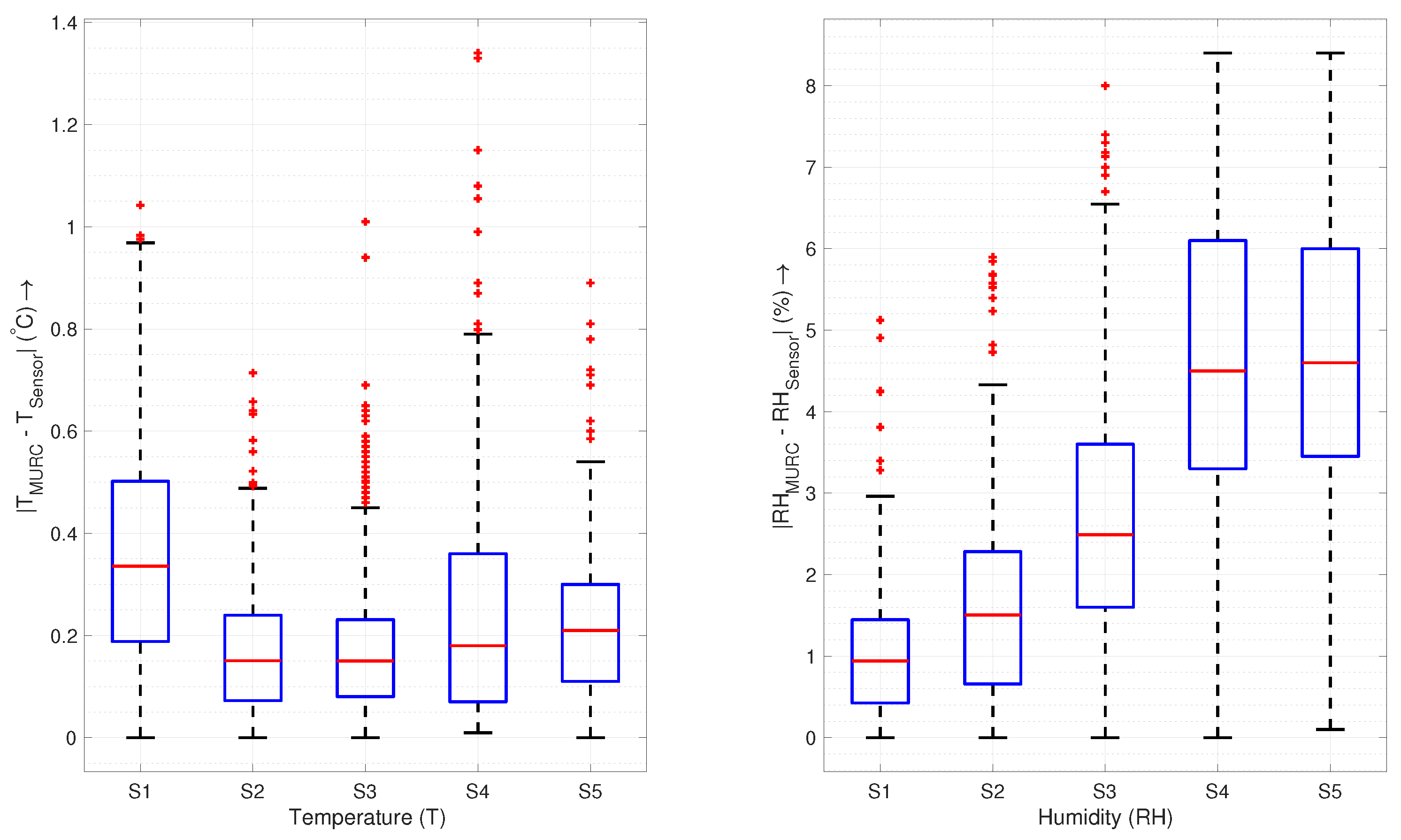
- MURC Tower Calibration: Through the LAPSE-RATE field campaign, we compare our data against the ground-truth data obtained from the MURC tower, as shown in Figure 5. We perform these experiments to investigate (1) how accurately a sensor inside the housing captures the measurements in-flight when compared with the ground-truth and (2) whether the sensor is affected by external heat/radiation, resulting in measurement drifts.We use a similar flight pattern for both UASs (M600P1 and M600P2) by having the UAS climb up to the MURC tower altitude of m and hover for 10 min. We also assume that the atmospheric parameters do not change within the horizontal distance of MURC and the UAS as shown in Figure 5b.
- EXP 3
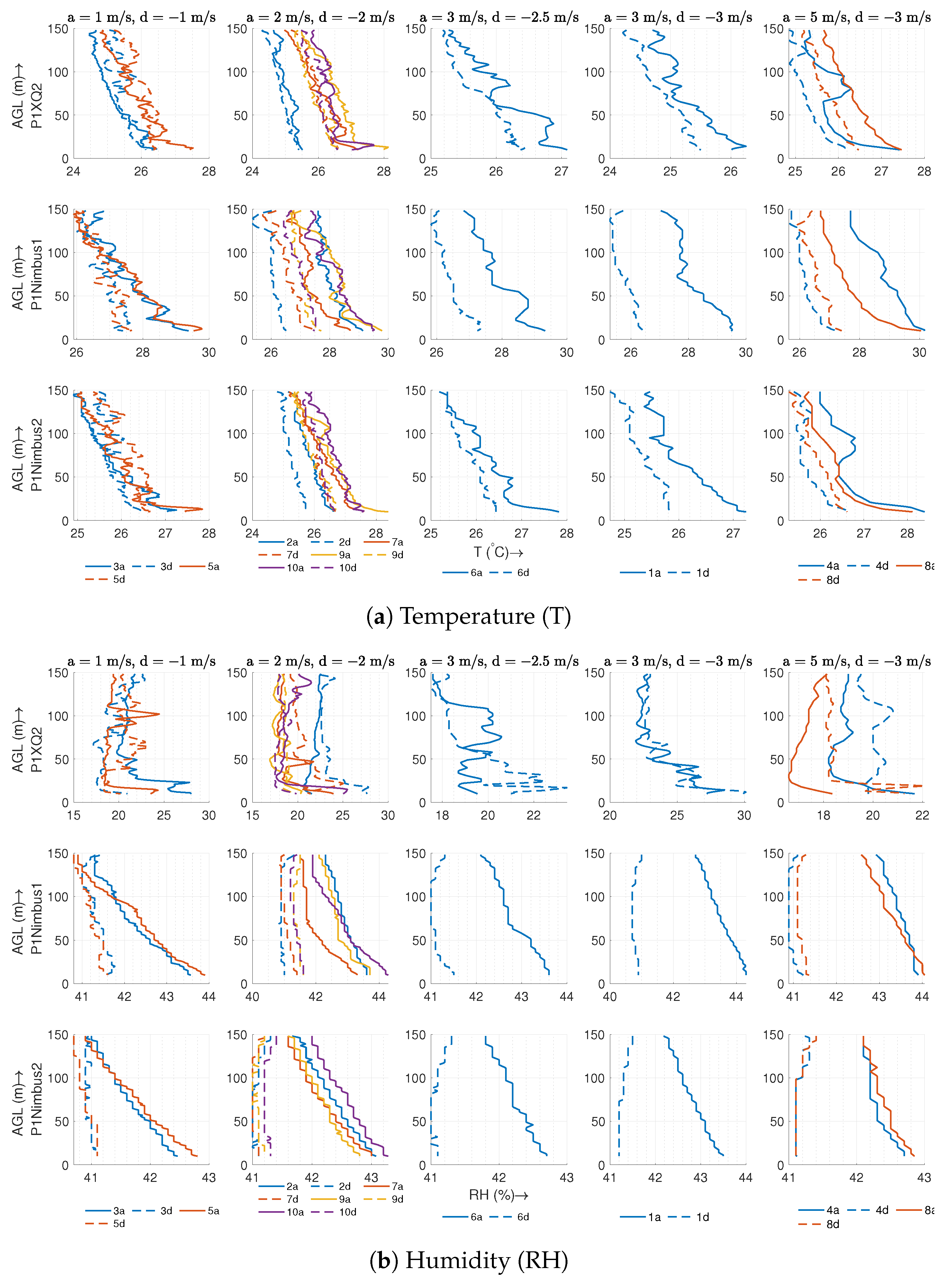
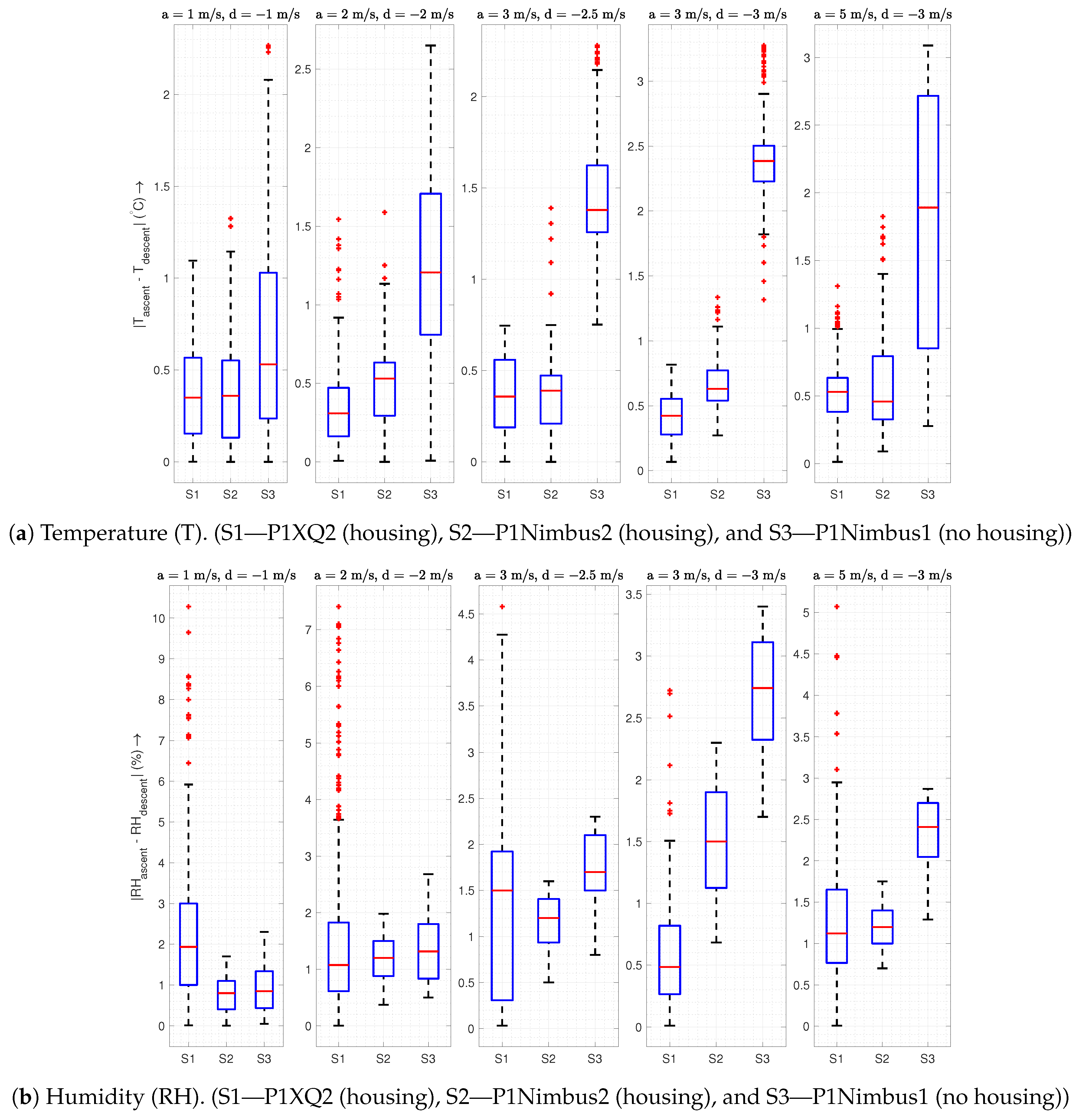
- Comparison of Flights at Different Vertical Speeds: Due to the dynamic response characteristic and sensor response time, measurements made during ascent and descent at the same AGL altitude are expected to have a difference. This difference is proportional to the sensor response time and aspiration airspeed [20]. Since the housing is expected to maintain sufficient airspeed over the sensors at all times, the impact of the UAS vertical speed on the sensor response time should be negligible. Some recirculation of air from underneath the propeller is expected during hover or slow ascent/descent speeds. If the housing samples from the recirculated air, it will result in a measurement error or in a reduction of feature details in the observation. As such, we hypothesize that the housing would allow missions with faster ascending speeds, reducing the flight duration for similar altitude profiles. We test this hypothesis over ten flights with different ascent and descent speeds and compare the absolute error between the ascent and descent measurements. The UAS used in our experiments is limited to a maximum vertical speed of 5 m/s during ascent and 3 m/s during descent.
- EXP 4
- Inversion Layer Tests: We conduct the inversion layer tests to investigate whether the sensor is exposed to mixed and turbulent airflow of the UAS. Well-mixed air will not exhibit an inversion layer. If the UAS fly through an inversion layer and the TH sensor samples from the UAS mixed air, it will not be able to detect it. Hence, if a sensor inside the housing can detect an inversion at the true altitude, it will validate that the housing is not sampling from mixed air. Additionally, if there is an issue with aspiration, this will also make it harder to identify inversion. We perform the flights through an inversion layer (ground truth established using balloon radiosondes) at different ascent and descent speeds. We also conduct horizontal transects (at an altitude of 50 m) to investigate if the sensor readings are consistent when the sensor is in the wake of the UAS.
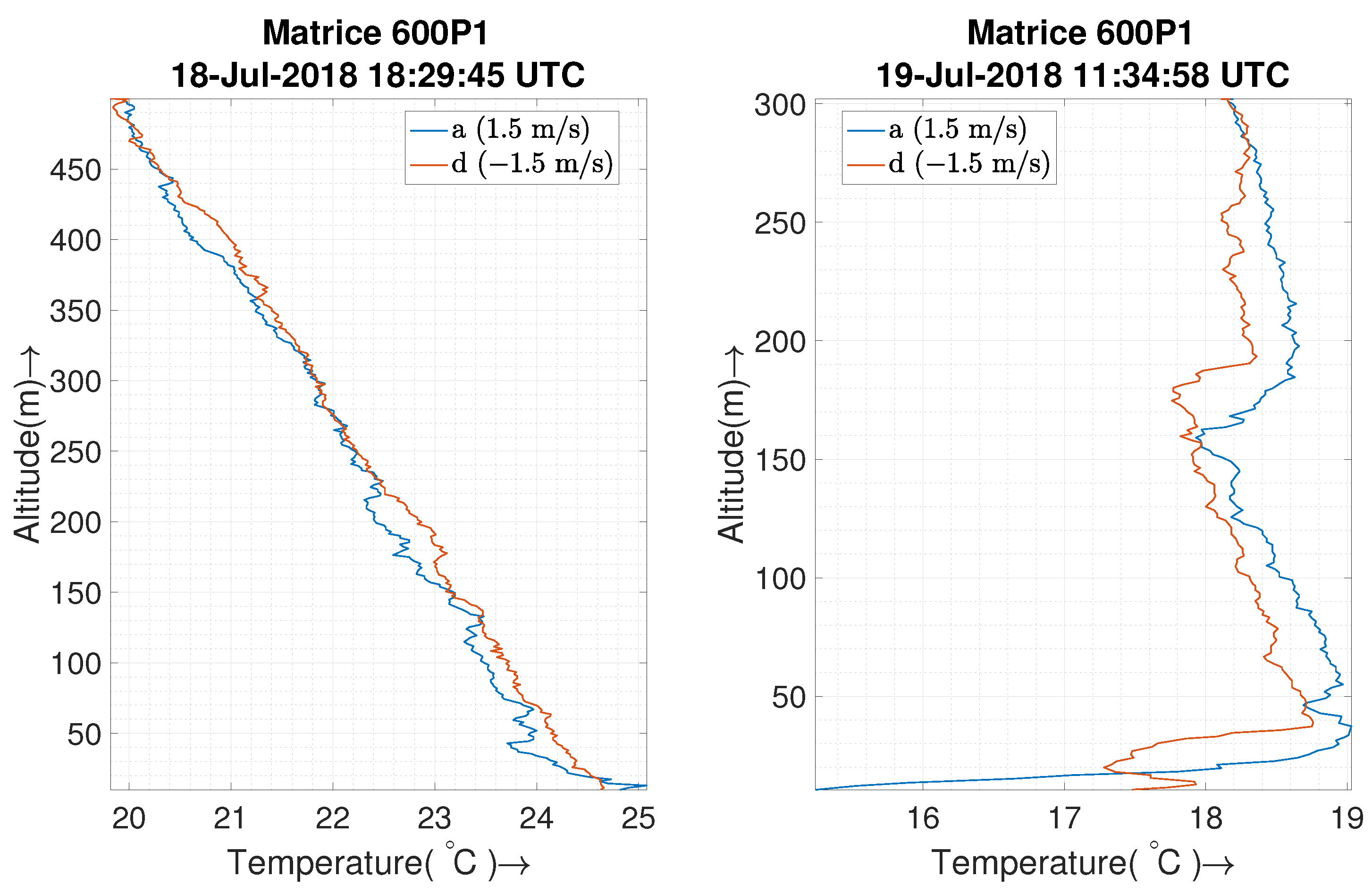
- Vertical Profiles: We perform six flights at different ascent and descent speeds. We place the sensors in upstream (the sensor is mounted on the end directly facing the wind) of the UAS M600P1 and downstream (the sensor is mounted on the end facing away from the wind) of the UAS M600P2. Identification of the inversion layer with these profiles establishes whether the housing is sampling from the UAS’s disturbed airflow, the effect of the orientation of the UAS relative to the wind, and the presence of aspiration issues. Flights are also performed at different speeds to establish the effect on the sensor measurements.
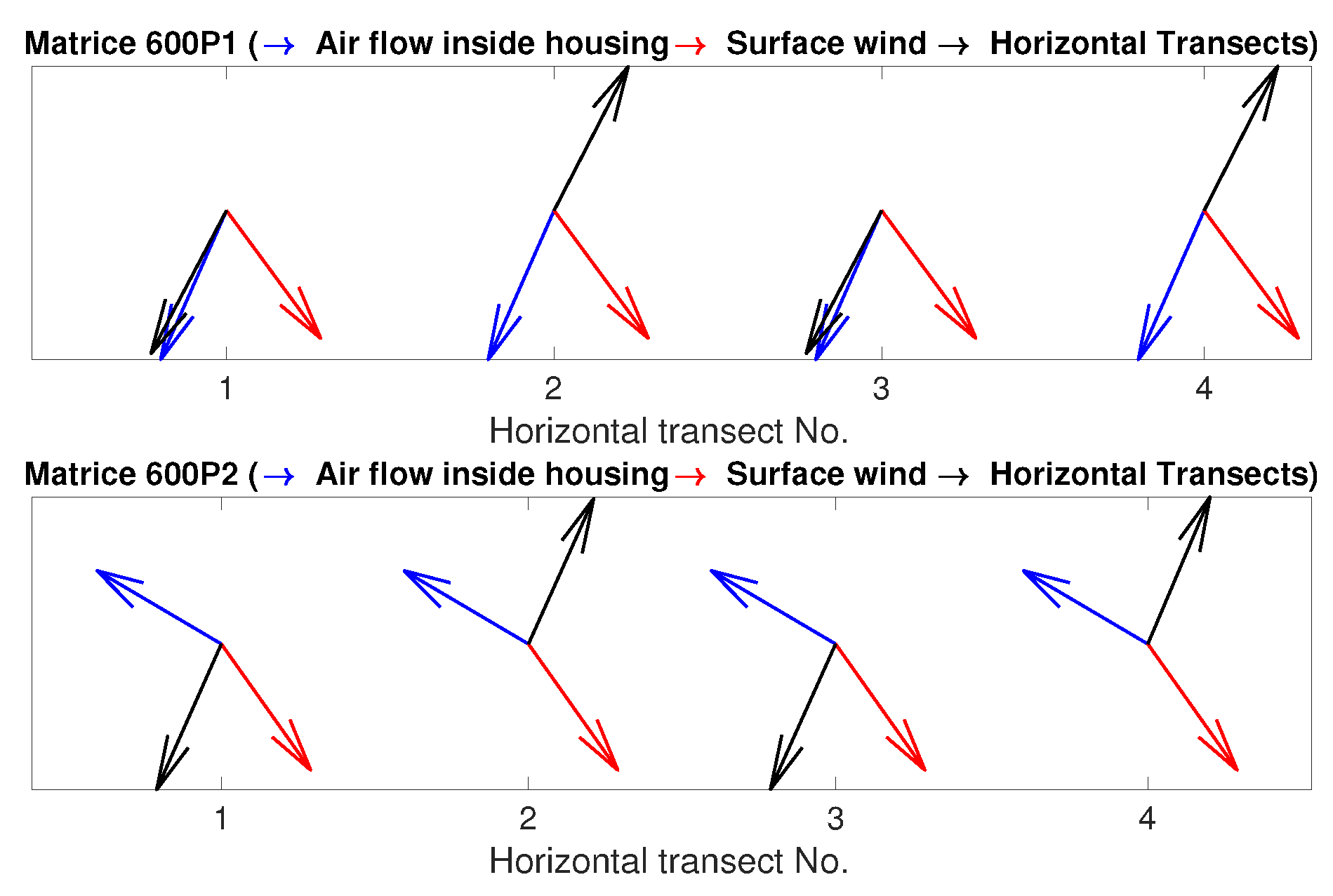
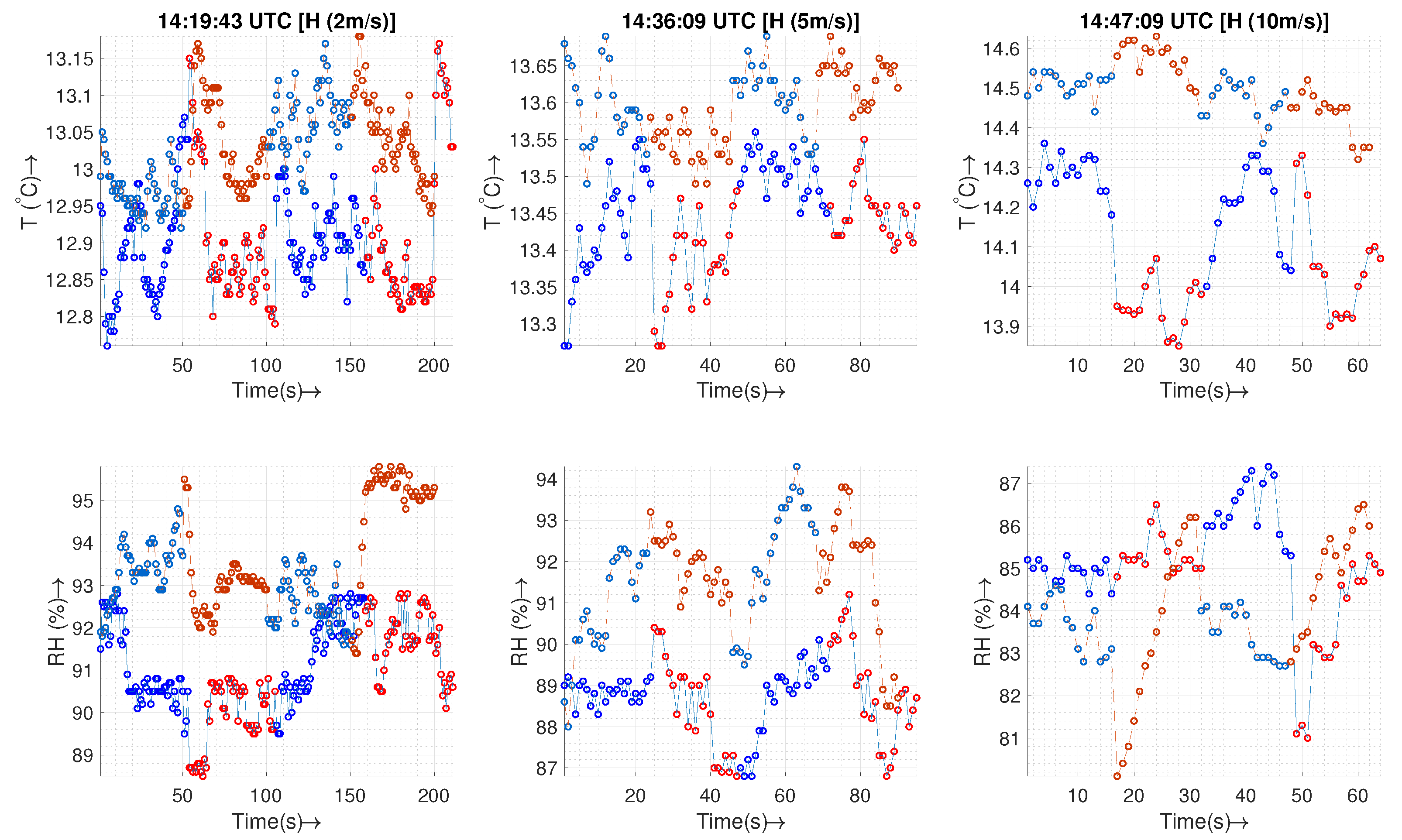
- Horizontal Profiles: These experiments investigate the effect of ambient wind and the UAS’s relative orientation on the sensor measurements, especially for horizontal profiles. Our experiments were conducted such that the sensor is exposed either upstream (sensor on the leading front of the UAS) or downstream (sensor mounted on the trailing end of the UAS motion).
- Comparison with Radio-Sonde Balloon: We use two radiosonde balloons launched one hour apart as our source of ground truth for the inversion profiles. The release of the first balloon coincides with the first vertical profile, while the second balloon is launched at the start of the horizontal profiles. We use the data from the radiosonde for a comparison against the ascend data recorded by the UAS to assess how well it captures an inversion.
3. Results
3.1. (EXP 1) Airflow inside the Housing
3.2. (EXP 2) MURC Tower Calibration
3.3. (EXP 3) Comparison of Flights at Different Vertical Speeds
3.4. (EXP 4) Inversion Layer Tests
4. Discussion
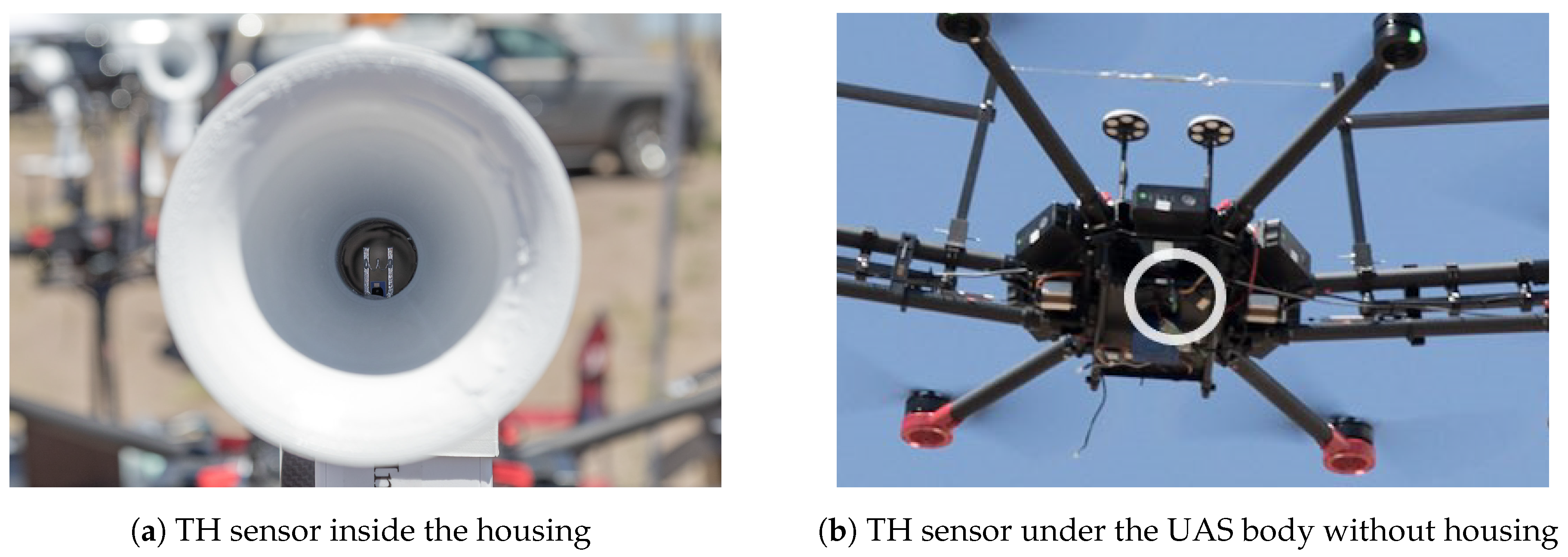
4.1. Housing vs. No Housing
4.2. Effect of UAS Orientation on the Housing
4.3. Effect of Housing on the UAS
4.4. UAS Ranges of Operation
4.5. Limitations and Future Work
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ABL | Atmospheric Boundary Layer |
| UAS | Unmanned Aerial System |
| MDT | Mountain Day Time (UTC-6) |
| AGL | (Height) Above Ground Level |
| MURC | Mobile UAS Research Collaboratory |
| LAPSE-RATE | Lower Atmospheric Process Studies at Elevation - a Remotely-piloted Aircraft Team Experiment |
| CLOUD-MAP | Collaboration Leading Operational Unmanned aircraft Development for Meteorology and Atmospheric Physics |
| GPS | Global Positioning System |
| ROS | Robot Operating System |
| CoA | Certificate of Authorization |
| DAQ | Data Acquisition |
| TH | Temperature and Humidity |
| NOAA | National Oceanic and Atmospheric Administration |
| FAA | Federal Aviation Administration |
References
- Holtslag, A.; De Bruijn, E.; Pan, H. A high resolution air mass transformation model for short-range weather forecasting. Mon. Weather Rev. 1990, 118, 1561–1575. [Google Scholar] [CrossRef]
- Seibert, P.; Beyrich, F.; Gryning, S.E.; Joffre, S.; Rasmussen, A.; Tercier, P. Review and intercomparison of operational methods for the determination of the mixing height. Atmos. Environ. 2000, 34, 1001–1027. [Google Scholar] [CrossRef]
- Hock, T.F.; Franklin, J.L. The ncar gps dropwindsonde. Bull. Am. Meteorol. Soc. 1999, 80, 407–420. [Google Scholar] [CrossRef]
- Elston, J.; Argrow, B.; Stachura, M.; Weibel, D.; Lawrence, D.; Pope, D. Overview of small fixed-wing unmanned aircraft for meteorological sampling. J. Atmos. Ocean. Technol. 2015, 32, 97–115. [Google Scholar] [CrossRef]
- Bonin, T.; Chilson, P.; Zielke, B.; Fedorovich, E. Observations of the early evening boundary-layer transition using a small unmanned aerial system. Bound. Layer Meteorol. 2013, 146, 119–132. [Google Scholar] [CrossRef]
- Houston, A.L.; Argrow, B.; Elston, J.; Lahowetz, J.; Frew, E.W.; Kennedy, P.C. The collaborative Colorado–Nebraska unmanned aircraft system experiment. Bull. Am. Meteorol. Soc. 2012, 93, 39–54. [Google Scholar] [CrossRef]
- Jonassen, M.O.; Tisler, P.; Altstädter, B.; Scholtz, A.; Vihma, T.; Lampert, A.; König-Langlo, G.; Lüpkes, C. Application of remotely piloted aircraft systems in observing the atmospheric boundary layer over Antarctic sea ice in winter. Pol. Res. 2015, 34, 25651. [Google Scholar] [CrossRef]
- Buban, M.S.; Lee, T.R.; Dumas, E.J.; Baker, C.B.; Heuer, M. Observations and Numerical Simulation of the Effects of the 21 August 2017 North American Total Solar Eclipse on Surface Conditions and Atmospheric Boundary-Layer Evolution. Bound. Layer Meteorol. 2019, 171, 257–270. [Google Scholar] [CrossRef]
- Greatwood, C.; Richardson, T.; Freer, J.; Thomas, R.; MacKenzie, A.; Brownlow, R.; Lowry, D.; Fisher, R.; Nisbet, E. Atmospheric sampling on ascension island using multirotor UAVs. Sensors 2017, 17, 1189. [Google Scholar] [CrossRef]
- Prudden, S.; Fisher, A.; Mohamed, A.; Watkins, S. A flying anemometer quadrotor: Part 1. In Proceedings of the International Micro Air Vehicle Conference (IMAV 2016), Beijing, China, 17–21 October 2016. [Google Scholar]
- Prudden, S.; Fisher, A.; Marino, M.; Mohamed, A.; Watkins, S.; Wild, G. Measuring wind with Small Unmanned Aircraft Systems. J. Wind Eng. Ind. Aerodyn. 2018, 176, 197–210. [Google Scholar] [CrossRef]
- Palomaki, R.T.; Rose, N.T.; van den Bossche, M.; Sherman, T.J.; De Wekker, S.F. Wind estimation in the lower atmosphere using multirotor aircraft. J. Atmos. Ocean. Technol. 2017, 34, 1183–1191. [Google Scholar] [CrossRef]
- Nolan, P.; Pinto, J.; González-Rocha, J.; Jensen, A.; Vezzi, C.; Bailey, S.; de Boer, G.; Diehl, C.; Laurence, R.; Powers, C.; et al. Coordinated Unmanned Aircraft System (UAS) and Ground-Based Weather Measurements to Predict Lagrangian Coherent Structures (LCSs). Sensors 2018, 18, 4448. [Google Scholar] [CrossRef] [PubMed]
- Villa, T.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.; Morawska, L. An overview of small unmanned aerial vehicles for air quality measurements: Present applications and future prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef] [PubMed]
- Villa, T.F.; Salimi, F.; Morton, K.; Morawska, L.; Gonzalez, F. Development and validation of a UAV based system for air pollution measurements. Sensors 2016, 16, 2202. [Google Scholar] [CrossRef]
- de Podesta, M.; Underwood, R.; Bevilacqua, L.; Bell, S. Air temperature measurement challenges in precision metrology. J. Phys. Conf. Ser. 2018, 1065, 122027. [Google Scholar] [CrossRef]
- de Podesta, M.; Bell, S.; Underwood, R. Air temperature sensors: dependence of radiative errors on sensor diameter in precision metrology and meteorology. Metrologia 2018, 55, 229. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Waugh, S.; Duthoit, S.; Chilson, P.B. Considerations for temperature sensor placement on rotary-wing unmanned aircraft systems. Atmos. Meas. Tech. 2018, 11, 5519–5530. [Google Scholar] [CrossRef] [Green Version]
- Jacob, J.; Chilson, P.; Houston, A.; Smith, S. Considerations for atmospheric measurements with small unmanned aircraft systems. Atmosphere 2018, 9, 252. [Google Scholar] [CrossRef]
- Houston, A.L.; Keeler, J.M. The impact of sensor response and airspeed on the representation of the convective boundary layer and airmass boundaries by small unmanned aircraft systems. J. Atmos. Ocean. Technol. 2018, 35, 1687–1699. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Bell, T.M.; Pillar-Little, E.A.; Chilson, P.B. Environmental and Sensor Integration Influences on Temperature Measurements by Rotary-Wing Unmanned Aircraft Systems. Sensors 2019, 19, 1470. [Google Scholar] [CrossRef]
- Ventura Diaz, P.; Yoon, S. High-fidelity computational aerodynamics of multi-rotor unmanned aerial vehicles. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018; p. 1266. [Google Scholar]
- Yoon, S.; Ventura Diaz, P.; Boyd, D.D.; Chan, W.M.; Theodore, C.R. Computational aerodynamic modeling of small quadcopter vehicles. In Proceedings of the 73rd Annual AHS International Forum and Technology Display 2017, Fort Worth, TX, USA, 9–11 May 2017. [Google Scholar]
- Hemingway, B.L.; Frazier, A.E.; Elbing, B.R.; Jacob, J.D. Vertical sampling scales for atmospheric boundary layer measurements from small unmanned aircraft systems (sUAS). Atmosphere 2017, 8, 176. [Google Scholar] [CrossRef]
- Lee, T.R.; Buban, M.; Dumas, E.; Baker, C.B. A new technique to estimate sensible heat fluxes around micrometeorological towers using small unmanned aircraft systems. J. Atmos. Ocean. Technol. 2017, 34, 2103–2112. [Google Scholar] [CrossRef]
- Lee, T.; Buban, M.; Dumas, E.; Baker, C. On the Use of Rotary-Wing Aircraft to Sample Near-Surface Thermodynamic Fields: Results from Recent Field Campaigns. Sensors 2019, 19, 10. [Google Scholar] [CrossRef] [PubMed]
- Brown, G.; Rebollo, M. A small, fast-response probe to measure composition of a binary gas mixture. AIAA J. 1972, 10, 649–652. [Google Scholar] [CrossRef]
- International Society for Atmospheric Research using Remotely Piloted Aircraft (ISARRA) 2018. Available online: https://isarra.colorado.edu/ (accessed on 25 February 2019).
- Anderson, S.P.; Baumgartner, M.F. Radiative heating errors in naturally ventilated air temperature measurements made from buoys. J. Atmos. Ocean. Technol. 1998, 15, 157–173. [Google Scholar] [CrossRef]
- McCarthy, J. A method for correcting airborne temperature data for sensor response time. J. Appl. Meteorol. 1973, 12, 211–214. [Google Scholar] [CrossRef]
- Houston, A.; Chilson, P.; Islam, A.; Shankar, A.; Greene, B.; Segales, A.; Detweiler, C. PTH Sensor Siting on Rotary-Wing UAS. In Proceedings of the 19th AMS Symposium on Meteorological Observation and Instrumentation, Austin, TX, USA, 7–11 January 2018; AMS: Austin, TX, USA, 2018. [Google Scholar]
- DJI Matrice 600 Pro. Available online: https://www.dji.com/matrice600-pro/info#specs (accessed on 2 May 2019).
- Odroid XU4. Available online: https://www.hardkernel.com/shop/odroid-xu4/ (accessed on 25 February 2019).
- Robot Operating System (ROS). Available online: http://www.ros.org/ (accessed on 25 February 2019).
- Mobile UAS Research Collaboratory (MURC). Available online: https://www.colorado.edu/iriss/content/equipment (accessed on 27 February 2019).
- White, F.M. Fluid Mechanics; McGraw-Hill: New York, NY, USA, 1986; Chapter 6. [Google Scholar]
- Gooch, J.W. Hagen-Poiseuille Equation. In Encyclopedic Dictionary of Polymers; Springer: New York, NY, USA, 2011; p. 355. [Google Scholar]
- Lawrence, M.G. The relationship between relative humidity and the dewpoint temperature in moist air: A simple conversion and applications. Bull. Am. Meteorol. Soc. 2005, 86, 225–234. [Google Scholar] [CrossRef]
- Chowdhary, G.V.; Srinivasan, S.; Johnson, E.N. Frequency domain method for real-time detection of oscillations. J. Aerosp. Comput. Inf. Commun. 2011, 8, 42–52. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Configuration | Temperature | Humidity | Shielding | Comments |
|---|---|---|---|---|---|
| 1 | Direct Downwash | ✓ | ✓ | x | Mixed air; reading is especially unstable during descent |
| 2 | Over the UAS | x | x | x | Insufficient aspiration |
| 3 | Under the UAS | x | x | x | Mixed air and insufficient aspiration |
| 4 | Direct Upwash | ✓ | ✓ | x | Possibly insufficient aspiration |
| 5 | Downwash housing | ✓ | ✓ | ✓ | Mixed and turbulent Air |
| 6 | Upwash Housing with Inlet Pointed Inside | ✓ | ✓ | ✓ | Air source is in the wake of the UAS |
| 7 | Upwash Housing with Inlet Pointed Outside | ✓ | ✓ | ✓ | Air is sourced outside of the UAS interference |
| XQ2 | XQ1 | nimbus-pth | MURC | RadioSonde | ||
|---|---|---|---|---|---|---|
| (iMet XQ2) | (iMet XQ1) | (Custom Built) | (Gill MetPak Pro) | (RS92) | ||
| Temperature | Type | Bead Thermistor | Bead Thermistor | Bead Thermistor | pt100 1/3 Class B | Capacitive Wire |
| Range | −90 to 50 C | −95 to 50 C | −40 to 100 C | −50 to 100 C | −90 to 60 C | |
| Response Time | 1s @ 5 m/s | 2 s | <0.5 s | <0.4 s @ 6 m/s flow | ||
| Resolution | 0.01 C | 0.01 C | 0.01 C | 0.1 C | 0.01 C | |
| Accuracy | ±0.3 C | ±0.3 C | ±0.1 C | 0.5 C | ||
| Humidity | Type | Capacitive | Capacitive | Capacitive | Capacitive | |
| Range | 0–100% RH | 0–100% RH | 0–100% | 0–100% RH | 0–100% RH | |
| @ 25 C, 0.6 s | 5 s @ 1 m/s velocity | 8 s | @ 20 C, <0.5 s | |||
| Response Time | @ 5 C, 5.2 s | @ −40 C, <20 s | ||||
| @ −10 C, 10.9 s | @ 6 m/s | |||||
| Resolution | 0.1% RH | 0.7% RH | 0.01% RH | 0.1% RH | 1% RH | |
| Accuracy | ±5% RH | ±5% RH | ±2% | ±0.8% | 5% RH |
| Sensor | Temperature (C) | Humidity (%) | ||||
|---|---|---|---|---|---|---|
| Mean | Variance | RMS | Mean | Variance | RMS | |
| P1XQ1 | 0.32 | 0.064 | 0.41 | 0.51 | 1.324 | 1.26 |
| P1XQ2 | 0.05 | 0.043 | 0.21 | 1.51 | 1.546 | 1.96 |
| P2XQ2 | 0.07 | 0.048 | 0.23 | 2.70 | 2.266 | 3.09 |
| P2Nimbus1 | −0.22 | 0.075 | 0.35 | −4.56 | 3.915 | 4.97 |
| P2Nimbus2 | 0.13 | 0.059 | 0.28 | −4.58 | 3.870 | 4.99 |
| UAS Platform | Horizontal Speed | Temperature (C) | Humidity (%) | ||
|---|---|---|---|---|---|
| Mean | Std | Mean | Std | ||
| 2 | 12.90 | 0.08 | 91.03 | 1.09 | |
| M600 P1 | 5 | 13.44 | 0.06 | 88.71 | 0.98 |
| 10 | 14.11 | 0.15 | 85.04 | 1.30 | |
| 2 | 13.02 | 0.06 | 93.46 | 1.20 | |
| M600 P2 | 5 | 13.59 | 0.05 | 91.59 | 1.41 |
| 10 | 14.5 | 0.06 | 83.86 | 1.37 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, A.; Houston, A.L.; Shankar, A.; Detweiler, C. Design and Evaluation of Sensor Housing for Boundary Layer Profiling Using Multirotors. Sensors 2019, 19, 2481. https://doi.org/10.3390/s19112481
Islam A, Houston AL, Shankar A, Detweiler C. Design and Evaluation of Sensor Housing for Boundary Layer Profiling Using Multirotors. Sensors. 2019; 19(11):2481. https://doi.org/10.3390/s19112481
Chicago/Turabian StyleIslam, Ashraful, Adam L. Houston, Ajay Shankar, and Carrick Detweiler. 2019. "Design and Evaluation of Sensor Housing for Boundary Layer Profiling Using Multirotors" Sensors 19, no. 11: 2481. https://doi.org/10.3390/s19112481
APA StyleIslam, A., Houston, A. L., Shankar, A., & Detweiler, C. (2019). Design and Evaluation of Sensor Housing for Boundary Layer Profiling Using Multirotors. Sensors, 19(11), 2481. https://doi.org/10.3390/s19112481