A Sensor Array for the Measurement of Relative Motion in Lower Limb Prosthetic Sockets



Abstract
:1. Introduction
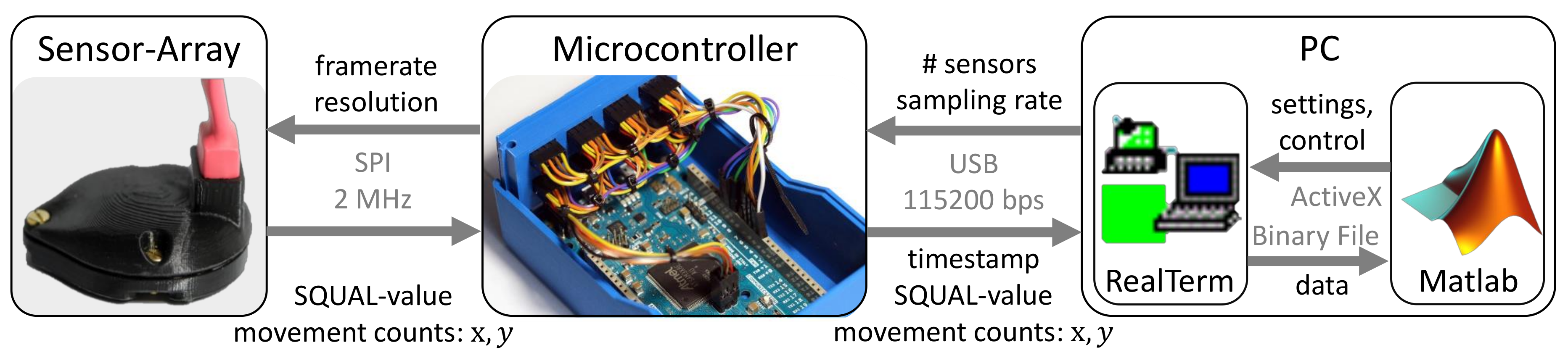
2. Measurement System
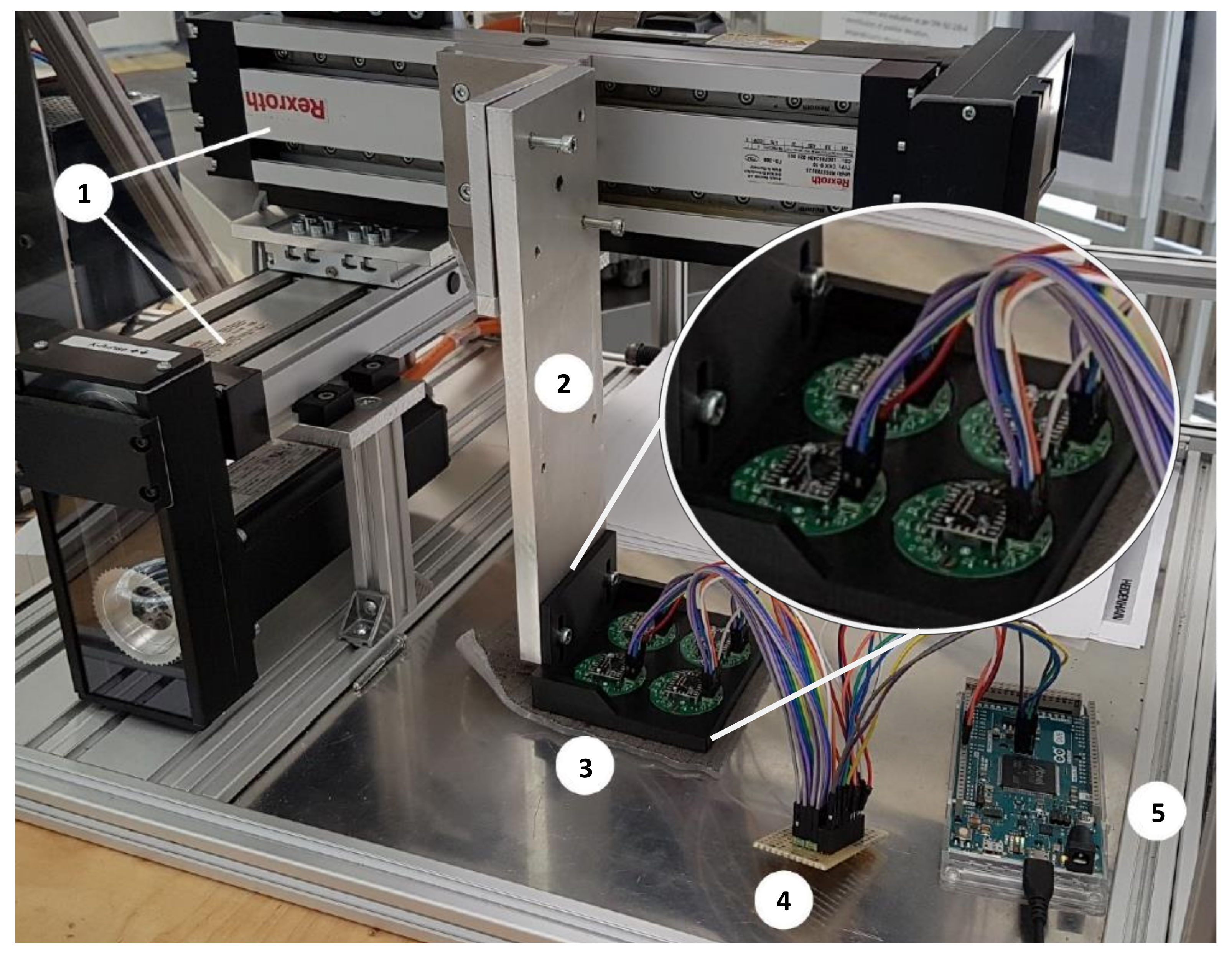
3. Test Rig Evaluation
3.1. Methodology
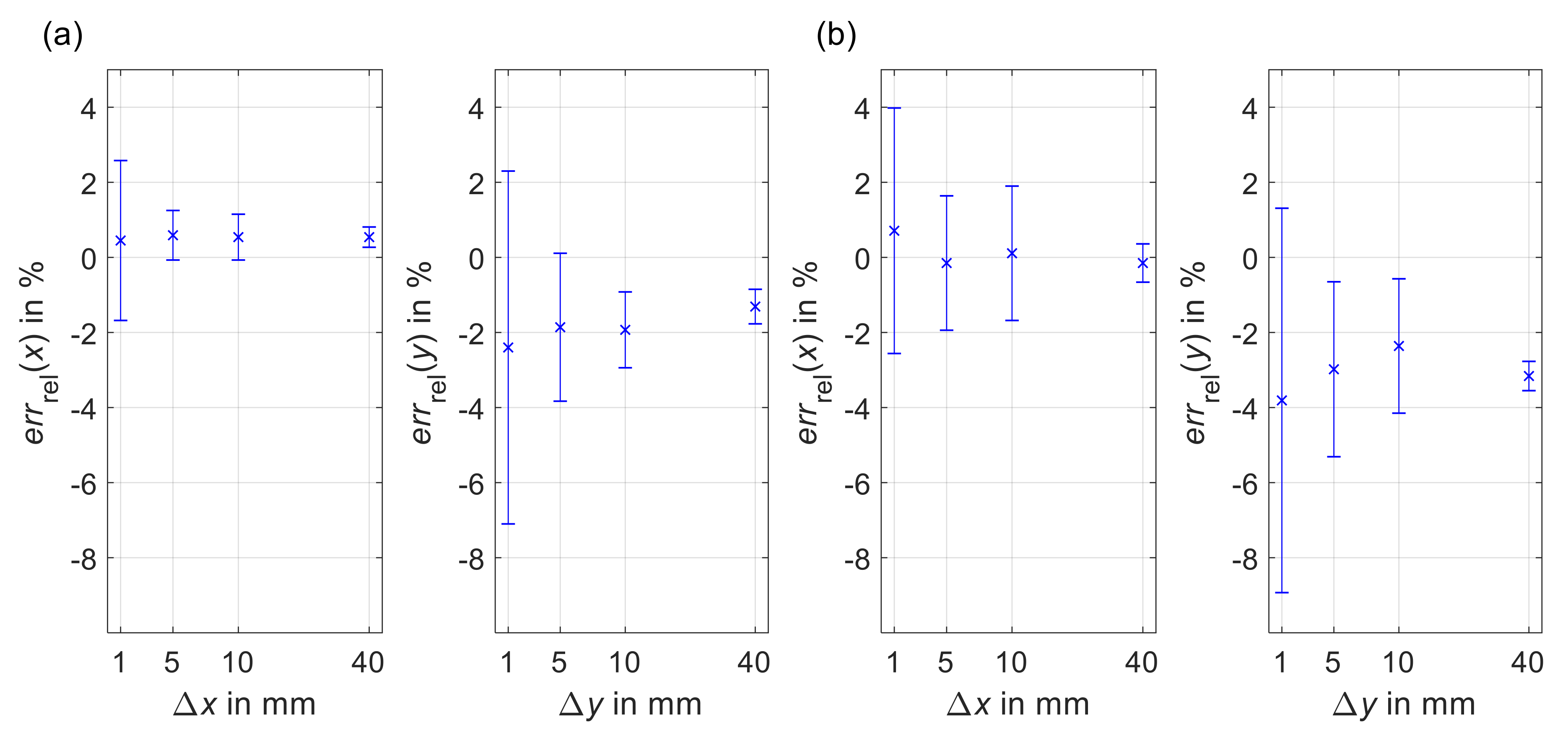
3.2. Performance Results
3.3. Indication
4. Pilot Study
4.1. Methodology
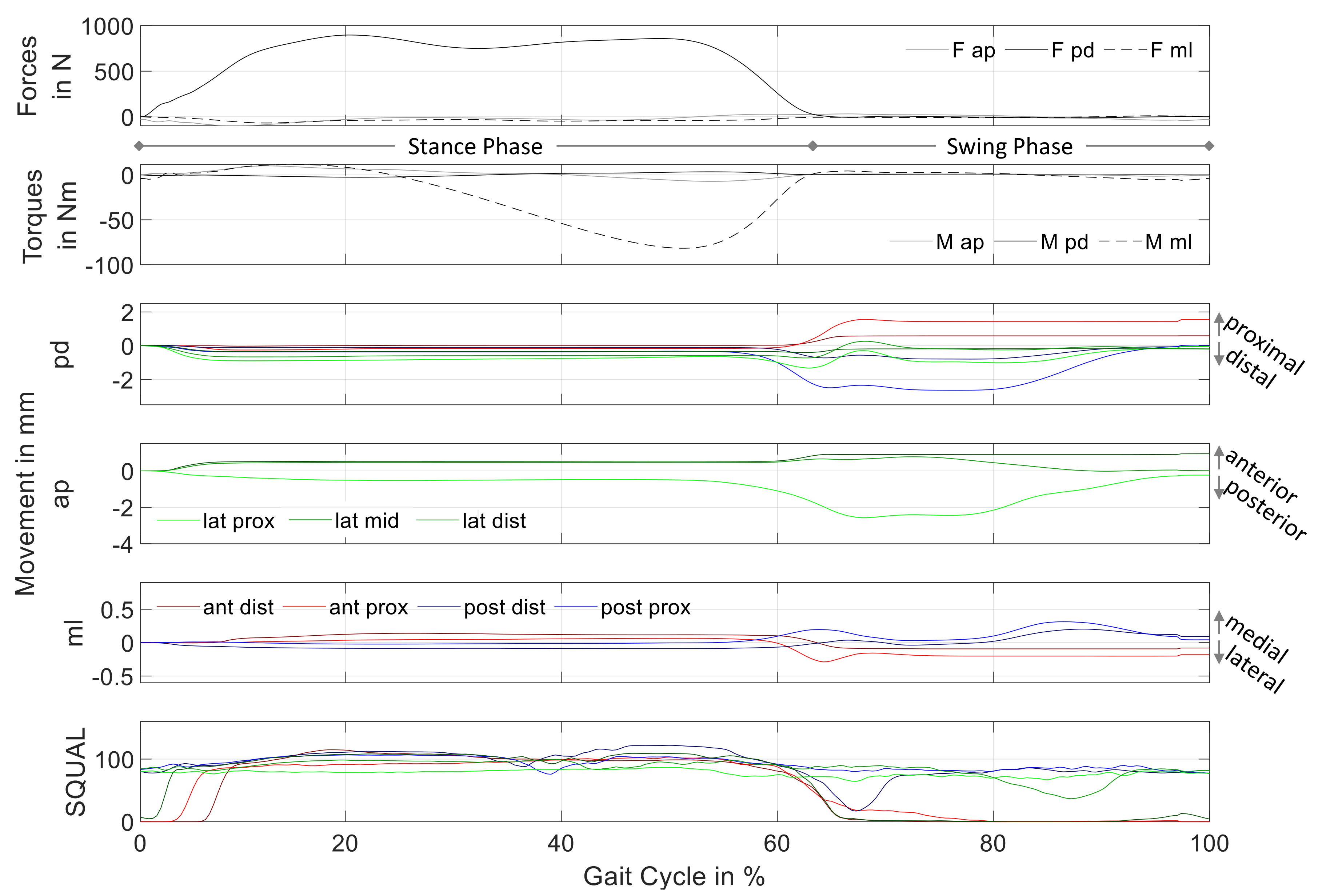
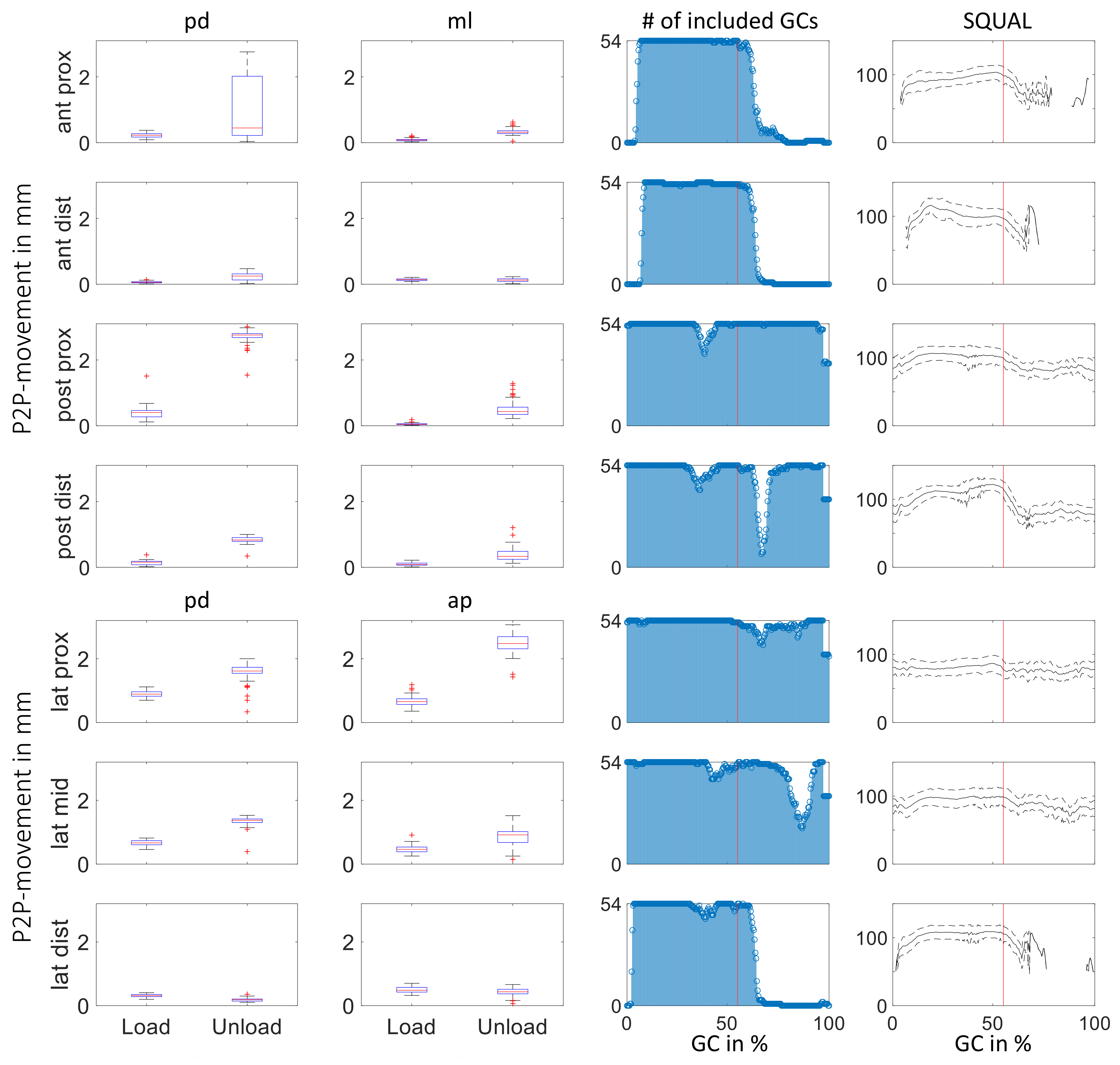
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| SPI | Serial Peripheral Interface |
| PLA | Polylactide |
| USB | Universal Serial Bus |
| cpi | counts per inch |
| pcb | printed circuit board |
| GC | gait cycle |
| pd | proximodistal |
| ap | anteroposterior |
| ml | mediolateral |
| P2P | Peak-to-Peak |
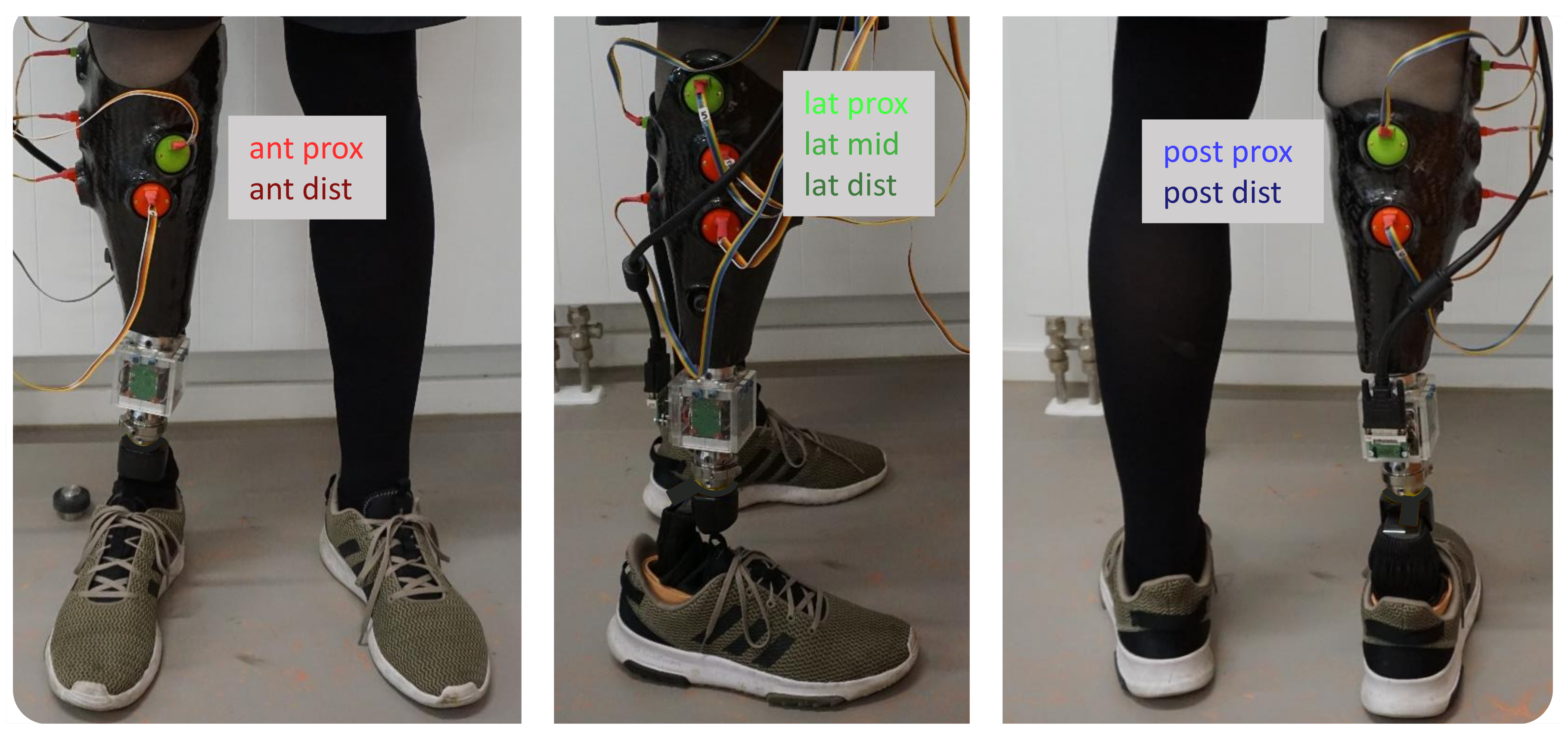
| ant prox | anterior proximal measurement site |
| ant dist | anterior distal measurement site |
| lat dist | lateral distal measurement site |
| lat mid | lateral middle measurement site |
| lat prox | lateral proximal measurement site |
| post dist | posterior distal measurement site |
| post prox | posterior proximal measurement site |
References
- Paterno, L.; Ibrahimi, M.; Gruppioni, E.; Menciassi, A.; Ricotti, L. Sockets for limb prostheses: A review of existing technologies and open challenges. IEEE Trans. Biomed. Eng. 2018, 65, 1996–2010. [Google Scholar] [CrossRef] [PubMed]
- Eshraghi, A.; Osman, N.A.A.; Gholizadeh, H.; Karimi, M.; Ali, S. Pistoning assessment in lower limb prosthetic sockets. Prosthet. Orthot. Int. 2012, 36, 15–24. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Noll, V.; Wojtusch, J.; Schuy, J.; Grimmer, M.; Beckerle, P. Measurement of biomechanical interactions at the stump-socket interface in lower limb prostheses. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015. [Google Scholar]
- Childers, W.L.; Siebert, S. Marker-based method to measure movement between the residual limb and a transtibial prosthetic socket. Prosthetics Orthot. Int. 2016, 40, 720–728. [Google Scholar] [CrossRef] [PubMed]
- Eshraghi, A.; Abu Osman, N.A.; Karimi, M.T.; Gholizadeh, H.; Ali, S.; Abas, W.W.; Azam, M.N. Quantitative and qualitative comparison of a new prosthetic suspension system with two existing suspension systems for lower limb amputees. Am. J. Phys. Med. Rehabil. 2012, 91, 1028–1038. [Google Scholar] [CrossRef] [PubMed]
- Gholizadeh, H.; Osman, N.A.A.; Kamyab, M.; Eshraghi, A.; Abas, W.W.; Azam, M.N. Transtibial prosthetic socket pistoning: static evaluation of Seal-In® X5 and Dermo® Liner using motion analysis system. Clin. Biomech. Bristol. Avon. 2012, 27, 34–39. [Google Scholar] [CrossRef] [PubMed]
- Appoldt, F.; Bennett, L.; Contini, R. The results of slip measurements in above-knee suction sockets. Bull. Prosthetics Res. 1968, 3, 106–112. [Google Scholar]
- Gholizadeh, H.; Osman, N.A.A.; Lúvíksdóttir, Á.G.; Eshraghi, A.; Kamyab, M.; Abas, W.W.; Azam, M.N. A new approach for the pistoning measurement in transtibial prosthesis. Prosthetics Orthot. Int. 2011, 35, 360–364. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sanders, J.E.; Karchin, A.; Fergason, J.R.; Sorenson, E.A. A noncontact sensor for measurement of distal residual-limb position during walking. J. Rehabil. Res. Dev. 2006, 43, 509–516. [Google Scholar] [CrossRef] [PubMed]
- Henrikson, K.M.; Weathersby, E.J.; Larsen, B.G.; Cagle, J.C.; McLean, J.B.; Sanders, J.E. An Inductive Sensing System to Measure In-Socket Residual Limb Displacements for People Using Lower-Limb Prostheses. Sensors 2018, 18, 3840. [Google Scholar] [CrossRef] [PubMed]
- Gerschutz, M.J.; Hayne, M.L.; Colvin, J.M.; Denune, J.A. Dynamic Effectiveness Evaluation of Elevated Vacuum Suspension. J. Prosthetics Orthot. 2015, 27, 161–165. [Google Scholar] [CrossRef]
- Swanson, E.C.; McLean, J.B.; Allyn, K.J.; Redd, C.B.; Sanders, J.E. Instrumented socket inserts for sensing interaction at the limb-socket interface. Med. Eng. Phys. 2018, 51, 111–118. [Google Scholar] [CrossRef] [PubMed]
- Wernke, M.M.; Schroeder, R.M.; Haynes, M.L.; Nolt, L.L.; Albury, A.W.; Colvin, J.M. Progress Toward Optimizing Prosthetic Socket Fit and Suspension Using Elevated Vacuum to Promote Residual Limb Health. Adv. Wound Care 2017, 6, 233–239. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vempala, V.; Liu, M.; Kamper, D.; Huang, H. A practical approach for evaluation of socket pistoning for lower limb amputees. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Honolulu, HI, USA, 17–21 July 2018; pp. 3938–3941. [Google Scholar]
- Noll, V.; Weber, P.; Scortecci, S.; Beckerle, P.; Rinderknecht, S. A sensor to acquire the relative movement between residual limb and prosthetic socket. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 6–12 October 2016. [Google Scholar]
- Noll, V.; Rinderknecht, S.; Beckerle, P. Systematic experimental assessment of a 2D-Motion sensor to detect relative movement between residual limb and prosthetic socket. Sensors 2018, 18, 2170. [Google Scholar] [CrossRef]
- Whitmore, S. Realization of a Measuring Device for Recording the Relative Movement between Residual Limb and Prosthetic Socket. Ph.D. Thesis, Technische Universität Darmstadt, Darmstadt, Germany, 2018. [Google Scholar]
- Schuy, J.; Rinderknecht, S. Integrated measurement system for amputee gait analysis: A pilot study. In Proceedings of the 2014 IEEE Healthcare Innovation Conference (HIC), Seattle, WA, USA, 8–10 October 2014; pp. 91–94. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Group | Description | Abbreviation |
|---|---|---|---|
| anterior proximal | comparison | medial tibial flair | ant prox |
| anterior distal | problem | distal end of tibia bone | ant dist |
| lateral proximal | comparison | lateral support | lat prox |
| lateral middle | problem | fibula | lat mid |
| lateral distal | problem | distal end of fibula bone | lat dist |
| posterior proximal | comparison | center of posterior compartment | post prox |
| posterior distal | problem | distal end of tibia bone | post dist |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noll, V.; Whitmore, S.; Beckerle, P.; Rinderknecht, S. A Sensor Array for the Measurement of Relative Motion in Lower Limb Prosthetic Sockets. Sensors 2019, 19, 2658. https://doi.org/10.3390/s19122658
Noll V, Whitmore S, Beckerle P, Rinderknecht S. A Sensor Array for the Measurement of Relative Motion in Lower Limb Prosthetic Sockets. Sensors. 2019; 19(12):2658. https://doi.org/10.3390/s19122658
Chicago/Turabian StyleNoll, Veronika, Sigrid Whitmore, Philipp Beckerle, and Stephan Rinderknecht. 2019. "A Sensor Array for the Measurement of Relative Motion in Lower Limb Prosthetic Sockets" Sensors 19, no. 12: 2658. https://doi.org/10.3390/s19122658
APA StyleNoll, V., Whitmore, S., Beckerle, P., & Rinderknecht, S. (2019). A Sensor Array for the Measurement of Relative Motion in Lower Limb Prosthetic Sockets. Sensors, 19(12), 2658. https://doi.org/10.3390/s19122658