1. Introduction
With the rapid development in underwater information acquisition and transmission, the small underwater autonomous mobile platform is drawing more and more attention from the fields of marine environmental monitoring, ocean sampling, and oceanic engineering because of its low-cost, convenience, and capability for dense deployment. Underwater acoustic communication is urgently required for many autonomous underwater vehicle (AUV) applications to allow transmission of data and control among each other [
1]. However, it has been well recognized that multipath expansion, time-varied fading, and Doppler spreading in both time and frequency domains are challenging topics for underwater acoustic communication.
For the specific application in small AUVs, because of the relatively short distance as well as low data rate requirement, the problems of low signal noise ratio (SNR) or channel multipath can be mitigated by adopting a suitable modulation manner such as spread spectrum. Thus, in many cases the Doppler spread generated by AUV motion becomes the most severe issue [
2] to be addressed by modem design.
A significant amount of research has been conducted on Doppler estimation and correction. Johnson et al. [
3] proposed to calculate the cross-correlation between a branch of local Doppler reference signals and the received signal, the highest correlation among which corresponds to the real Doppler. To reduce the number of correlation calculations needed for a Doppler search, Sharif et al. [
4] adopted two LFM (linear frequency modulation) signals spaced with a fixed period to produce two correlation peaks, the interval of which offers an indicator for the bulk Doppler. The proposed Doppler estimator proved to be robust despite the complex channel responses. Tu et al. [
5] designed a multiple-resampling (MR) scheme, where each MR branch matched the Doppler factor of a particular propagation path.
Among other areas of progress, He et al. [
6] proposed an accurate Doppler shift estimation method, which automatically matched underwater acoustic multipath channels. This Doppler shift estimation scheme also featured high channel adaptability. Yue et al. [
7] proposed a Doppler estimation and compensation method for fast-moving transceivers by incorporating the Doppler invariance of hyperbolic frequency modulation. Cui et al. [
8] presented a Doppler estimation method using a cyclic prefix to achieve higher accuracy.
Compared with extensive and active research in different Doppler estimation strategies, there is a lack of investigation on the theoretical principle of Doppler correction, as it is straightforward that Doppler compensation can be effectively achieved by resampling after estimating Doppler with various approaches. While it is easy and convenient to conduct offline resampling in software, from the viewpoint of hardware implementation, real-time resampling still poses significant difficulties to the engineering application of an acoustic modem, mainly because of the computational complexity involved. For small AUVs where the power supply and processor calculation capability are strictly limited, reconstructing and resampling the frame signal, thus, poses challenges to the onboard electronics.
In this paper, a hardware Doppler mitigation approach is proposed in the modem design. By directly tuning the analog-to-digital (AD) sampling rate according to the Doppler estimate, our approach significantly reduces the computational load for its implementation on small AUVs. The proposed modem also utilizes a spread spectrum modulation scheme to enable robust, low data rate communication. Each signal frame begins with a synchronization signal that also serves as the Doppler probe. Once the synchronization is in lock, Doppler can be estimated to calculate the corresponding sampling rate to correct the Doppler spread. Then, the AD sampling rate is adjusted accordingly to directly compensate for the Doppler effects. Our approach enables the adoption of a low-cost and relatively simple processor for modem design; thus, it is well suited to small AUVs. A sea trial as well as a lake trial has been conducted to verify the effectiveness of the proposed acoustic modem.
2. System Design
2.1. Direct Sequence Spread Spectrum (DSSS) Modulation
As the principle of spread spectrum (SS) technology is well known, they are briefly reviewed here from an engineering viewpoint of the modem design. By directly modulating the information to be transmitted into a broad frequency band with a pseudorandom sequence and then recovering the transmitted information sequence through demodulation and de-spreading processes, a direct sequence spread spectrum (DSSS) is adopted to yield a strong anti-interference ability, a strong anti-multipath capability, and multiple user access capabilities and robustness under low SNR [
9]. Moreover, differential coherent demodulation is employed to mitigate the time variations induced by UWA channels. The block diagram of DS-DBPSK (Direct Sequence-Differential Binary Phase Keying) modulation is shown in
Figure 1.
The frame structure of the system is displayed in
Figure 2, which consists of two LFM signals and the data packet. While the first LFM signal acts as the synchronization header as well as the first reference for Doppler estimation, the second one is used as the second reference signal for Doppler estimation with a fixed interval between them. Considering the precision of Doppler estimation as well as the communication efficiency, the length of the fixed interval
Ttp is set to be ten times the length of the LFM signal
Tsyn. Meanwhile, a protection interval was inserted between the second LFM signal and the following data packet to avoid interference, the length of which
Tguard equals the length of the LFM signal. The specific duration of each component of the frame structure is provided in
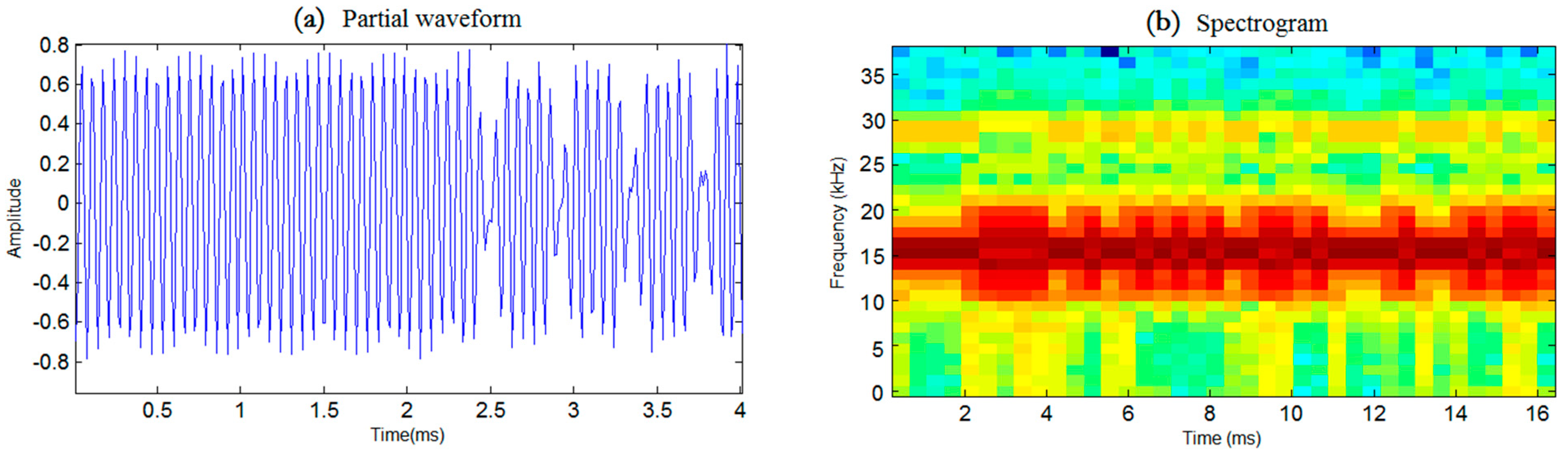
Table 1. Shown in
Figure 3a,b is the partial waveform as well as the spectrogram of a data symbol, respectively.
2.2. Doppler Estimation and Correction
As the estimation of Doppler is not the novel contribution of this work, a conventional and simple time- domain estimation approach is directly utilized to facilitate practical implementation. With two chirp signals located with a fixed interval
in the signal frame, as shown in
Figure 2, the Doppler can be obtained by performing cross-correlation and then measuring the real interval
of two correlation peaks associated with these two LFM signals. As the Doppler time domain expansion is equivalent to the degree of signal contraction or expansion [
10], the Doppler factor can be calculated according to the following equation:
Generally, after estimating the Doppler, a resampling calculation can be directly used to compensate for it. As mentioned above, while it is pretty convenient to perform resampling in an offline manner by means of computation software such as Matlab, from the viewpoint of practical modem design the implementation of resampling poses significant difficulties for the microprocessor because of the real-time computational complexity involved. Considering that adjusting the AD sampling rate is equivalent to resampling the received signal, a novel Doppler correction approach, by directly tuning the AD sampling rate, is proposed to reduce the real-time computational complexity of the microprocessor and thus facilitate hardware implementation.
Specifically, the total duration of a frame is 6.8 s for the proposed modem, corresponding to 510,000 samples under a signal sampling rate of
fs = 75 K sps. With the traditional principle of software resampling, the original signal sequence needs to first be up-sampled by an integer factor of
I, and then the output sequence is calculated by a linear interpolation algorithm according to the following equation [
11]:
where
is the output after resampling, and
and
are the adjacent points after up-sampling. One may conclude from the algorithm equations that the computational complexity of the resampling process algorithm is
O(
), which means a large calculation requirement considering the frame duration of the proposed system. Instead, by the proposed Doppler correction method of adjusting the AD sampling rate, the Doppler compensation can be directly fulfilled at the same time as the analog-to-digital conversion process; thus, no additional calculation is needed in the microprocessor for the Doppler correction. In other words, the proposed hardware resampling scheme will enable the adoption of a low-cost microprocessor with a relatively low calculation capability and small memory space.
2.3. Hardware Implementation of Analog-To-Digital (AD) Sampling Rate Adjustment
The acoustic modem designed in this paper is based on the STM32F4 series processor of the Coetex-M4 core, which has the advantages of short cycle times and low power consumption under a clock speed of up to 168 MHz. As the Doppler is directly compensated by hardware resampling, the proposed system is capable of greatly reducing the complexity of the real-time calculation in the processor, thus facilitating hardware implementation and engineering integration in a small AUV platform [
12,
13]. To further improve the communication performance, convolutional coding is also adopted with a convolutional coding rate of 1/2. The detailed implementation of DSSS demodulation at the receiver is shown in
Figure 4.
For the hardware Doppler correction method by tuning the AD sampling rate, the resolution of the AD sampling rate adjustment will determine compensation performance. In the proposed system, the internal ADC (Analog-to-Digital Converter) of the STM32F4 processor is directly used under the timer interruption mode; thus, the instant sampling rate
fas is calculated by dividing the clock frequency
fc with a timer parameter. With an
fc = 84 MHz, the timer parameter is set to generate the instant sampling rate
fas corresponding to the calculated Doppler according to the following equation:
Specifically, implementation of the adjustable AD sampling rate is achieved by software to set the timer parameter of the processor according to the calculated Doppler. As there is a protection interval between the second LFM signal and the data segment, the calculation of Doppler as well as the adjustment of the AD sampling rate can be conducted during this period to ensure real-time implementation.
2.4. Software Design
As the software design of the transmitter is relatively straightforward for the community, we briefly introduce the software design of the AD sampling rate adjustable receiver to further illustrate the main contribution of this paper. The software flowchart of the receiver is presented in
Figure 5, from which one can see the specific implemental procedures of the AD sampling rate adjustment.
At the beginning of the flowchart, successful detection of the first LFM signal indicates the capturing of synchronization and then triggers the detection of the second LFM signal. Afterward, the real interval of two correlation peaks associated with these two LFM signals can be measured to facilitate Doppler estimation and timer parameter calculation. Then, the flowchart enters the timer interruption to trigger AD sampling, with the sampling rate determined by the timer parameter. With the adjusted AD sampling rate, the Doppler effects induced by the underwater acoustic channel can be compensated to guarantee the following demodulation procedures.
To ensure real-time implementation of synchronization capturing and Doppler estimation, a dual-buffer manner is adopted by dividing the memory space into a ‘ping’ buffer and a ‘pong’ buffer. With one buffer receiving data via ADC, the other buffer performs the cross-correlation calculation to detect and measure the arrival times of two LFM signals. The role of the two buffers will switch between ‘ping’ and ‘pong’ once the receiving buffer is full to guarantee real-time implementation.
Moreover, as the internal correlation function provided in the STM32 Digital Signal Processing function library will automatically save the end part of the previous correlation result to assemble with the current correlation result, continuity of the cross-correlation result can be ensured, even when the LFM signal is more or less equally spread over both buffers.
2.5. Hardware Design
The flow chart of the transmitter and receiver is provided in
Figure 6. While the signal generation before DAC (Digital-to-Analog Converter) in the transmitter as well as the demodulation after ADC in the receiver is implemented in the processor in forms of digital signal processing, the purpose of the analog part in the transmitter and receiver is to guarantee efficient emission and high-quality signal reception, respectively.
Because the bandwidth of the proposed MODEM (Modulator and Demodulator) is within the audio frequency range, the general audio interface integrated circuit chip WM8978 is directly adopted for the DAC of the emission signal, which offers convenient control registers for the processor. The piezoelectric transducer is adopted in our design, the bandwidth of which is 13–18 kHz with omni-directivity in the horizon to facilitate the communication application. As most of the piezoelectric transducer exhibits capacitive characteristics, an inductance circuit is used as an electrical impedance matching network to improve the transmitting efficiency.
In the receiver, the low-noise AD603 integrated circuit chip is selected as the preamplifier because the gain of which can be controlled by extra voltage to provide accurate, pin-selectable gains of −11 to +31 dB with a bandwidth of 90 MHz, or +9 to +51 dB with a bandwidth of 9 MHz. For the band-pass filter, the continuous-time active filter MAX274 integrated circuit chip is employed as it provides four second-order sections to enable the implementation of an eighth-order band-pass filter.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}