A Remote Control Strategy for an Autonomous Vehicle with Slow Sensor Using Kalman Filtering and Dual-Rate Control

 , ,
, ,
Abstract
:1. Introduction
- To provide the motion planning and control layers with a set of h-step-ahead path references. From this set and after successively iterating the different components of these layers in the current sensing period, a set of h-step-ahead control action estimates can be computed by following a delay-free control algorithm.
- To supply the upper layers of the AV structure included at the remote server with a set of h-step-ahead state predictions (computed by the motion planning and control layers in every sensing period), which is updated irrespective of the delay when a new packet is received.
2. Problem Scenario
2.1. Control Structure
- Fusing all the data provided by the different sensors (encoders, IMU, camera) by means of an Extended Kalman Filter (EKF) in order to estimate the state of the AV, reducing the noise effect. The extended version of the Kalman Filter is needed due to the non-linear nature of the AV.
- Including an h-step-ahead state prediction stage in the EKF, using a packet-based control strategy, for the purpose of dealing with network-induced delays, and providing the remote side with future, estimated data.
- Integrating dual-rate control with a view toward achieving the desired (nominal) control specifications, coping with slow sensing and packet disorder.
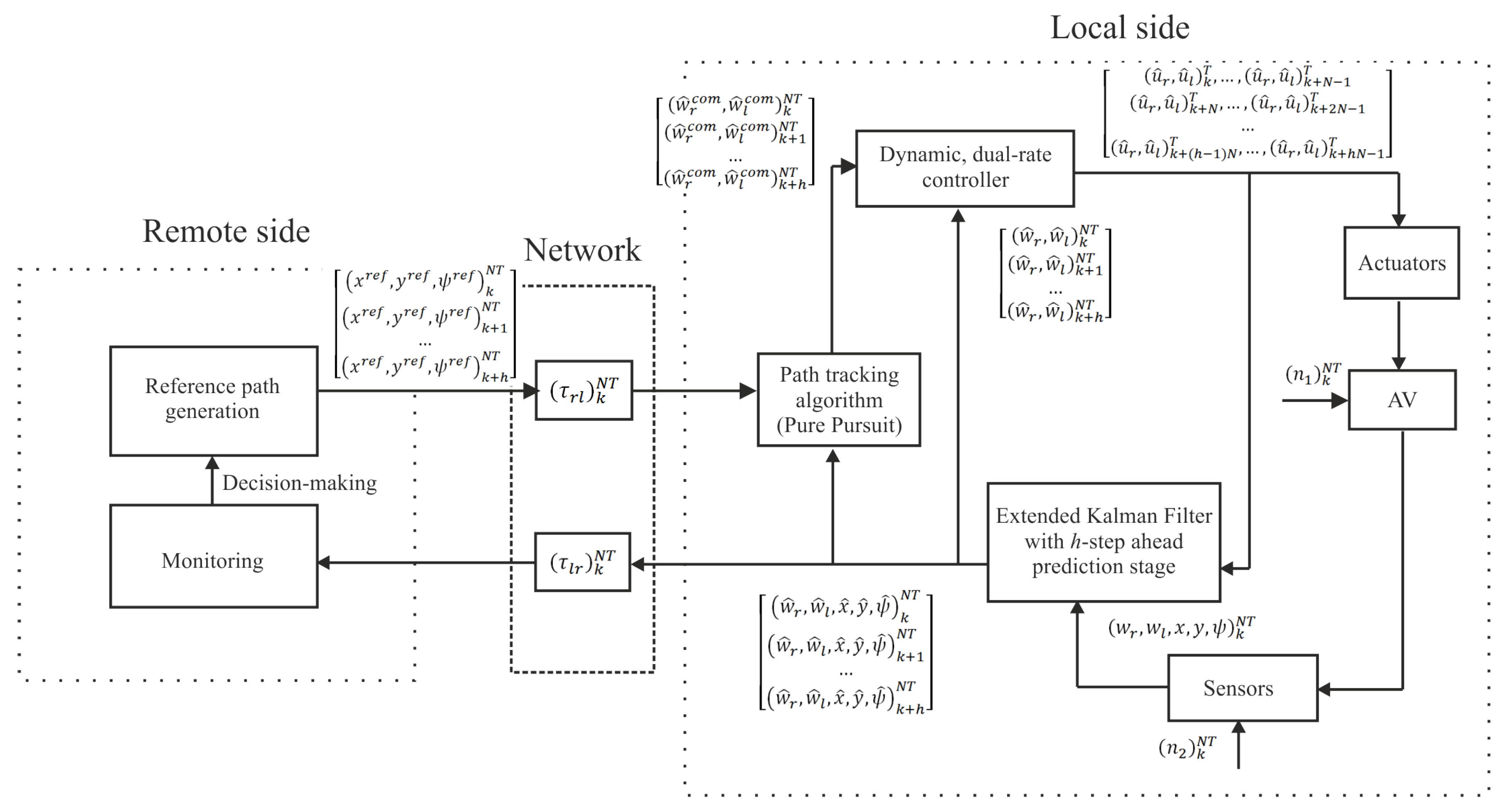
- At the current instant kNT, the remote side generates a set of h path references, which includes from the reference to be used at instant k, i.e., , to the reference to be used at instant , i.e., . The set is composed of reference positions and reference yaw angle , and it is sent to the local side in a packet.
- The local side gets the current system state , which coincides with the system output in this work, being affected by the process and measurement noises, and , respectively. The state is composed of angular velocities , positions , and yaw angle .
- The next estimation of the system state is computed via an Extended Kalman Filter (EKF). This estimation carried out by the EKF is actually the correction of the state.
- From this state and the path reference for the instant , i.e., , received in the previous packet after the remote-to-local delay , the path tracking algorithm (pure pursuit in this case) computes the dynamic reference, or command, for the instant , i.e., .
- From this dynamic reference and the estimated angular velocities , the dynamic, dual-rate controller computes the control signal to be applied to the AV, i.e., , which are the control actions in period T for the right and left motors, respectively, inside the sensing period . As a uniform actuation pattern, the actuation occurs at uniformly-spaced instants () under Zero Order Hold (ZOH) conditions inside the sensing period. That is, is applied at , is injected at , and so on, up to , which is actuated at .
- From this control signal and the estimated state for the instant , the h-step-ahead state prediction stage is able to compute the estimation of the state for the instant , i.e., . This computation is carried out in an open loop. Iterating the control loop h times, the local side can obtain the h state estimations to be sent in a packet to the remote side. Therefore, when the remote server receives the packet at the current time instant kNT and after the local-to-remote delay , it can manage future system information, for example, to be displayed and to make decisions.
2.2. Time-Varying Delays, and Packet Disorder
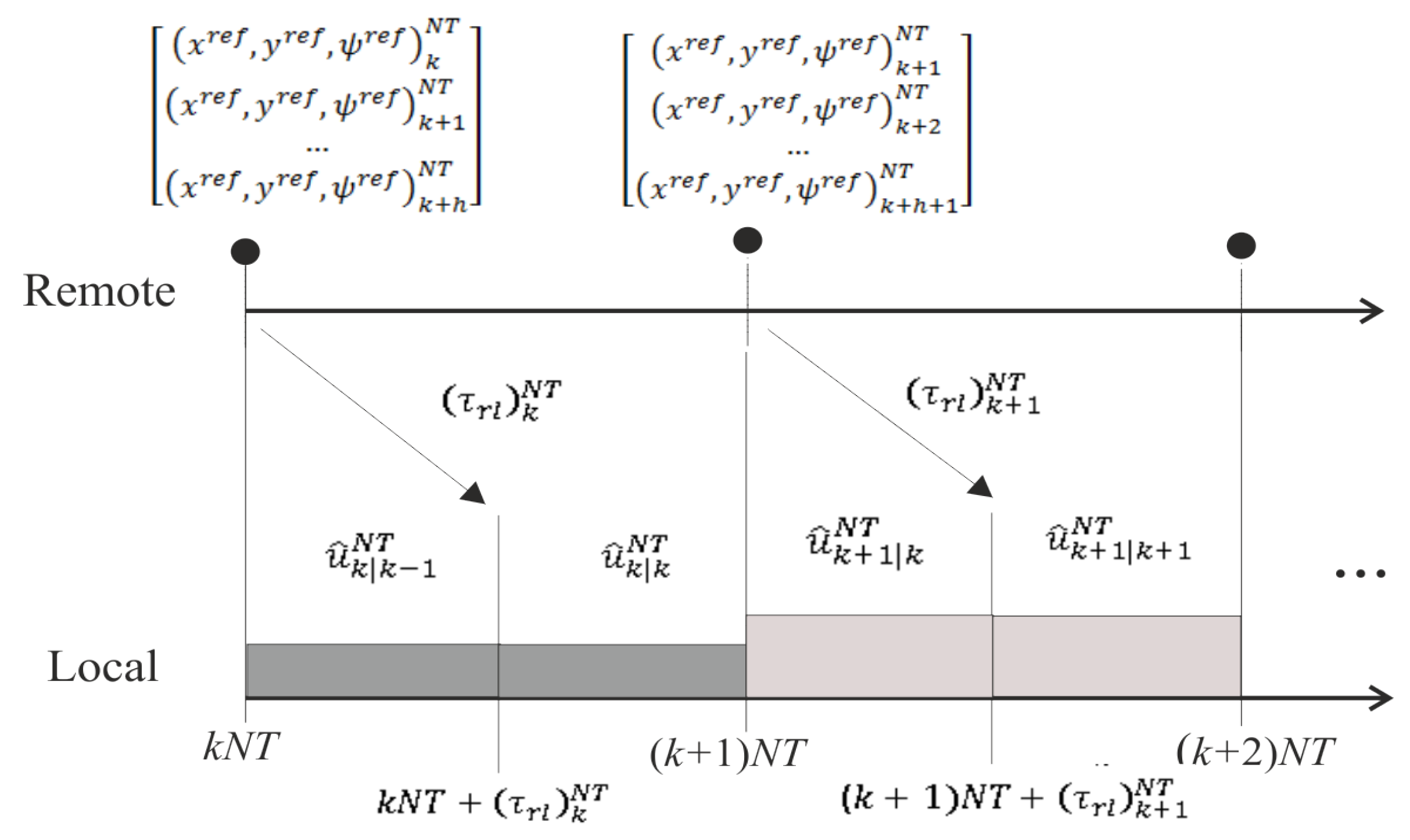
- Remote-to-local delays : By implementing the packet-based strategy, the packet with the set of references generated by the remote server from the instant to the instant arrives after the delay at the local side. As a consequence of integrating predictor-based control and assuming an accurate system model and an acceptable level of noise, this delay will not affect the control system. The reason is that, since the reference for the current instant was received in the previous delivery, the consequent estimated control action is already being injected from the beginning of the current period. When the packet is received, a new control action is computed from the corrected state. This control action will be very similar to the estimated one, and hence, an insignificant change is produced in the control signal. Note that possible changes in the reference due to decision-making tasks are recommended to be included at least from instant of the set of references in order to keep the described working mode, avoiding the delay effect. Figure 2 depicts a time axis example of this communication channel, where, for the sake of simplicity, a single-rate control at is considered. Notation means the estimated control action to be applied at instant , which is calculated at instant kNT from the reference . As shown, when the packet is received, a new control action is computed, which is practically the same as that previously calculated from the preceding delivery, i.e., and .
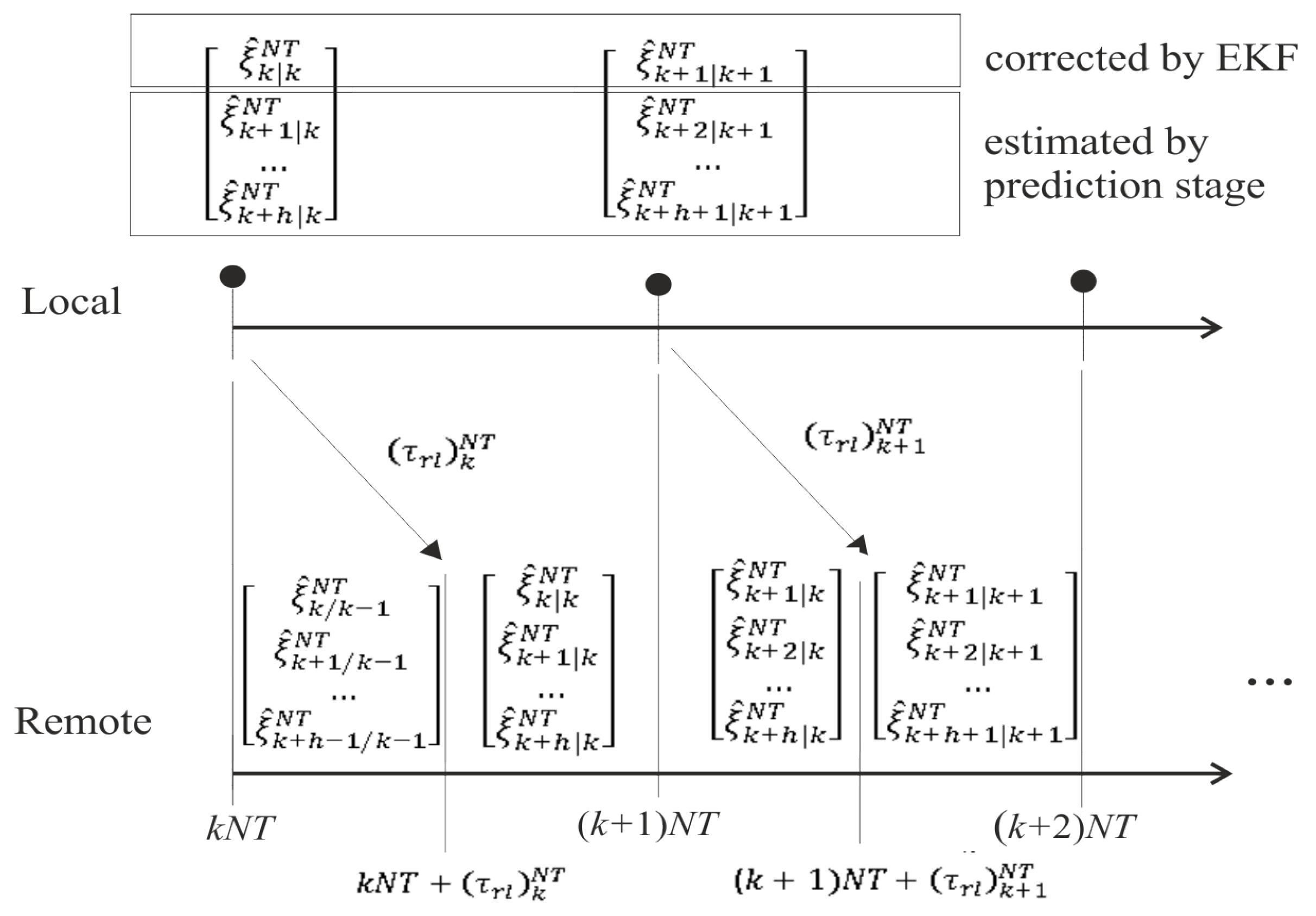
- Local-to-remote delays : Similar to the other link, by implementing the packet-based strategy, the packet with the set of estimations generated by the EKF and the h-step-ahead state prediction stage from instant to instant arrives after the delay at the remote side. The working mode is as follows: from the beginning of the period, a set of state estimates is used, and when a new packet arrives, this set is replaced with the received one, which includes state correction. Figure 3 depicts a time axis example of this communication channel. The notation means the state estimated for the instant at the instant , i.e., . The estimation is actually the state corrected by the EKF, and hence, the state estimate can be replaced with its correction . From this correction, the h-step-ahead state prediction stage estimates the rest of the state values in order to replace the previous estimations . Additionally, the prediction stage generates a new state estimate to complete the set of predicted states. Excluding this new value and considering an accurate model and an acceptable level of noise, the difference between the previous and the current set of state values should be negligible.
3. Motion Planning and Control Solution Design
3.1. Plant Modeling
3.1.1. Kinematic Model
3.1.2. Dynamic Model
- as the output, that is the rotational velocity either for the right motor or for the left motor and
- as the input, that is the control signal, regardless of the motor, or .
3.2. Extended Kalman Filter, Including an h-Step-Ahead State Prediction Stage
- Prediction of the next state and propagation of the covariance :, where and , being the expectation, and where and are Jacobian matrices computed in order to linearize respectively the process model about the current state and about the process noise:
- Prediction of the future output and computation of the Kalman filter gain :where and are Jacobian matrices calculated in order to linearize respectively the output model about the predicted next state and about the measurement noise:
- Correction of the state and correction of the covariance :
- The state corrected in (13) was used, together with the kinematic reference , by the path tracking algorithm in order to calculate the dynamic reference to be followed by each wheel, . More details about this calculation will be given in Section 3.3.
- From these dynamic references and the corrected rotational velocities , the dynamic controller was able to compute the control signal for the current sensing period. More details about this computation will be provided in Section 3.4.
- Following an open-loop dynamics-based prediction, the non-linear model of the AV in (8) was iterated from the estimated state and the control signal in order to obtain the next state and output estimations, and , respectively:
- Finally, Steps 1–3 were repeated 1 times to compute the rest of the values of the set of estimates .
3.3. Pure Pursuit Path Tracking Algorithm
- Generation of the future reference for the robot, : From the desired kinematic reference and the Look Ahead Distance (LAD), the nearest point to the future path tracking that was located far away from the LAD was calculated.
- Control law computation: From and the position and orientation estimate provided by the EKF, , the control law was computed by using (18), and then, was calculated for each wheel by using (19), requiring a desired . Finally, from these data, could be calculated:where b was previously defined as half of the distance between the wheels and and as the radius of each wheel.
3.4. Dual-Rate Controller
- A slow-rate sub-controller: .
- A digital hold: .
- A fast-rate sub-controller: .
4. Cost Indexes for Control Performance
- , which is based on the -norm, and its goal is to provide a measure about how accurately the path was followed:where l is the number of iterations required by the AV to reach the final point of the path, is the current AV position, and is the nearest kinematic position reference to the current AV position.
- , which is based on the -norm and is defined to know the maximum difference between the desired path and the current AV position:
- , which measures the total amount of time (in seconds) elapsed to arrive at the final destination:
5. Application
5.1. Data
- The AV was a Lego robot with two wheel motors (shown in Figure 4). Considering a similar model for both motors, the dynamic model for the relation between rotational velocity of the wheel and control signal is:where the output is in rad/s and the input in V. From (26), the consequent state space realization (4) can be obtained in order to be used in (7) to calculate the rotational velocities and then the rest of the elements of the state estimated by the EKF and the h-step-ahead state prediction stage.
- As typical in Ethernet environments [47], a generalized exponential distribution for the time-varying network-induced delays was assumed, in this case being the maximum time delay = 0.17 s. In order to avoid packet disorder, the sampling time was chosen to be = 0.2 s.
- From (26) and following classical procedures [48,49], a PI controller can be designed in order to achieve certain specifications. Taking into consideration this typical PI configuration:the controller’s gains will be tuned such as = 6 and = 0.12. In order to obtain a satisfactory control performance, the actuation period was selected to be T = 0.1 s, and hence, the multiplicity was N = 2. From these values and the discretization of (26) in period T, a dual-rate PI controller can be designed by means of (21) and (22), bringing about:
- For the comparison between dual-rate and single-rate control approaches, the continuous-time PI controller in (27) was discretized in the different periods T and . The single-rate controllers are:
- The control solution was evaluated under different levels of noise in order to study the effect of the process and sensor noises on the performance. Let us consider a lower level of noise, where both noise signals are multiplied by a lower factor F = 0.1, and a higher level of noise, where F = 0.45. By simulation, it was checked that, from F = 0.45, the robustness of the control proposal may be compromised.
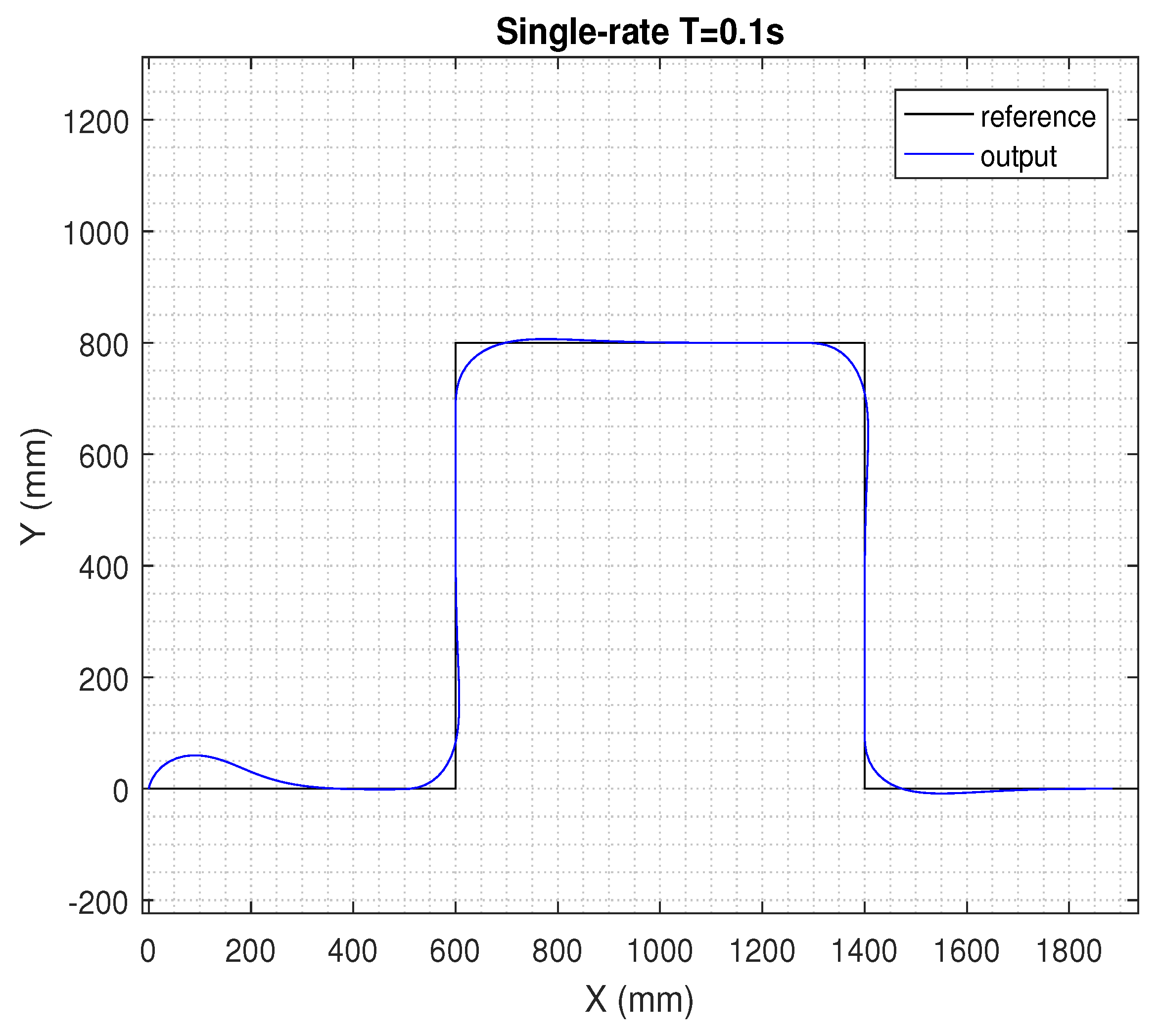
- Finally, the reference to be followed included a sequence of four right angles.
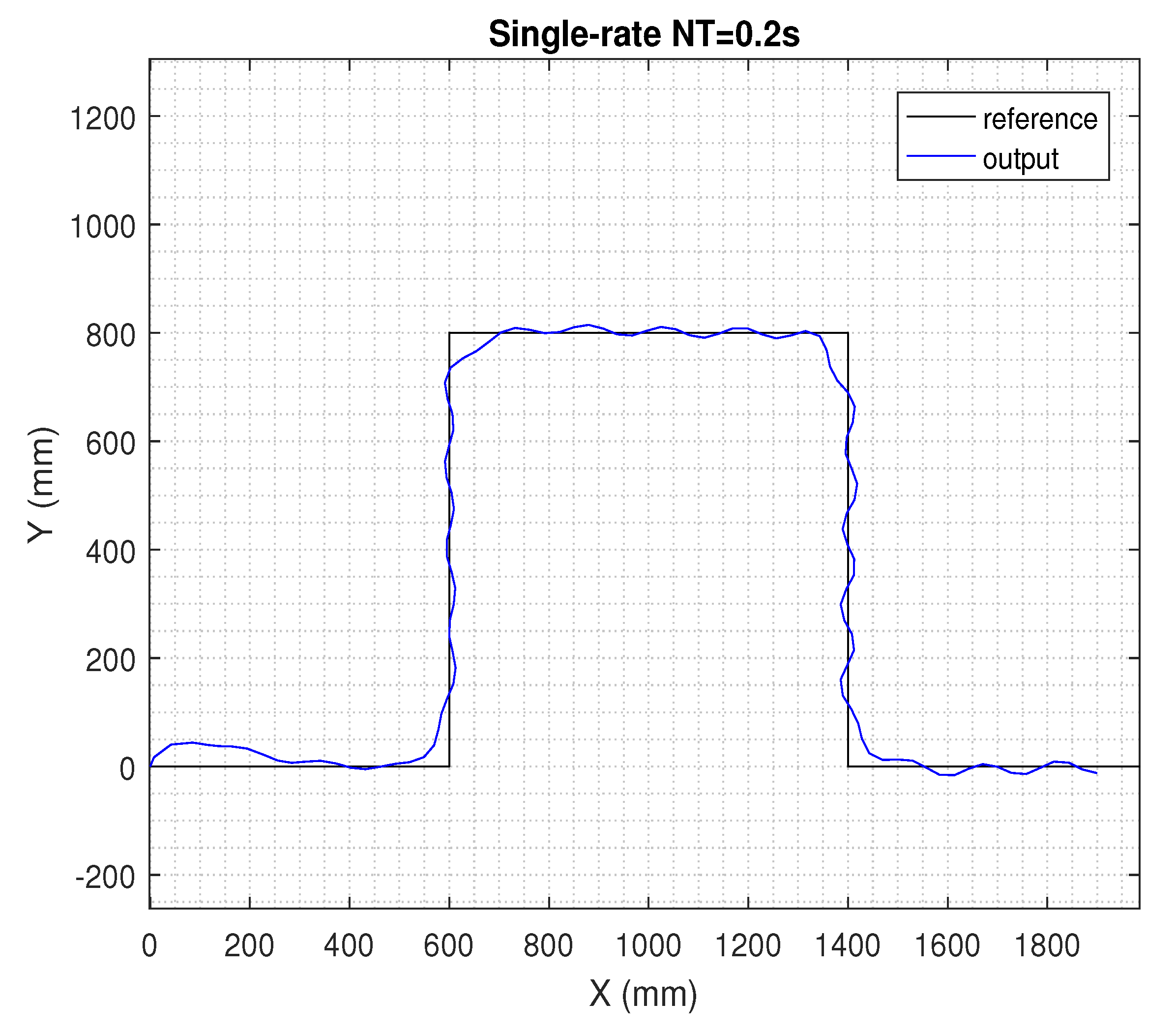
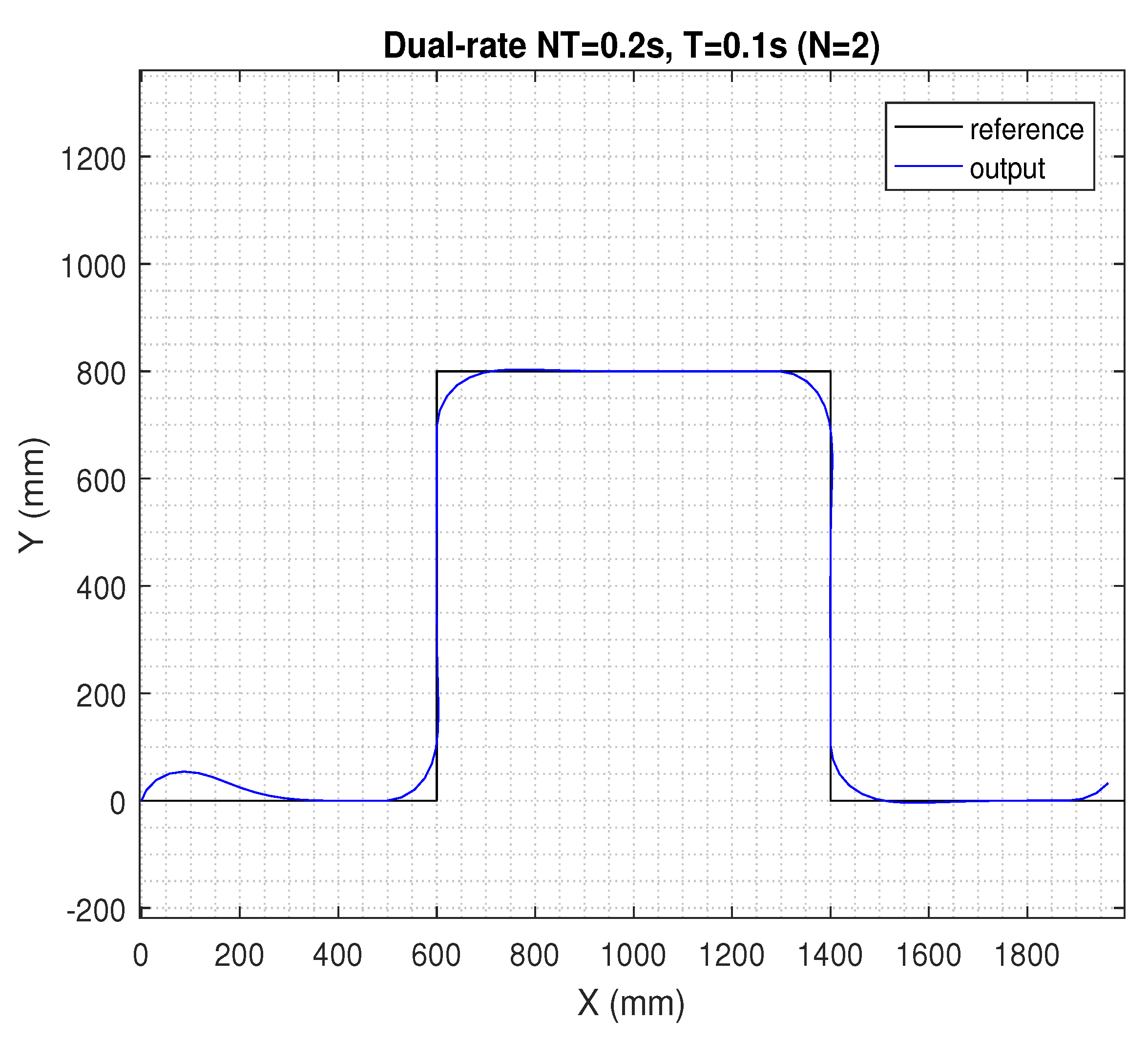
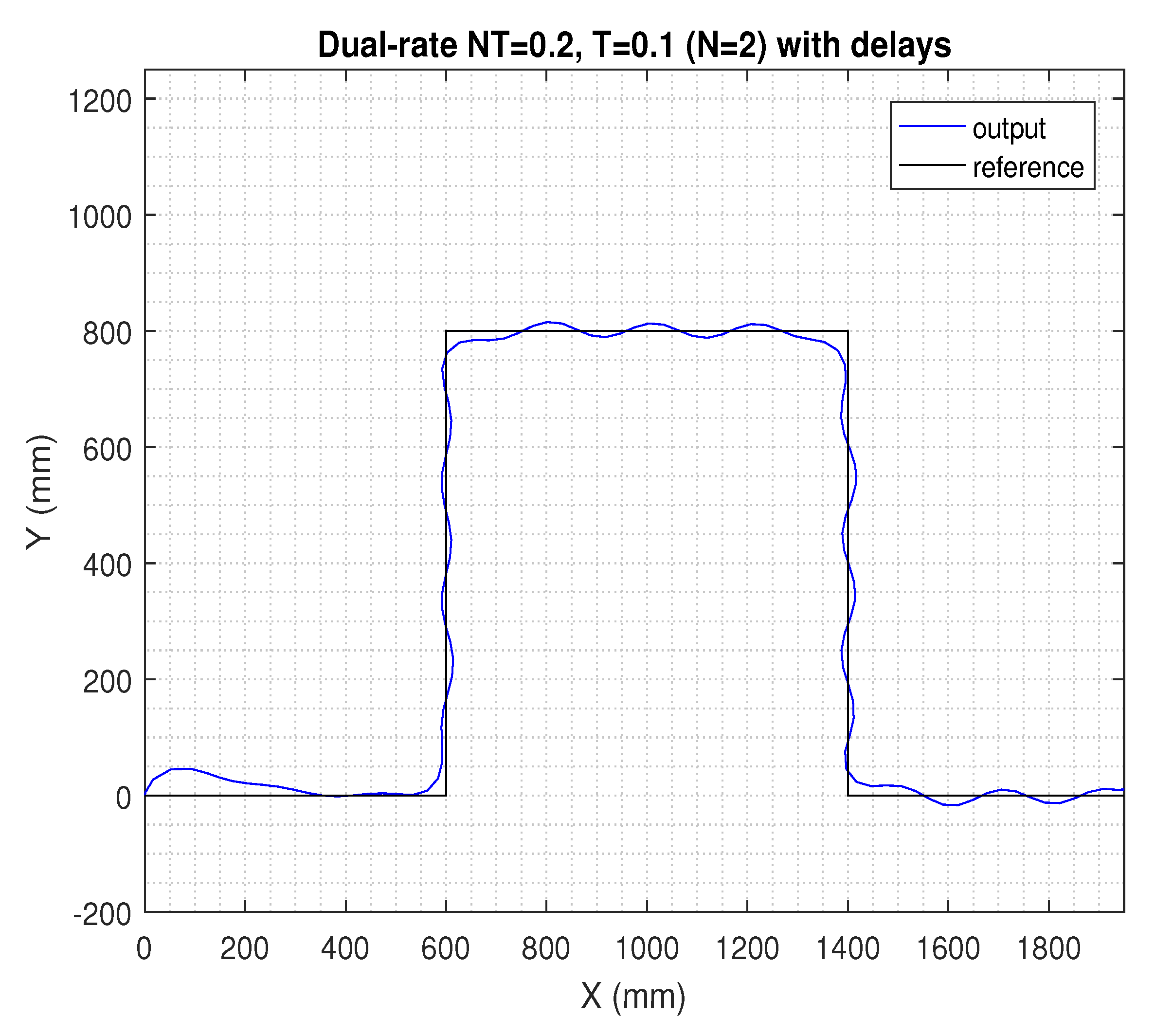
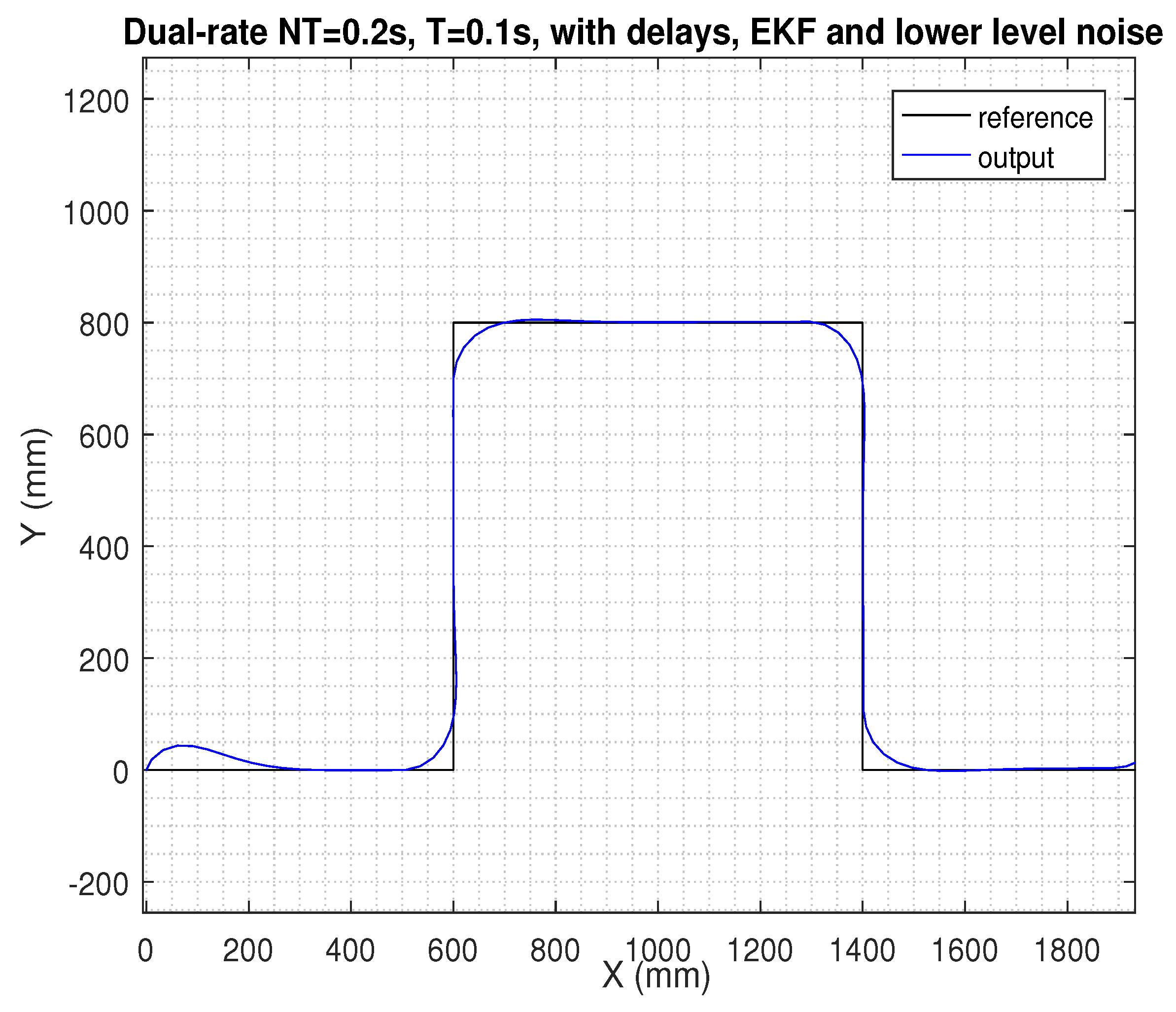
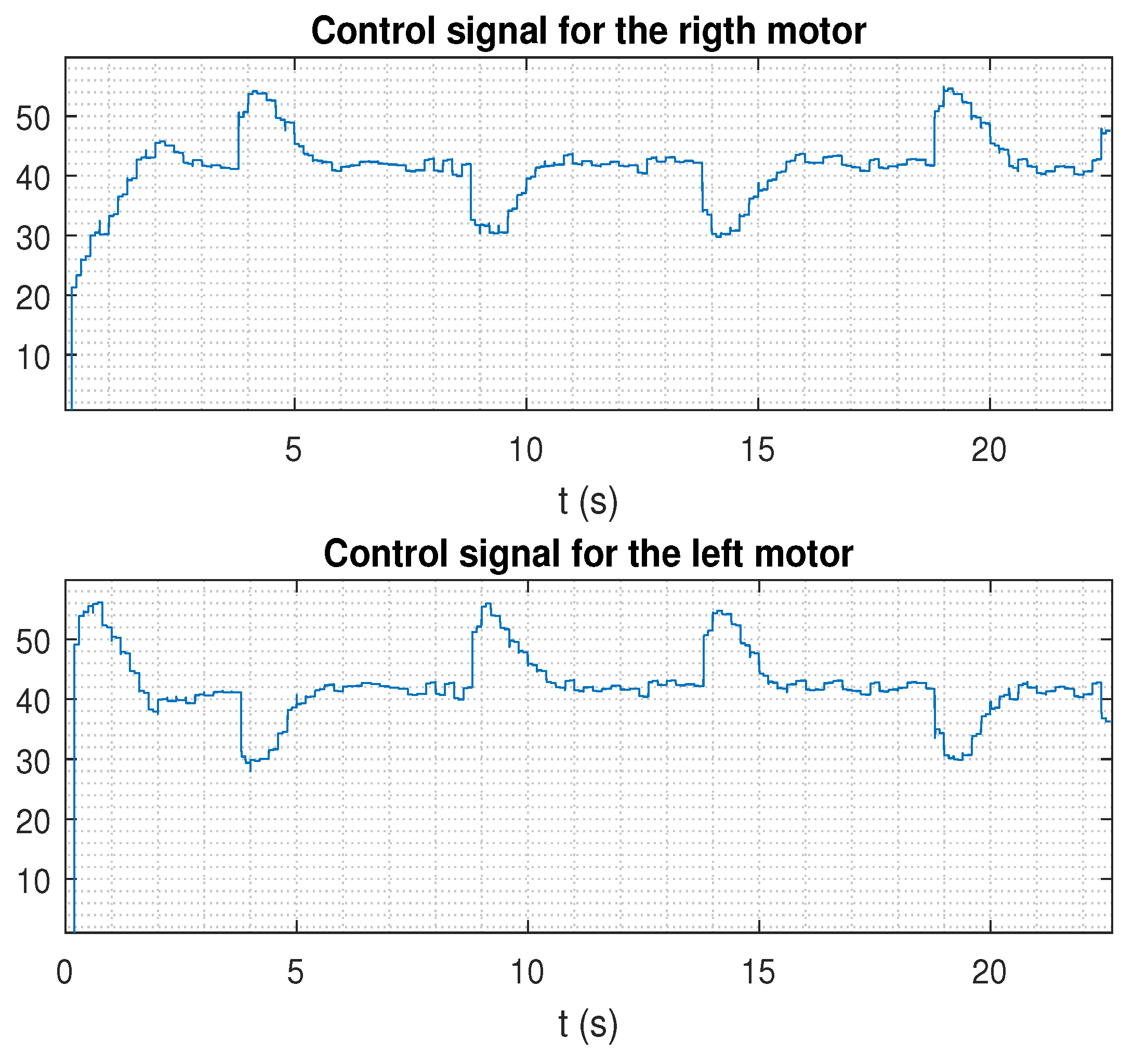
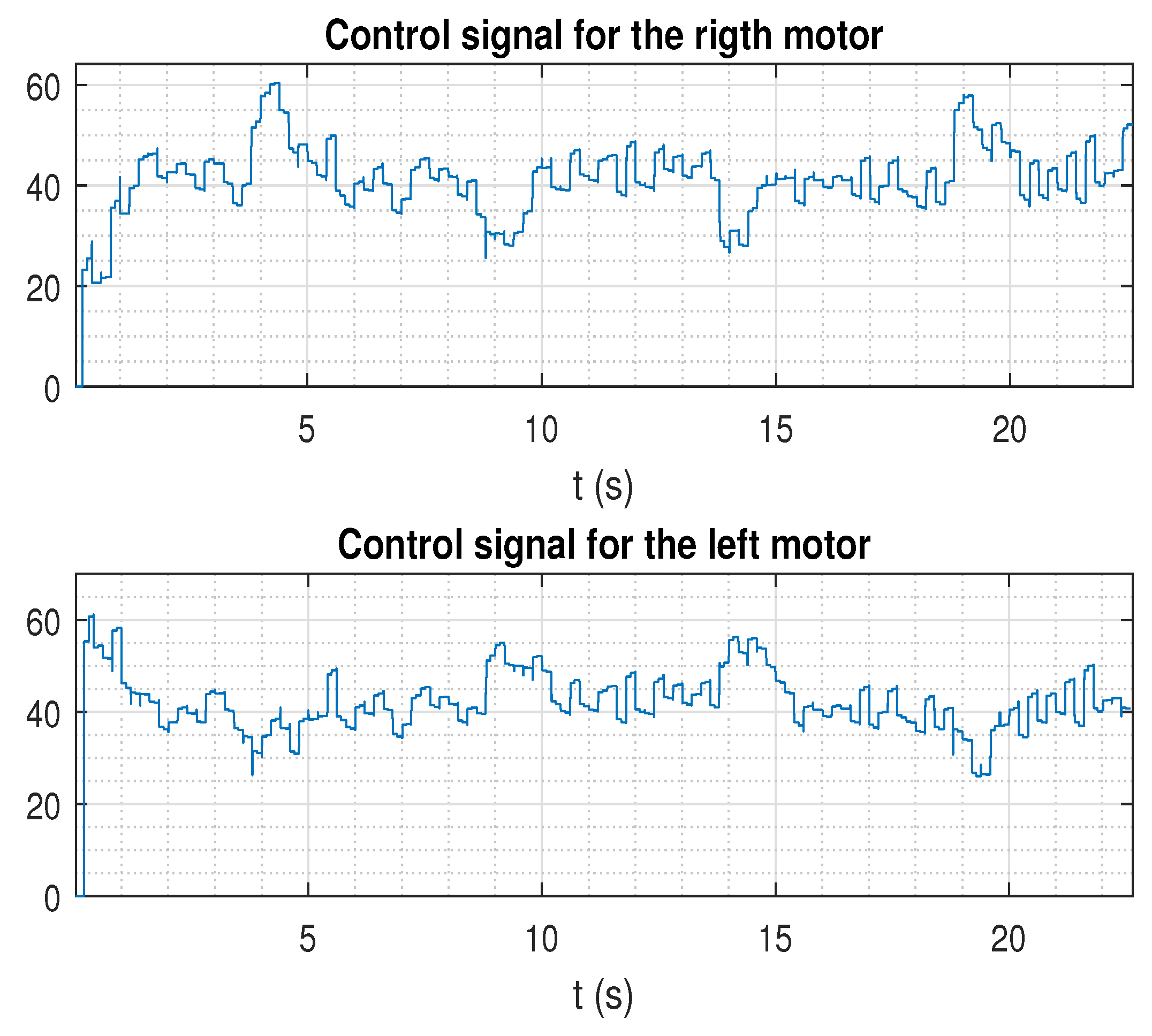
5.2. Results
- a: single-rate control scenario in period T.
- b: single-rate control scenario in period .
- c: dual-rate control scenario.
- d: dual-rate control scenario with delays.
- e: dual-rate control scenario, adding EKF, h-step-ahead prediction stage, and packet-based control. Delays and a lower level of noise were considered.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AV | Autonomous Vehicle |
| IMU | Inertial Measurement Unit |
| EKF | Extended Kalman Filter |
| ZOH | Zero Order Hold |
| LAD | Look Ahead Distance |
References
- Gupta, R.A.; Chow, M.Y. Networked control system: Overview and research trends. IEEE Trans. Ind. Electron. 2010, 57, 2527–2535. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, H.; Kaynak, O. Network-induced constraints in networked control systems: A survey. IEEE Trans. Ind. Inform. 2013, 9, 403–416. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Yu, X. Survey on recent advances in networked control systems. IEEE Trans. Ind. Inform. 2016, 12, 1740–1752. [Google Scholar] [CrossRef]
- Zhang, D.; Shi, P.; Wang, Q.G.; Yu, L. Analysis and synthesis of networked control systems: A survey of recent advances and challenges. ISA Trans. 2017, 66, 376–392. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.B.; Liu, G.P.; Kang, Y.; Yu, L. Exploring the Different Delay Effects in Different Channels in Networked Control Systems. In Packet-Based Control for Networked Control Systems; Springer: Singapore, 2018; pp. 99–113. [Google Scholar]
- Zhang, W.; Tomizuka, M.; Wu, P.; Wei, Y.H.; Leng, Q.; Han, S.; Mok, A.K. A double disturbance observer design for compensation of unknown time delay in a wireless motion control system. IEEE Trans. Control Syst. Technol. 2018, 26, 675–683. [Google Scholar] [CrossRef]
- Cuenca, A.; Antunes, D.J.; Castillo, A.; García, P.; Khashooei, B.A.; Heemels, W. Periodic event-triggered sampling and dual-rate control for a wireless networked control system with applications to UAVs. IEEE Trans. Ind. Electron. 2019, 66, 3157–3166. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L. Event-triggered dynamic output feedback control for networked control systems. IET Control Theory Appl. 2014, 8, 226–234. [Google Scholar] [CrossRef]
- Sargolzaei, A.; Yen, K.K.; Abdelghani, M.N. Preventing time-delay switch attack on load frequency control in distributed power systems. IEEE Trans. Smart Grid 2015, 7, 1176–1185. [Google Scholar] [CrossRef]
- Sargolzaei, A.; Yen, K.K.; Abdelghani, M.N.; Sargolzaei, S.; Carbunar, B. Resilient design of networked control systems under time delay switch attacks, application in smart grid. IEEE Access 2017, 5, 15901–15912. [Google Scholar] [CrossRef]
- Zhang, W.; Bae, J.; Tomizuka, M. Modified preview control for a wireless tracking control system with packet loss. IEEE/ASME Trans. Mechatron. 2015, 20, 299–307. [Google Scholar] [CrossRef]
- Wang, Y.L.; Han, Q.L. Network-based modelling and dynamic output feedback control for unmanned marine vehicles in network environments. Automatica 2018, 91, 43–53. [Google Scholar] [CrossRef]
- Alcaina, J.; Cuenca, A.; Salt, J.; Casanova, V.; Pizá, R. Delay-independent dual-rate PID controller for a packet-based networked control system. Inf. Sci. 2019, 484, 27–43. [Google Scholar] [CrossRef]
- Liu, A.; Zhang, W.; Chen, B.; Yu, L. Networked filtering with Markov transmission delays and packet disordering. IET Control Theory Appl. 2017, 12, 687–693. [Google Scholar] [CrossRef]
- Liu, A.; Zhang, W.; Yu, L.; Liu, S.; Chen, M.Z. New results on stabilization of networked control systems with packet disordering. Automatica 2015, 52, 255–259. [Google Scholar] [CrossRef] [Green Version]
- Lian, B.; Zhang, Q.; Li, J. Sliding mode control and sampling rate strategy for Networked control systems with packet disordering via Markov chain prediction. ISA Trans. 2018, 83, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Cheng, L.L.; Zhan, X.S.; Wu, J.; Han, T. An Optimal Tracking Performance of MIMO NCS with Quantization and Bandwidth Constraints. Asian J. Control 2019, 21, 1–12. [Google Scholar] [CrossRef]
- Julio, R.E.; Bastos, G.S. A ROS package for dynamic bandwidth management in multi-robot systems. In Robot Operating System (ROS); Springer: Cham, Switzerland, 2017; pp. 309–341. [Google Scholar]
- Casanova, V.; Salt, J.; Cuenca, A.; Piza, R. Networked Control Systems: control structures with bandwidth limitations. Int. J. Syst. Control Commun. 2009, 1, 267–296. [Google Scholar] [CrossRef]
- Lozano-Perez, T. Autonomous Robot Vehicles; Springer: Secaucus, NJ, USA, 2012. [Google Scholar]
- Gámez Serna, C.; Ruichek, Y. Dynamic speed adaptation for path tracking based on curvature information and speed limits. Sensors 2017, 17, 1383. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Clavijo, M.; Jiménez, F.; Gomez, O.; Rivera, J.L.; Anguita, M. Autonomous vehicle for surveillance missions in off-road environment. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 98–103. [Google Scholar]
- Vaquero, V.; Repiso, E.; Sanfeliu, A. Robust and real-time detection and tracking of moving objects with minimum 2D LIDAR information to advance autonomous cargo handling in ports. Sensors 2019, 19, 107. [Google Scholar] [CrossRef]
- Chen, J.; Zhan, W.; Tomizuka, M. Autonomous Driving Motion Planning with Constrained Iterative LQR. IEEE Trans. Intell. Veh. 2019, 4, 244–254. [Google Scholar] [CrossRef]
- Hellstrom, T.; Ringdahl, O. Follow the Past: a path-tracking algorithm for autonomous vehicles. Int. J. Veh. Auton. Syst. 2006, 4, 216–224. [Google Scholar] [CrossRef]
- Li, Z.; Wang, B.; Gong, J.; Gao, T.; Lu, C.; Wang, G. Development and Evaluation of Two Learning-Based Personalized Driver Models for Pure Pursuit Path-Tracking Behaviors. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 79–84. [Google Scholar]
- Lundgren, M. Path Tracking and Obstacle Avoidance for a Miniature Robot. Master’s Thesis, Umeå University, Umeå, Sweden, 2003. [Google Scholar]
- Falcone, P.; Borrelli, F.; Tseng, H.E.; Asgari, J.; Hrovat, D. A hierarchical model predictive control framework for autonomous ground vehicles. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 3719–3724. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Haykin, S. Kalman Filtering and Neural Networks; Wiley Online Library: New York, NY, USA, 2001. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina: Chapel Hill, NC, USA, 2006; Volume 378. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: New York, NY, USA, 2006. [Google Scholar]
- Zhang, X.M.; Han, Q.L. Network-based H∞ filtering using a logic jumping-like trigger. Automatica 2013, 49, 1428–1435. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, W.; Tomizuka, M. Extended kalman filtering for robot joint angle estimation using mems inertial sensors. IFAC Proc. Vol. 2013, 46, 406–413. [Google Scholar] [CrossRef]
- Zhao, Y.B.; Liu, G.P.; Rees, D. Design of a packet-based control framework for networked control systems. IEEE Trans. Control Syst. Technol. 2009, 17, 859–865. [Google Scholar] [CrossRef]
- Cuenca, A.; Alcaina, J.; Salt, J.; Casanova, V.; Pizá, R. A packet-based dual-rate PID control strategy for a slow-rate sensing Networked Control System. ISA Trans. 2018, 76, 155–166. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Salt, J.; Albertos, P. Model-Based Multirate Controllers Design. IEEE Trans. Control Syst. Technol. 2005, 13, 988–997. [Google Scholar] [CrossRef]
- Salt, J.; Cuenca, Á.; Palau, F.; Dormido, S. A Multirate Control Strategy to the Slow Sensors Problem: An Interactive Simulation Tool for Controller Assisted Design. Sensors 2014, 14, 4086–4110. [Google Scholar] [CrossRef] [Green Version]
- Mansano, R.; Godoy, E.; Porto, A. The benefits of soft sensor and multi-rate control for the implementation of wireless networked control systems. Sensors 2014, 14, 24441–24461. [Google Scholar] [CrossRef]
- Tomizuka, M. Multi-rate control for motion control applications. In Proceedings of the 8th IEEE International Workshop on Advanced Motion Control, Kawasaki, Japan, 28 March 2004; pp. 21–29. [Google Scholar]
- Bolot, J.C. End-to-end packet delay and loss behavior in the Internet. In ACM SIGCOMM Computer Communication Review; ACM: New York, NY, USA, 1993; Volume 23, pp. 289–298. [Google Scholar]
- Cervin, A.; Henriksson, D.; Lincoln, B.; Eker, J.; Arzen, K.E. How does control timing affect performance? Analysis and simulation of timing using Jitterbug and TrueTime. IEEE Control Syst. 2003, 23, 16–30. [Google Scholar] [Green Version]
- Cooklev, T.; Eidson, J.C.; Pakdaman, A. An implementation of IEEE 1588 over IEEE 802.11 b for synchronization of wireless local area network nodes. IEEE Trans. Instrum. Meas. 2007, 56, 1632–1639. [Google Scholar] [CrossRef]
- Fukao, T.; Nakagawa, H.; Adachi, N. Adaptive tracking control of a nonholonomic mobile robot. IEEE Trans. Robot. Autom. 2000, 16, 609–615. [Google Scholar] [CrossRef]
- Khargonekar, P.; Poolla, K.; Tannenbaum, A. Robust control of linear time-invariant plants using periodic compensation. IEEE Trans. Autom. Control 1985, 30, 1088–1096. [Google Scholar] [CrossRef]
- Cuenca, Á.; Ojha, U.; Salt, J.; Chow, M.Y. A non-uniform multi-rate control strategy for a Markov chain-driven Networked Control System. Inf. Sci. 2015, 321, 31–47. [Google Scholar] [CrossRef] [Green Version]
- Tipsuwan, Y.; Chow, M. Gain scheduler middleware: A methodology to enable existing controllers for networked control and teleoperation-part I: networked control. IEEE Trans. Ind. Electron. 2004, 51, 1218–1227. [Google Scholar] [CrossRef]
- Ogata, K. Discrete-Time Control Systems; Prentice Hall: Englewood Cliffs, NJ, USA, 1995; Volume 2. [Google Scholar]
- Astrom, K.; Hagglund, T. PID Controllers: Theory, Design, and Tuning; Instrument Society of America: Research Triangle Park, NC, USA, 1995; pp. 80–81. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k | ||
|---|---|---|
| 0 | ||
| 1 | ||
| 2 | ||
| 3 |
| Index | a | b | c | d | e |
|---|---|---|---|---|---|
| 1043.4 | 1671.8 | 1029.9 | 1684.4 | 1030.0 | |
| 38.76 | 44.55 | 38.33 | 44.33 | 38.97 | |
| 22.0 s | 22.4 s | 22.0 s | 21.6 s | 21.6 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cuenca, Á.; Zhan, W.; Salt, J.; Alcaina, J.; Tang, C.; Tomizuka, M. A Remote Control Strategy for an Autonomous Vehicle with Slow Sensor Using Kalman Filtering and Dual-Rate Control. Sensors 2019, 19, 2983. https://doi.org/10.3390/s19132983
Cuenca Á, Zhan W, Salt J, Alcaina J, Tang C, Tomizuka M. A Remote Control Strategy for an Autonomous Vehicle with Slow Sensor Using Kalman Filtering and Dual-Rate Control. Sensors. 2019; 19(13):2983. https://doi.org/10.3390/s19132983
Chicago/Turabian StyleCuenca, Ángel, Wei Zhan, Julián Salt, José Alcaina, Chen Tang, and Masayoshi Tomizuka. 2019. "A Remote Control Strategy for an Autonomous Vehicle with Slow Sensor Using Kalman Filtering and Dual-Rate Control" Sensors 19, no. 13: 2983. https://doi.org/10.3390/s19132983
APA StyleCuenca, Á., Zhan, W., Salt, J., Alcaina, J., Tang, C., & Tomizuka, M. (2019). A Remote Control Strategy for an Autonomous Vehicle with Slow Sensor Using Kalman Filtering and Dual-Rate Control. Sensors, 19(13), 2983. https://doi.org/10.3390/s19132983