Performance Analysis of Time Synchronization Protocols in Wireless Sensor Networks


Abstract
:1. Introduction
- A comprehensive study of the performance of time synchronization protocols under diverse factors is performed. The effects of these factors on FTSP and GTSP were analyzed to understand the behavior of time synchronization protocols. The simulation methods used can be applied to the evaluation of future protocols.
- We propose an enhancement of FTSP (E-FTSP) and evaluate its advantages. We explain the problem with FTSP caused by the accumulation of jitter and describe how our improvement minimizes it. The simulation results prove that E-FTSP improves upon the performance of FTSP significantly, especially in large-scale multi-hop networks.
2. Related Works
3. Time Synchronization in WSNs
3.1. Problem and Challenge
3.2. Flood Time Synchronization Protocol
3.3. Gradient Time Synchronization Protocol
4. Simulation Setup
5. Evaluation Result
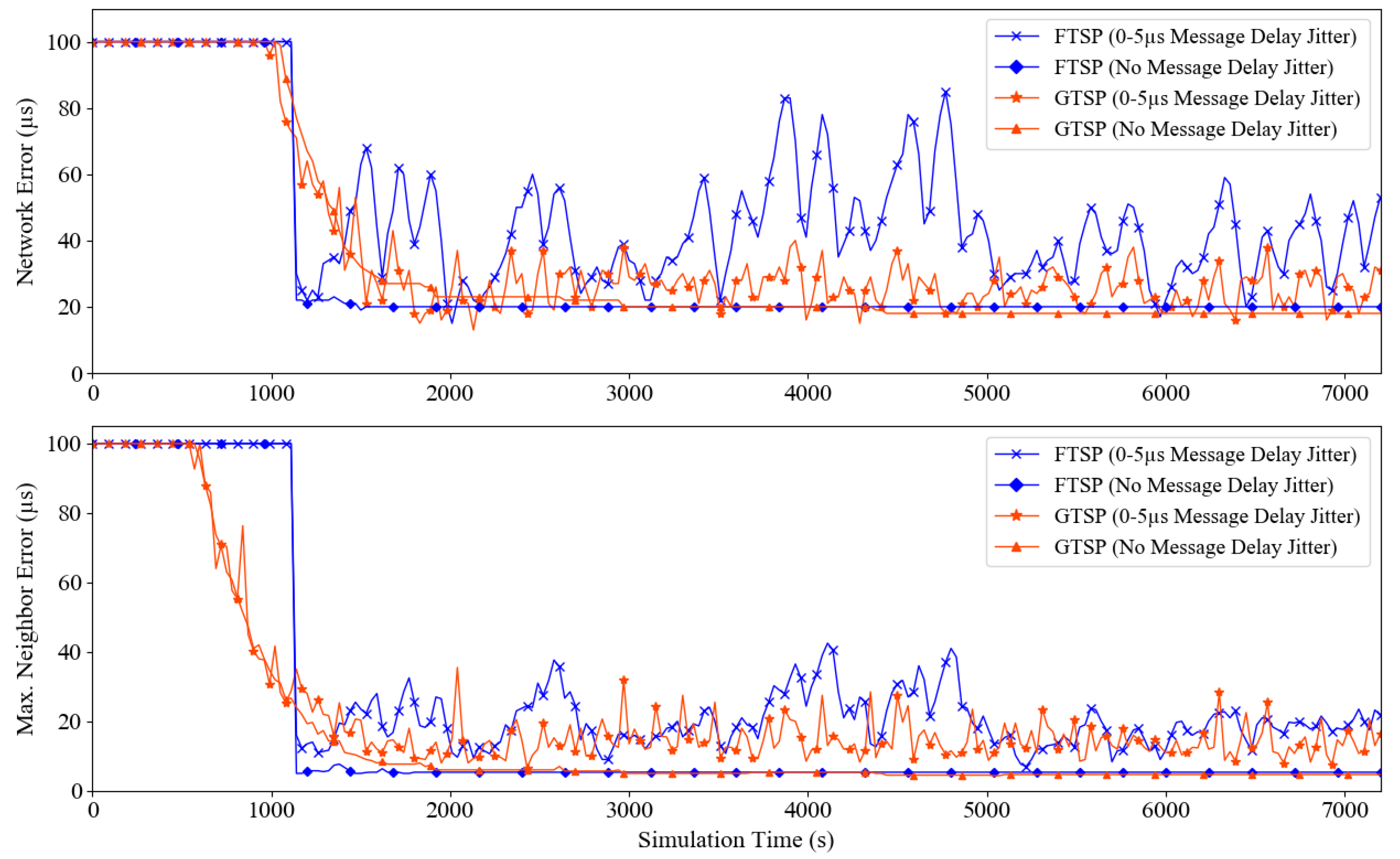
5.1. Effect of Message Delay Jitter
5.1.1. Simulation Results
5.1.2. Enhanced FTSP (E-FTSP)
- If offsetError is smaller than estimatedDelay, the nodes will regard the previous compensated drift as sufficient and a recalculation will not be performed. In this case, the node must only compensate for the offset (see lines 3–5 in Algorithm 1).
- Meanwhile, if offsetError is larger than estimatedDelay, the nodes must calculate and compensate for the clock drift and clock offset using the algorithm of the original FTSP (see lines 7–9 in Algorithm 1).
| Algorithm 1 Procedure to handle received message in E-FTSP |
|
5.2. Effect of Synchronization Period
5.3. Effect of Topology
5.3.1. Position of Reference Node in FTSP
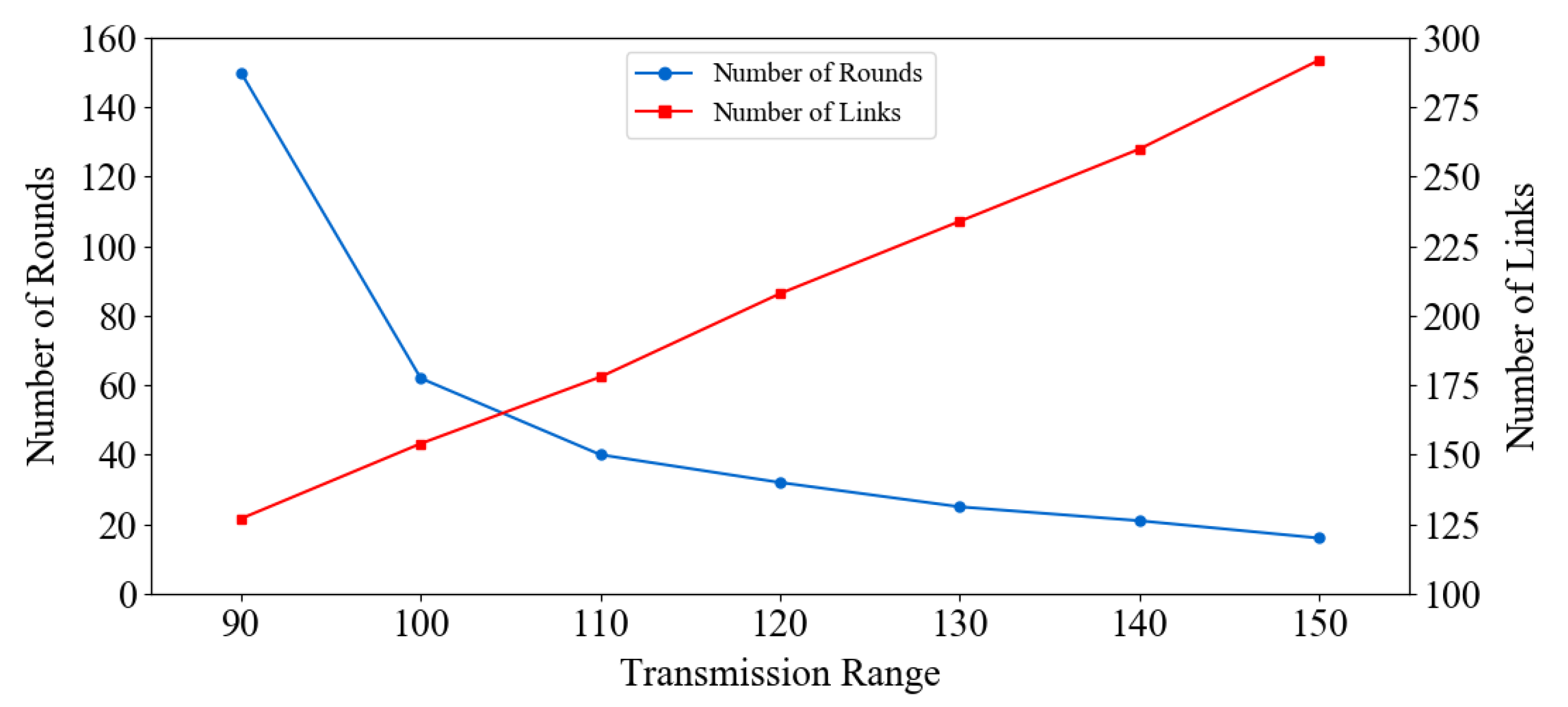
5.3.2. Distribution of Nodes in GTSP
5.3.3. Large-Scale Network
5.4. Effect of Packet Loss
6. Conclusions
- Message delay jitter can be considered to be the primary factor affecting the performance of time synchronization protocols. In particular, it causes fluctuations in the clock skew through multi-hop flooding and reduces the accuracy of FTSP significantly. An extended version of FTSP (E-FTSP) was proposed to reduce the effect of message delay jitter and it demonstrated outstanding performance compared to FTSP and GTSP, especially in a large-scale network.
- Regarding network topology, the position of the reference node affects the convergence time and synchronization error of FTSP and E-FTSP. In detail, the hop distance from the farthest node(s) should be as small as possible to achieve a high performance in FTSP and E-FTSP. Meanwhile, the distribution of nodes, especially the number of links between nodes in the network, affects the convergence time of GTSP. In detail, the convergence speed of GTSP increases with the number of links. In a small-scale network, there is no significant difference between the aforementioned protocols in term of synchronization error and convergence time. However, in a large-scale multi-hop network, FTSP has huge synchronization error, and GTSP has very slow convergence time. Meanwhile, E-FTSP provides more accurate and faster time synchronization regardless of network scale.
- Changing the synchronization period (interval) does not reduce the synchronization errors of FTSP and GTSP. A short synchronization period slightly increases the synchronization error in FTSP. Interestingly, a short synchronization period reduces the number of rounds required to achieve convergence in GTSP. Time synchronization protocols require short intervals for fast synchronization and long intervals to save energy. Therefore, adaptive synchronization protocols should be further investigated.
- Packet loss clearly increases the convergence times and the synchronization errors of FTSP and GTSP. However, the network still achieves a synchronized status even when approximately one third of packets are lost. This proves the robustness of FTSP, GTSP, and E-FTSP.
Author Contributions
Funding
Conflicts of Interest
References
- Maróti, M.; Kusy, B.; Simon, G.; Lédeczi, Á. The flooding time synchronization protocol. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004. [Google Scholar] [CrossRef]
- Ganeriwal, S.; Tsigkogiannis, I.; Shim, H.; Tsiatsis, V.; Srivastava, M.; Ganesan, D. Estimating Clock Uncertainty for Efficient Duty-Cycling in Sensor Networks. IEEE/ACM Trans. Networking 2009, 17, 843–856. [Google Scholar] [CrossRef]
- Akhlaq, M.; Sheltami, T.R. RTSP: An accurate and energy-efficient protocol for clock synchronization in WSNs. IEEE Trans. Instrum. Meas. 2013, 62, 578–589. [Google Scholar] [CrossRef]
- Yildirim, K.S.; Kantarci, A. Time synchronization based on slow-flooding in wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 244–253. [Google Scholar] [CrossRef]
- Yildirim, K.S.; Gurcan, O. Efficient Time Synchronization in a Wireless Sensor Network by Adaptive Value Tracking. IEEE Trans. Wirel. Commun. 2014, 13, 3650–3664. [Google Scholar] [CrossRef] [Green Version]
- Lenzen, C.; Sommer, P.; Wattenhofer, R. PulseSync: An efficient and scalable clock synchronization protocol. IEEE/ACM Trans. Netw. 2015, 23, 717–757. [Google Scholar] [CrossRef]
- Kim, K.S.; Lee, S.; Lim, E.G. Energy-Efficient Time Synchronization Based on Asynchronous Source Clock Frequency Recovery and Reverse Two-Way Message Exchanges in Wireless Sensor Networks. IEEE Trans. Commun. 2017, 65, 347–359. [Google Scholar] [CrossRef]
- Berger, A.; Pichler, M.; Klinglmayr, J.; Pötsch, A.; Springer, A. Low-Complex Synchronization Algorithms for Embedded Wireless Sensor Networks. IEEE Trans. Instrum. Meas. 2015, 64, 1032–1042. [Google Scholar] [CrossRef]
- Gong, F.; Sichitiu, M.L. CESP: A Low-Power High-Accuracy Time Synchronization Protocol. IEEE Trans. Veh. Technol. 2016, 65, 2387–2396. [Google Scholar] [CrossRef]
- Tavares Bruscato, L.; Heimfarth, T.; Pignaton de Freitas, E. Enhancing Time Synchronization Support in Wireless Sensor Networks. Sensors 2017, 17, 2956. [Google Scholar] [CrossRef]
- Sommer, P.; Wattenhofer, R. Gradient Clock Synchronization in Wireless Sensor Networks. In Proceedings of the 2009 International Conference on Information Processing in Sensor Networks, Washington, DC, USA, 13–16 April 2009. [Google Scholar]
- Schenato, L.; Fiorentin, F. Average TimeSynch: A consensus-based protocol for clock synchronization in wireless sensor networks. Automatica 2011, 47, 1878–1886. [Google Scholar] [CrossRef]
- Wu, J.; Jiao, L.; Ding, R. Average time synchronization in wireless sensor networks by pairwise messages. Comput. Commun. 2012, 35, 221–233. [Google Scholar] [CrossRef]
- Lin, L.; Ma, S.; Ma, M. A Group Neighborhood Average Clock Synchronization Protocol for Wireless Sensor Networks. Sensors 2014, 14, 14744–14764. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, J.; Zhang, L.; Bai, Y.; Sun, Y. Cluster-based consensus time synchronization for wireless sensor networks. IEEE Sens. J. 2015, 15, 1404–1413. [Google Scholar] [CrossRef]
- Yildirim, K.S.; Kantarci, A. External gradient time synchronization in wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 633–641. [Google Scholar] [CrossRef]
- He, J.; Cheng, P.; Shi, L.; Chen, J. SATS: Secure average-consensus-based time synchronization in wireless sensor networks. IEEE Trans. Signal Process. 2013, 61, 6387–6400. [Google Scholar] [CrossRef]
- He, J.; Cheng, P.; Shi, L.; Chen, J.; Sun, Y. Time Synchronization in WSNs: A Maximum-Value-Based Consensus Approach. IEEE Trans. Automat. Contr. 2014, 59, 660–675. [Google Scholar] [CrossRef]
- Sun, W.; Strom, E.G.; Brannstrom, F.; Gholami, M.R. Random Broadcast Based Distributed Consensus Clock Synchronization for Mobile Networks. IEEE Trans. Wirel. Commun. 2015, 14, 3378–3389. [Google Scholar] [CrossRef] [Green Version]
- Apicharttrisorn, K.; Choochaisri, S.; Intanagonwiwat, C. Energy-Efficient Gradient Time Synchronization for Wireless Sensor Networks. In Proceedings of the 2010 2nd International Conference on Computational Intelligence, Communication Systems and Networks, Liverpool, UK, 28–30 July 2010. [Google Scholar]
- Maggs, M.K.; O’Keefe, S.G.; Thiel, D.V. Consensus Clock Synchronization for Wireless Sensor Networks. IEEE Sens. J. 2012, 12, 2269–2277. [Google Scholar] [CrossRef]
- Leva, A.; Terraneo, F.; Rinaldi, L.; Papadopoulos, A.V.; Maggio, M. High-Precision Low-Power Wireless Nodes’ Synchronization via Decentralized Control. IEEE Trans. Control Syst. Technol. 2016, 24, 1279–1293. [Google Scholar] [CrossRef]
- Elsharief, M.; Abd El-Gawad, M.A.; Kim, H. Fads: Fast scheduling and accurate drift compensation for time synchronization of wireless sensor networks. IEEE Access 2018, 6, 65507–65520. [Google Scholar] [CrossRef]
- Wu, Y.C.; Chaudhari, Q.; Serpedin, E. Clock Synchronization of Wireless Sensor Networks. IEEE Signal Process. Mag. 2011, 28, 124–138. [Google Scholar] [CrossRef]
- Ranganathan, P.; Nygard, K. Time Synchronization in Wireless Sensor Networks: A Survey. IJU 2010, 1, 92–102. [Google Scholar] [CrossRef] [Green Version]
- Youn, S. A Comparison of Clock Synchronization in Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2013, 9, 532986. [Google Scholar] [CrossRef]
- Bae, S.K. Classification and Analysis of Time Synchronization Protocols for Wireless Sensor Networks in Terms of Power Consumption. In Ubiquitous Information Technologies and Applications; Jeong, Y.S., Park, Y.H., Hsu, C.H., Park, J.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; Volume 80, pp. 221–228. [Google Scholar]
- Sarvghadi, M.A.; Wan, T.C. Message Passing Based Time Synchronization in Wireless Sensor Networks: A Survey. Int. J. Distrib. Sens. Netw. 2016, 12, 1280904. [Google Scholar] [CrossRef]
- Dalwadi, N.; Padole, M. An Insight into Time Synchronization Algorithms in IoT. In Data, Engineering and Applications; Shukla, R.K., Agrawal, J., Sharma, S., Singh Tomer, G., Eds.; Springer: Singapore, 2019; pp. 285–296. [Google Scholar]
- Khalil, A. Current Implementation of the Flooding Time Synchronization Protocol in Wireless Sensor Networks. Ph.D. Thesis, The University of Western Ontario, London, ON, Canada, 2019. [Google Scholar]
- Sommer, P.A. Wireless Embedded Systems: Time, Location, and Applications. Ph.D. Thesis, ETH Zurich, Zürich, Switzerland, 2011. [Google Scholar] [CrossRef]
- Römer, K.; Blum, P.; Meier, L. Time Synchronization and Calibration in Wireless Sensor Networks. In Handb. Sens. Networks; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2005; pp. 199–237. [Google Scholar] [Green Version]
- Elson, J.E. Time Syncronization in Wireless Sensor Networks. Ph.D. Thesis, University of California, Los Angeles, CA, USA, 2003. [Google Scholar]
- Lenzen, C.; Sommer, P.; Wattenhofer, R. Optimal clock synchronization in networks. In Proceedings of the 7th ACM Conference on Embedded Networked Sensor Systems, Berkeley, CA, USA, 4–6 November 2009. [Google Scholar]
- Rowe, A.; Gupta, V.; Rajkumar, R.R. Low-power clock synchronization using electromagnetic energy radiating from AC power lines. In Proceedings of the 7th ACM Conference on Embedded Networked Sensor Systems, Berkeley, CA, USA, 4–6 November 2009. [Google Scholar]
- Hao, T.; Zhou, R.; Xing, G.; Mutka, M.W.; Chen, J. WizSync: Exploiting Wi-Fi Infrastructure for Clock Synchronization in Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2014, 13, 1379–1392. [Google Scholar] [CrossRef]
- Djenouri, D.; Bagaa, M. Synchronization protocols and implementation issues in wireless sensor networks: A review. IEEE Syst. J. 2016, 10, 617–627. [Google Scholar] [CrossRef]
- Elson, J.; Girod, L.; Estrin, D. Fine-grained network time synchronization using reference broadcasts. ACM SIGOPS Oper. Syst. Rev. 2002, 36, 147–163. [Google Scholar] [CrossRef]
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-sync protocol for sensor networks. In Proceedings of the 1st international conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003. [Google Scholar]
- Riverbed. Riverbed Modeler. Available online: https://www.riverbed.com (accessed on 12 June 2019).
- Blum, P.; Meier, L.; Thiele, L. Improved interval-based clock synchronization in sensor networks. In Proceedings of the 3rd International Symposium on Information Processing in Sensor Networks, Berkeley, CA, USA, 26–27 April 2004. [Google Scholar]
- Li, Q.; Rus, D. Global clock synchronization in sensor networks. IEEE Trans. Comput. 2006, 55, 214–226. [Google Scholar] [CrossRef]
- Linh-An, P.; Kim, T.; Kim, T.; Lee, J.; Ham, J.H. Poster Abstract: A Fast Consensus-based Time Synchronization Protocol with Virtual Links in WSNs. IEEE INFOCOM 2019, 1, 1–2. [Google Scholar]
- Bhadra, D.R.; Joshi, C.A.; Soni, P.R.; Vyas, N.P.; Jhaveri, R.H. Packet loss probability in wireless networks: A survey. In Proceedings of the 2015 International Conference on Communications and Signal Processing (ICCSP), Melmaruvathur, India, 2–4 April 2015. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Setting | Value |
|---|---|---|
| Topology | Grid/Random | |
| Number of Nodes | 50 | |
| Transmission Range | 100 m | |
| Network Coverage | 600 m × 600 m | |
| Common | Initial Clock Drift | ±30–100 ppm |
| Synchronization Period | 30 s | |
| Oscillator Frequency | 1 MHz | |
| Simulation Time | 7200 s | |
| Number of Executions (per scenario) | 10 | |
| NUMENTRIES_LIMIT | 4 | |
| FTSP | Initial Root Node ID | 1 |
| Regression Table Size | 8 | |
| GTSP | JUMP_THRESHOLD | 10 µs |
| Index | Local Time | Offset |
|---|---|---|
| 1 | h() | O() |
| 2 | h() | O() |
| 3 | h() | O() |
| 4 | h() | O() |
| 5 | h() | O() |
| 6 | h() | O() |
| 7 | h() | O() |
| 8 | h() | O() |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phan, L.-A.; Kim, T.; Kim, T.; Lee, J.; Ham, J.-H. Performance Analysis of Time Synchronization Protocols in Wireless Sensor Networks. Sensors 2019, 19, 3020. https://doi.org/10.3390/s19133020
Phan L-A, Kim T, Kim T, Lee J, Ham J-H. Performance Analysis of Time Synchronization Protocols in Wireless Sensor Networks. Sensors. 2019; 19(13):3020. https://doi.org/10.3390/s19133020
Chicago/Turabian StylePhan, Linh-An, Taejoon Kim, Taehong Kim, JaeSeang Lee, and Jae-Hyun Ham. 2019. "Performance Analysis of Time Synchronization Protocols in Wireless Sensor Networks" Sensors 19, no. 13: 3020. https://doi.org/10.3390/s19133020
APA StylePhan, L. -A., Kim, T., Kim, T., Lee, J., & Ham, J. -H. (2019). Performance Analysis of Time Synchronization Protocols in Wireless Sensor Networks. Sensors, 19(13), 3020. https://doi.org/10.3390/s19133020