On the Accuracy of Factory-Calibrated Low-Cost Soil Water Content Sensors

 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
2. Materials and Methods
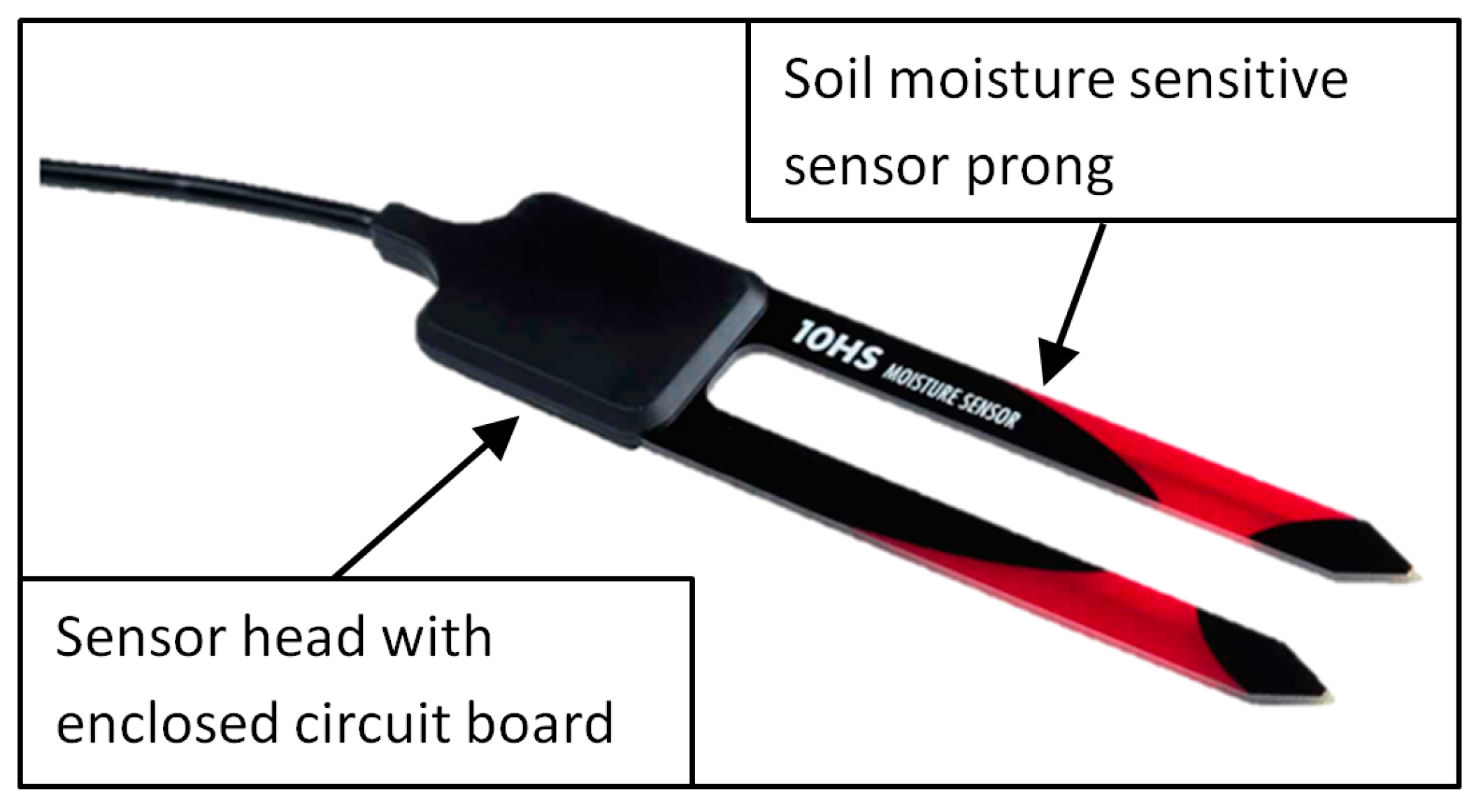
2.1. Sensor Technology
2.2. Study Area
2.3. Laboratory Experiments
2.3.1. Sensor Response—Permittivity Calibration for the 10HS Sensor
2.3.2. Permittivity-Soil Water Content Relationships
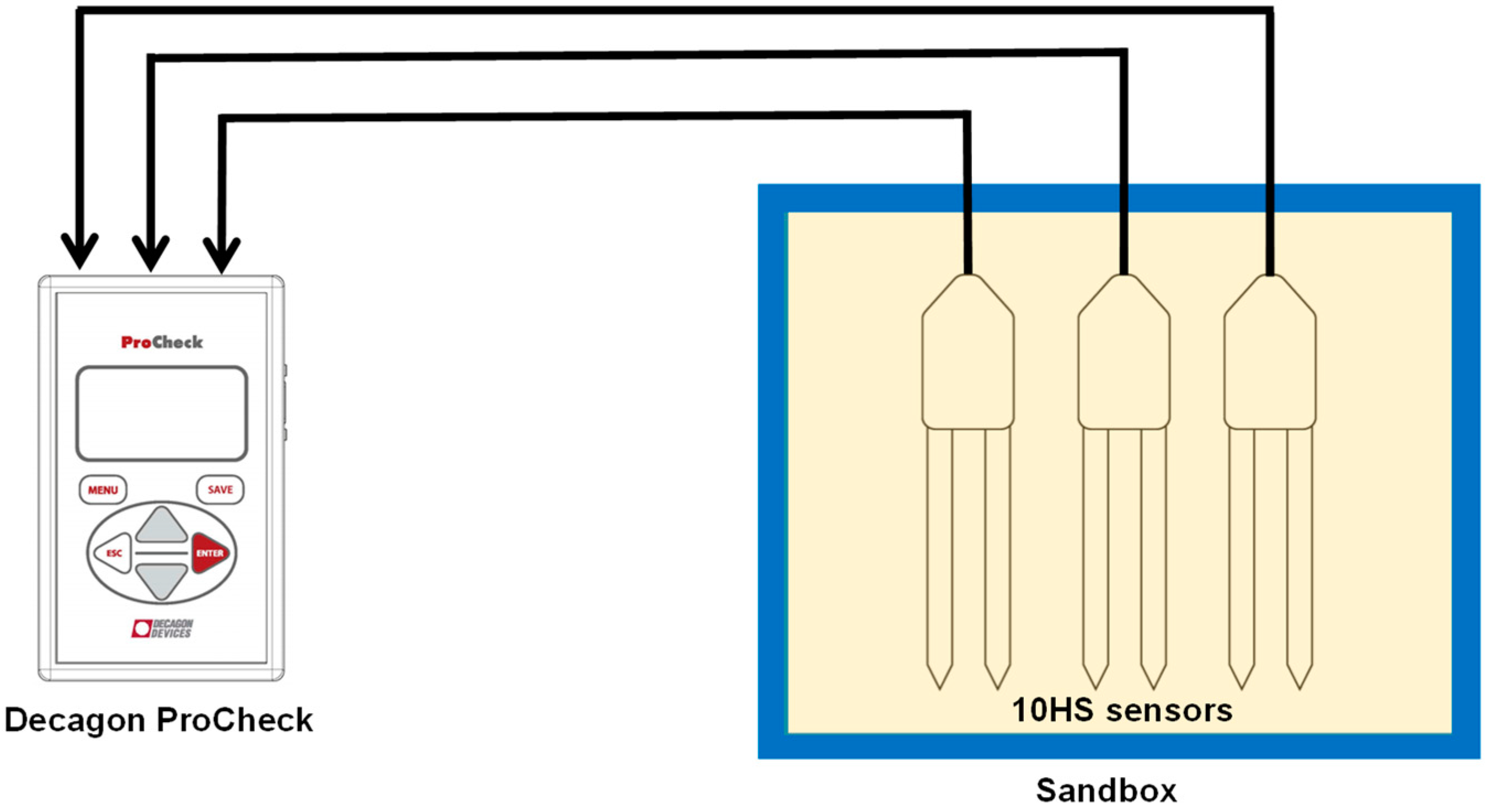
2.3.3. Sandbox Experiment
3. Results and Discussion
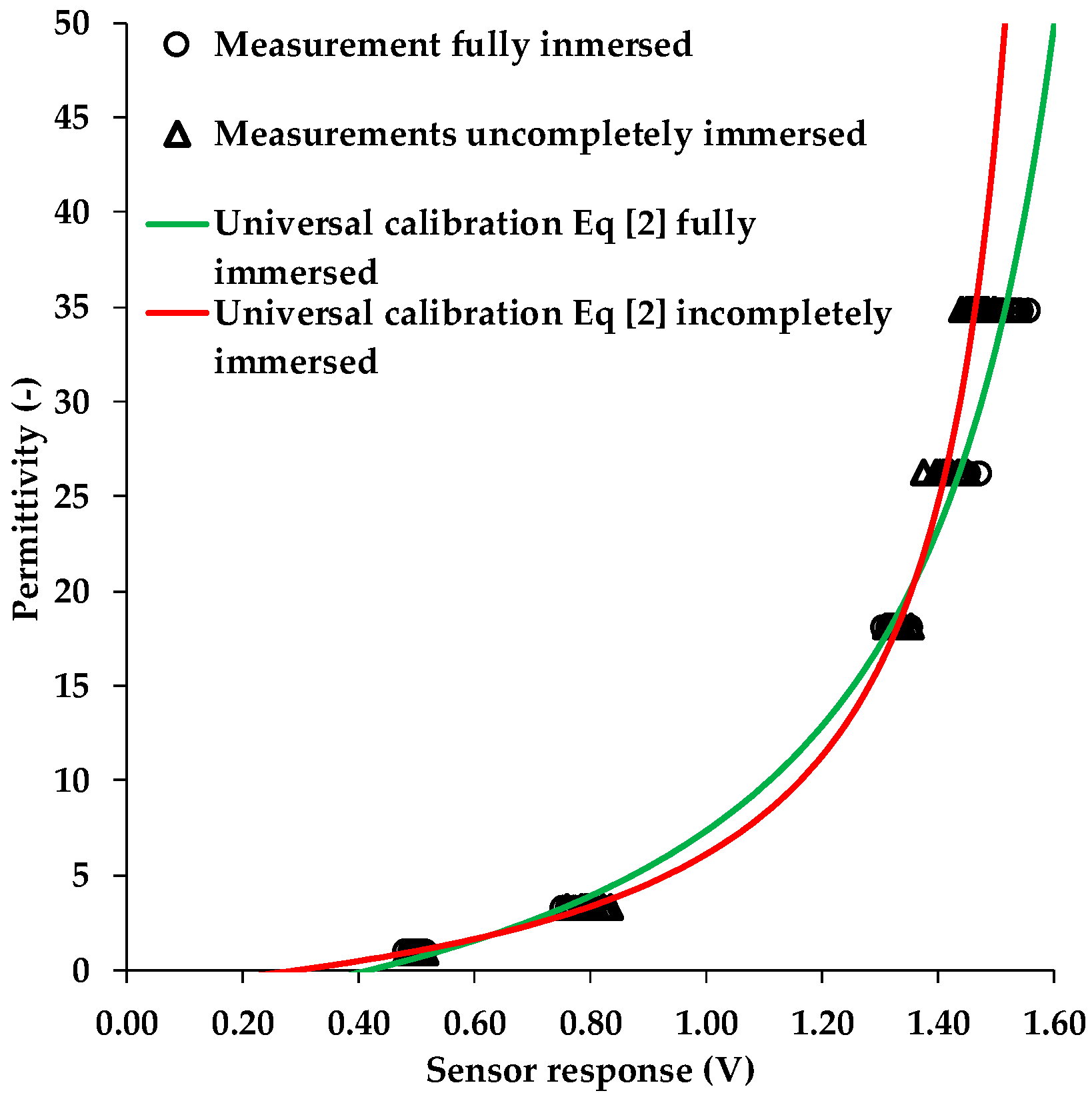
3.1. Sensor Response—Permittivity (SRP) Calibration for the 10HS Sensor
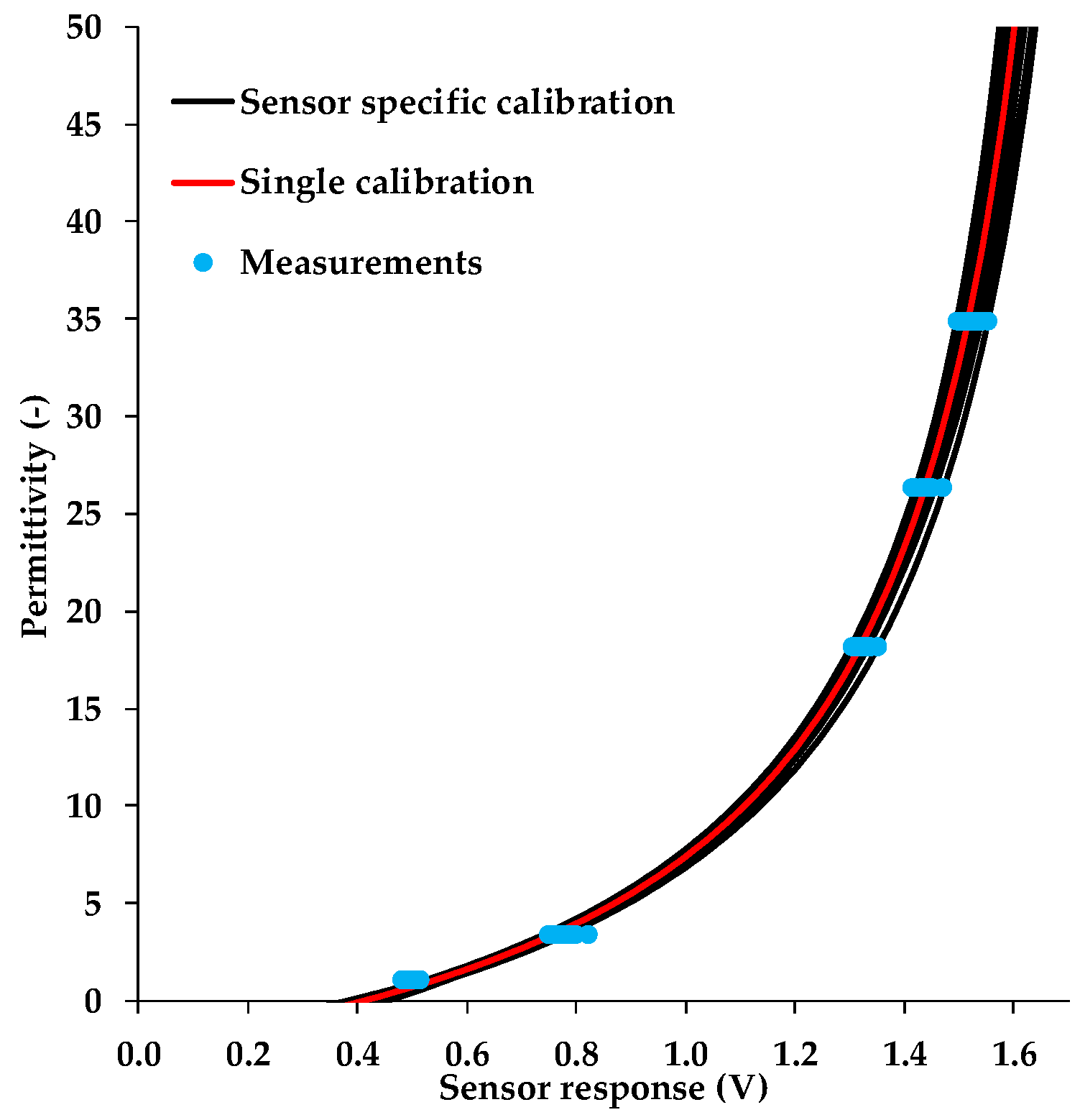
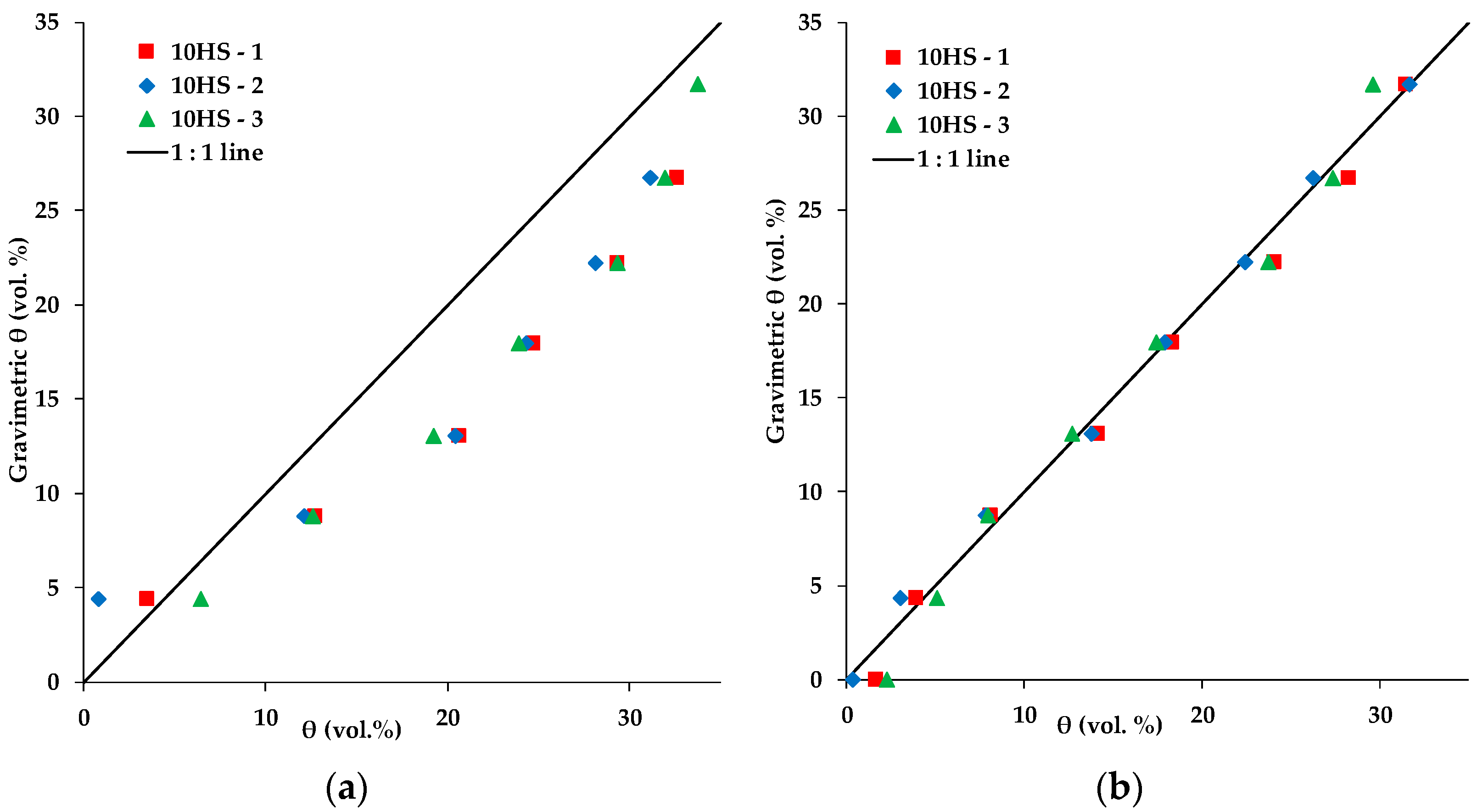
3.2. Universal Versus Sensor—Specific Calibration
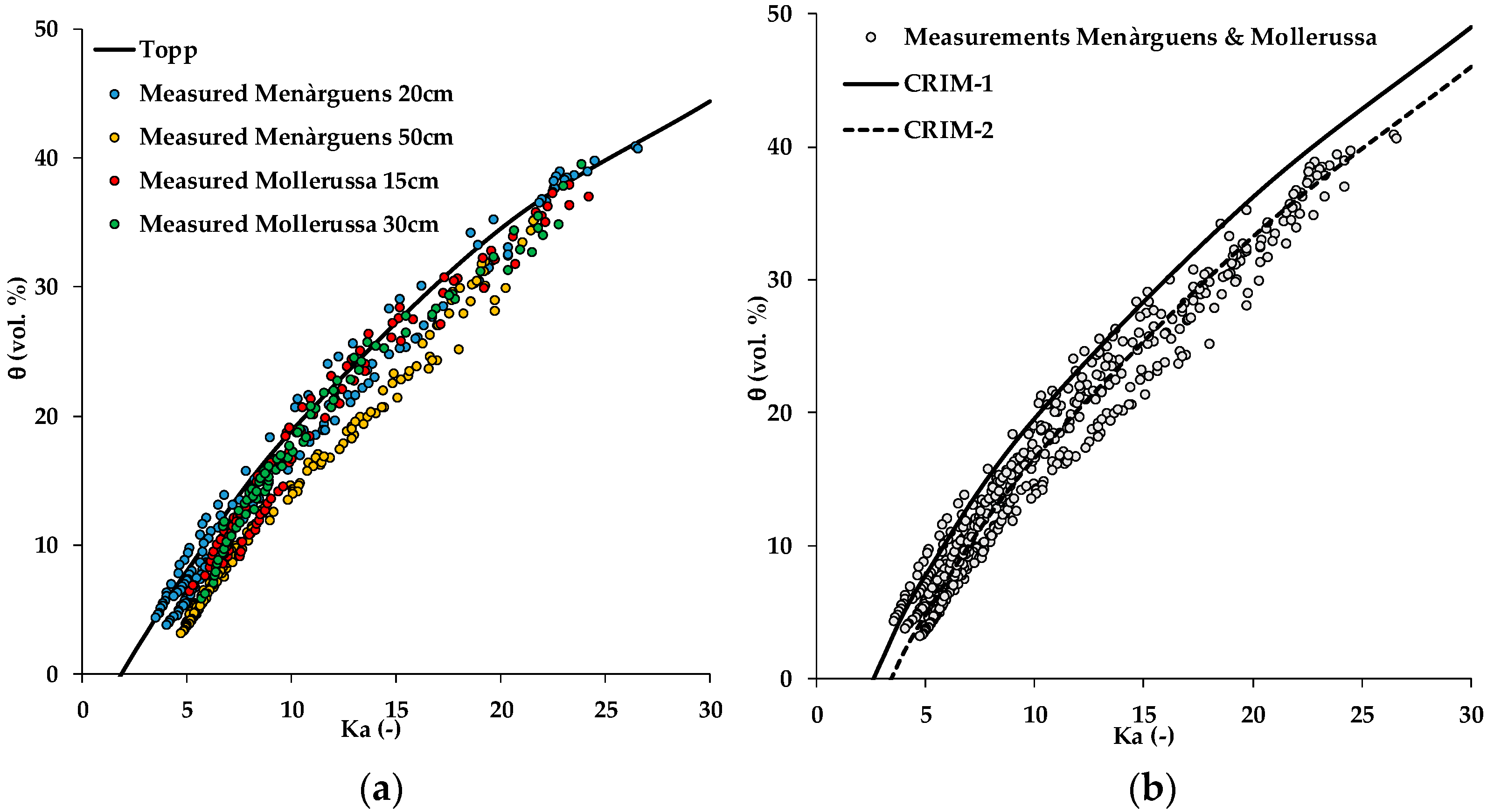
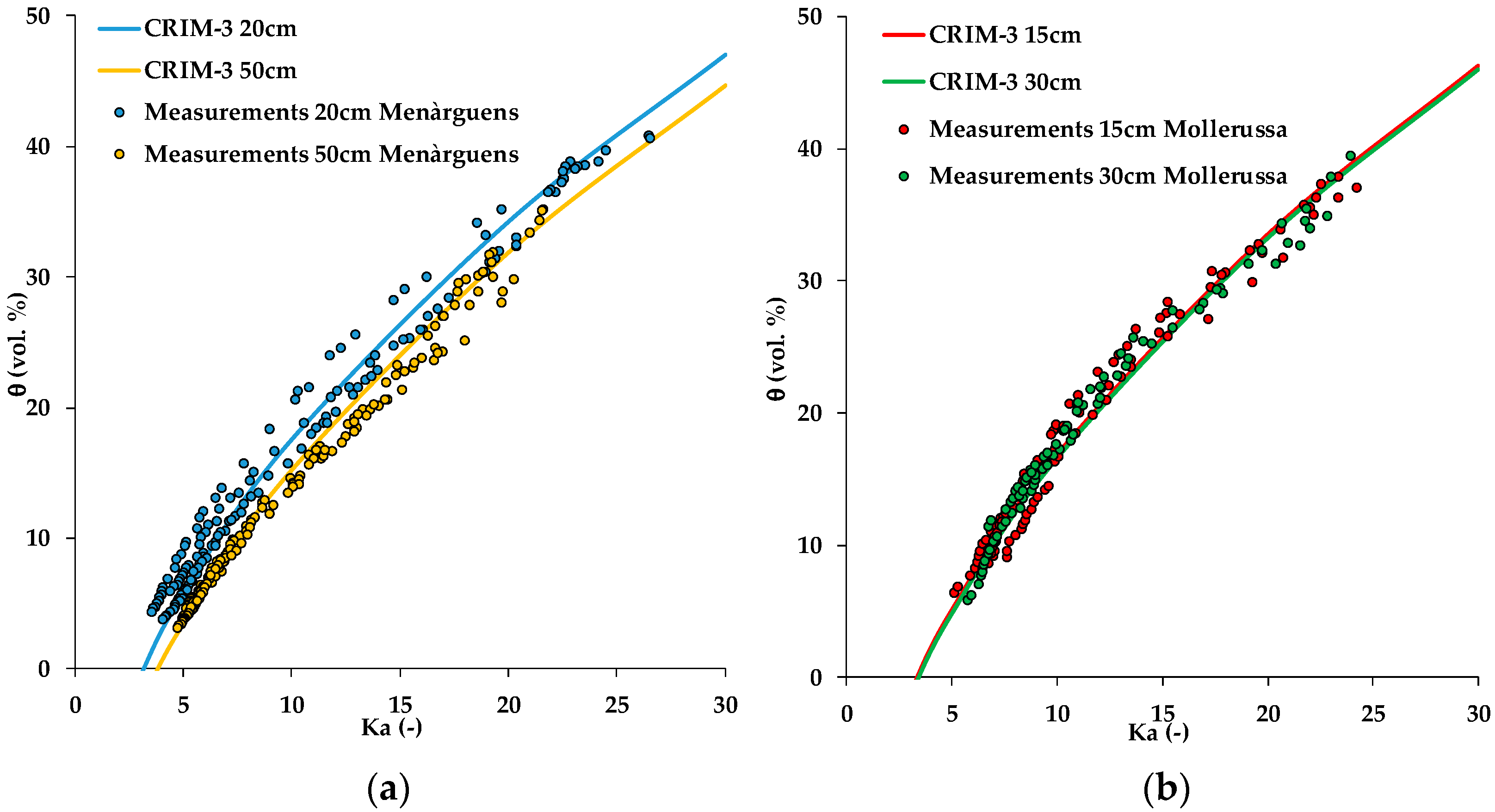
3.3. Permittivity–Soil Water Content Relationships
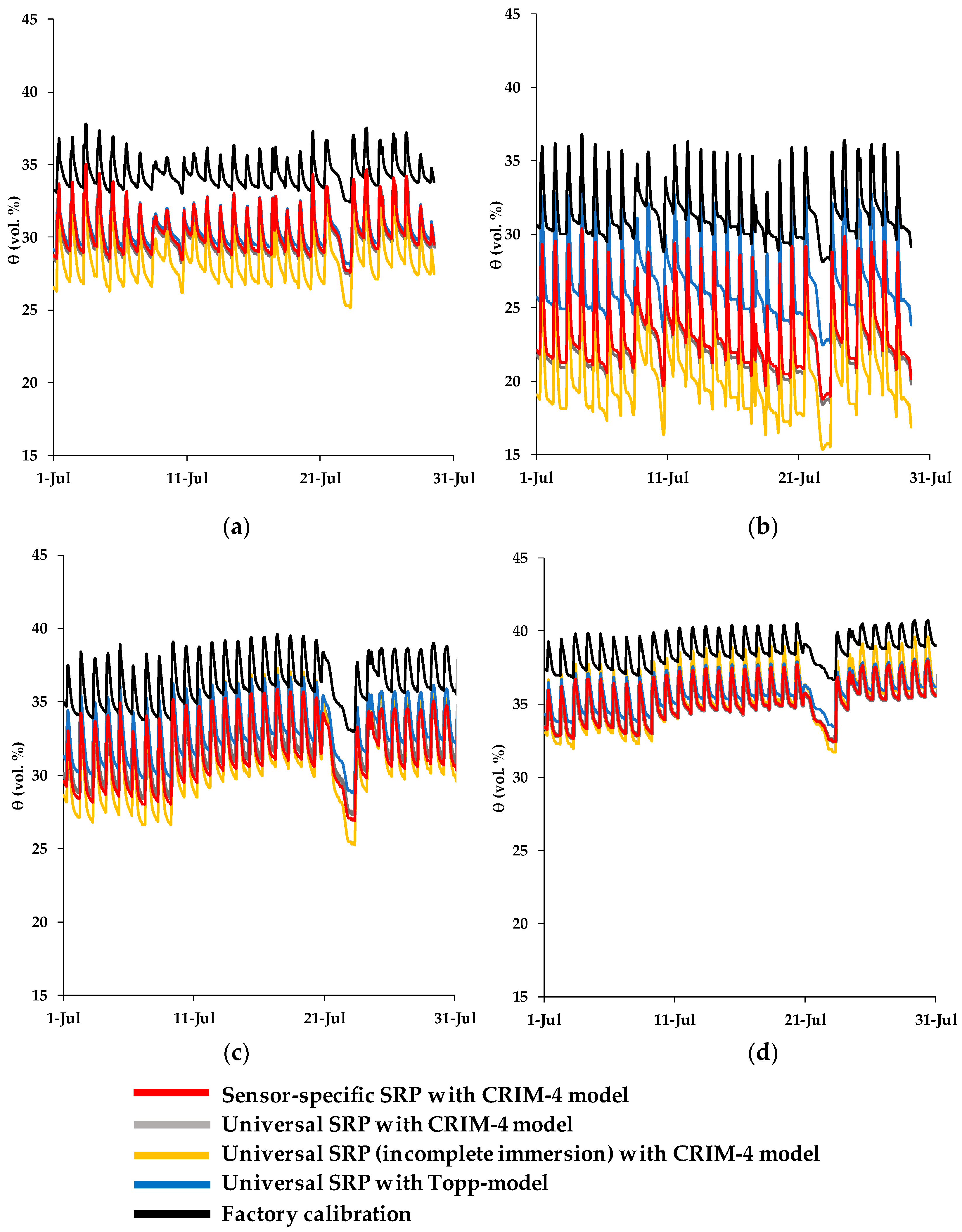
3.4. Comparison of Factory and Two-Step Calibration Approach
3.5. Analysis of Field Measurements
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nolz, R.; Kammerer, G.; Cepuder, P. Calibrating soil water potential sensors integrated into a wireless monitoring network. Agric. Water Manag. 2013, 116, 12–20. [Google Scholar] [CrossRef]
- Soulis, K.X.; Elmaloglou, S. Optimum soil water content sensors placement for surface drip irrigation scheduling in layered soils. Comput. Electron. Agric. 2018, 152, 1–8. [Google Scholar] [CrossRef]
- Robinson, D.A.; Jones, S.B.; Wraith, J.M.; Or, D.; Friedman, S.P. A review of advances in dielectric and electrical conductivity measurement in soils using time domain reflectometry. Vadose Zone J. 2003, 2, 444–475. [Google Scholar] [CrossRef]
- Kojima, Y.; Shigeta, R.; Miyamoto, N.; Shirahama, Y.; Nishioka, K.; Mizoguchi, M.; Kawahara, Y. Low-Cost Soil Moisture Profile Probe Using Thin-Film Capacitors and a Capacitive Touch Sensor. Sensors 2016, 16, 1292. [Google Scholar] [CrossRef]
- Bogena, H.R.; Huisman, J.A.; Schilling, B.; Weuthen, A.; Vereecken, H. Effective calibration of low-cost soil water content sensors. Sensors 2017, 17, 208. [Google Scholar] [CrossRef] [PubMed]
- Rosenbaum, U.; Huisman, J.A.; Weuthen, A.; Vereecken, H.; Bogena, H.R. Sensor-to-Sensor Variability of the ECHO EC-5, TE, and 5TE sensors in dielectric liquids. Vadose Zone J. 2010, 9, 181–186. [Google Scholar] [CrossRef]
- Spelman, D.; Kinzli, K.D.; Kunberger, T. Calibration of the 10HS soil moisture sensor for Southwest Florida Agricultural Soils. J. Irrig. Drain. Eng. 2013, 139, 965–971. [Google Scholar] [CrossRef]
- Visconti, F.; de Paz, J.M.; Martínez, D.; Molina, M.J. Laboratory and field assessment of the capacitance sensors Decagon 10HS and 5TE for estimating the water content of irrigated soils. Agric. Water Manag. 2014, 132, 111–119. [Google Scholar] [CrossRef]
- Topp, G.C.; Zegelin, S.; White, I. Impacts of the real and imaginary components of relative permittivity on time domain reflectometry measurements in soils. Soil Sci. Soc. Am. J. 2000, 64, 1244–1252. [Google Scholar] [CrossRef]
- Jones, S.B.; Blonquist, J.M.; Robinson, D.A.; Rasmussen, V.P.; Or, D. Standardizing characterization of electromagnetic water content sensors: Part 1. Methodology. Vadose Zone J. 2005, 4, 1048–1058. [Google Scholar] [CrossRef]
- Hilhorst, M.A.; Dirksen, C. Dielectric water content sensors: Time domain versus frequency domain. In Time Domain Reflectometry in Environmental, Infrastructure, and Mining Applications; O’Connor, K.M., Dowding, C.H., Jones, C.C., Dowding, C.H., Eds.; US Department Interior Bureau of Mines: Washington, DC, USA; Northwestern University: Evanston, IL, USA, 1994; pp. 23–33. [Google Scholar]
- Sakaki, T.; Limsuwat, A.; Smits, K.M.; Illangasekare, T.H. Empirical two-point α-mixing model for calibrating the ECH2O EC-5 soil moisture sensor in sands. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Rosenbaum, U.; Huisman, J.A.; Vrba, J.; Vereecken, H.; Bogena, H.R. Correction of temperature and electrical conductivity effects on dielectric permittivity measurements with ECH2O sensors. Vadose Zone J. 2011, 10, 582–593. [Google Scholar] [CrossRef]
- Vaz, C.M.P.; Jones, S.; Meding, M.; Tuller, M. Evaluation of standard calibration functions for eight electromagnetic soil moisture sensors. Vadose Zone J. 2013, 12. [Google Scholar] [CrossRef]
- Robinson, D.A.; Gardner, C.M.K.; Evans, J.; Cooper, J.D.; Hodnett, M.G.; Bell, J.P. The dielectric calibration of capacitance probes for soil hydrology using an oscillation frequency response model. Hydrol. Earth Syst. Sci. Discuss. 1998, 2, 111–120. [Google Scholar] [CrossRef] [Green Version]
- Seyfried, M.S.; Murdock, M.D. Measurement of Soil Water Content with a 50-MHz Soil Dielectric Sensor. Soil Sci. Soc. Am. J. 2004, 68, 394. [Google Scholar] [CrossRef]
- Bogena, H.R.; Huisman, J.A.; Oberdörster, C.; Vereecken, H. Evaluation of a low-cost soil water content sensor for wireless network applications. J. Hydrol. 2007, 344, 32–42. [Google Scholar] [CrossRef]
- Kögler, S.; Wagner, N.; Zacharias, S.; Wollschläger, U. Characterization of reference materials for an economic calibration approach for low-cost soil moisture sensors. In Proceedings of the 10th International Conference on Electromagnetic Wave Interaction with Water and Moist Substances (ISEMA 2016), Weimar, Germany, 23–27 May 2013; pp. 6–11. [Google Scholar]
- Kaatze, U.; Kettler, M.; Pottel, R. Dielectric relaxation spectrometry of mixtures of water with isopropoxy-and isobutoxyethanol. Comparison to unbranched poly (ethylene glycol) monoalkyl ethers. J. Phys. Chem. 1996, 100, 2360–2366. [Google Scholar] [CrossRef]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef] [Green Version]
- Roth, K.; Schulin, R.; Fluhler, H.; Attinger, W. Calibration of time domain reflectometry for water-content measurement using a composite dielectric approach. Water Resour. Res. 1990, 26, 2267–2273. [Google Scholar] [CrossRef]
- Qu, W.; Bogena, H.R.; Huisman, J.A.; Vereecken, H. Calibration of a Novel Low-Cost Soil Water Content Sensor Based on a Ring Oscillator. Vadose Zone J. 2013, 12. [Google Scholar] [CrossRef]
- Chung, C.C.; Lin, C.P. Apparent dielectric constant and effective frequency of TDR measurements: Influencing factors and comparison. Vadose Zone J. 2008, 8, 548–556. [Google Scholar] [CrossRef]
- Kizito, F.; Campbell, C.S.; Campbell, G.S.; Cobos, D.R.; Teare, B.L.; Carter, B.; Hopmans, J.W. Frequency, electrical conductivity and temperature analysis of a low-cost capacitance soil moisture sensor. J. Hydrol. 2008, 352, 367–378. [Google Scholar] [CrossRef]
- Birchak, J.R.; Gardner, C.G.; Hipp, J.E.; Victor, J.M. High dielectric constant microwave probes for sensing soil moisture. Proc. IEEE 1974, 62, 93–98. [Google Scholar] [CrossRef]
- Pepin, S.; Livingston, N.J.; Hook, W.R. Temperature dependent measurement errors in time domain reflectometry determination of soil water. Soil Sci. Soc. Am. J. 1995, 59, 38–43. [Google Scholar] [CrossRef]
- Weast, R.C. Handbook of Physics and Chemistry, 67th ed.; CRC press: Boca Raton, FL, USA, 1986; pp. 1983–1984. [Google Scholar]
- Robinson, D.A. Measurement of the solid dielectric permittivity of clay minerals and granular samples using a time domain reflectometry immersion method. Vadose Zone J. 2004, 3, 705–713. [Google Scholar] [CrossRef]
- Rosenbaum, U.; Bogena, H.R.; Herbst, M.; Huisman, J.A.; Peterson, T.J.; Weuthen, A.; Western, A.H.; Vereecken, H. Seasonal and event dynamics of spatial soil moisture patterns at the small catchment scale. Water Resour. Res. 2012, 48, 1–22. [Google Scholar] [CrossRef]
- Qu, W.; Bogena, H.R.; Huisman, J.A.; Schmidt, M.; Kunkel, R.; Weuthen, A.; Schilling, B.; Sorg, J.; Vereecken, H. The integrated water balance and soil data set of the Rollesbroich hydrological observatory. Earth Syst. Sci. Data 2016, 8, 517–529. [Google Scholar] [CrossRef] [Green Version]
- Fares, A.; Awal, R.; Bayabil, H. Soil water content sensor response to organic matter content under laboratory conditions. Sensors 2016, 16, 1239. [Google Scholar] [CrossRef]
- Matula, S.; Bát’ková, K.; Legese, W.L. Laboratory performance of five selected soil moisture sensors applying factory and own calibration equations for two soil media of different bulk density and salinity levels. Sensors 2016, 16, 1912. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Depth (m) | Menàrguens | Mollerussa | ||
|---|---|---|---|---|
| 0–0.5 (Ridge) | 0.5–1 (Under Ridge) | 0–0.2 | 0.2–0.4 | |
| Silt (0.002 < d < 0.05 mm) % | 37.2 | 37.0 | 40.7 | 40.6 |
| Clay (d < 0.002 mm) % | 21.2 | 24.3 | 23.5 | 23.9 |
| Sand (0.05 < d < 2 mm) % | 41.6 | 38.7 | 35.8 | 35.5 |
| USDA Soil Classification | Loam | Loam | Loam | Loam |
| Bulk density (Kg·m−3) | 1370 | 1700 | 1480 | 1500 |
| Calibration Standard | Medium | Reference Permittivity | Volume Fraction i-C3E1 | Volume Fraction Water | Equivalent SWC |
|---|---|---|---|---|---|
| - | - | - | vol. % | ||
| M1 | Air | 1.00 | - | - | - |
| M2 | Glass beads | 3.34 | - | - | 4.0 |
| M3 | I-C3E1/water mixture | 18.14 | 0.92 | 0.08 | 32.0 |
| M4 | I-C3E1/water mixture | 26.26 | 0.80 | 0.20 | 41.0 |
| M5 | I-C3E1/water mixture | 34.82 | 0.68 | 0.32 | 48.0 |
| Menàrguens | Mollerussa | ||||||
|---|---|---|---|---|---|---|---|
| Sample Name | Depth | Bulk Density | Porosity | Sample Name | Depth | Bulk Density | Porosity |
| cm | g·cm−3 | % | cm | g·cm−3 | % | ||
| S1-Men | ~20 | 1.40 | 47 | S1-Moll | ~15 | 1.56 | 41 |
| S2-Men | 1.33 | 50 | S2-Moll | 1.41 | 47 | ||
| S3-Men | 1.37 | 48 | S3-Moll | 1.41 | 47 | ||
| S4-Men | 1.36 | 49 | S4-Moll | 1.50 | 43 | ||
| S5-Men | ~50 | 1.72 | 35 | S5-Moll | ~30 | 1.57 | 41 |
| S6-Men | 1.60 | 40 | S6-Moll * | 1.47 | 44 | ||
| S7-Men | 1.75 | 34 | S7-Moll | 1.46 | 45 | ||
| S8-Men | 1.70 | 36 | S8-Moll | 1.50 | 43 | ||
| Calibration Medium | Incompletely Immersed Sensors in Calibration Medium | Fully Immersed Sensors in Calibration Medium | ||||
|---|---|---|---|---|---|---|
| Mean Sensor Response | Standard Deviation | Coefficient of Variation | Mean Sensor Response | Standard Deviation | Coefficient of Variation | |
| V | V | % | V | V | % | |
| M1 | 0.50 | 0.009 | 1.84 | 0.50 | 0.009 | 1.84 |
| M2 | 0.80 | 0.017 | 2.10 | 0.79 | 0.016 | 2.08 |
| M3 | 1.32 | 0.011 | 0.86 | 1.32 | 0.011 | 0.86 |
| M4 | 1.41 | 0.017 | 1.23 | 1.43 | 0.016 | 1.12 |
| M5 | 1.47 | 0.015 | 1.01 | 1.52 | 0.017 | 1.10 |
| α | β | γ | RMSE | |
|---|---|---|---|---|
| Equation (2) incompletely immersed | −0.200 | 0.335 | −1.227 | 0.518 |
| Equation (2) fully immersed | −0.118 | 0.220 | −2.456 | 0.412 |
| Calibration Standard | Sensor-Specific Calibration | Universal Calibration Function | ||
|---|---|---|---|---|
| RMSE Ka | RMSE θeq (vol. %) | RMSE Ka | RMSE θeq (vol. %) | |
| M1 | 0.349 | - | 0.350 | - |
| M2 | 0.398 | 1.014 | 0.426 | 1.083 |
| M3 | 0.397 | 0.528 | 0.684 | 0.901 |
| M4 | 0.608 | 0.571 | 1.424 | 1.317 |
| M5 | 0.207 | 0.135 | 2.324 | 1.471 |
| Total | 0.427 | 0.642 | 1.421 | 1.213 |
| Model | RMSE (vol. %) |
|---|---|
| Topp | 2.94 |
| Complex Refractive Index Model 1 (CRIM-1) | 3.54 |
| Complex Refractive Index Model 2 (CRIM-2) | 1.90 |
| Complex Refractive Index Model 3 (CRIM-3) | 1.43 |
| Complex Refractive Index Model 4 (CRIM-4) | 1.37 |
| Depth | Menàrguens | Mollerussa | ||
|---|---|---|---|---|
| 20 cm | 50 cm | 15 cm | 30 cm | |
| Kwater | 78.54 | 78.54 | 78.54 | 78.54 |
| Kair | 1.00 | 1.00 | 1.00 | 1.00 |
| Ksolid | 6.09 | 6.66 | 6.16 | 5.98 |
| η | 0.48 | 0.36 | 0.44 | 0.43 |
| Calibration Variant | Menàrguens | Mollerussa | Mean RMSE (vol.%) | ||
|---|---|---|---|---|---|
| 20 cm | 50 cm | 15 cm | 30 cm | ||
| RMSE (vol.%) | |||||
| Universal SRP with CRIM-4 model | 0.17 | 0.32 | 0.50 | 0.02 | 0.25 |
| Universal SRP (incomplete immersion) with CRIM-4 model | 1.84 | 2.79 | 0.79 | 0.70 | 1.53 |
| Universal SRP with Topp model | 0.30 | 3.57 | 1.54 | 0.65 | 1.51 |
| Factory calibration | 4.09 | 8.23 | 4.90 | 3.51 | 5.18 |
| Calibration Variant | Menàrguens | Mollerussa | Absolute Mean Difference (vol.%) | ||
|---|---|---|---|---|---|
| 20 cm | 50 cm | 15 cm | 30 cm | ||
| Mean Difference (vol. %) | |||||
| Universal SRP with CRIM-4 model | −0.17 | −0.32 | 0.50 | −0.01 | 0.25 |
| Universal SRP (incomplete immersion) with CRIM-4 model | −1.80 | −2.73 | −0.31 | 0.39 | 1.31 |
| Universal SRP with Topp model | 0.28 | 3.57 | 1.52 | 0.61 | 1.49 |
| Factory calibration | 4.07 | 8.21 | 4.87 | 3.49 | 5.16 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Domínguez-Niño, J.M.; Bogena, H.R.; Huisman, J.A.; Schilling, B.; Casadesús, J. On the Accuracy of Factory-Calibrated Low-Cost Soil Water Content Sensors. Sensors 2019, 19, 3101. https://doi.org/10.3390/s19143101
Domínguez-Niño JM, Bogena HR, Huisman JA, Schilling B, Casadesús J. On the Accuracy of Factory-Calibrated Low-Cost Soil Water Content Sensors. Sensors. 2019; 19(14):3101. https://doi.org/10.3390/s19143101
Chicago/Turabian StyleDomínguez-Niño, Jesús María, Heye Reemt Bogena, Johan Alexander Huisman, Bernd Schilling, and Jaume Casadesús. 2019. "On the Accuracy of Factory-Calibrated Low-Cost Soil Water Content Sensors" Sensors 19, no. 14: 3101. https://doi.org/10.3390/s19143101
APA StyleDomínguez-Niño, J. M., Bogena, H. R., Huisman, J. A., Schilling, B., & Casadesús, J. (2019). On the Accuracy of Factory-Calibrated Low-Cost Soil Water Content Sensors. Sensors, 19(14), 3101. https://doi.org/10.3390/s19143101