Deep Multi-Layer Perception Based Terrain Classification for Planetary Exploration Rovers


Abstract
:1. Introduction
2. Overview
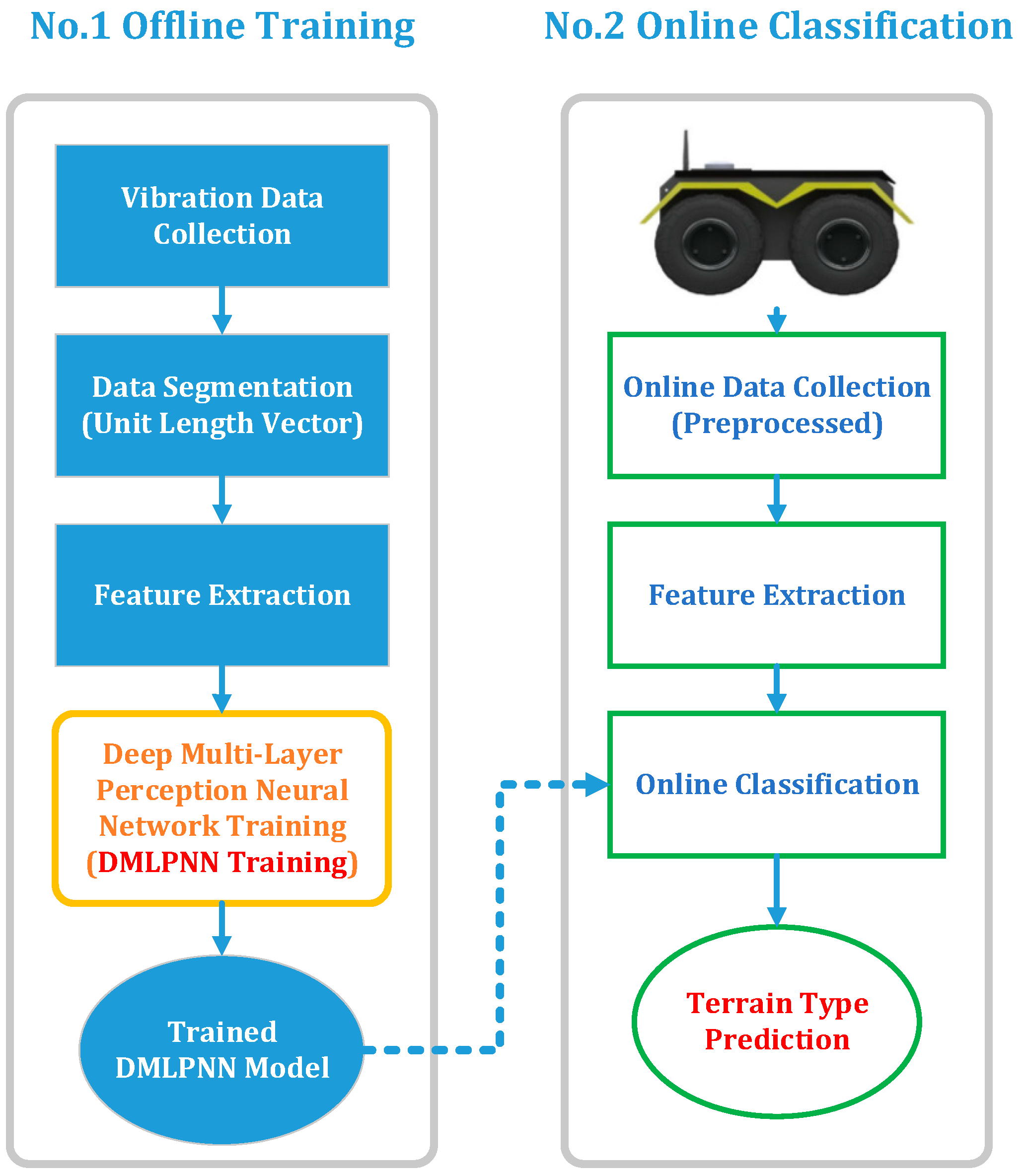
2.1. Algorithm Framework
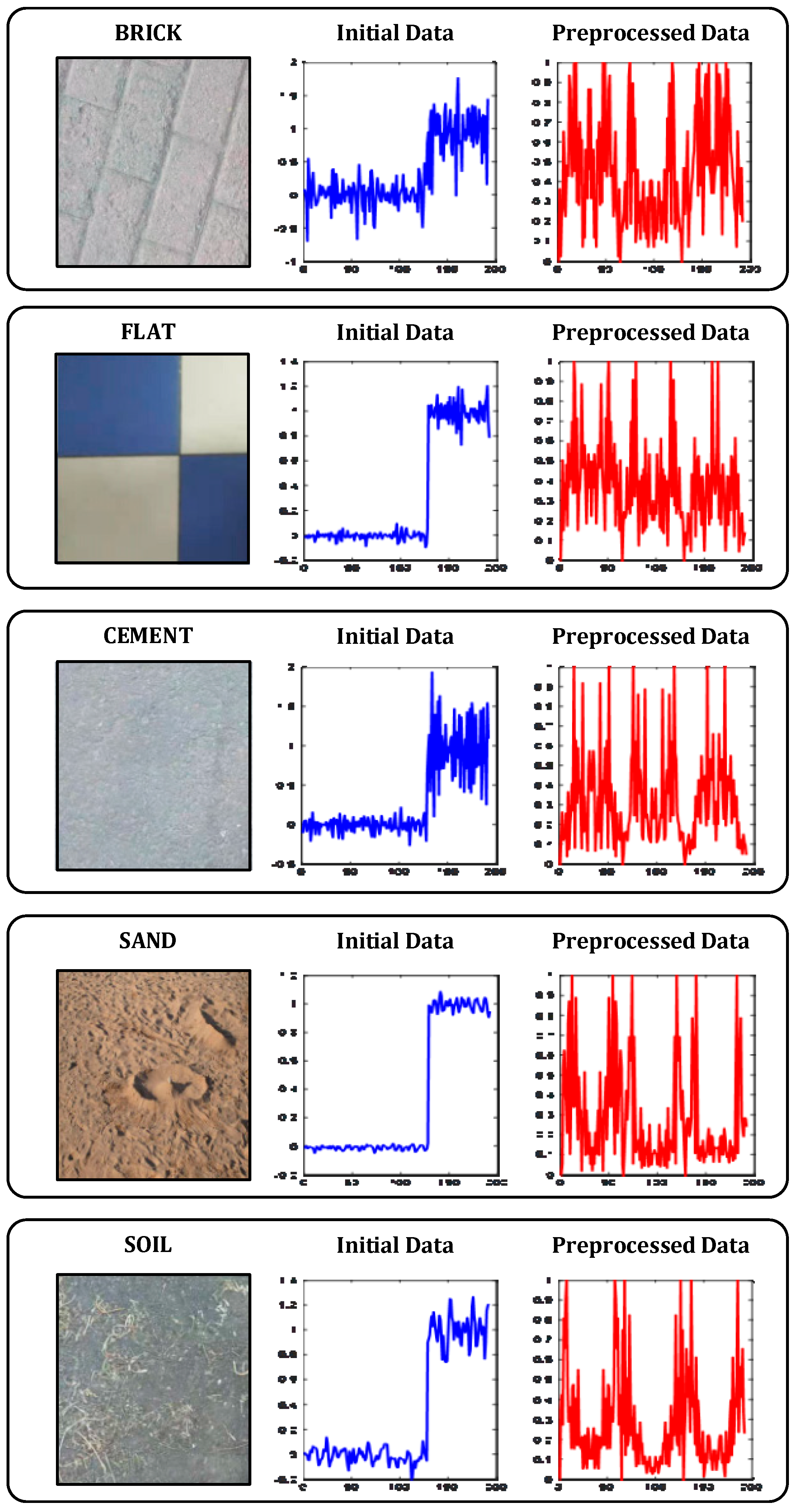
2.2. Feature Extraction
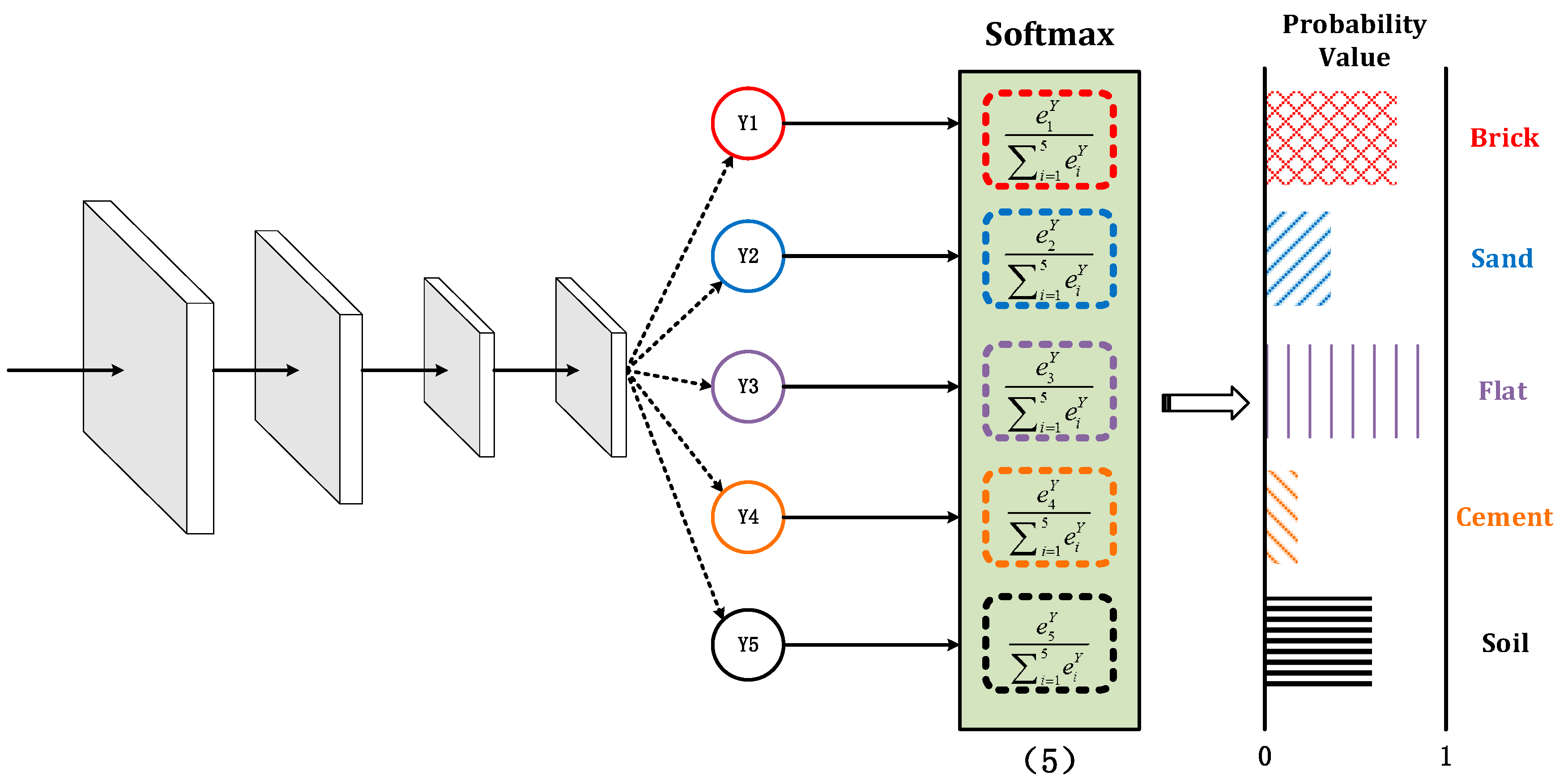
3. Multi-Layer Perception Deep Neural Network Design
3.1. Deep Neural Network
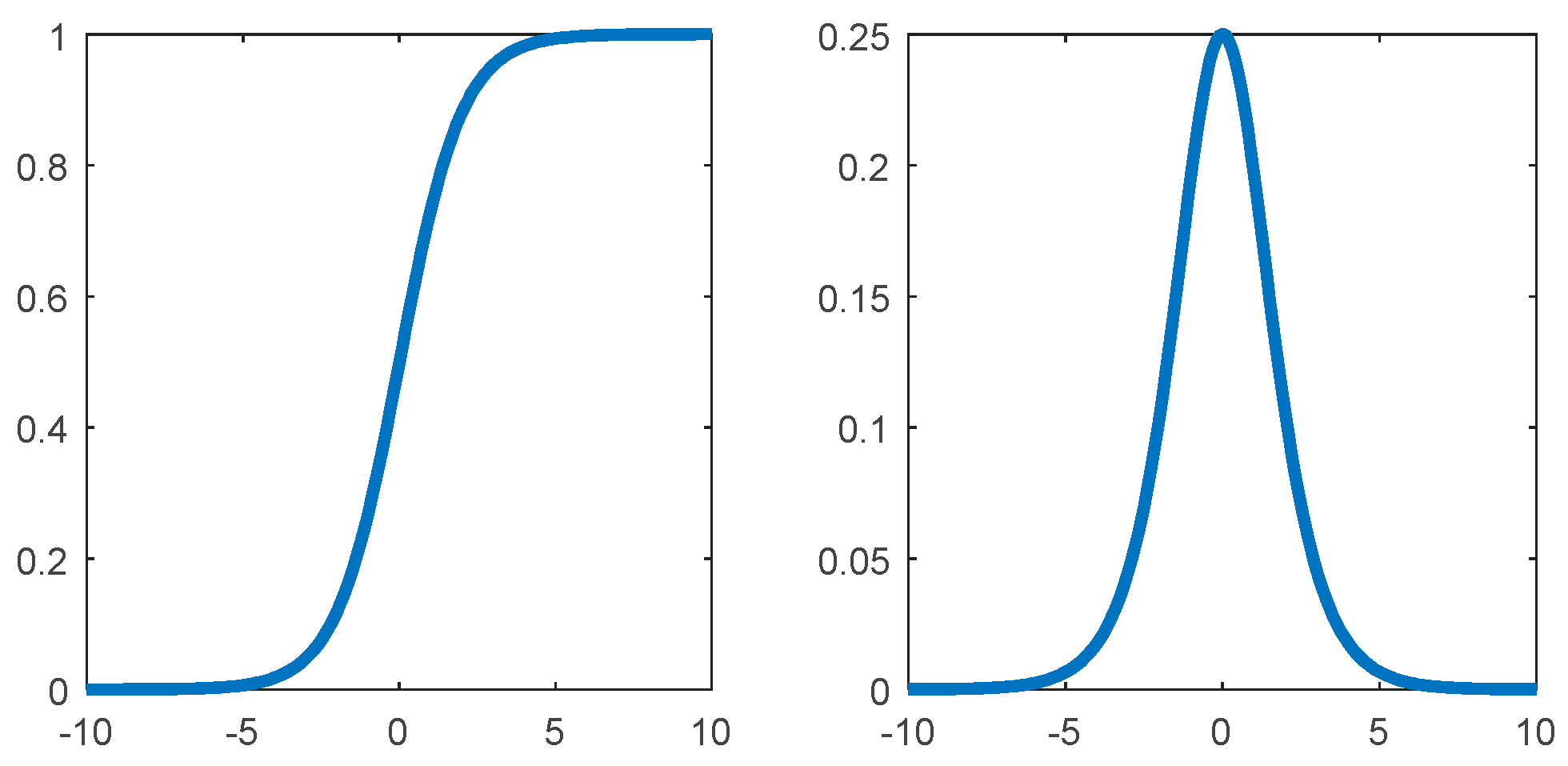
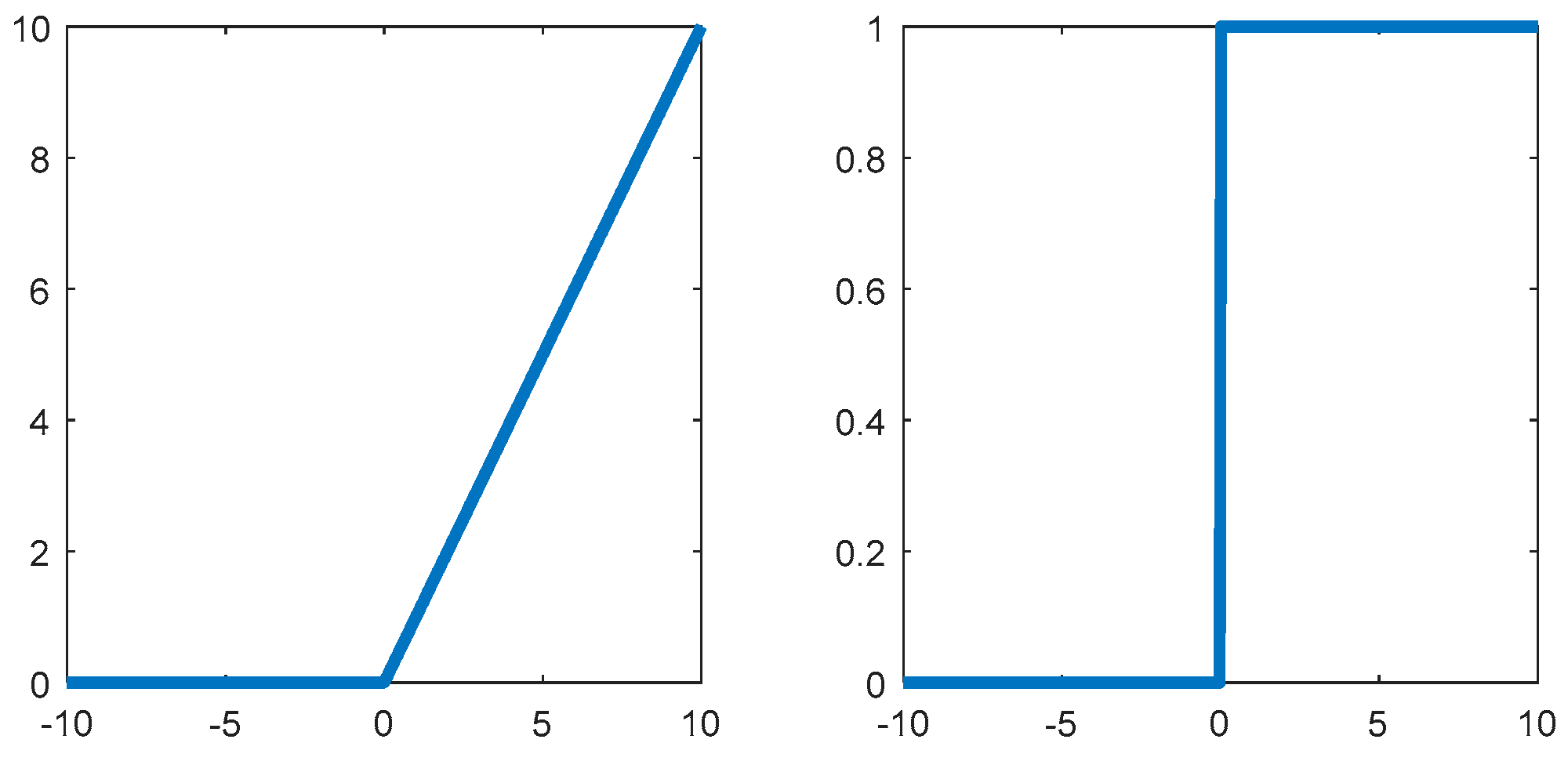
3.2. Activation Function Selection
3.3. Loss Function Selection
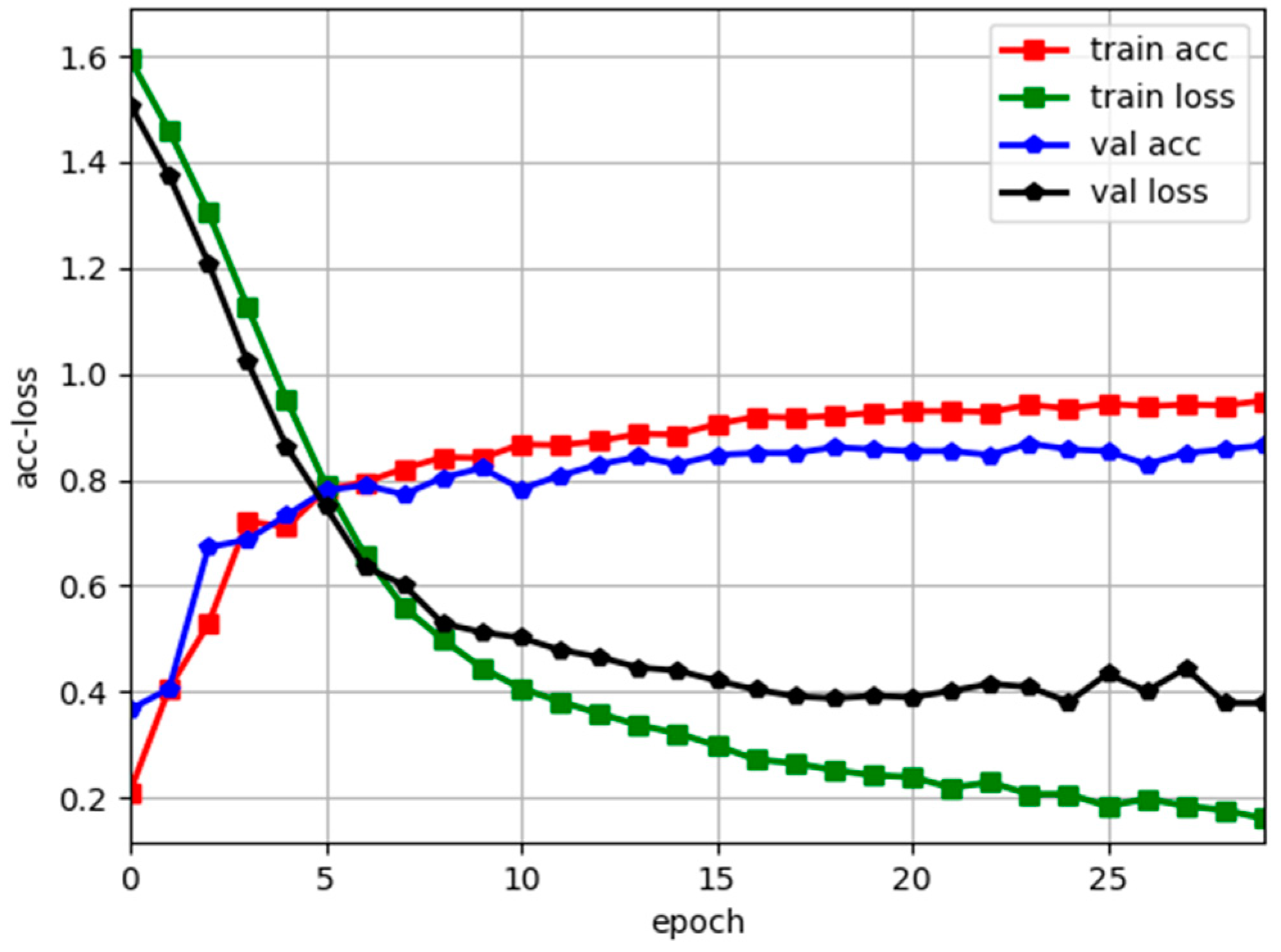
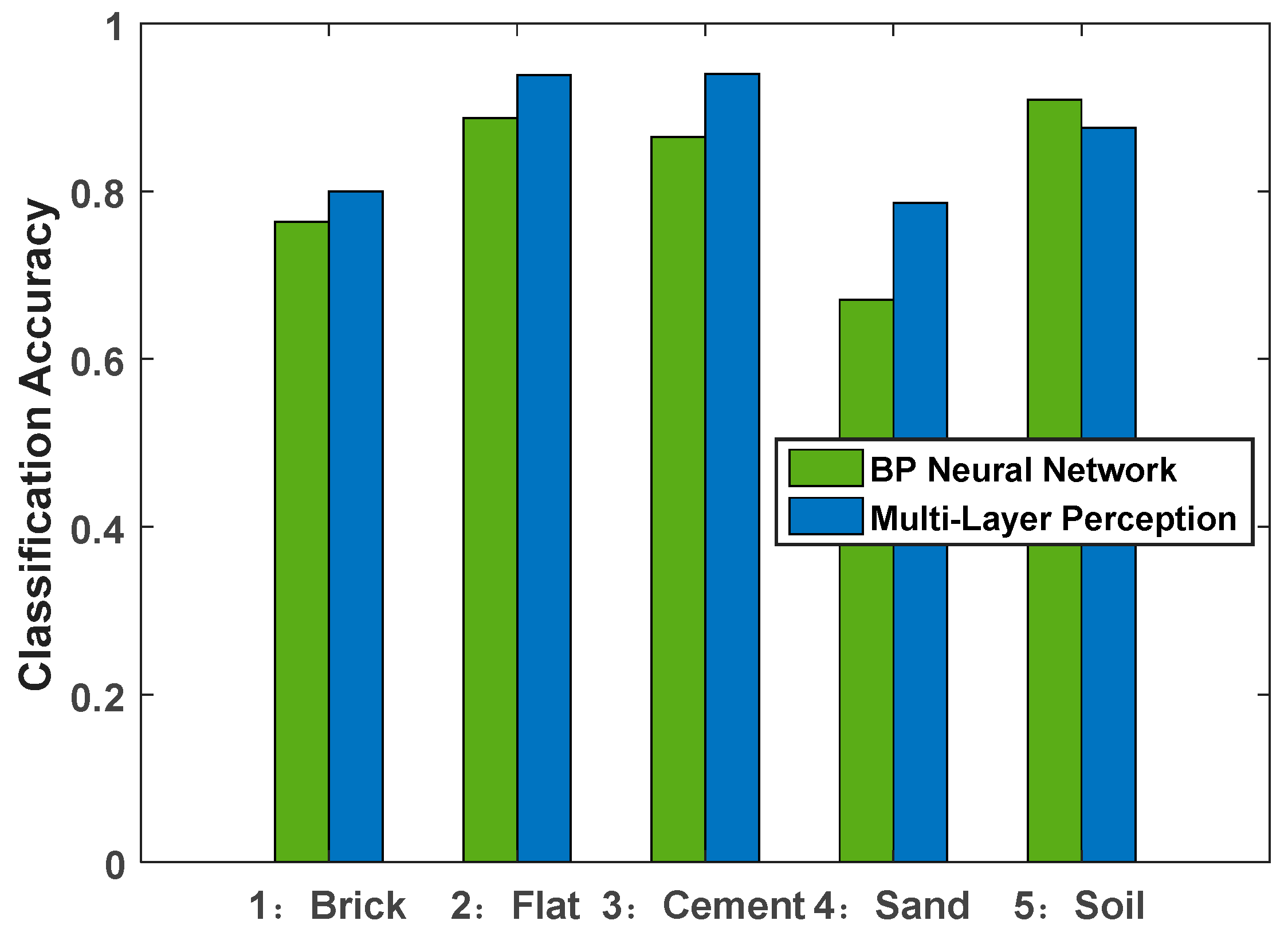
4. Results and Discussion
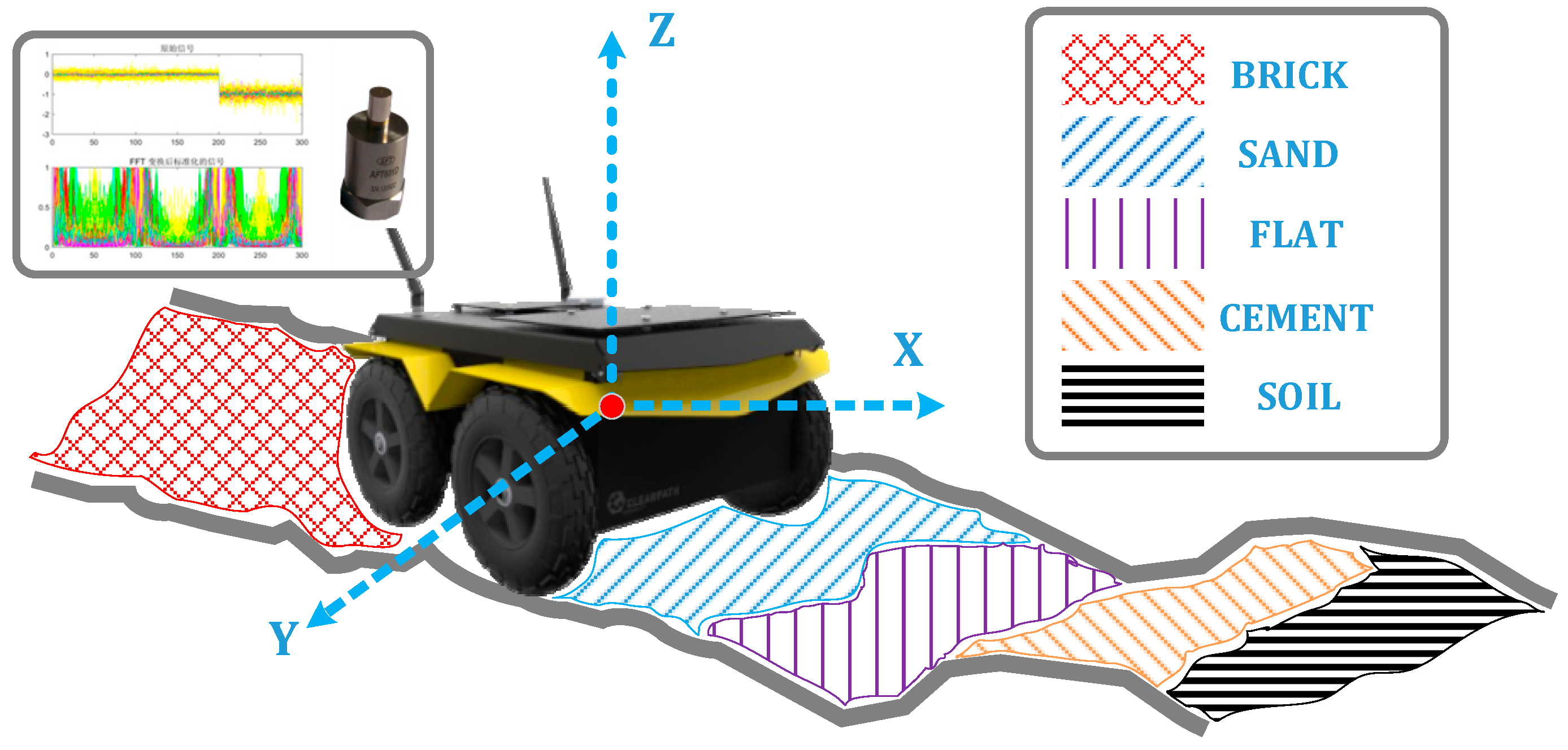
4.1. Terrain Test
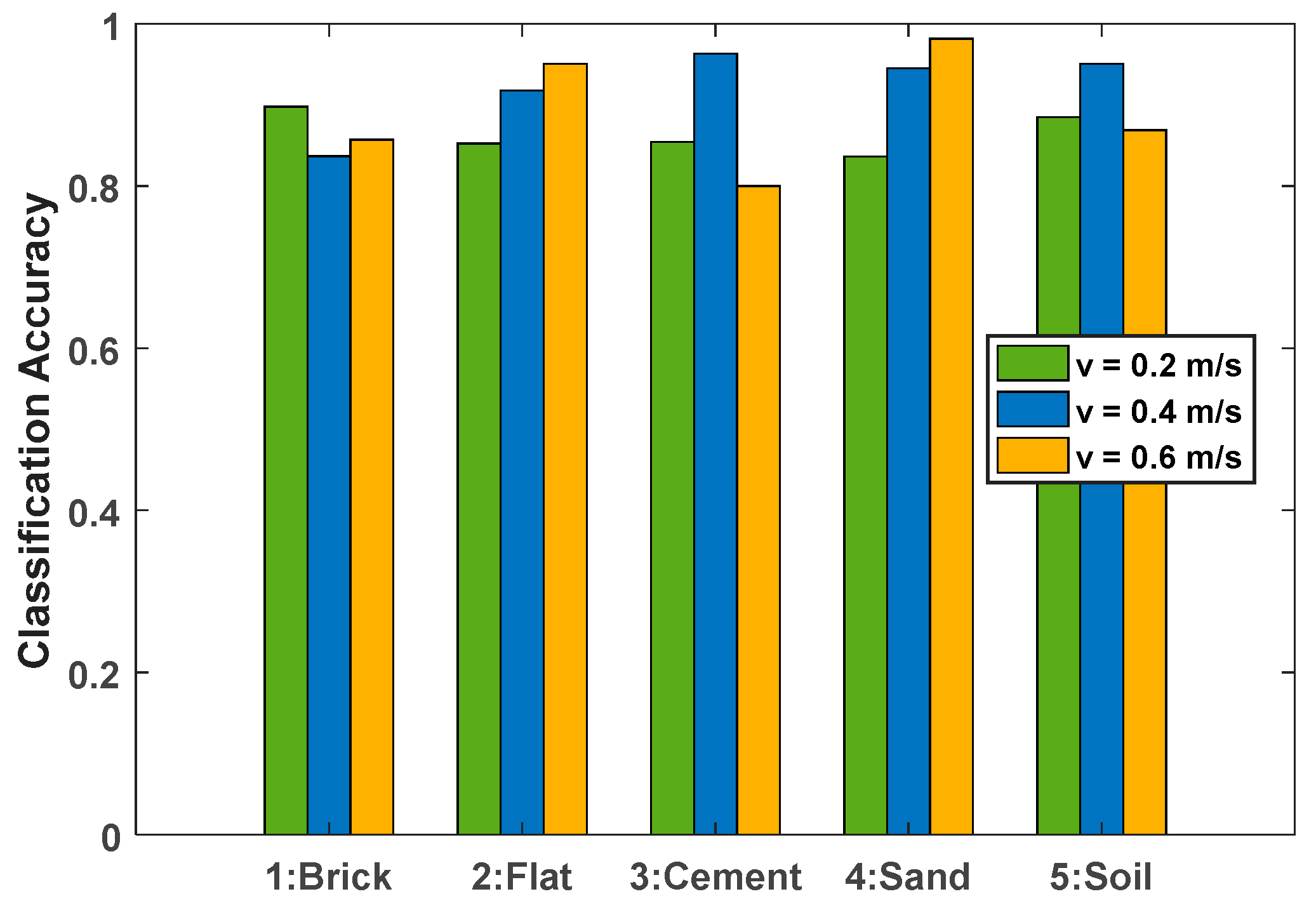
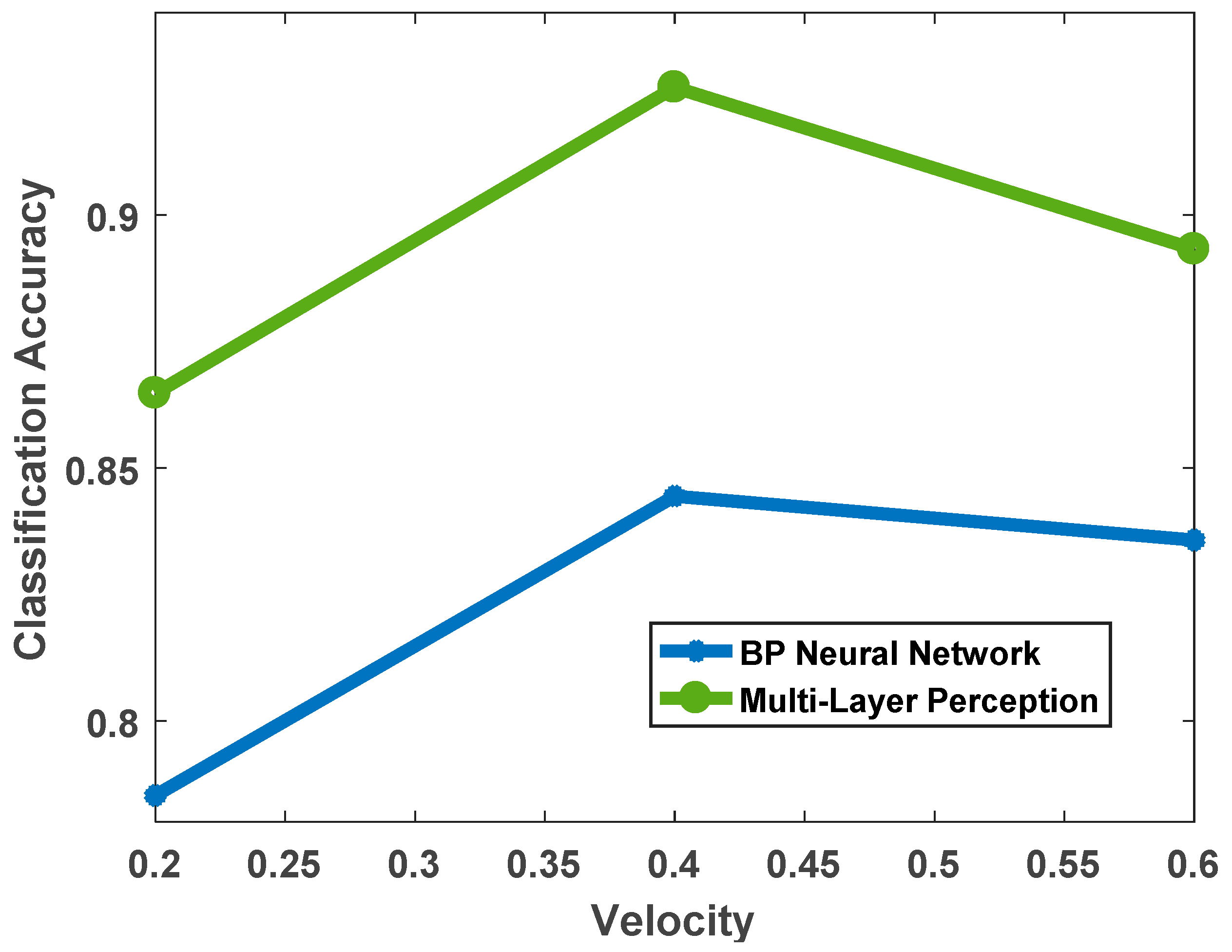
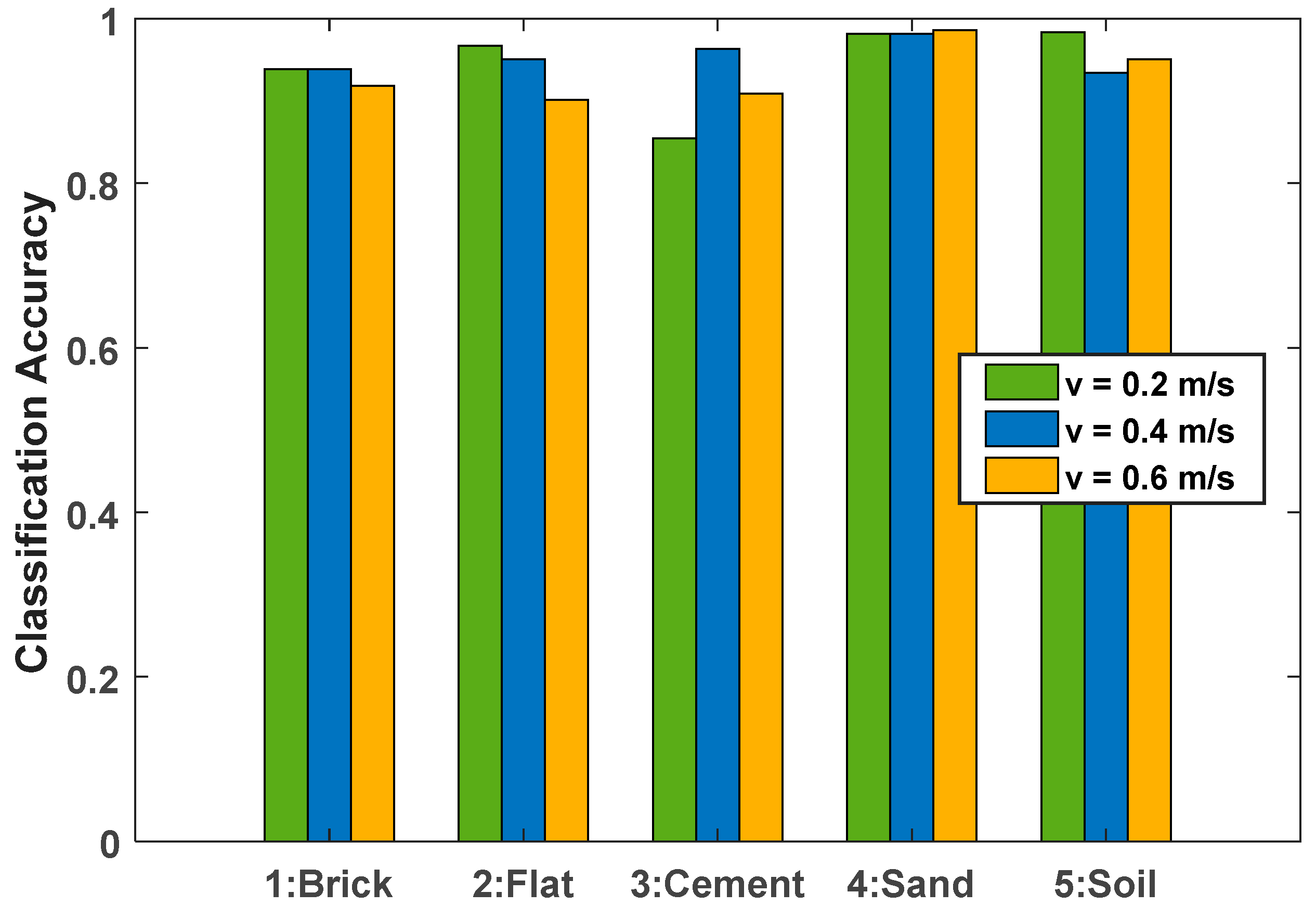
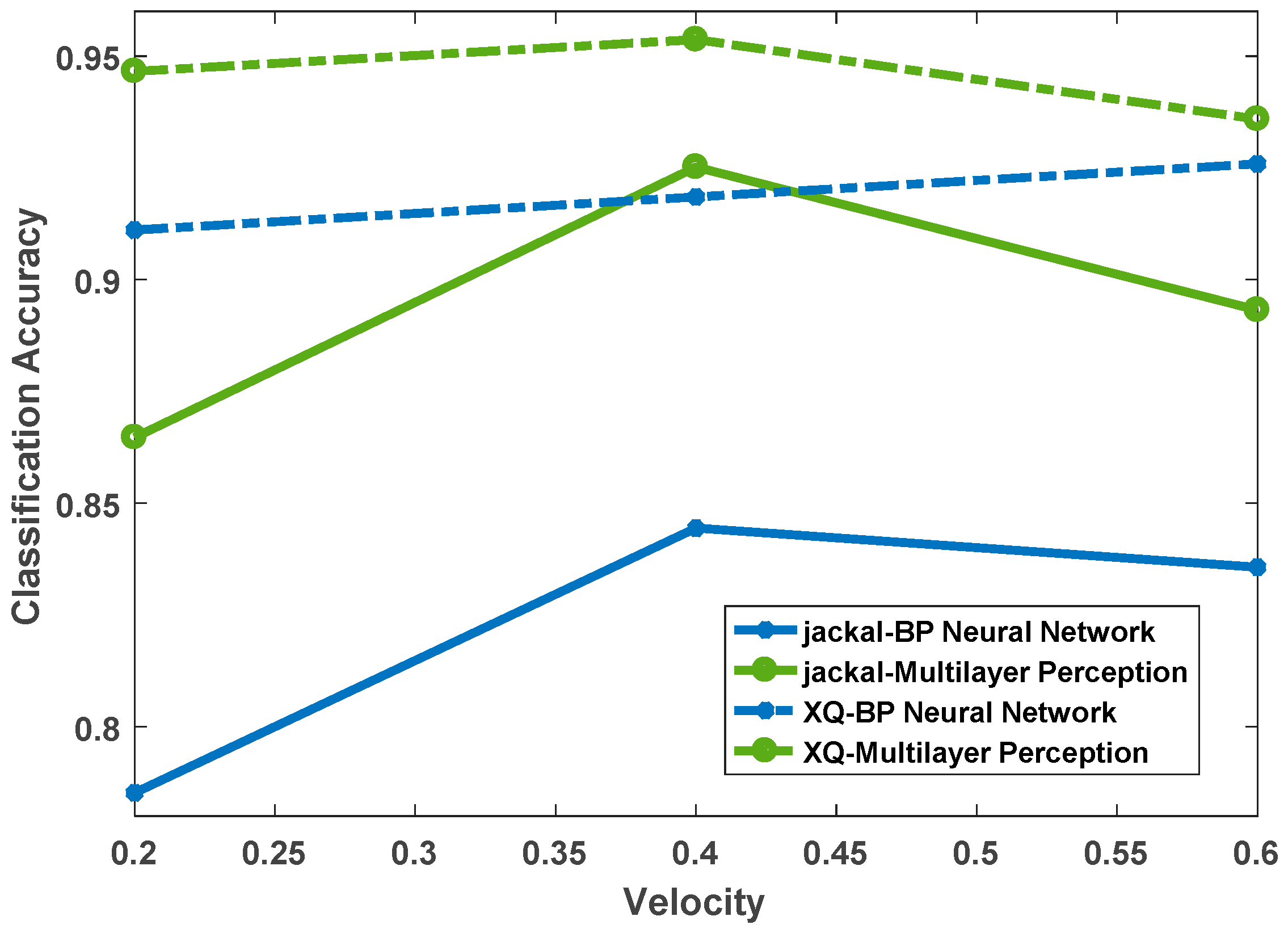
4.2. Speed Change Test
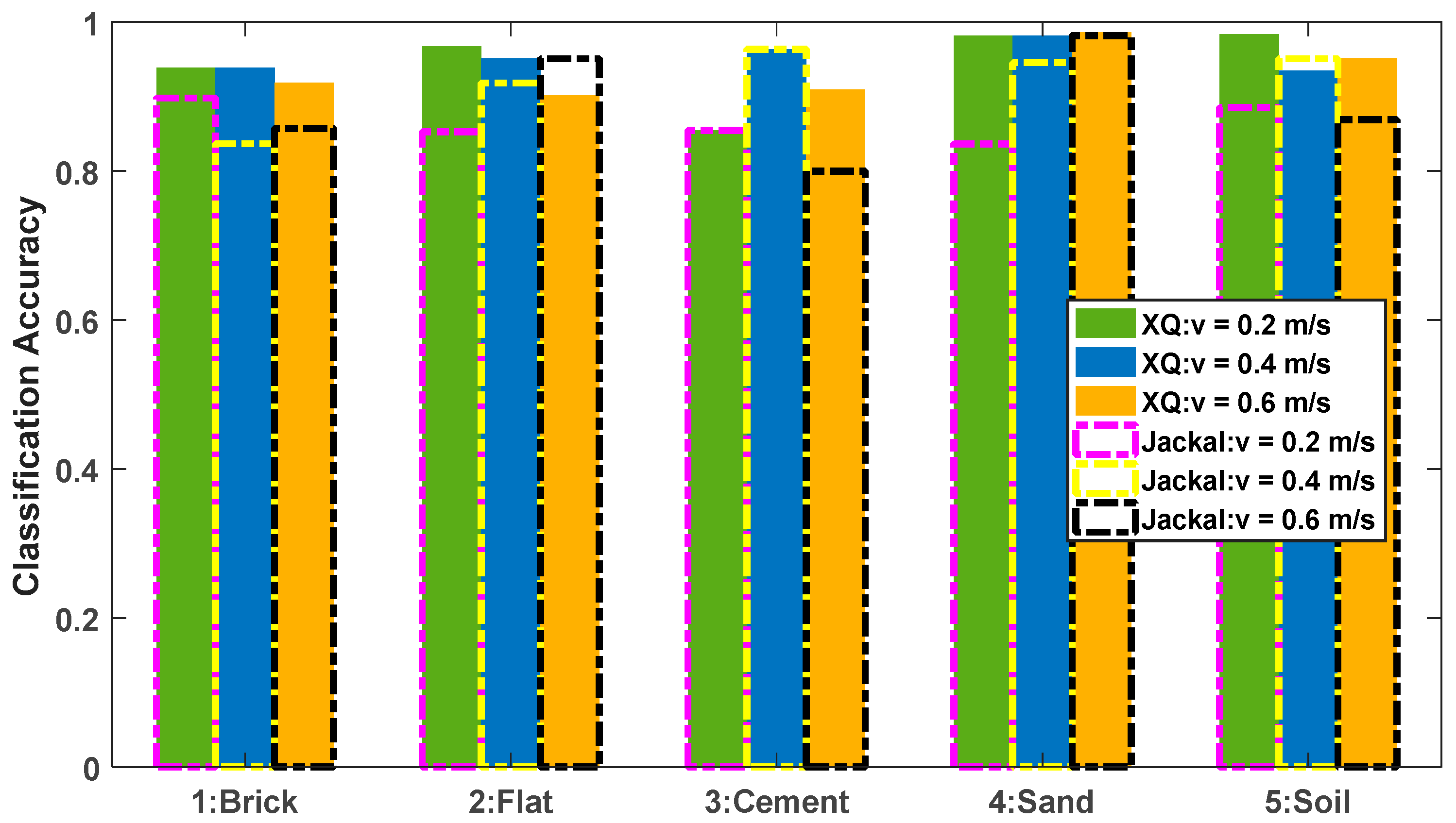
4.3. Different Platform Test
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ellery, A. Planetary Rovers—Robotics Exploration of the Solar System; Springer: Berlin, Germany, 2016. [Google Scholar]
- Wong, C.; Yang, E.; Yan, X.; Gu, D. Adaptive and intelligent navigation of autonomous planetary rovers—A survey. In Proceedings of the NASA/ESA Conference on Adaptive Hardware and Systems, Pasadena, CA, USA, 24–27 July 2017. [Google Scholar]
- Bai, C.; Guo, J.; Zheng, H. High-precision navigation and positioning of celestial exploration rover based on depth camera. Aircr. Eng. Aerosp. Technol. 2019. [Google Scholar] [CrossRef]
- Bai, C.; Guo, J. Uncertainty-based vibration/gyro composite planetary terrain mapping. Sensors 2019, 19, 2681. [Google Scholar] [CrossRef] [PubMed]
- Weszka, J.; Dyer, C.; Rosenfeld, A. A comparative study of texture measures for terrain classification. IEEE Trans. Syst. Man Cybern. 1976, 4, 269–285. [Google Scholar] [CrossRef]
- Otte, S.; Laible, S.; Hanten, R.; Liwicki, M.; Zell, A. Robust visual terrain classification with recurrent neural networks. In Proceedings of the European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning, Bruges, Belgium, 22–24 April 2015. [Google Scholar]
- Zelter, F. Autonomous terrain classification through unsupervised learning. Master Thesis, University of Wurzburg, Würzburg, Germany, 2016. [Google Scholar]
- Rothrock, B.; Papon, J.; Kennedy, R.; Ono, M.; Heverly, M. SPOC: Deep learning-based terrain classification for mars rover missions. In Proceedings of the AIAA Space Forum, Long Beach, CA, USA, 9 September 2016. [Google Scholar]
- He, C.; Liu, X.; Feng, D.; Shi, B.; Luo, B.; Liao, M. Hierarchical terrain classification based on multilayer Bayesian network and conditional random field. Remote Sens. 2017, 9, 96. [Google Scholar] [CrossRef]
- Wu, H.; Liu, B.; Su, W.; Chen, Z.; Zhang, W.; Ren, X.; Sun, J. Optimum pipeline for visual terrain classification using improved bag of visual words and fusion methods. J. Sens. 2017, 10, 1–25. [Google Scholar] [CrossRef]
- Lalonde, J.; Vandapel, N.; Huber, D.; Hebert, M. Natural terrain classification using three-dimensional ladar data for ground robot mobility. J. Field Robot. 2006, 23, 839–861. [Google Scholar] [CrossRef]
- Suger, B.; Steder, B.; Burgard, W. Traversability analysis for mobile robots in outdoor environments: A semi-supervised learning approach based on 3D-lidar data. In Proceedings of the IEEE International Conference on Robotics and Automation(ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Libby, J.; Stentz, A. Using sound to classify vehicle-terrain interactions in outdoor environments. In Proceedings of the IEEE International Conference on Robotics and Automation(ICRA), Saint Paul, UK, 14–18 May 2012. [Google Scholar]
- Valada, A.; Spinello, L.; Burgard, W. Deep Feature Learning for Acoustics-Based Terrain Classification. In Robotics Research; Springer Proceedings in Advanced Robotics; Bicchi, A., Burgard, W., Eds.; Springer: Cham, Switzerland, 2018; Volume 3. [Google Scholar]
- Valada, A.; Burgard, W. Deep spatiotemporal models for robust proprioceptive terrain classification. Int. J. Robot. Res. 2017, 36, 1521–1539. [Google Scholar] [CrossRef] [Green Version]
- Khaleghian, S.; Taheri, S. Terrain classification using intelligent tire. J. Terramechanics 2017, 17, 15–24. [Google Scholar] [CrossRef]
- Oliveira, F.; Santos, E.; Neto, A.; Campos, M.; Macharet, D. Speed-invariant terrain roughness classification and control based on inertial sensors. In Proceedings of the Latin American Robotics Symposium and Brazilian Symposium on Robotics, Curitiba, Brazil, 8–11 November 2017. [Google Scholar]
- Manduchi, R.; Castano, A.; Talukder, A.; Matthies, L. Obstacle detection and terrain classification for autonomous off-road navigation. Auton. Robot. 2005, 18, 81–102. [Google Scholar] [CrossRef]
- Navarro, A.; Teniente, E.; Morta, M.; Cetto, J. Terrain classification in complex three-dimensional outdoor environments. J. Field Robot. 2015, 32, 42–60. [Google Scholar] [CrossRef]
- Zhao, K.; Dong, M.; Gu, L. A new terrain classification framework using proprioceptive sensors for mobile robots. Math. Probl. Eng. 2017, 1–14. [Google Scholar] [CrossRef]
- Park, J.; Min, K.; Kim, H.; Lee, W.; Cho, G.; Huh, K. Road surface classification using a deep ensemble network with sensor feature selection. Sensors 2018, 18, 4342. [Google Scholar] [CrossRef] [PubMed]
- Rosenfeld, R.D.; Restrepo, M.G.; Gerard, W.H.; Bruce, W.E.; Branch, A.A.; Lewin, G.C.; Bezzo, N. Unsupervised surface classification to enhance the control performance of a UGV. In Proceedings of the IEEE Systems and Information Engineering Design Symposium, Charlottesville, VA, USA, 27 April 2018. [Google Scholar]
- Iagnemma, K.; Shiby, H.; Dubowsky, S. On-line terrain parameter estimation for planetary rovers. In Proceedings of the IEEE International Conference on Robotics and Automation(ICRA), Washington, DC, USA, 11–15 May 2002. [Google Scholar]
- Iagnamma, K.; Brooks, C.; Dubowsky, S. Visual, tactile and vibration-based terrain analysis for planetary rovers. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2004. [Google Scholar]
- Brooks, C.; Iagnemma, K. Vibration-based terrain classification for planetary exploration rovers. IEEE Trans. Robot. 2005, 21, 1185–1191. [Google Scholar] [CrossRef]
- Brooks, C.; Iagnemma, K. Self-supervised classification for planetary rover terrain sensing. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007. [Google Scholar]
- Weiss, C.; Frohlich, H.; Zell, A. Vibration-based terrain classification using support vector machines. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Beijing, China, 9–15 October 2006. [Google Scholar]
- Weiss, C.; Fechner, N.; Stark, M.; Zell, A. Comparison of different approaches to vibration-based terrain classification. In Proceedings of the 3rd European Conference on Mobile Robots, Freiburg, Germany, 19–21 September 2007. [Google Scholar]
- Weiss, C.; Stark, M.; Zell, A. SVMs for Vibration-Based Terrain Classification. In Autonome Mobile Systeme 2007; Informatik Aktuell; Berns, K., Luksch, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Weiss, C.; Tamimi, H.; Zell, A. A combination of vision and vibration-based terrain classification. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, 22–26 September 2008. [Google Scholar]
- Komma, P.; Weiss, C.; Zell, A. Adaptive Bayesian filtering for vibration-based terrain classification. In Proceedings of the IEEE International Conference on Robotics and Automation(ICRA), Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Weiss, C.; Zell, A. Novelty detection and online learning for vibration-based terrain classification. In Proceedings of the 10th International Conference on Intelligent Autonomous Systems (IAS), Baden, Germany, July 2008; pp. 16–25. [Google Scholar]
- Ojeda, L.; Borenstein, J.; Witus, G.; Karlsen, R. Terrain characterization and classification with a mobile robot. J. Field Robot. 2006, 23, 103–122. [Google Scholar] [CrossRef] [Green Version]
- Hoepflinger, M.A.; Remy, C.D.; Hutter, M.; Spinello, L.; Siegwart, R. Haptic terrain classification for legged robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Bermudez, F.; Julian, R.; Haldane, D.; Abbeel, P.; Fearing, R. Performance analysis and terrain classification for a legged robot over rough terrain. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012. [Google Scholar]
- Park, B.; Kim, J.; Lee, J. Terrain feature extraction and classification for mobile robots utilizing contact sensors on rough terrain. In Proceedings of the International Symposium on Robotics and Intelligent Sensors, Sarawak, Malaysia, 4–6 September 2012. [Google Scholar]
- Collins, E.G.; Coyle, E.J. Vibration-based terrain classification using surface profile input frequency responses. In Proceedings of the IEEE International Conference on Robotics and Automation(ICRA), Pasadena, CA, USA, 19–23 May 2008. [Google Scholar]
- Tick, D.; Rahman, T.; Busso, C.; Gans, N. Indoor robotic terrain classification via angular velocity based hierarchical classifier selection. In Proceedings of the IEEE International Conference on Robotics and Automation(ICRA), Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar]
- Dupont, E.; Moore, C.; Collins, E.; Coyle, E. Frequency response method for terrain classification in autonomous ground vehicles. Auton. Robot. 2008, 24, 337–347. [Google Scholar] [CrossRef]
- Dupont, E.; Moore, C.; Roberts, R. Terrain Classification for mobile robots traveling at various speeds: An eigenspace manifold approach. In Proceedings of the IEEE International Conference on Robotics and Automation(ICRA), Pasadena, CA, USA, 19–23 May 2008. [Google Scholar]
- Mei, M.; Chang, J.; Li, Y.; Li, Z.; Li, X.; Lv, W. Comparative study of different methods in vibration-based terrain classification for wheeled robots with shock absorbers. Sensors 2019, 19, 1137. [Google Scholar] [CrossRef] [PubMed]
- Kolvenbach, H.; Bartschi, C.; Wellhausen, L.; Grandia, R.; Hutter, M. Haptic inspection of planetary soils with legged robots. IEEE Robot. Autom. Lett. 2019, 4, 1626–1632. [Google Scholar] [CrossRef]
- Lomio, F.; Skenderi, E.; Mohamadi, D.; Collin, J.; Ghabcheloo, R.; Huttunen, H. Surface type classification for autonomous robot indoor navigation. arXiv 2019, arXiv:1905.00252v1. [Google Scholar]
- Cunningham, C.; Whittaker, W.; Nesnas, I. Improving slip prediction on mars using thermal inertia measurements. Auton. Robot. 2019, 43, 503–521. [Google Scholar] [CrossRef]
- Wang, S. Road Terrain Classification Technology for Autonomous Vehicle; Springer: Berlin, Germany, 2019. [Google Scholar]
- Krizhevsky, A.; Suyskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; Volume 25. [Google Scholar]
- Liu, W.; Wen, Y.; Yu, Z.; Yang, M. Large-margin softmax loss for convolutional neural networks. In Proceedings of the 33rd International Conference on Machine Learning (ICML), New York, NY, USA, 9 June 2016. [Google Scholar]
- Hu, K.; Zhang, Z.; Niu, X.; Zhang, Y.; Cao, C.; Xiao, F.; Gao, X. Retinal vessel segmentation of color fundus images using multiscale convolutional neural network with an improved cross-entropy loss function. Neurocomputing 2018, 309, 179–191. [Google Scholar] [CrossRef]
- Bai, C.; Guo, J.; Zheng, H. Three-dimensional vibration-based terrain classification for mobile robots. IEEE Access 2019, 7, 63485–63492. [Google Scholar] [CrossRef]
- Bwbot. XQ Unmanned Vehicle Platform. Available online: http://www.bwbot.org/zh-cn/products/xiaoqiang-4-pro (accessed on 05 January 2018).
- Clearpath. Jackal Unmanned Vehicle Platform. Available online: https://www.clearpathrobotics.com/jackal-small-unmanned-ground-vehicle/ (accessed on 17 February 2018).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | #1 | #2 | #3 | #4 | #5 |
|---|---|---|---|---|---|
| Test Terrain | brick | sand | flat | cement | soil |
| Collect Data | 120 sets | 120 sets | 120 sets | 120 sets | 120 sets |
| Total Data | 600 sets (Training samples: 500 sets; Test samples: 100sets) | ||||
| Test Velocity | 0.2 m/s, 0.4 m/s, 0.6 m/s | ||||
| Test Platform | Clearpath Jackal, XQ | ||||
| Experiment | Accuracy #1 | Accuracy #2 | Accuracy #3 | Accuracy #4 | Accuracy #5 |
|---|---|---|---|---|---|
| 1 | 0.8571 | 0.9487 | 0.9500 | 0.7674 | 0.9459 |
| 2 | 0.7857 | 0.9487 | 0.9250 | 0.7906 | 0.8918 |
| 3 | 0.7500 | 0.9230 | 0.9750 | 0.8372 | 0.8108 |
| 4 | 0.7857 | 0.9230 | 0.9250 | 0.7674 | 0.8648 |
| 5 | 0.8214 | 0.9487 | 0.9250 | 0.7674 | 0.8648 |
| Experiment | Accuracy #1 | Accuracy #2 | Accuracy #3 | Accuracy #4 | Accuracy #5 |
|---|---|---|---|---|---|
| 0.8979 | 0.8524 | 0.8545 | 0.8363 | 0.8852 | |
| 0.8367 | 0.9180 | 0.9636 | 0.9454 | 0.9508 | |
| 0.8571 | 0.9508 | 0.8000 | 0.9818 | 0.8688 |
| Platform | Speed | Accuracy #1 | Accuracy #2 | Accuracy #3 | Accuracy #4 | Accuracy #5 |
|---|---|---|---|---|---|---|
| Jackal | 0.8979 | 0.8524 | 0.8545 | 0.8363 | 0.8852 | |
| 0.8367 | 0.9180 | 0.9636 | 0.9454 | 0.9508 | ||
| 0.8571 | 0.9508 | 0.8000 | 0.9818 | 0.8688 | ||
| XQ | 0.9387 | 0.9672 | 0.8545 | 0.9818 | 0.9836 | |
| 0.9387 | 0.9508 | 0.9636 | 0.9818 | 0.9344 | ||
| 0.9183 | 0.9016 | 0.9090 | 0.9859 | 0.9508 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, C.; Guo, J.; Guo, L.; Song, J. Deep Multi-Layer Perception Based Terrain Classification for Planetary Exploration Rovers. Sensors 2019, 19, 3102. https://doi.org/10.3390/s19143102
Bai C, Guo J, Guo L, Song J. Deep Multi-Layer Perception Based Terrain Classification for Planetary Exploration Rovers. Sensors. 2019; 19(14):3102. https://doi.org/10.3390/s19143102
Chicago/Turabian StyleBai, Chengchao, Jifeng Guo, Linli Guo, and Junlin Song. 2019. "Deep Multi-Layer Perception Based Terrain Classification for Planetary Exploration Rovers" Sensors 19, no. 14: 3102. https://doi.org/10.3390/s19143102
APA StyleBai, C., Guo, J., Guo, L., & Song, J. (2019). Deep Multi-Layer Perception Based Terrain Classification for Planetary Exploration Rovers. Sensors, 19(14), 3102. https://doi.org/10.3390/s19143102