Night-Light Image Restoration Method Based on Night Scattering Model for Luojia 1-01 Satellite


Abstract
:1. Introduction
2. Degradation Model of Night-Light Image and Atmospheric Scattering Analysis
3. APSF Estimation Model of Luojia 1-01
4. Image Restoration Method of Luojia 1-01 Based on Night Scattering Model
4.1. Image Restoration Model of Night-Light Remote Sensing
4.2. Model Solution
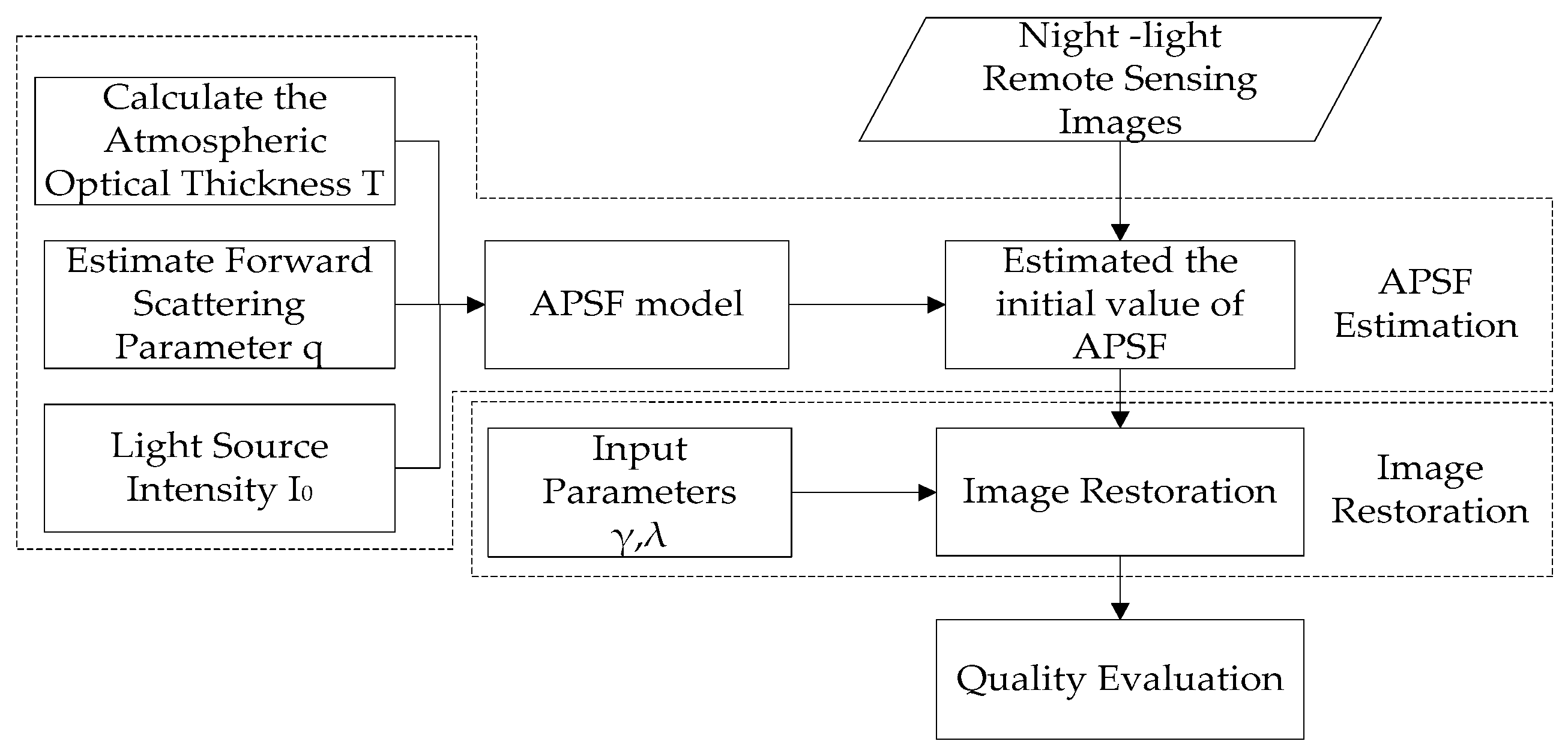
- Input the night-light remote sensing images taken by Luojia 1-01 satellite.
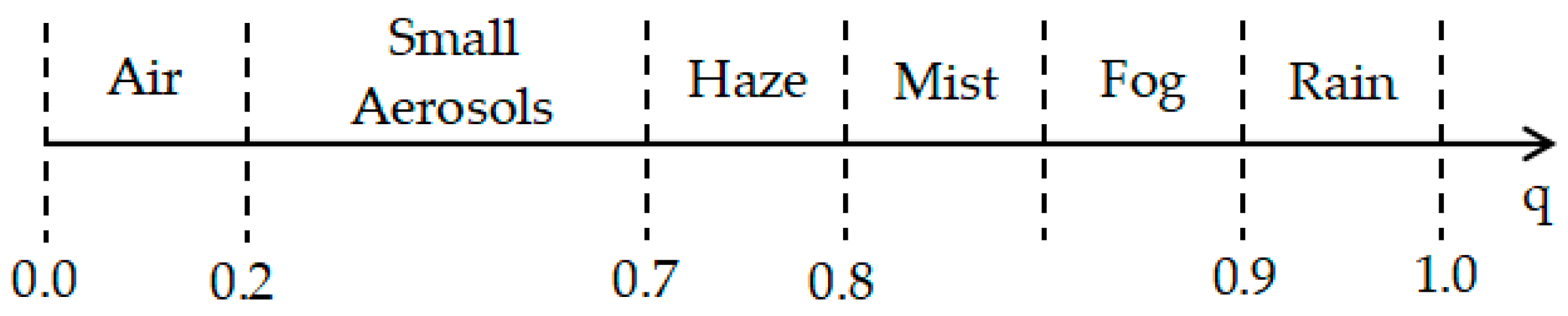
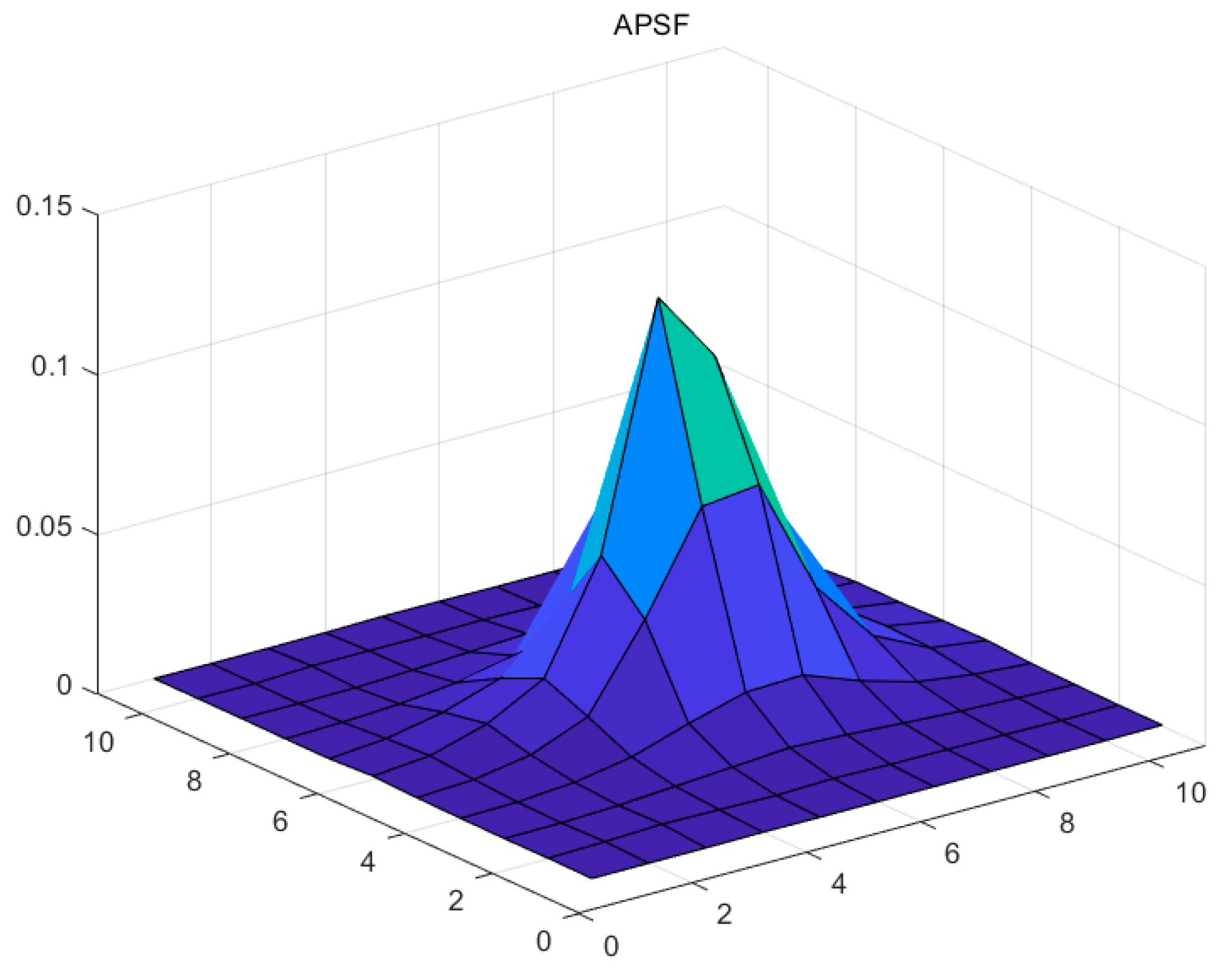
- Estimate the APSF of the image. The atmospheric optical thickness T is calculated, the forward scattering coefficient q is estimated according to the weather condition, and put T, q and the light source intensity I0 into the atmospheric point spread function model to calculate the APSF value of the image.
- Put APSF into the restoration model, and input parameters and , then perform image restoration with the Equation (8).
- Output the restored image and evaluate its quality.
5. APSF Estimation and Image Restoration Experiments in This Paper
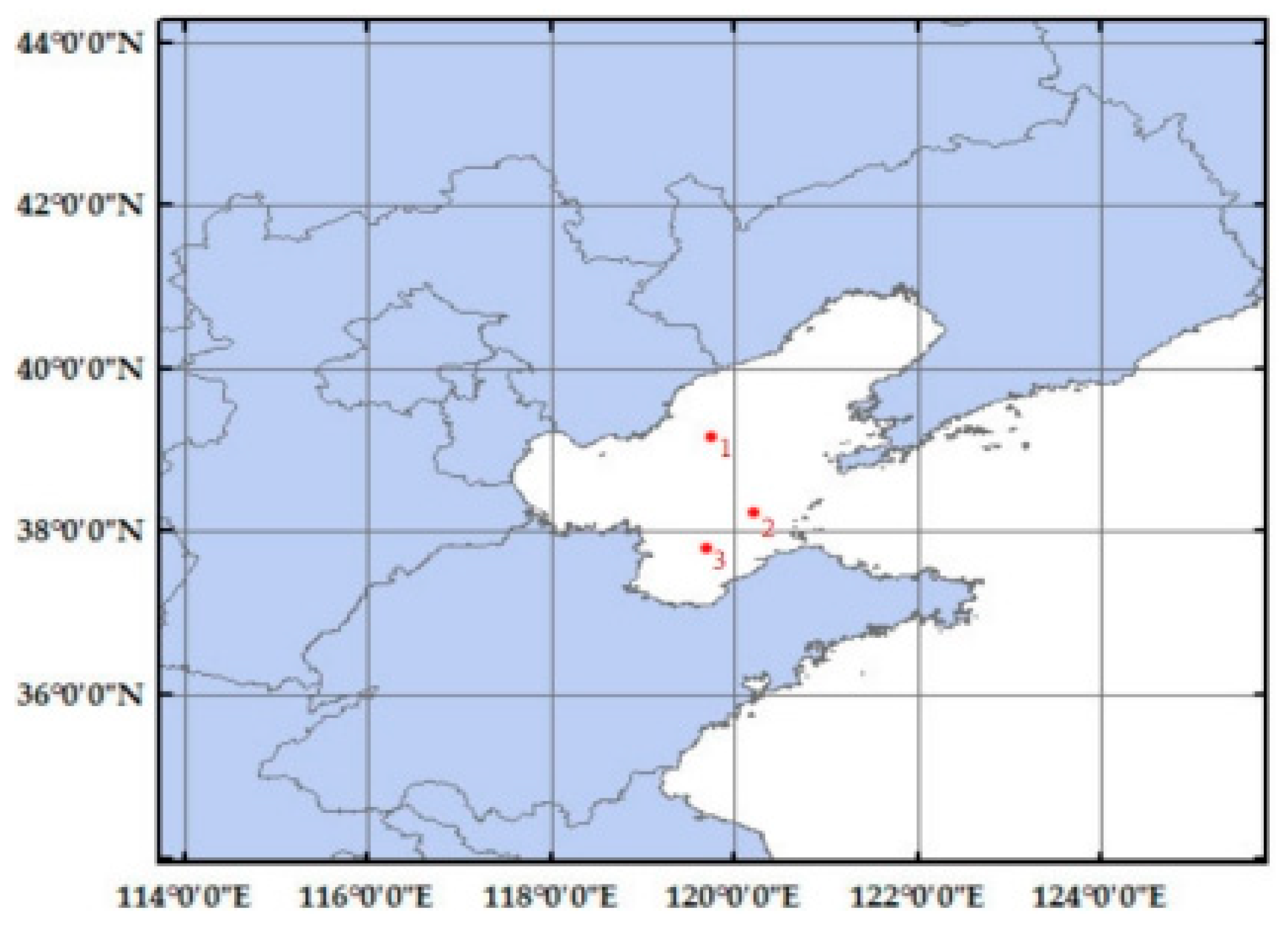
5.1. Introduction of Experimental Data
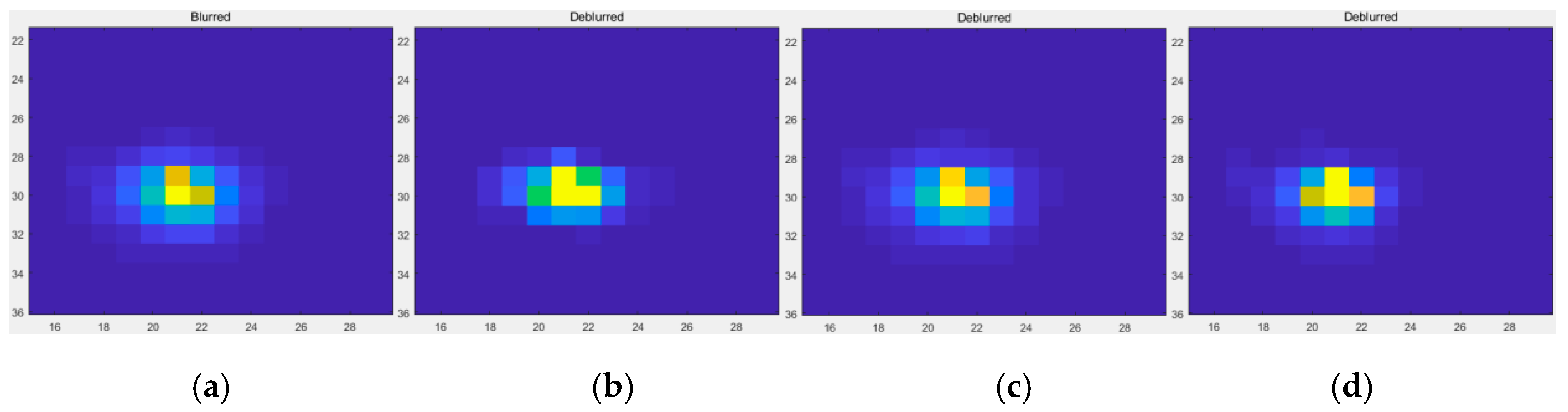
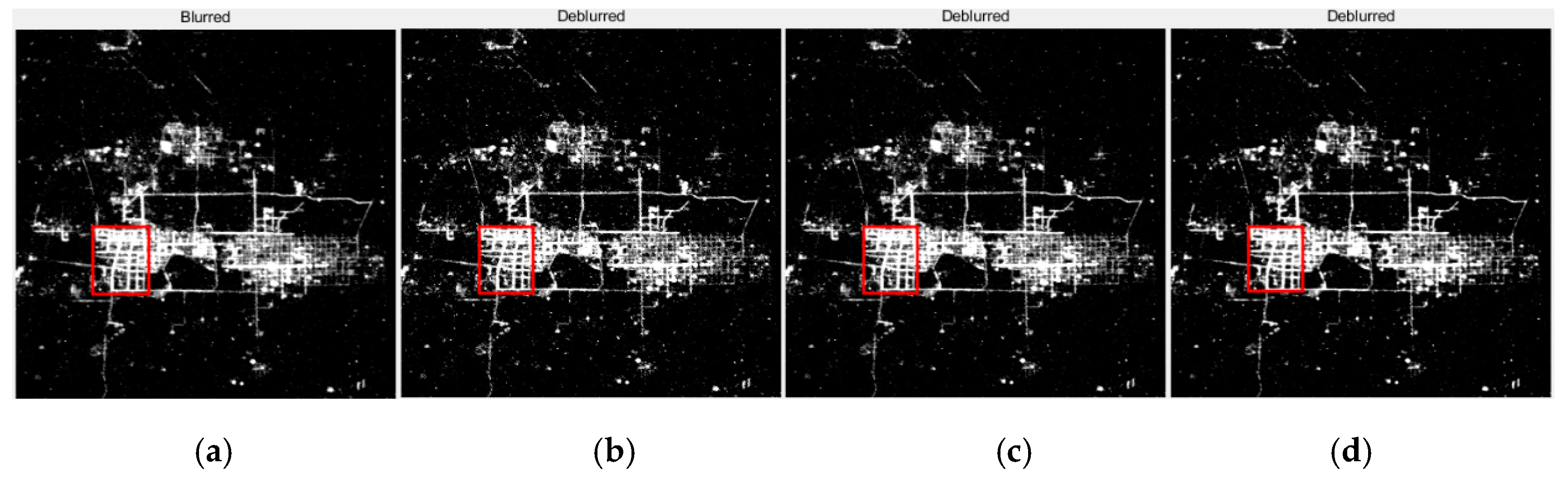
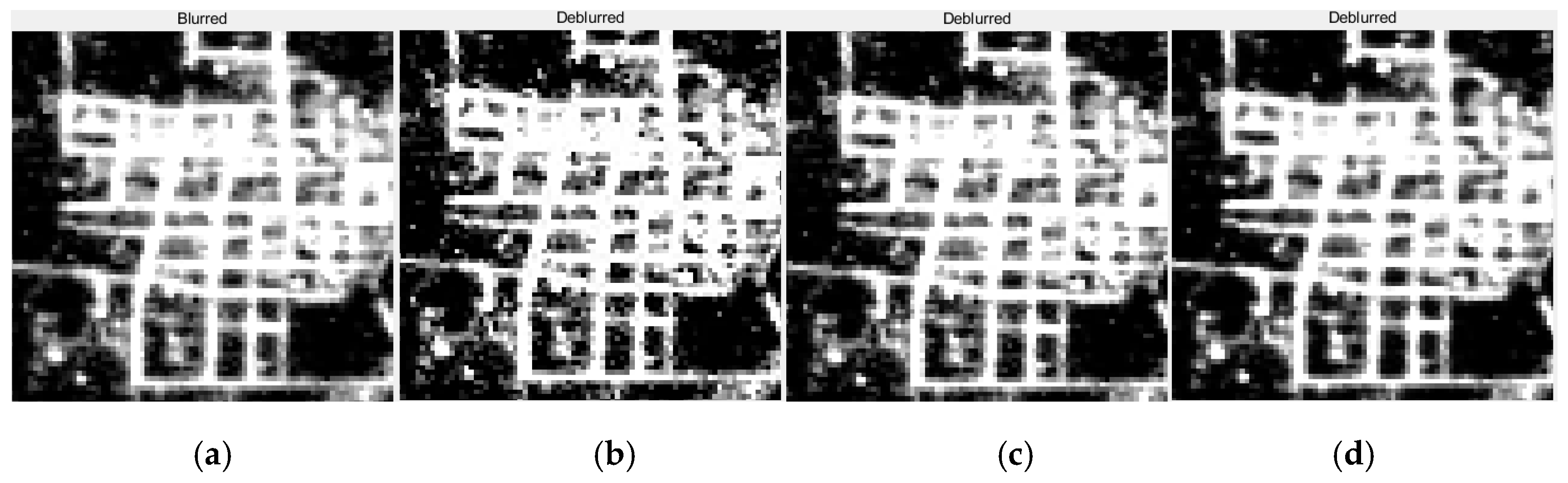
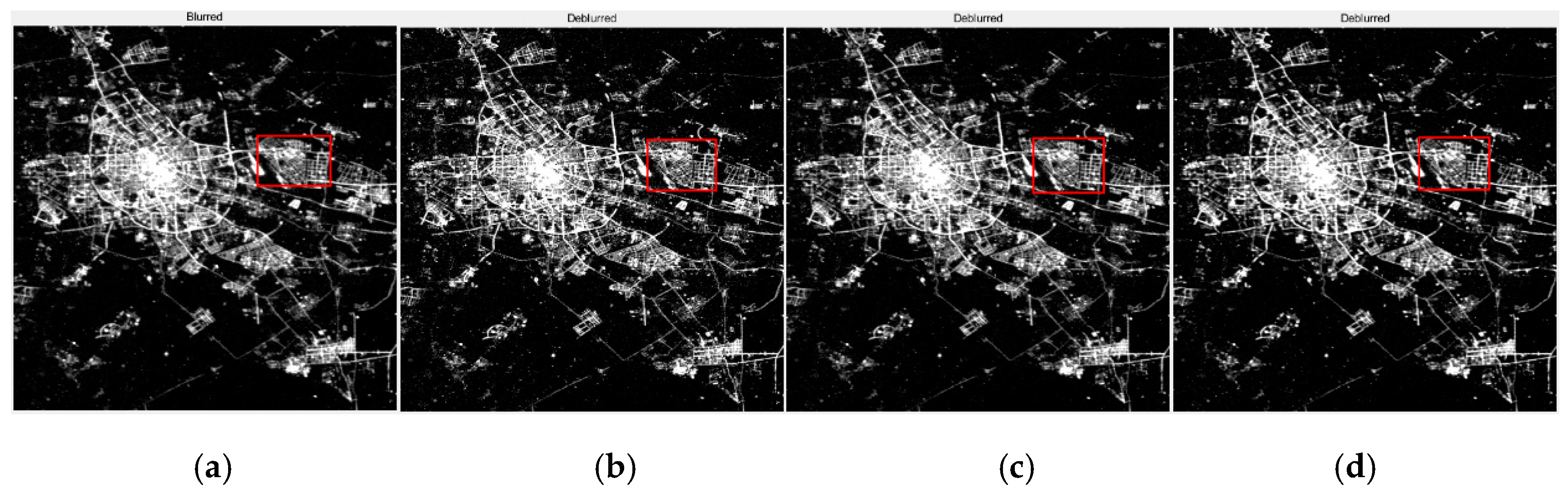
5.2. Results and Analysis
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, D.; Li, X. An overview on data mining of nighttime light remote sensing. Acta Geod. Cartogr. Sin. 2015, 44, 591–601. [Google Scholar]
- Bennett, M.M.; Smith, L.C. Advances in using multitemporal night-time lights satellite imagery to detect, estimate, and monitor socioeconomic dynamics. Remote Sens. Environ. 2017, 192, 176–197. [Google Scholar] [CrossRef]
- Li, X.; Li, D.; Xu, H.; Wu, C. Intercalibration between DMSP/OLS and VIIRS night-time light images to evaluate city light dynamics of Syria’s major human settlement during Syrian Civil War. Int. J. Remote Sens. 2017, 38, 5934–5951. [Google Scholar] [CrossRef]
- Zhang, G.; Li, L.; Jiang, Y.; Shen, X.; Li, D. On-Orbit Relative Radiometric Calibration of the Night-Time Sensor of the LuoJia1-01 Satellite. Sensors 2018, 18, 4225. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Wang, J.; Jiang, Y.; Zhou, P.; Zhao, Y.; Xu, Y. On-Orbit Geometric Calibration and Validation of Luojia 1-01 Night-Light Satellite. Remote Sens. 2019, 11, 264. [Google Scholar] [CrossRef]
- Zhang, G.; Guo, X.; Li, D.; Jiang, B. Evaluating the Potential of LJ1-01 Nighttime Light Data for Modeling Socio-Economic Parameters. Sensors 2019, 19, 1465. [Google Scholar] [CrossRef] [PubMed]
- Jiang, W.; He, G.; Long, T.; Guo, H.; Yin, R.; Leng, W.; Liu, H.; Wang, G. Potentiality of Using Luojia 1-01 Nighttime Light Imagery to Investigate Artificial Light Pollution. Sensors 2018, 18, 2900. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Li, D.; He, X.; Jendryke, M. A preliminary investigation of Luojia-1 night-time light imagery. Remote Sens. Lett. 2019, 10, 526–535. [Google Scholar] [CrossRef]
- Kimoto, Y.; Nemoto, N.; Matsumoto, H.; Ueno, K.; Goka, T.; Omodaka, T. Space radiation environment and its effects on satellites: Analysis of the first data from TEDA on board ADEOS-II. IEEE Trans. Nucl. Sci. 2005, 52, 1574–1578. [Google Scholar] [CrossRef]
- Sudey, J.; Schulman, J.R. In-orbit measurements of Landsat-4 thematic mapper dynamic disturbances. Acta Astronaut. 1985, 12, 485–503. [Google Scholar] [CrossRef]
- Toyoshima, M.; Araki, K. In-orbit measurements of short term attitude and vibrational environment on the Engineering Test Satellite VI using laser communication equipment. Opt. Eng. 2001, 40, 827–832. [Google Scholar]
- Li, X.; Ma, R.; Zhang, Q.; Li, D.; Liu, S.; He, T.; Zhao, L. Anisotropic characteristic of artificial light at night—Systematic investigation with VIIRS DNB multi-temporal observations. Remote Sens. Environ. 2019, 233, 111357. [Google Scholar] [CrossRef]
- Zhang, Y. The Improvement of Micro-Satellite’s Low-Light Remote Sensing Image Quality. Master’s Thesis, Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun, China, 1 October 2016. [Google Scholar]
- Qiu, X.; Dai, M.; Yin, C. UAV remote sensing atmospheric degradation image restoration based on multiple scattering APSF estimation. Optoelectron. Lett. 2017, 13, 386–391. [Google Scholar] [CrossRef]
- Hu, B.X.; Li, X.W.; Zhu, C.G.; Strahler, A.H. Deriving the Anisotropic Atmospheric Point Spread Function of Off-nadir Remote Sensing. J. Image Graph. 1996, 1, 19–29. [Google Scholar]
- Metari, S.; Deschênes, F. A new convolution kernel for atmospheric point spread function applied to computer vision. In Proceedings of the IEEE International Conference on Computer Vision, Rio DE janeiro, Brazil, 14–21 October 2007; pp. 1–8. [Google Scholar]
- He, R.; Wang, Z.; Fan, Y.; Dagan Feng, D. Multiple scattering model based single image dehazing. In Proceedings of the 8th Conference on Industrial Electronics and Applications, ICIEA, Melbourne, Australia, 19–21 June 2013; pp. 733–737. [Google Scholar]
- Guo, F.; Tang, J.; Xiao, X. Foggy Scene Rendering Based on Transmission Map Estimation. Int. J. Comput. Games Technol. 2014, 2014, 10. [Google Scholar] [CrossRef]
- Narasimhan, S.G.; Nayar, S.K. Shedding Light on the Weather. In Proceedings of the IEEE Computer Society Conference on Computer Vision & Pattern Recognition, Madison, WI, USA, 18–20 June 2003; pp. 1–8. [Google Scholar]
- Dowy, H.G.; Kareem, H.H.; Abood, Z.M.; Ghada, S.K. Blurred Image Restoration with Unknown Point Spread Function. Al-Mustansiriyah J. Sci. 2018, 29, 189–194. [Google Scholar] [Green Version]
- Yang, G.; Xing, Z.; Huang, W.; Wang, J. On-orbit MTF estimation and restoration for CCD cameras of environment and disaster reduction small satellites. China Univ. Min. Technol. 2012, 40, 481–486. [Google Scholar]
- Rudin, L.I.; Osher, S.; Fatemi, E. Nonlinear total variation based noise removal algorithms. Phys. D: Nonlinear Phenom. 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, C.; Luo, C. Estimation of CBERS-1 Point Spread Function and Image Restoration. J. Remote Sens. 2004, 8, 234–238. [Google Scholar]
- Bredies, K.; Lorenz, D.A. Iterated hard shrinkage for minimization problems with sparsity constraints. SIAM J. Sci. Comput. 2008, 30, 657–683. [Google Scholar] [CrossRef]
- Krishnan, D.; Tay, T.; Fergus, R. Blind deconvolution using a normalized sparsity measure. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. IEEE Computer Society, Washington, DC, USA, 20–25 June 2011; pp. 233–240. [Google Scholar]
- Tian, Q.; Zheng, L.; Tong, L. Image-based atmospheric radiation correction and refletance retrieval methods. J. Appl. Meteorol. 1998, 4, 456–461. [Google Scholar]
- Li, X.; Zhao, L.; Li, D.; Xu, H. Mapping Urban Extent Using Luojia 1-01 Nighttime Light Imagery. Sensors 2018, 18, 3665. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Huang, W.; Pan, Y.; Xu, M. Optimal PSF Estimation for Simple Optical System Using a Wide-Band Sensor Based on PSF Measurement. Sensors 2018, 18, 3552. [Google Scholar] [CrossRef] [PubMed]
- Rafael, C.; Woods, R.E. Digial Image Processing; Publishing House of Electronics Industry: Beijing, China, 2007. [Google Scholar]
- Qu, R. Regularization Image Restoration Methods Based on Point Spreed Function Estimation. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 1 June 2016. [Google Scholar]
- Cho, S.; Lee, S. Fast motion deblurring. ACM Trans. Graph. 2009, 28, 145. [Google Scholar] [CrossRef]
- Wu, G.; Luo, S. Adaptive fixed-point iterative shrinkage/thresholding algorithm for MR imaging reconstruction using compressed sensing. Magn. Reson. Imaging 2014, 32, 372–378. [Google Scholar] [CrossRef] [PubMed]
- Rubin, D.B. Iteratively reweighted Least Squares. In Encyclopedia of Statistical Sciences; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar] [CrossRef]
- Wang, Z. Technique of SAR Image Superrssolution; Science Press: Beijing, China, 2007. [Google Scholar]
- Zhai, Y.; Zhou, D.; Liu, Y.; Liu, S.; Peng, K. Design of performance evaluation index focusing function and selection of optimal function. Opt. J. 2011, 4, 242–252. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Areas | Imaging Time (UTC) | Weather Condition | Positioning Accuracy/m | Spatial Resolution/m | Characteristics of Experimental Areas |
|---|---|---|---|---|---|
| Three isolated point light sources | 2018.10.29 14:17:34 | Clear | 82 | 130 | The image quality of point light source is good, clear and bright, without interference from other light sources. |
| Dongying | 2018.10.29 14:17:34 | Clear | 82 | 130 | Geography plays an important role in the Bohai economic zone. |
| Tianjin | 2018.10.29 14:17:34 | Clear | 82 | 130 | The largest open coastal city in northern China, with a large population, plays an important geographical, economic and social role. |
| 2018.09.26 14:12:10 | Haze | 399 |
| 0.0000 | 0.0000 | 0.0000 | 0.0001 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0001 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.0001 | 0.0005 | 0.0012 | 0.0009 | 0.0006 | 0.0011 | 0.0007 | 0.0006 | 0.0004 | 0.0001 | 0.0001 |
| 0.0000 | 0.0001 | 0.0008 | 0.0020 | 0.0032 | 0.0045 | 0.0038 | 0.0026 | 0.0016 | 0.0009 | 0.0003 |
| 0.0001 | 0.0004 | 0.0018 | 0.0049 | 0.0106 | 0.0156 | 0.0162 | 0.0096 | 0.0045 | 0.0020 | 0.0007 |
| 0.0003 | 0.0012 | 0.0041 | 0.0113 | 0.0369 | 0.0675 | 0.0695 | 0.0326 | 0.0127 | 0.0041 | 0.0016 |
| 0.0008 | 0.0024 | 0.0076 | 0.0170 | 0.0508 | 0.1267 | 0.1035 | 0.0539 | 0.0165 | 0.0047 | 0.0015 |
| 0.0000 | 0.0015 | 0.0050 | 0.0108 | 0.0194 | 0.0646 | 0.0581 | 0.0331 | 0.0101 | 0.0038 | 0.0011 |
| 0.0000 | 0.0004 | 0.0013 | 0.0032 | 0.0069 | 0.0113 | 0.0126 | 0.0095 | 0.0041 | 0.0021 | 0.0012 |
| 0.0001 | 0.0000 | 0.0002 | 0.0009 | 0.0018 | 0.0027 | 0.0029 | 0.0026 | 0.0016 | 0.0008 | 0.0001 |
| 0.0001 | 0.0000 | 0.0007 | 0.0007 | 0.0006 | 0.0008 | 0.0004 | 0.0004 | 0.0005 | 0.0006 | 0.0001 |
| 0.0001 | 0.0000 | 0.0000 | 0.0001 | 0.0004 | 0.0003 | 0.0001 | 0.0001 | 0.0004 | 0.0001 | 0.0000 |
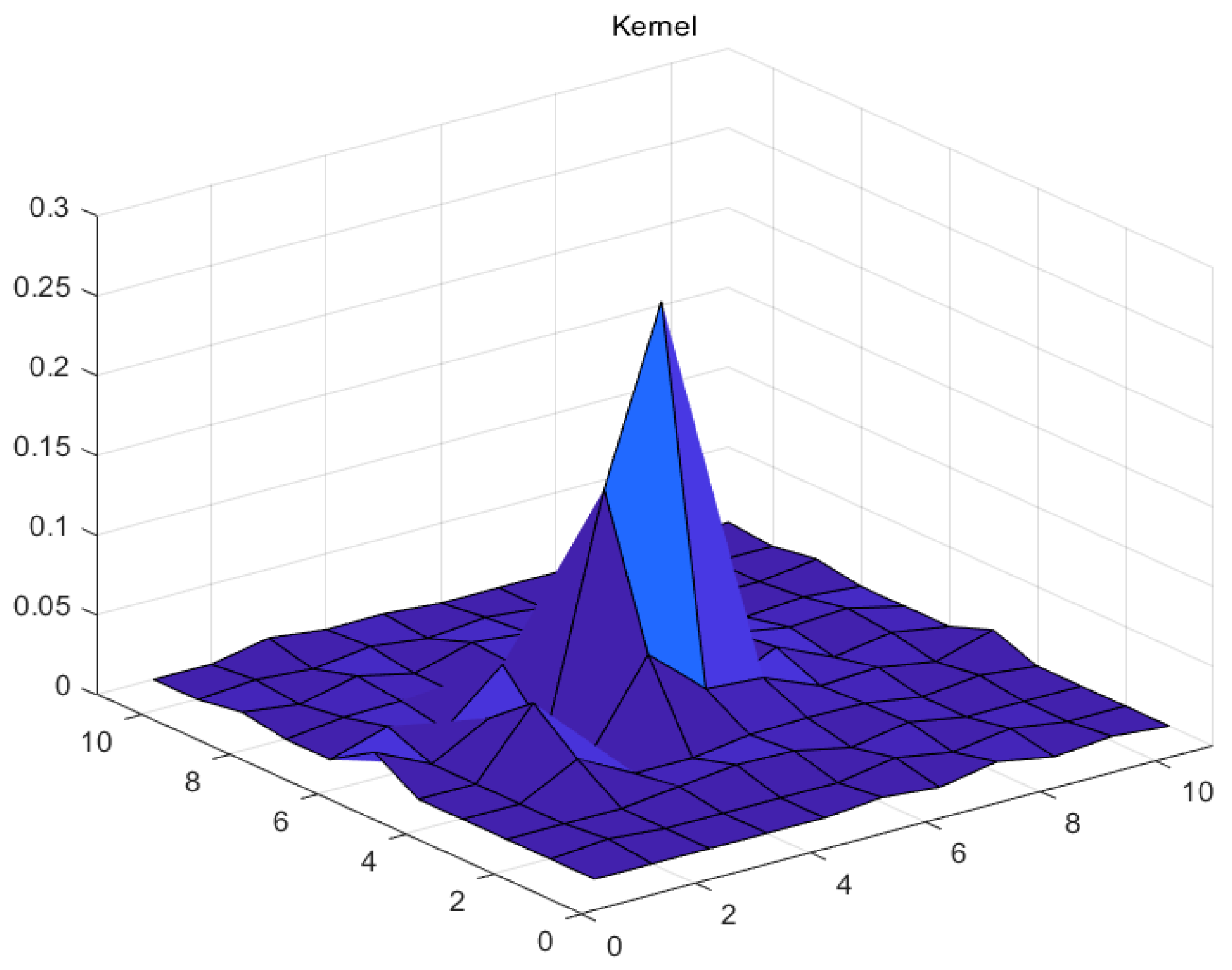
| 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0032 | 0.0000 | 0.0064 | 0.0000 | 0.0031 | 0.0000 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.0000 | 0.0032 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0060 | 0.0000 | 0.0051 | 0.0000 | 0.0000 |
| 0.0000 | 0.0000 | 0.0000 | 0.0042 | 0.0082 | 0.0074 | 0.0000 | 0.0063 | 0.0000 | 0.0000 | 0.0000 |
| 0.0000 | 0.0000 | 0.0185 | 0.0000 | 0.0000 | 0.0050 | 0.0062 | 0.0055 | 0.0000 | 0.0038 | 0.0000 |
| 0.0000 | 0.0000 | 0.0411 | 0.0000 | 0.0524 | 0.0213 | 0.0186 | 0.0040 | 0.0059 | 0.0000 | 0.0103 |
| 0.0170 | 0.0000 | 0.0193 | 0.0000 | 0.1434 | 0.2516 | 0.0000 | 0.0157 | 0.0000 | 0.0057 | 0.0000 |
| 0.0000 | 0.0110 | 0.0000 | 0.0307 | 0.0160 | 0.1125 | 0.0000 | 0.0123 | 0.0063 | 0.0083 | 0.0000 |
| 0.0000 | 0.0044 | 0.0049 | 0.0000 | 0.0080 | 0.0000 | 0.0101 | 0.0000 | 0.0000 | 0.0031 | 0.0000 |
| 0.0046 | 0.0000 | 0.0080 | 0.0000 | 0.0099 | 0.0064 | 0.0059 | 0.0061 | 0.0000 | 0.0000 | 0.0046 |
| 0.0000 | 0.0028 | 0.0000 | 0.0045 | 0.0000 | 0.0035 | 0.0000 | 0.0000 | 0.0028 | 0.0000 | 0.0000 |
| 0.0000 | 0.0000 | 0.0068 | 0.0027 | 0.0028 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0027 |
| Variance | Point 1 | Point 2 | Point 3 | Dongying | Tianjin |
|---|---|---|---|---|---|
| The original image | 10.21 | 9.46 | 9.37 | 60.77 | 67.20 |
| The method used by this paper | 11.95 | 11.35 | 10.87 | 64.49 | 71.98 |
| Method Two | 10.38 | 9.68 | 9.73 | 61.88 | 68.45 |
| Method Three | 10.63 | 10.01 | 10.17 | 61.94 | 70.05 |
| TenenGrad | Point 1 | Point 2 | Point 3 | Dongying | Tianjin |
|---|---|---|---|---|---|
| The original image | 3.57 | 2.80 | 2.91 | 2517.4 | 4953.6 |
| The method of this paper | 6.76 | 4.93 | 4.80 | 5775 | 14122 |
| Method Two | 4.18 | 3.18 | 3.66 | 3357.1 | 6696 |
| Method Three | 5.18 | 4.02 | 4.76 | 3402.5 | 7240.4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bu, L.; Xu, Z.; Zhang, G.; Zhang, Z. Night-Light Image Restoration Method Based on Night Scattering Model for Luojia 1-01 Satellite. Sensors 2019, 19, 3761. https://doi.org/10.3390/s19173761
Bu L, Xu Z, Zhang G, Zhang Z. Night-Light Image Restoration Method Based on Night Scattering Model for Luojia 1-01 Satellite. Sensors. 2019; 19(17):3761. https://doi.org/10.3390/s19173761
Chicago/Turabian StyleBu, Lijing, Zhenghui Xu, Guo Zhang, and Zhengpeng Zhang. 2019. "Night-Light Image Restoration Method Based on Night Scattering Model for Luojia 1-01 Satellite" Sensors 19, no. 17: 3761. https://doi.org/10.3390/s19173761
APA StyleBu, L., Xu, Z., Zhang, G., & Zhang, Z. (2019). Night-Light Image Restoration Method Based on Night Scattering Model for Luojia 1-01 Satellite. Sensors, 19(17), 3761. https://doi.org/10.3390/s19173761