Automatic Tunnel Steel Arches Extraction Algorithm Based on 3D LiDAR Point Cloud


Abstract
:1. Introduction
1.1. Related Works
1.2. Contributions
2. Data Collection and Dataset
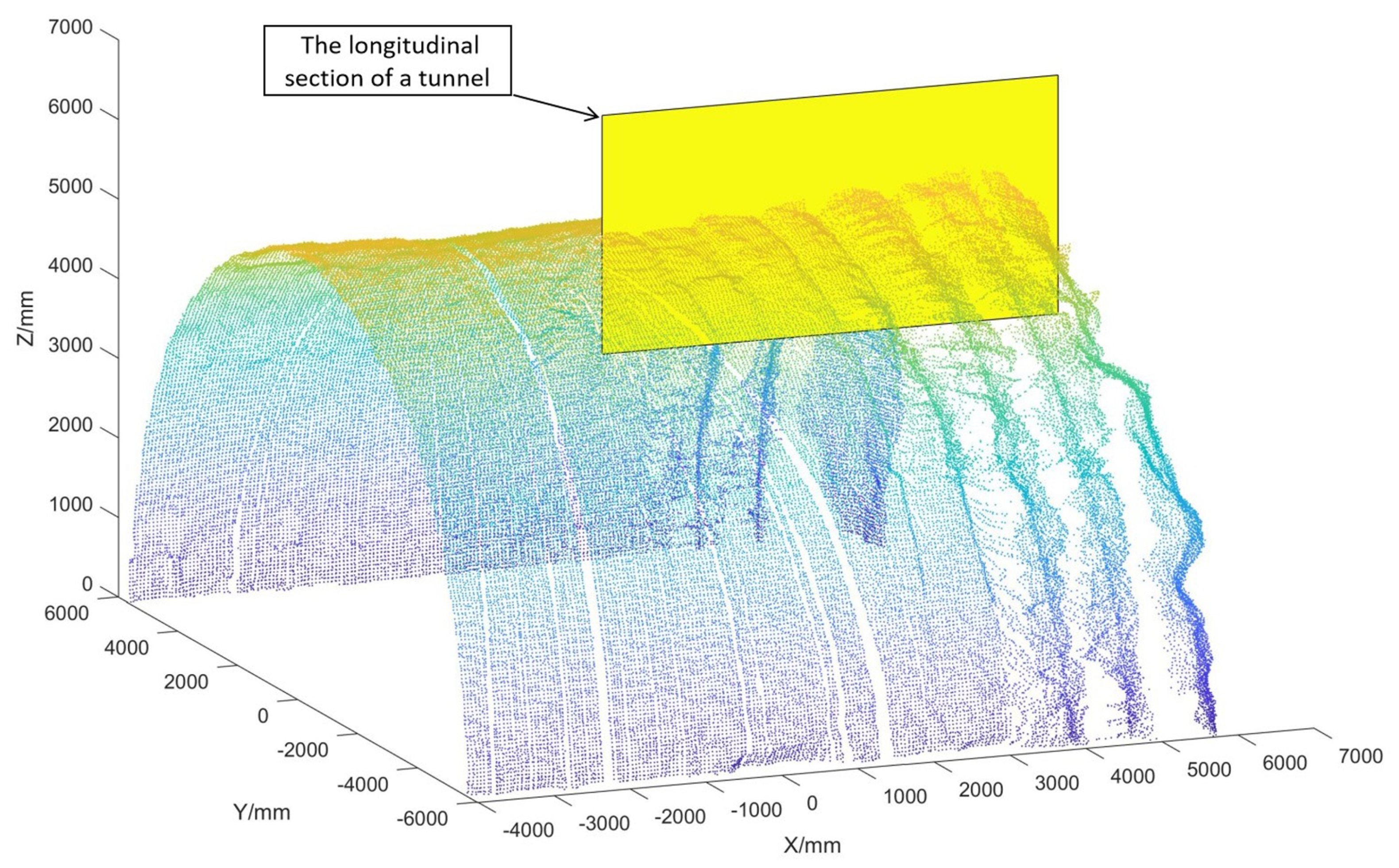
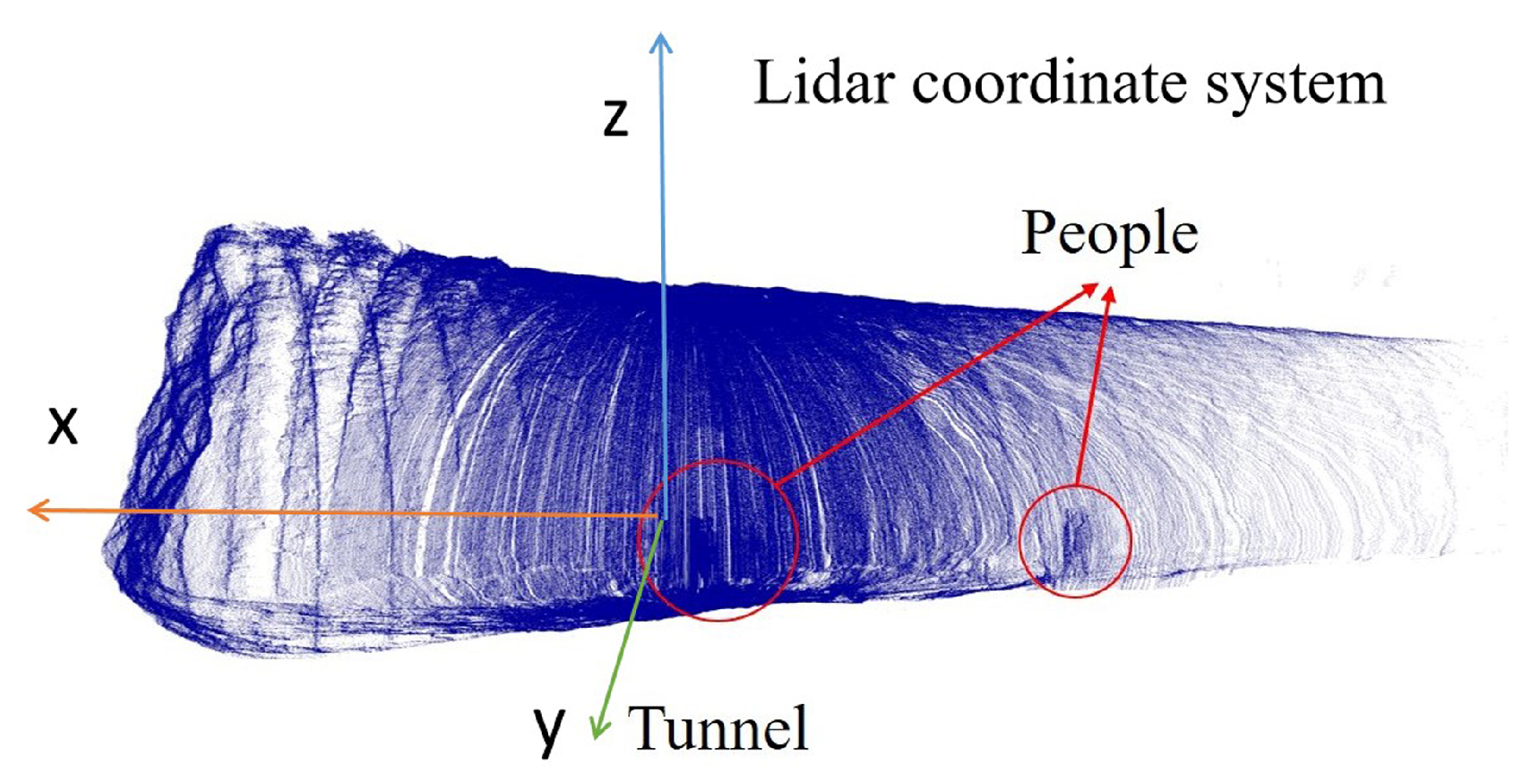
2.1. Data Acquisition Scenario
- The tunnel was of low visibility due to the dusty air and lack of lighting conditions.
- The 360 degree view or multiple view registration was needed for data scanning.
- During data collection, the steel arch would inevitably block the rear tunnel wall and result in missing data.
- In the tunnel construction site, non-staff were rarely allowed to enter, and the residence time was limited to avoid delaying the construction progress.
2.2. Acquisition Equipment
2.3. Pre-Processing of the Data
2.4. Data Set and Basic Parameters
3. Methodology
3.1. Overview of the Proposed Algorithm
3.2. Orientation Calibration
- Projection matrix: Firstly, we calculated the center of mass of the tunnel point cloud and shifted the coordinate origin of to . in Equation (2) was the projection matrix to project onto the Y–Z plane.
- Rotation matrix: Let be the rotation matrix that relates a certain vector in , and the corresponding rotated vector is . Given the rotation angle and the rotation axis (), according to the rotation formula in the paper [32], the vector can be represented as Equation (3), and the geometrical interpretation is shown in Figure 9. The rotation matrix can be obtained from Equation (4).
- Voxelized point cloud: Based on the thickness of the tunnel wall installed with the arches, we set B as the leaf size of voxelization. The unit vector parallel to the Z-axis is . We controlled the rotation step of the variation angle , which determines the calibration accuracy and time for computation. Then, the projected and voxelized point cloud of is .
- The density variance of the point cloud: For a random voxelized point cloud , we defined as the function to voxelize . During the sampling process, the number of the effective cells and the number of points contained in each effective cell were obtained. Then, the Projection Density Variance (PDV) of was defined as as in Equation (6).
- The optimum angle : With the rotation of , we obtained the optimum angle in the Rotational Projection Density Variance (RPDV) (Equation (7)) and the calibrated point cloud in Equation (8).As shown in Figure 10, the projection density follows the change of and shows a periodicity of 360. Due to the specific shape characteristic of the tunnel point cloud as a tensile surface, there is usually only one obvious optimal solution when changes within a range of 360, and the optimal angle values are rarely affected by a small number of outliers.
3.3. Extraction of Rock Surface
3.3.1. Curvature of the Point Cloud
3.3.2. DASST Used for Region-Growing
3.4. Extraction of Steel Arches
3.4.1. Feasible Methods
3.4.2. Steel Arch Extraction Based on DEG
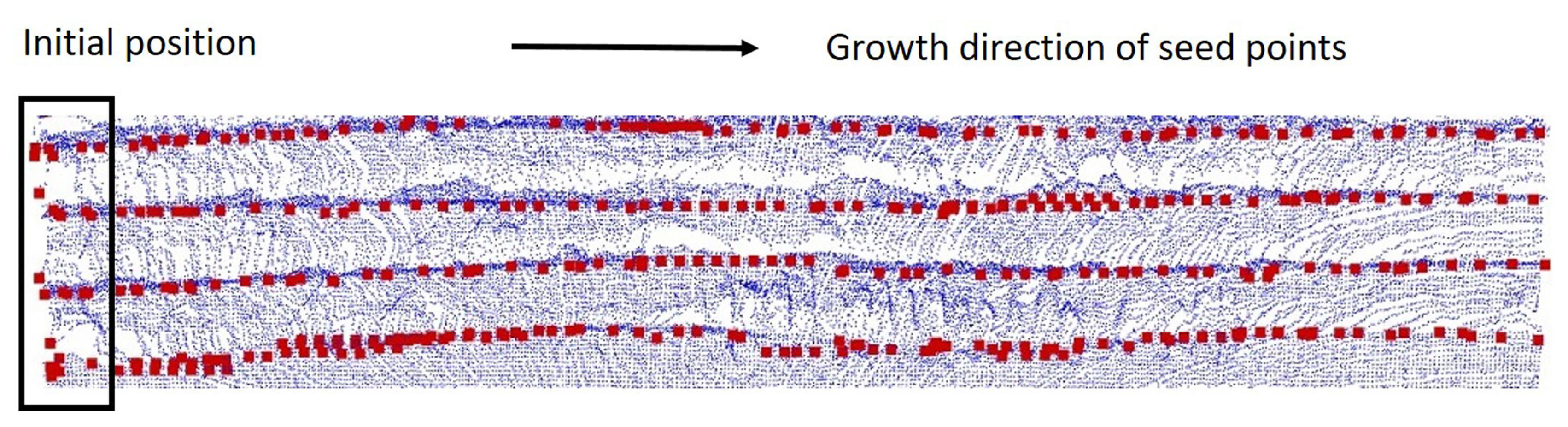
- The initial seed point is multiple, and distributed along the side of the point cloud. The Directed Edge Growing (DEG) method uses a line of seeds to extract points on the continuous bulges based on the region-growing method.
- The point at the lowest position in the neighborhood (edge point) is selected as the new seed point and stored in the arch feature set. The growth conditions of DEG are determined by the local normal saliency of the seed points. The most salient points in the local normal direction are searched in the candidate point neighbourhood within the searching radius, and stored in .
- Seed points should grow along a changing orientation of the local surface. When the neighbourhood point set is empty, seed points should be interpolated automatically.
- Initial pointA row of initial points were set uniformly at the starting position with the interval distance B.
- Initial seedwere found by searching the nearest point in by the Kd-tree method for every point in . In addition, the initial seeds belong to the optimum points. That means
- New seedThe direction vector for to reach a new seed point was obtained by moving along with the tunnel wall with the step size of . The vector and were obtained from Equations (25) and (26), respectively.Since is likely to be a point that does not exist in , its normal vector was assigned by the normal vector of the nearest point in .
- Optimum pointAll the candidate points were found by searching the points near within the distance B in ). As shown in Equation (28), the local normal saliency of point isIn order to ensure the integrity of steel arch extraction and reduce the impact of noise, the candidate points were sorted by their local normal saliency, and the most salient points were chosen to be added into the point cloud . The maximum number of elements in a salient point cloud is restricted to .Since there may be no other points around the seed point, there are two scenarios. In Equation (29), the interpolation of the missing point cloud is realized by directly assigning the seed point to the optimum point.The detailed interpolating effect of optimum points O are shown in Figure 15.
4. Experiment
4.1. Qualitative Analysis
4.2. Quantitative Analysis
4.3. Anti-Noise Performance
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| DEG | Directed Edge Growing |
| DBSCAN | Density-based spatial clustering of applications with noise |
| PCA | Principal Component Analysis |
| RPDV | Rotational Projection Density Variance |
| DASST | Differential Analysis for the Section Sequences of the Tunnel point cloud |
| RFPD | Robust Feature-Preserving Denoising |
References
- Rossi, A.; Vila, Y.; Lusiani, F.; Barsotti, L.; Sani, L.; Ceccarelli, P.; Lanzetta, M. Embedded smart sensor device in construction site machinery. Comput. Ind. 2019, 108, 12–20. [Google Scholar] [CrossRef]
- Fekete, S.; Diederichs, M.; Lato, M. Geotechnical and operational applications for 3-dimensional laser scanning in drill and blast tunnels. Tunn. Undergr. Space Technol. 2010, 25, 614–628. [Google Scholar] [CrossRef]
- Fei, X.; Li, S.C.; Zhang, Q.Q.; Li, L.P.; Shi, S.S.; Qian, Z. A new type support structure introduction and its contrast study with traditional support structure used in tunnel construction. Tunn. Undergr. Space Technol. 2017, 63, 171–182. [Google Scholar]
- Ni, H.; Lin, X.; Ning, X.; Zhang, J. Edge Detection and Feature Line Tracing in 3D-Point Clouds by Analyzing Geometric Properties of Neighborhoods. Remote Sens. 2016, 8, 710. [Google Scholar] [CrossRef]
- Liu, H.; Ye, Q.; Wang, H.; Chen, L.; Yang, J. A Precise and Robust Segmentation-Based Lidar Localization System for Automated Urban Driving. Remote Sens. 2019, 11, 1348. [Google Scholar] [CrossRef]
- Li, J.; Chen, S.; Zhang, F.; Li, E.; Yang, T.; Lu, Z. An Adaptive Framework for Multi-Vehicle Ground Speed Estimation in Airborne Videos. Remote Sens. 2019, 11, 1241. [Google Scholar] [CrossRef]
- Liu, J.; Li, D.; Feng, L.; Liu, P.; Wu, W. Towards Automatic Segmentation and Recognition of Multiple Precast Concrete Elements in Outdoor Laser Scan Data. Remote Sens. 2019, 11, 1383. [Google Scholar] [CrossRef]
- Maalek, R.; Lichti, D.D.; Ruwanpura, J.Y. Robust Segmentation of Planar and Linear Features of Terrestrial Laser Scanner Point Clouds Acquired from Construction Sites. Sensors 2018, 18, 819. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, J.; Chen, X.; Chu, T.; Liu, M.; Yang, T. Feature Surface Extraction and Reconstruction from Industrial Components Using Multistep Segmentation and Optimization. Remote Sens. 2018, 10, 1073. [Google Scholar] [CrossRef]
- Sinh Nguyen, V.; Hai Trinh, T.; Ha Tran, M. Hole boundary detection of a surface of 3D point clouds. In Proceedings of the IEEE 2015 International Conference on Advanced Computing and Applications (ACOMP), Ho Chi Minh City, Vietnam, 23–25 November 2015; pp. 124–129. [Google Scholar]
- Arastounia, M. Automated As-Built Model Generation of Subway Tunnels from Mobile LiDAR Data. Sensors 2016, 16, 1486. [Google Scholar] [CrossRef]
- Puente, I.; Akinci, B.; González-Jorge, H.; Díaz-Vilariño, L.; Arias, P. A semi-automated method for extracting vertical clearance and cross sections in tunnels using mobile LiDAR data. Tunn. Undergr. Space Technol. 2016, 59, 48–54. [Google Scholar] [CrossRef]
- Kang, Z.; Zhang, L.; Tuo, L.; Wang, B.; Chen, J. Continuous extraction of subway tunnel cross sections based on terrestrial point clouds. Remote Sens. 2014, 6, 857–879. [Google Scholar] [CrossRef]
- Zhu, N.; Jia, Y.; Luo, L. Tunnel point cloud filtering method based on elliptic cylindrical model. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, Prague, Czech Republic, 12–19 July 2016; Volume 41. [Google Scholar]
- Zhou, Y.; Wang, S.; Mei, X.; Yin, W.; Lin, C.; Hu, Q.; Mao, Q. Railway Tunnel Clearance Inspection Method Based on 3D Point Cloud from Mobile Laser Scanning. Sensors 2017, 17, 2055. [Google Scholar] [CrossRef] [PubMed]
- Gonçalves, J.; Mendes, R.; Araújo, E.; Oliveira, A.; Boavida, J. Planar projection of mobile laser scanning data in tunnels. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B3, 109–113. [Google Scholar]
- Han, J.Y.; Guo, J.; Jiang, Y.S. Monitoring tunnel deformations by means of multi-epoch dispersed 3D LiDAR point clouds: An improved approach. Tunn. Undergr. Space Technol. 2013, 38, 385–389. [Google Scholar] [CrossRef]
- Navarro, J.; Sanchidrián, J.; Segarra, P.; Castedo, R.; Costamagna, E.; López, L. Detection of potential overbreak zones in tunnel blasting from MWD data. Tunn. Undergr. Space Technol. 2018, 82, 504–516. [Google Scholar] [CrossRef]
- Costamagna, E.; Oggeri, C.; Segarra, P.; Castedo, R.; Navarro, J. Assessment of contour profile quality in D&B tunnelling. Tunn. Undergr. Space Technol. 2018, 75, 67–80. [Google Scholar]
- Gikas, V. Three-dimensional laser scanning for geometry documentation and construction management of highway tunnels during excavation. Sensors 2012, 12, 11249–11270. [Google Scholar] [CrossRef] [PubMed]
- Lai, P.; Samson, C. Applications of mesh parameterization and deformation for unwrapping 3D images of rock tunnels. Tunn. Undergr. Space Technol. 2016, 58, 109–119. [Google Scholar] [CrossRef]
- Charbonnier, P.; Chavant, P.; Foucher, P.; Muzet, V.; Prybyla, D.; Perrin, T.; Grussenmeyer, P.; Guillemin, S. Accuracy assessment of a canal-tunnel 3D model by comparing photogrammetry and laserscanning recording techniques. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-5/W2, 171–176. [Google Scholar] [CrossRef]
- Cheng, Y.J.; Qiu, W.; Lei, J. Automatic extraction of tunnel lining cross-sections from terrestrial laser scanning point clouds. Sensors 2016, 16, 1648. [Google Scholar] [CrossRef] [PubMed]
- Mah, J.; McKinnon, S.D.; Samson, C.; Thibodeau, D. Wire mesh filtering in 3D image data of rock faces. Tunn. Undergr. Space Technol. 2016, 52, 111–118. [Google Scholar] [CrossRef]
- Elberink, S.O.; Khoshelham, K. Automatic Extraction of Railroad Centerlines from Mobile Laser Scanning Data. Remote Sens. 2015, 7, 5565–5583. [Google Scholar] [CrossRef] [Green Version]
- Du, L.; Zhong, R.; Sun, H.; Liu, Y.; Wu, Q. Cross-section Positioning Based on a Dynamic MLS Tunnel Monitoring System. In The Photogrammetric Record; Wiley Online Library: Hoboken, NJ, USA, 2019. [Google Scholar]
- Wang, J.; Zheng, H.B.; Huang, H.; Ma, G.W. Point cloud modelling based on the tunnel axis and block estimation for monitoring the badaling tunnel, china. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W7, 301–306. [Google Scholar] [CrossRef]
- Orozhiyathumana Agnisarman, S.; Lopes, S.; Chalil Madathil, K.; Piratla, K.; Gramopadhye, A. A survey of automation-enabled human-in-the-loop systems for infrastructure visual inspection. Autom. Constr. 2019, 97, 52–76. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Attard, L.; Debono, C.; Valentino, G.; Castro, M.D. Tunnel inspection using photogrammetric techniques and image processing: A review. ISPRS J. Photogramm. Remote Sens. 2018, 144, 180–188. [Google Scholar] [CrossRef]
- Ke, Y. Extruded Surface Extraction Based on Unorganized Point Cloud in Reverse Engineering. J. Comput. Aided Des. Comput. Graph. 2005, 17, 1329–1334. [Google Scholar]
- Dam, E.; Koch, M.; Lillholm, M. Quaternions, Interpolation and Animation; Workingpaper; Department of Computer Science, University of Copenhagen: Copenhagen, Denmark, 1998. [Google Scholar]
- Derose, T.; Duchamp, T.; Mcdonald, J.; Stuetzle, W. Surface Reconstruction from Unorganized Points. ACM Siggraph Comput. Graph. 1992, 26, 71–78. [Google Scholar]
- Cao, J.; He, C.; Jie, Z.; Li, Y.; Liu, X.; Zou, C. Normal estimation via shifted neighborhood for point cloud. J. Comput. Appl. Math. 2017, 329, 57–67. [Google Scholar] [CrossRef]
- Cai, Z.; Ma, H.; Zhang, L. A Building Detection Method Based on Semi-Suppressed Fuzzy C-Means and Restricted Region Growing Using Airborne LiDAR. Remote Sens. 2019, 11, 848. [Google Scholar] [CrossRef]
- Lam, S.Y.W. Application of terrestrial laser scanning methodology in geometric tolerances analysis of tunnel structures. Tunn. Undergr. Space Technol. Incorp. Trenchless Technol. Res. 2006, 21, 410. [Google Scholar] [CrossRef]
- Han, J.Y.; Guo, J.; Jiang, Y.S. Monitoring tunnel profile by means of multi-epoch dispersed 3-D LiDAR point clouds. Tunn. Undergr. Space Technol. 2013, 33, 186–192. [Google Scholar] [CrossRef]
- Sipiran, I.; Bustos, B. Harris 3D: A robust extension of the Harris operator for interest point detection on 3D meshes. Vis. Comput. 2011, 27, 963–976. [Google Scholar] [CrossRef]
- Scovanner, P.; Ali, S.; Shah, M. A 3-dimensional sift descriptor and its application to action recognition. In Proceedings of the 15th ACM International Conference on Multimedia, Augsburg, Germany, 25–29 September 2007. [Google Scholar]
- Steder, B.; Rusu, R.B.; Konolige, K.; Burgard, W. Point feature extraction on 3D range scans taking into account object boundaries. In Proceedings of the IEEE International Conference on Robotics & Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Hang, S.; Maji, S.; Kalogerakis, E.; Learnedmiller, E. Multi-view Convolutional Neural Networks for 3D Shape Recognition. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 13–16 December 2015. [Google Scholar]
- Feng, Y.; Zhang, Z.; Zhao, X.; Ji, R.; Yue, G. GVCNN: Group-View Convolutional Neural Networks for 3D Shape Recognition. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 19–21 June 2018. [Google Scholar]
- Maturana, D.; Scherer, S. VoxNet: A 3D Convolutional Neural Network for Real-Time Object Recognition. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 922–928. [Google Scholar]
- Le, T.; Duan, Y. PointGrid: A Deep Network for 3D Shape Understanding. In Proceedings of the IEEE International Conference on Computer Vision, Salt Lake City, UT, USA, 19–21 June 2018; pp. 9204–9214. [Google Scholar] [CrossRef]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the IEEE Conference on Computer Vision & Pattern Recognition, Honolulu, HI, USA, 22–25 July 2017. [Google Scholar]
- Pan, J.; Fang, Z.; Chen, S.; Ge, H.; Hu, F.; Wang, M. An Improved Seeded Region Growing-Based Seamline Network Generation Method. Remote Sens. 2018, 10, 1065. [Google Scholar] [CrossRef]
- Wang, H.; Luo, H.; Wen, C.; Cheng, J.; Li, P.; Chen, Y.; Wang, C.; Li, J. Road boundaries detection based on local normal saliency from mobile laser scanning data. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2085–2089. [Google Scholar] [CrossRef]
- Haque, S.M.; Govindu, V.M. Robust feature-preserving denoising of 3D point clouds. In Proceedings of the IEEE 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 83–91. [Google Scholar]
- Yang, B.; Fang, L.; Li, J. Semi-automated extraction and delineation of 3D roads of street scene from mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2013, 79, 80–93. [Google Scholar] [CrossRef]
- Li, P.; Yong, Z.; Zhou, X. Displacement characteristics of high-speed railway tunnel construction in loess ground by using multi-step excavation method. Tunn. Undergr. Space Technol. Incorp. Trenchless Technol. Res. 2016, 51, 41–55. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Specifications | Advantages | Limitations |
|---|---|---|
| Total Station | High accuracy; Easy to locate | Time-consuming; Sparse points |
| RGB cameras | Dense and ordered point cloud | Insufficient light source in tunnels |
| LiDAR | High accuracy; Dense point cloud; Less impact from harsh environment | Non uniform point cloud |
| Laser Scanner | Scanning Angular Increment | Scan Range | Scanning Frequence | Rotary Table | Rotation Angular Increment | Absolute Accuracy of the LiDAR |
|---|---|---|---|---|---|---|
| P+F R2000 UHD | 0.05 | 30 m | 50 Hz | PT-GD201 | 0.05 | ±25 mm |
| ID | Number of Points | Number of Pre-Processed Points | Length (mm) | Observation Position (m) | (mm) | B (mm) |
|---|---|---|---|---|---|---|
| 1 | 3,741,570 | 538,935 | 28,247 | 75.0 | 1000 | 200 |
| 2 | 3,858,638 | 555,716 | 27,305 | 77.5 | 1000 | 200 |
| 3 | 1,616,947 | 232,991 | 17,720 | 82.4 | 1000 | 200 |
| 4 | 1,439,603 | 207,476 | 18,289 | 87.8 | 1000 | 200 |
| 5 | 1,546,882 | 222,809 | 17,786 | 95.6 | 1000 | 200 |
| 6 | 1,600,717 | 230,533 | 19,756 | 100.5 | 1000 | 200 |
| 7 | 2,240,123 | 322,657 | 16,660 | 105.9 | 1000 | 200 |
| 8 | 1,709,192 | 246,209 | 20,360 | 109.8 | 1000 | 200 |
| 9 | 2,265,829 | 326,387 | 17,913 | 121.3 | 1000 | 200 |
| Method | Method Principle | Limitations |
|---|---|---|
| Tunnel axis + Profile Radius [37] | Comparing the difference between the distance from the real arch profile to the tunnel axis and the distance from the standard arch profile to the tunnel axis. | The method is sensitive to the interference resulted from the steel mesh as well as the errors in the tunnel axis calibration, and the arch installation are inevitable. |
| Harris3D [38], SIFT3D [39] | These feature points were extended from the feature description method of 2D images, and are widely used for point cloud registration, recognition, and classification. | They are not applicable to distinguish steel arches from steel grids since steel arches arranged longitudinally and steel grids arranged horizontally have similar Harris3D and SIFT3D characteristics. |
| NARF [40] | The method can be used to take the center of the tunnel point cloud as the observation point and expand it into a range image for edge detection. | The recognition effect of the NARF method is unstable and needs to be improved. |
| Boundary detection [10] | Based on the given Euclidean distance and k-tree search method, the boundary of the hole is detected after the point cloud is triangulated. | The shielding effect of steel arches on laser results in multiple types of banded holes in the point cloud behind the arch. |
| region-growing | The seed points keep growing according to the characteristics of the surface until the seed points reach the boundary. | The segmentation effect depends on the given parameters and has poor adaptability to rough and complex surfaces. |
| MVCNN [41], GVCNN [42] | The 3D point cloud is projected into 2D images from multiple views, and CNN is used to extract features for each view in combination with the image processing method. | The projection method will lead to the loss of the key geometric spatial information of the arch structure, which will affect the segmentation accuracy of the point cloud. |
| Voxnet [41], PointGrid [44] | The disordered point cloud is voxelized into a regular structure, and then the neural network architecture is used to learn its characteristics. | Low efficiency of voxel grid arrangement; large memory occupied in the calculation process; time consuming; information loss. |
| Pointnet [41] | This method extracts the feature description of each independent point and the description of global point cloud features. Therefore, the point cloud of the steel arch area should be segmented into independent individuals to form a data set. | The relationship between points and neighborhood information is not considered, resulting in information loss when dealing with large-scale point cloud data. It can be used to detect the areas instead of the edge of the steel arches. |
| Step | Parameter | Meaning |
|---|---|---|
| RPDV | B | The grid size of RPDV |
| DASST | Radius used for calculating curves and normal vectors | |
| DASST | The slicing thickness of DASST | |
| DASST | The step size used for region-growing threshold | |
| DASST | The step size used for segmentation after DBSCAN | |
| DEG | B | Searching radius used for candidate points |
| DEG | B | Interval distance of initial points |
| DEG | The step size used for DEG | |
| DEG | Maximum number of elements in point cloud |
| ID | Method | Times | Parameter |
|---|---|---|---|
| 1 | Profile Radius [37] | 5.517 ms | Radius = Rs + 630→640 |
| 2 | NARF [40] | 6.179 ms | Search Radius = 100 mm |
| 3 | RFPD [48] + NARF [40] | 19.667 ms | Search Radius = 100 mm |
| 4 | Boundary detection [10] | 4.392 ms | Search Radius = 100 mm Normal Radius = 100 mm |
| 5 | region-growing | 7.198 ms | Curve threshold = 0.03 Normal threshold = 30 |
| 6 | The proposed method | 12.178 ms | = 1000 mm, B = 200 mm, |
| (RPDV + DASST + DEG) | = 26 mm |
| Difficulty | Profile Radius | NARF | RFPD + NARF | Boundary Detection | Region-Growing | Ours |
|---|---|---|---|---|---|---|
| The steel arch is askew | × | √ | √ | √ | √ | √ |
| Point cloud holes and defects | √ | √ | √ | × | √ | √ |
| Rocks of complex shapes | √ | × | × | √ | × | √ |
| Steel arches covered with concrete | √ | × | × | × | × | √ |
| The similar geometric characteristics of wire mesh and steel arch | × | × | × | × | × | √ |
| ID | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | Average |
|---|---|---|---|---|---|---|---|---|---|---|
| Precision | 0.907 | 0.926 | 0.919 | 0.913 | 0.928 | 0.924 | 0.923 | 0.941 | 0.909 | 0.921 |
| Recall | 0.914 | 0.901 | 0.918 | 0.907 | 0.875 | 0.899 | 0.855 | 0.904 | 0.843 | 0.891 |
| F-Score | 0.910 | 0.913 | 0.919 | 0.910 | 0.901 | 0.911 | 0.888 | 0.922 | 0.875 | 0.906 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Qiu, W.; Song, D.; Xie, B. Automatic Tunnel Steel Arches Extraction Algorithm Based on 3D LiDAR Point Cloud. Sensors 2019, 19, 3972. https://doi.org/10.3390/s19183972
Zhang W, Qiu W, Song D, Xie B. Automatic Tunnel Steel Arches Extraction Algorithm Based on 3D LiDAR Point Cloud. Sensors. 2019; 19(18):3972. https://doi.org/10.3390/s19183972
Chicago/Turabian StyleZhang, Wenting, Wenjie Qiu, Di Song, and Bin Xie. 2019. "Automatic Tunnel Steel Arches Extraction Algorithm Based on 3D LiDAR Point Cloud" Sensors 19, no. 18: 3972. https://doi.org/10.3390/s19183972
APA StyleZhang, W., Qiu, W., Song, D., & Xie, B. (2019). Automatic Tunnel Steel Arches Extraction Algorithm Based on 3D LiDAR Point Cloud. Sensors, 19(18), 3972. https://doi.org/10.3390/s19183972