Georeferencing of Laser Scanner-Based Kinematic Multi-Sensor Systems in the Context of Iterated Extended Kalman Filters Using Geometrical Constraints



Abstract
:1. Introduction
1.1. Georeferencing of Kinematic Multi-Sensor Systems
1.2. Kalman Filter Techniques for Georeferencing
1.3. Contribution
1.4. Outline
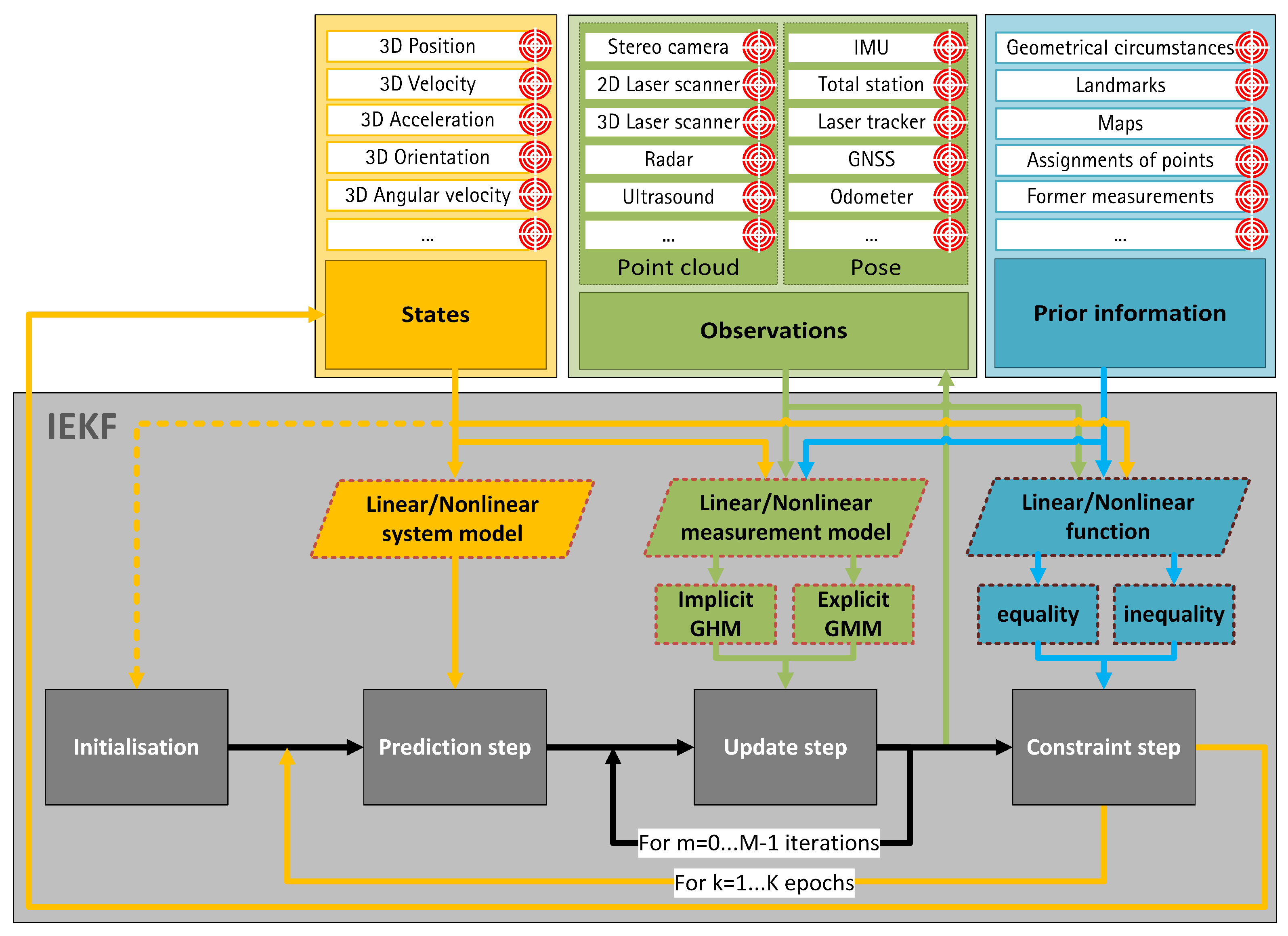
2. General Georeferencing Approach by Means of Recursive State Estimation
- Which types of sensor observations (e.g., laser scanner, GNSS, IMU, total station) are available and what are their accuracies?
- Which suitable and reliable prior information (e.g., geometrical circumstances, landmarks, maps) are available?
- What is the mathematical relationship between all input data?
- What information about the physical model of the system is known?
2.1. Iterated Extended Kalman Filter with Nonlinear Implicit Measurement Equation
| Algorithm 1: Iterated extended Kalman filter (IEKF) with nonlinear implicit measurement equation and nonlinear equality state constraints. |
 |
2.2. Inequality State Constraints by Means of Probability Density Function Truncation
| Algorithm 2: Probability density function (PDF) truncation for inequality state constraints. |
 |
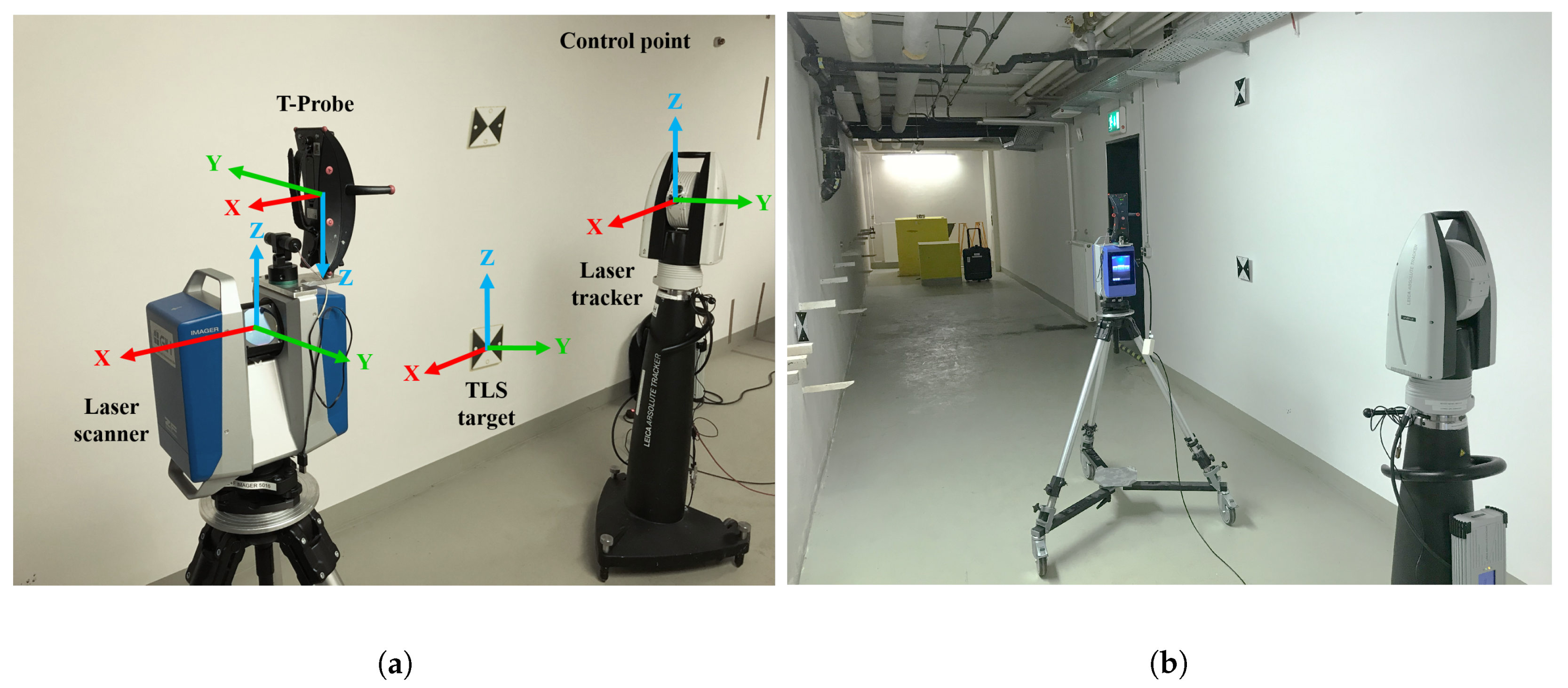
3. Application in Terms of Accurate Indoor Georeferencing of a k-TLS
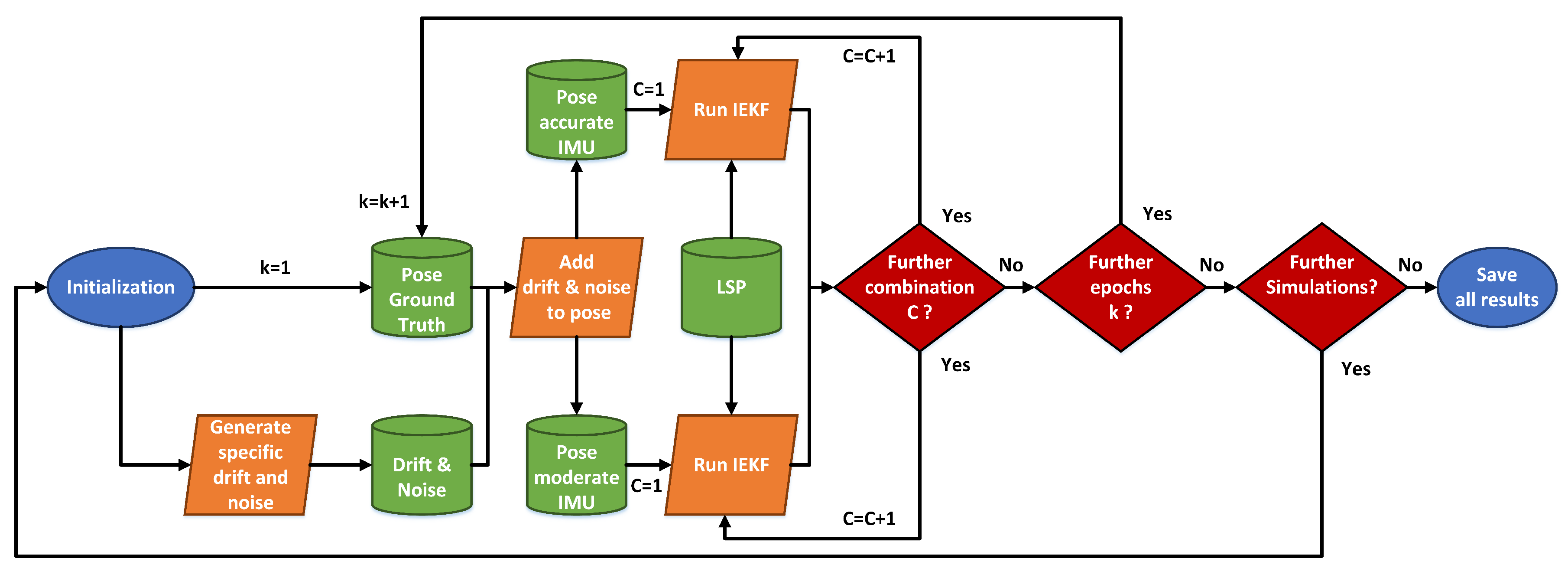
3.1. Overview
3.2. Methodology
3.2.1. Observation Vector
3.2.2. Assignment Algorithm for Distinctive Planes
3.2.3. Measurement Equation and State Parameter Vector
3.2.4. System Equation
3.2.5. Nonlinear Equality and Inequality Constraint for the State Parameters
3.2.6. Initialization
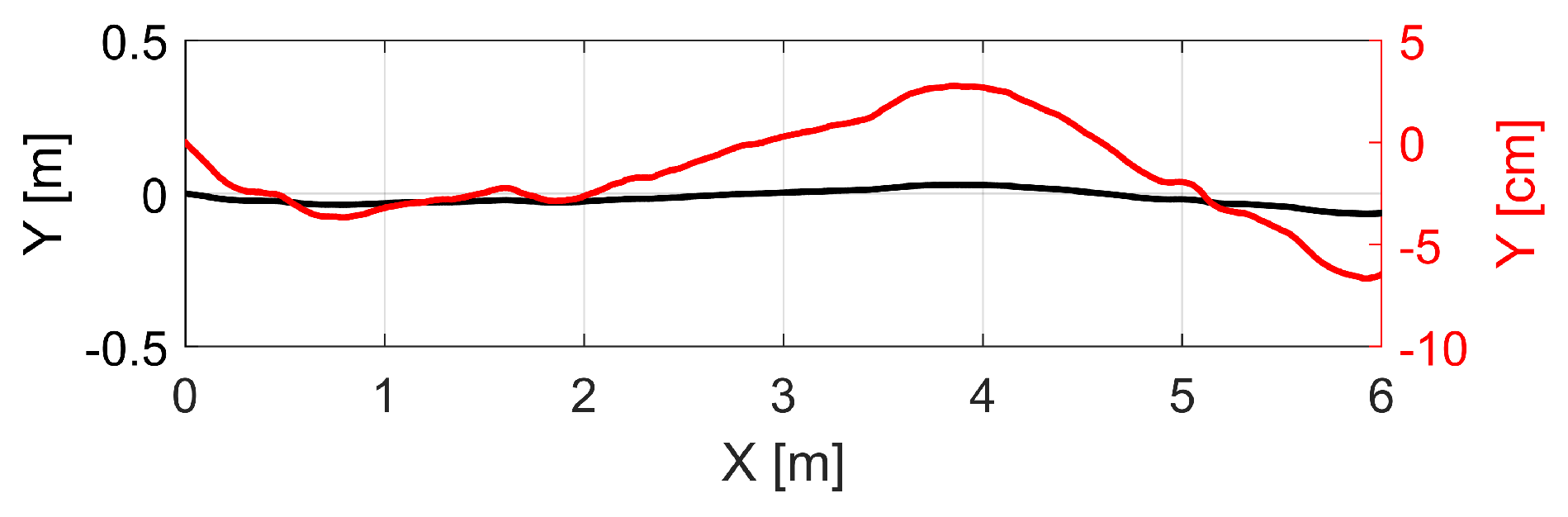
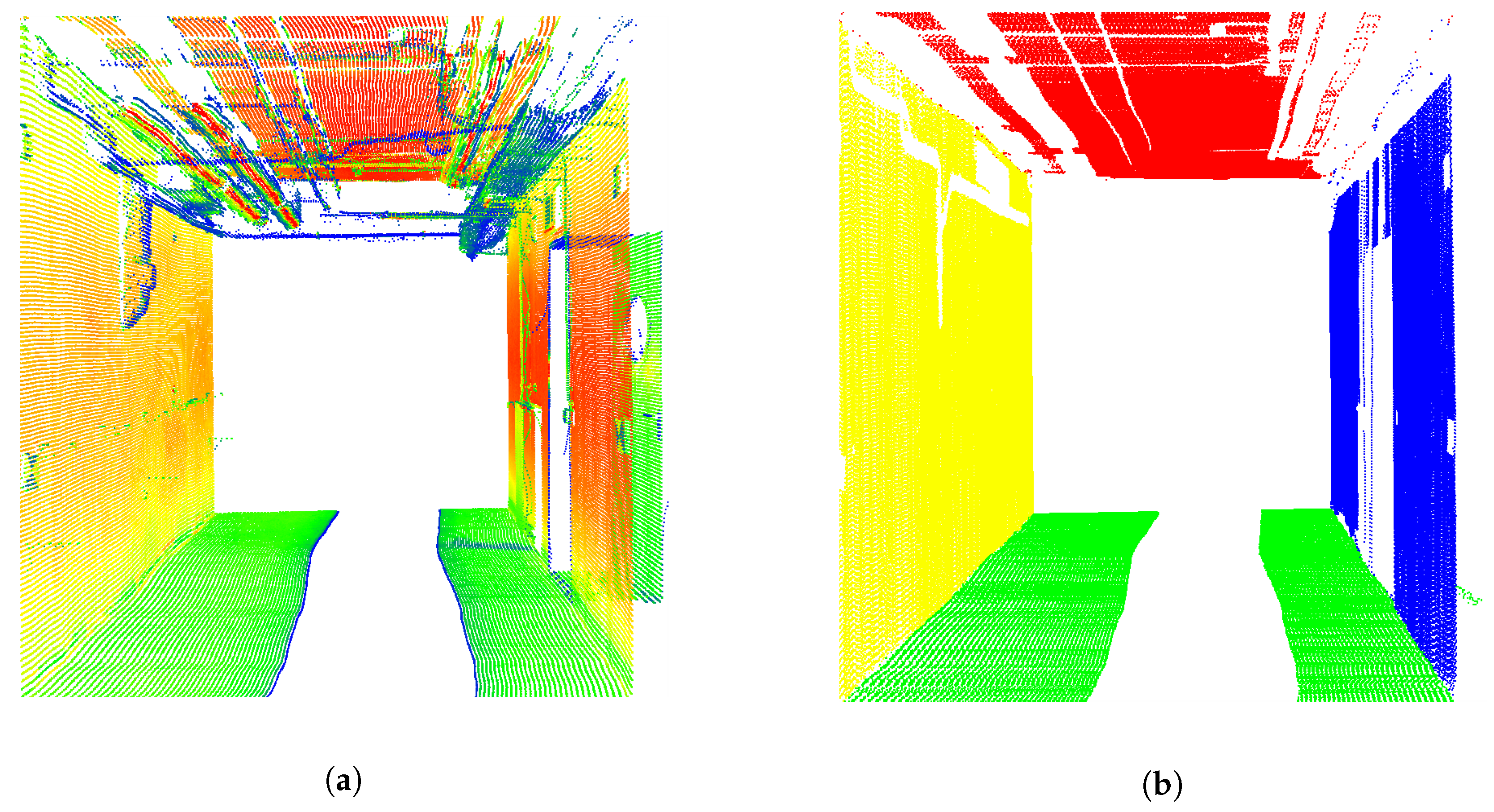
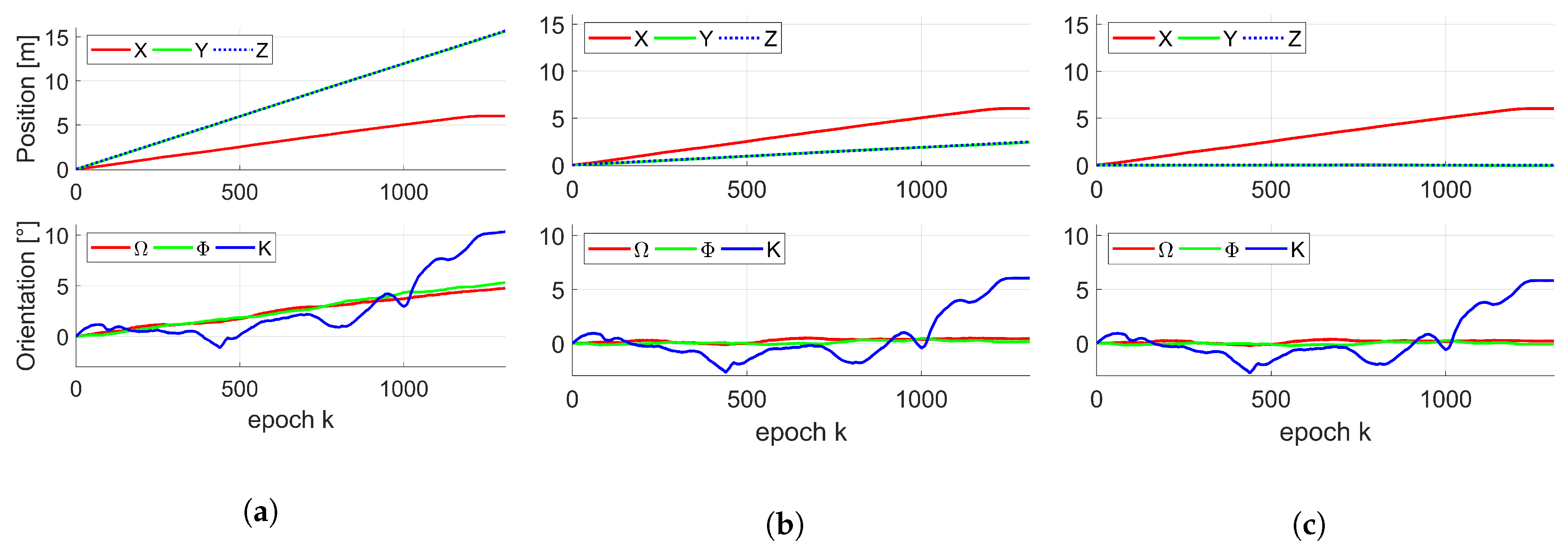
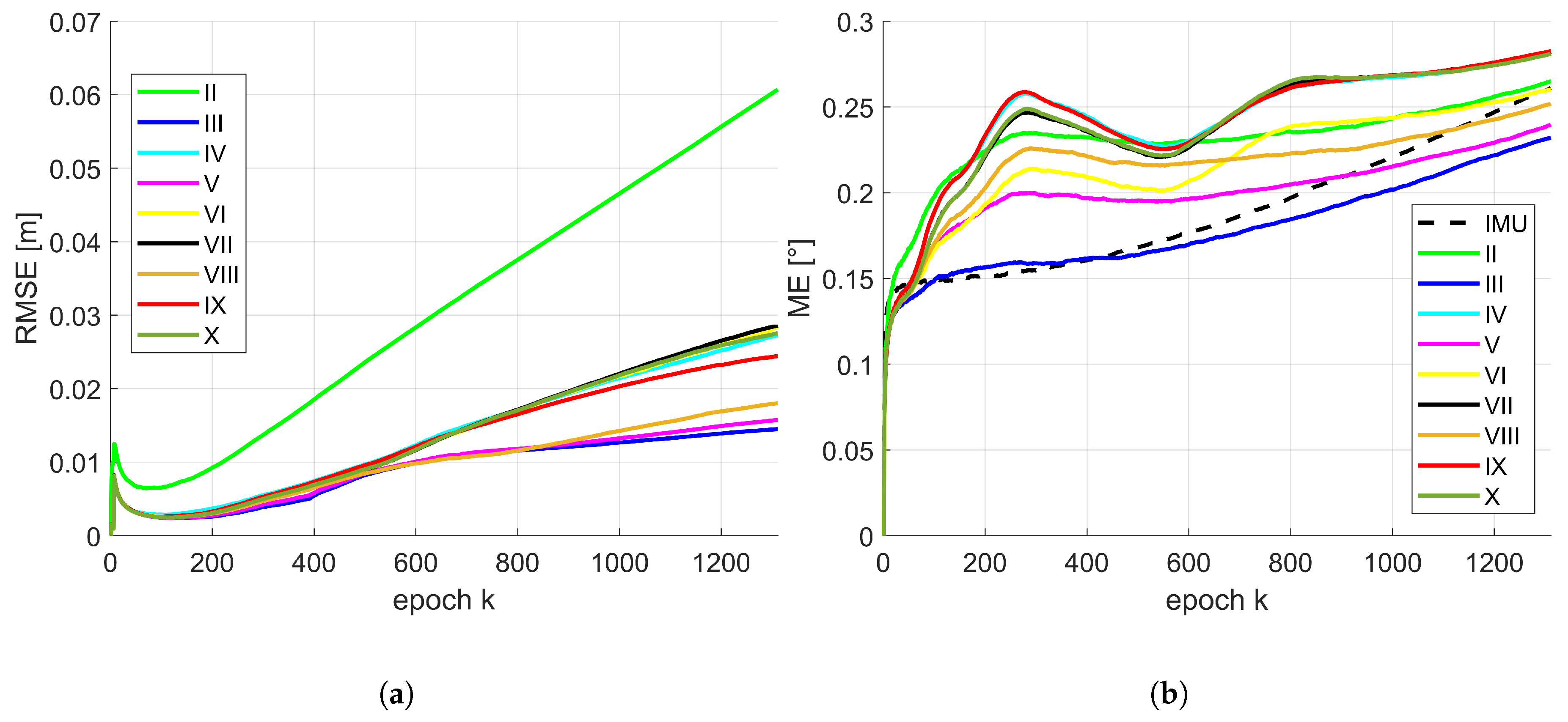
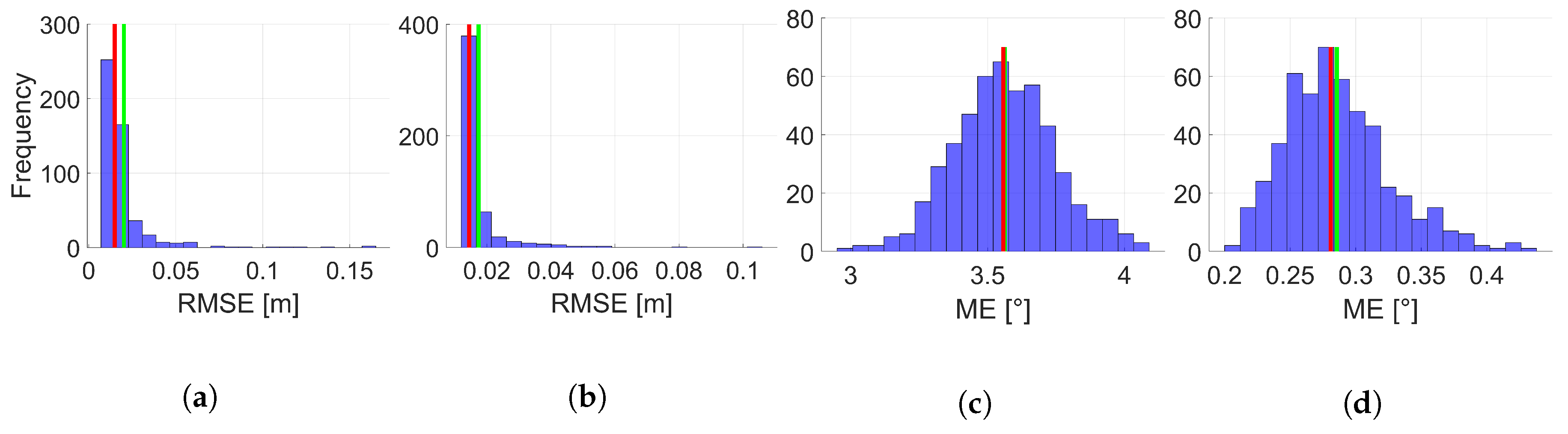
3.3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Vogel, S.; Alkhatib, H.; Neumann, I. Accurate Indoor Georeferencing with Kinematic Multi Sensor Systems. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares (Madrid), Spain, 4–7 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Paffenholz, J.A. Direct Geo-Referencing of 3D Point Clouds with 3D Positioning Sensors. Ph.D. Thesis, Deutsche Geodätische Komission (DGK), München, Germany, 2012. [Google Scholar]
- Mautz, R. The challenges of indoor environments and specification on some alternative positioning systems. In Proceedings of the 6th Workshop on Positioning, Navigation and Communication (WPNC), Hannover, Germany, 19 March 2009; pp. 29–36. [Google Scholar] [CrossRef]
- Keller, F.; Sternberg, H. Multi-Sensor Platform for Indoor Mobile Mapping: System Calibration and Using a Total Station for Indoor Applications. Remote Sens. 2013, 5, 5805–5824. [Google Scholar] [CrossRef] [Green Version]
- Jung, J.; Yoon, S.; Ju, S.; Heo, J. Development of Kinematic 3D Laser Scanning System for Indoor Mapping and As-Built BIM Using Constrained SLAM. Sensors 2015, 15, 26430–26456. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hartmann, J.; Paffenholz, J.A.; Strübing, T.; Neumann, I. Determination of Position and Orientation of LiDAR Sensors on Multisensor Platforms. J. Surv. Eng. 2017, 143, 1–11. [Google Scholar] [CrossRef]
- Abmayr, T.; Härtl, F.; Hirzinger, G.; Burschka, D.; Fröhlich, C. A correlation based target finder for terrestrial laser scanning. J. Appl. Geod. 2008, 2, 131–137. [Google Scholar] [CrossRef]
- Nguyen, V.; Harati, A.; Martinelli, A.; Siegwart, R.; Tomatis, N. Orthogonal SLAM: A Step toward Lightweight Indoor Autonomous Navigation. In Proceedings of the International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 5007–5012. [Google Scholar] [CrossRef]
- Lee, K.W.; Wijesoma, S.; Guzmán, J.I. A constrained SLAM approach to robust and accurate localisation of autonomous ground vehicles. Robot. Auton. Syst. 2007, 55, 527–540. [Google Scholar] [CrossRef]
- Jutzi, B.; Weinmann, M.; Meidow, J. Improved UAV-Borne 3D Mapping by Fusing Optical and Laserscanner Data. ISPRS Int. Arch. Photogr. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 223–228. [Google Scholar] [CrossRef]
- Kaul, L.; Zlot, R.; Bosse, M. Continuous-Time Three-Dimensional Mapping for Micro Aerial Vehicles with a Passively Actuated Rotating Laser Scanner. J. Field Robot. 2016, 33, 103–132. [Google Scholar] [CrossRef]
- Schön, S.; Brenner, C.; Alkhatib, H.; Coenen, M.; Dbouk, H.; Garcia-Fernandez, N.; Fischer, C.; Heipke, C.; Lohmann, K.; Neumann, I.; et al. Integrity and Collaboration in Dynamic Sensor Networks. Sensors 2018, 18, 21. [Google Scholar] [CrossRef] [PubMed]
- Dang, T. Kontinuierliche Selbstkalibrierung von Stereokameras: Dissertation; Schriftenreih/Institut für Messund Regelungstechnik, KIT, Univ.-Verl. Karlsruhe: Karlsruhe, Germany, 2007; Volume 8. [Google Scholar]
- Steffen, R.; Beder, C. Recursive Estimation with Implicit Constraints. In Pattern recognition; Lecture Notes in Computer Science; Hamprecht, F.A., Schnörr, C., Jähne, B., Eds.; Springer: Berlin, Germany, 2007; Volume 4713, pp. 194–203. [Google Scholar]
- Dang, T. An Iterative Parameter Estimation Method for Observation Models with Nonlinear Constraints. Metrol. Meas. Syst. 2008, 15, 421–432. [Google Scholar]
- Vogel, S.; Alkhatib, H.; Neumann, I. Iterated Extended Kalman Filter with Implicit Measurement Equation and Nonlinear Constraints for Information-Based Georeferencing. In Proceedings of the 21st International Conference on Information Fusion (FUSION), IEEE, Cambridge, UK, 10–13 July 2018; pp. 1209–1216. [Google Scholar] [CrossRef]
- Ettlinger, A.; Neuner, H.; Burgess, T. Development of a Kalman Filter in the Gauss-Helmert Model for Reliability Analysis in Orientation Determination with Smartphone Sensors. Sensors 2018, 18, 414. [Google Scholar] [CrossRef] [PubMed]
- Simon, D. Optimal State Estimation; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Simon, D. Kalman filtering with state constraints: A survey of linear and nonlinear algorithms. IET Control Theory Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef]
- Simon, D.; Simon, D.L. Constrained Kalman filtering via density function truncation for turbofan engine health estimation. Int. J. Syst. Sci. 2010, 41, 159–171. [Google Scholar] [CrossRef] [Green Version]
- Hartmann, J.; Trusheim, P.; Alkhatib, H.; Paffenholz, J.A.; Diener, D.; Neumann, I. High Accurate Pointwise (Geo-)Referencing of a k-TLS based Multi-Sensor-System. ISPRS Ann. Photogr. Remote Sens. Spat. Inf. Sci. 2018, IV-4, 81–88. [Google Scholar] [CrossRef]
- Zoller + Fröhlich GmbH. Z + F Imager 5016, 3D Laser Scanner–Data Sheet. Available online: https://www.zf-laser.com/Z-F-IMAGER-R-5016.184.0.html (accessed on 12 October 2018).
- Hexagone Metrology. Leica Absolute Tracker AT960 (Product Brochure): Absolute Portability. Absolute Speed. Absolute Accuracy. Available online: https://w3.leica-geosystems.com/downloads123/m1/metrology/general/brochures/leica%20at960\%20brochure_en.pdf (accessed on 12 October 2018).
- Roumeliotis, S.I.; Sukhatme, G.S.; Bekey, G.A. Circumventing dynamic modeling: evaluation of the error-state Kalman filter applied to mobile robot localization. In Proceedings of the IEEE International Conference on Robotics and Automation, Piscataway, NJ, USA, 1999; pp. 1656–1663. [Google Scholar] [CrossRef]
- Madyastha, V.; Ravindra, V.; Mallikarjunan, S.; Goyal, A. Extended Kalman Filter vs. Error State Kalman Filter for Aircraft Attitude Estimation. In AIAA Guidance, Navigation, and Control Conference; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2011. [Google Scholar] [CrossRef]
- Boada, B.L.; Garcia-Pozuelo, D.; Boada, M.J.L.; Diaz, V. A Constrained Dual Kalman Filter Based on pdf Truncation for Estimation of Vehicle Parameters and Road Bank Angle: Analysis and Experimental Validation. IEEE Trans. Intell. Trans. Syst. 2017, 18, 1006–1016. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory, Algorithms and Software; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Deutsches Institut für Normung e.V. Toleranzen im Hochbau - Bauwerke (DIN 18202), 05.2015. Available online: https://bvn.de/Mitgliederservice/Infoline/Downloads/Technik/Toleranzen_im_Hochbau_2015.pdf (accessed on 12 October 2018).
- Roese-Koerner, L.R. Convex Optimization for Inequality Constrained Adjustment Problems. Ph.D. Thesis, Deutsche Geodätische Komission (DGK), München, Germany, 2015. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Observation | Assumed | |
|---|---|---|---|
| Moderate IMU | Accurate IMU | ||
| Laser scanner | 3 mm | 3 mm | |
| IMU | X | 0.01 mm | 0.01 mm |
| 80 mm | 20 mm | ||
| 0.2 | 0.07 | ||
| State Parameter | |
|---|---|
| 0.1 m | |
| 0.1 m/s | |
| 0.1 m |
| Combinations of Respective Equality and Inequality State Constraints | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| I | II | III | IV | V | VI | VII | VIII | IX | X | |
| unit vector for left wall | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| unit vector for right wall | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| unit vector for ceiling | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| unit vector for floor | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| left/right wall are parallel | ✓ | ✓ | ✓ | ✓ | ||||||
| ceiling/floor are parallel | ✓ | ✓ | ✓ | ✓ | ||||||
| left wall/ceiling are perpendicular | ✓ | ✓ | ✓ | ✓ | ||||||
| right wall/floor are perpendicular | ✓ | ✓ | ||||||||
| Combinations of Respective Equality and Inequality State Constraints | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| IMU | I | II | III | IV | V | VI | VII | VIII | IX | X | |
| Min [m] | 12.646 1.9833 | 1.4684 0.8992 | 0.0118 0.0114 | 0.0128 0.0140 | 0.0147 0.0168 | 0.0130 0.0142 | 0.0135 0.0143 | 0.0161 0.0209 | 0.0130 0.0142 | 0.0168 0.0159 | 0.0164 0.0209 |
| Max [m] | 13.030 2.0864 | 3469.2 2.4 | 5.7065 4.3490 | 0.1649 0.1049 | 0.2269 0.1425 | 0.1360 0.0561 | 0.2460 0.1122 | 0.1234 0.0966 | 0.2278 0.0781 | 0.4138 0.2269 | 141.08 0.0699 |
| Mean [m] | 12.835 2.0336 | 79.778 1974.7 | 0.3188 0.1828 | 0.0201 0.0174 | 0.0280 0.0312 | 0.0218 0.0182 | 0.0470 0.0327 | 0.0269 0.0304 | 0.0226 0.0206 | 0.0335 0.0282 | 0.3139 0.0291 |
| Median [m] | 12.832 2.0337 | 9.9179 8.8968 | 0.1118 0.0607 | 0.0149 0.0145 | 0.0214 0.0273 | 0.0162 0.0157 | 0.0455 0.0284 | 0.0236 0.0286 | 0.0172 0.0180 | 0.0232 0.0244 | 0.0263 0.0275 |
| SD [m] | 0.0678 0.0176 | 320.29 16083 | 0.6136 0.3384 | 0.0160 0.0080 | 0.0192 0.0130 | 0.0151 0.0064 | 0.0272 0.0167 | 0.0116 0.0081 | 0.0163 0.0075 | 0.0325 0.0147 | 6.3077 0.0063 |
| CI [m] | 12.714 1.9983 | 2.7926 2.0866 | 0.0189 0.0137 | 0.0134 0.0141 | 0.0163 0.0194 | 0.0133 0.0143 | 0.0140 0.0146 | 0.0171 0.0236 | 0.0135 0.0144 | 0.0179 0.0181 | 0.0178 0.0227 |
| CI [m] | 12.960 2.0707 | 559.22 7126.2 | 1.9255 0.9893 | 0.0596 0.0405 | 0.0742 0.0647 | 0.0729 0.0409 | 0.1042 0.0771 | 0.0563 0.0525 | 0.0654 0.0414 | 0.1155 0.0570 | 0.0947 0.0498 |
| Combinations of Respective Equality and Inequality State Constraints | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| IMU | I | II | III | IV | V | VI | VII | VIII | IX | X | |
| Min [°] | 3.6742 0.1548 | 4.6565 2.1602 | 2.9283 0.1522 | 2.9843 0.1541 | 2.9558 0.1986 | 3.0133 0.1557 | 2.9283 0.1498 | 2.9544 0.2151 | 2.9793 0.1535 | 2.9560 0.2084 | 2.9503 0.2100 |
| Max [°] | 4.8145 0.4367 | 42.297 32.819 | 4.3253 0.4542 | 4.1203 0.4114 | 4.0770 0.4455 | 4.0935 0.4197 | 4.0896 0.4218 | 4.0788 0.4434 | 4.0887 0.4279 | 4.0779 0.4460 | 4.0766 0.4369 |
| Mean [°] | 4.2414 0.2654 | 11.222 9.4379 | 3.6246 0.2727 | 3.6140 0.2371 | 3.5657 0.2864 | 3.5990 0.2447 | 3.5691 0.2628 | 3.5653 0.2860 | 3.5873 0.2562 | 3.5643 0.2857 | 3.5625 0.2856 |
| Median [°] | 4.2471 0.2611 | 10.355 8.8777 | 3.6242 0.2649 | 3.6117 0.2322 | 3.5619 0.2821 | 3.5992 0.2397 | 3.5689 0.2600 | 3.5619 0.2822 | 3.5874 0.2520 | 3.5615 0.2825 | 3.5568 0.2809 |
| SD [°] | 0.1890 0.0529 | 4.2427 4.1022 | 0.2302 0.0598 | 0.1807 0.0463 | 0.1863 0.0400 | 0.1814 0.0463 | 0.1893 0.0482 | 0.1871 0.0405 | 0.1838 0.0453 | 0.1866 0.0400 | 0.1874 0.0400 |
| CI [m] | 3.8684 0.1793 | 5.7887 3.9401 | 3.1598 0.1762 | 3.2611 0.1667 | 3.1979 0.2212 | 3.2463 0.1668 | 3.1921 0.1706 | 3.1992 0.2216 | 3.2241 0.1836 | 3.1982 0.2226 | 3.1970 0.2206 |
| CI [m] | 4.6200 0.3758 | 22.2408 19.2219 | 4.0898 0.4079 | 3.9940 0.3426 | 3.9578 0.3809 | 3.9841 0.3443 | 3.9604 0.3699 | 3.9565 0.3787 | 3.9702 0.3612 | 3.9562 0.3822 | 3.9542 0.3804 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vogel, S.; Alkhatib, H.; Bureick, J.; Moftizadeh, R.; Neumann, I. Georeferencing of Laser Scanner-Based Kinematic Multi-Sensor Systems in the Context of Iterated Extended Kalman Filters Using Geometrical Constraints. Sensors 2019, 19, 2280. https://doi.org/10.3390/s19102280
Vogel S, Alkhatib H, Bureick J, Moftizadeh R, Neumann I. Georeferencing of Laser Scanner-Based Kinematic Multi-Sensor Systems in the Context of Iterated Extended Kalman Filters Using Geometrical Constraints. Sensors. 2019; 19(10):2280. https://doi.org/10.3390/s19102280
Chicago/Turabian StyleVogel, Sören, Hamza Alkhatib, Johannes Bureick, Rozhin Moftizadeh, and Ingo Neumann. 2019. "Georeferencing of Laser Scanner-Based Kinematic Multi-Sensor Systems in the Context of Iterated Extended Kalman Filters Using Geometrical Constraints" Sensors 19, no. 10: 2280. https://doi.org/10.3390/s19102280
APA StyleVogel, S., Alkhatib, H., Bureick, J., Moftizadeh, R., & Neumann, I. (2019). Georeferencing of Laser Scanner-Based Kinematic Multi-Sensor Systems in the Context of Iterated Extended Kalman Filters Using Geometrical Constraints. Sensors, 19(10), 2280. https://doi.org/10.3390/s19102280