Geometric Aberration Theory of Offner Imaging Spectrometers


Abstract
:1. Introduction
2. Three-Concentric-Element (Offner) Optical System
3. Ray-Tracing Formulas
4. Analytic Expression of Spot Diagrams and Aberrations
5. Analysis of Focal Conditions and Aberrations
5.1. Focal Conditions
5.1.1. Meridional Focal Condition
5.1.2. Sagittal Focal Condition
5.2. Aberration Analysis
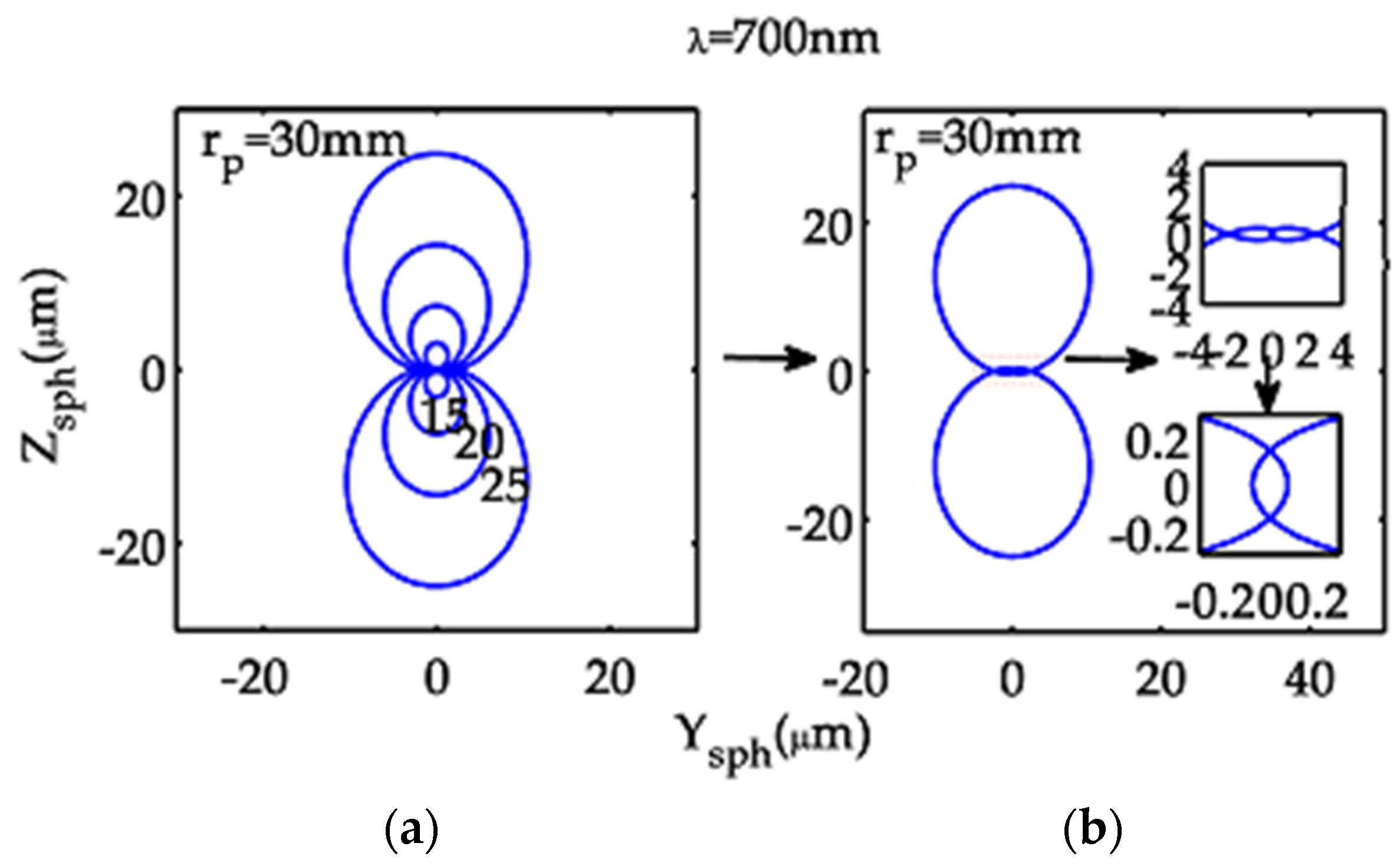
5.2.1. Spherical Aberration
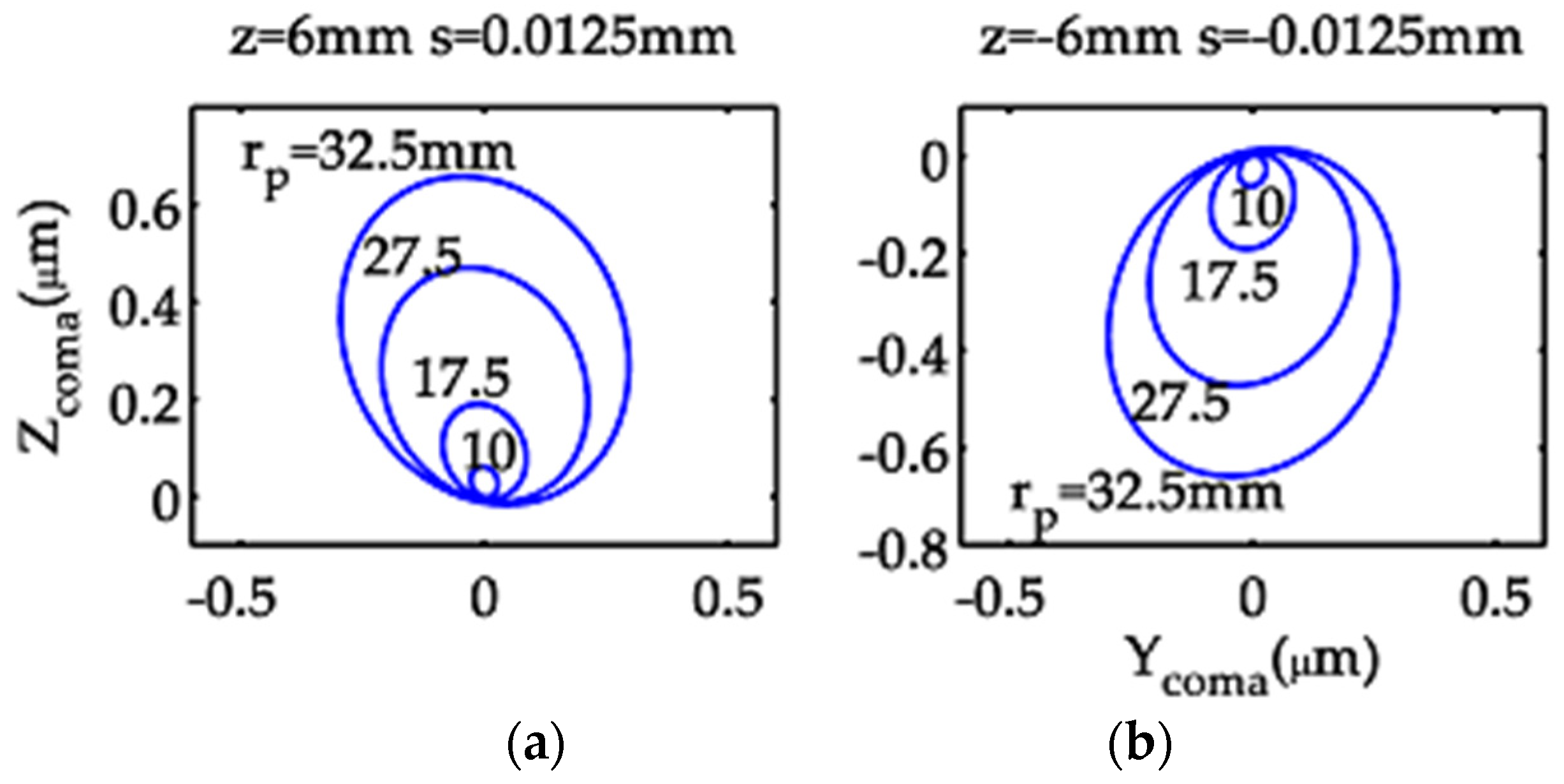
5.2.2. Coma
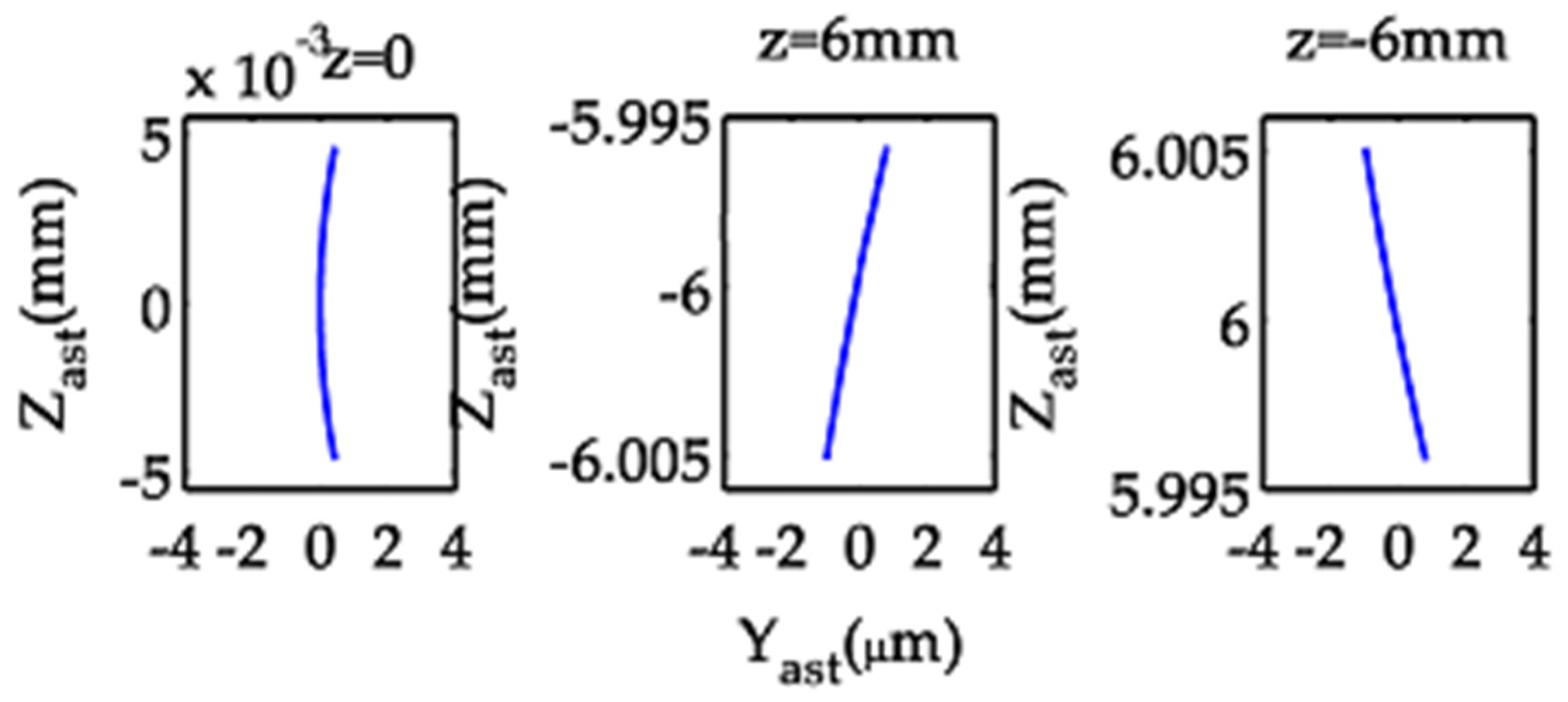
5.2.3. Astigmatism
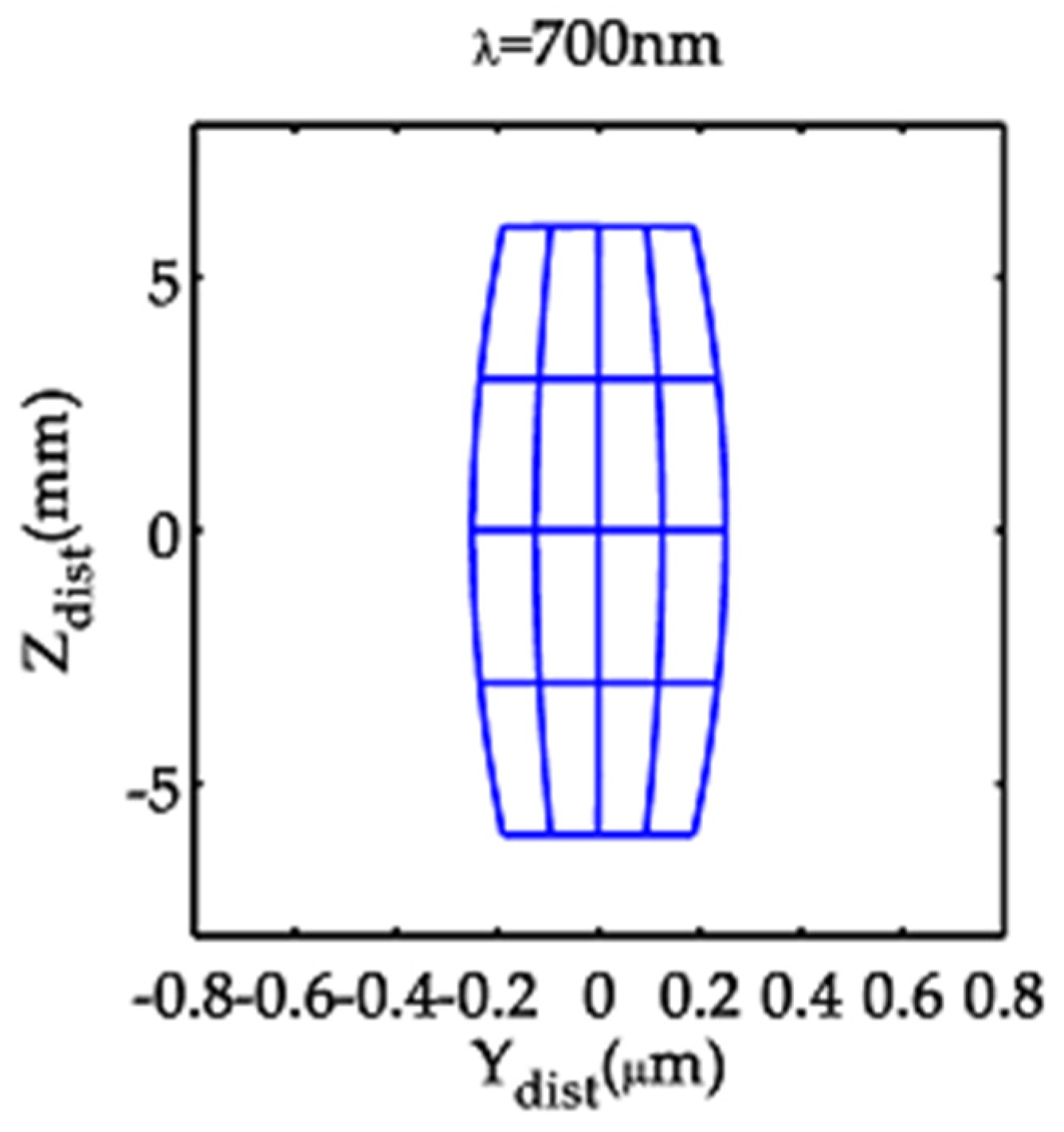
5.2.4. Distortion
6. Analysis of Diagram and Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Aberration Coefficients Chijk and Dhijk
Appendix B. Aberration Coefficients Ehijk and Fhijk
References
- Huang, H.; Li, X.T.; Cen, Z.F. Optical system design for a shortwave infrared imaging spectrometer. In Optical Design and Testing V; Society of Photo-Optical Instrumentation Engineers: Bellingham, WA, USA, 2012; Volume 85570R, pp. 1–10. [Google Scholar]
- Jacob, R.; Aaron, B.; Kevin, P.T.; Jannick, P.R. Freeform spectrometer enabling increased compactness. Light Sci. Appl. 2017, 6, 10. [Google Scholar]
- Liu, C.; Christoph, S.; Thomas, F.P.; Uwe, D.Z.; Herbert, G. Optical Design and Tolerancing of a Hyperspectral Imaging Spectrometer; Society of Photo-Optical Instrumentation Engineers: Bellingham, WA, USA, 2016; Volume 9947, pp. 1–10. [Google Scholar]
- Pang, Y.J.; Zhang, Y.X.; Yang, H.D.; Liu, Z.Y.; Huang, Z.H.; Jin, G.F. Compact high-resolution spectrometer using two plane gratings with triple dispersion. Opt. Express 2018, 26, 6382–6391. [Google Scholar] [CrossRef] [PubMed]
- Prieto-Blanco, X.; Montero-Orille, C.; Couce, B.; de la Fuente, R. Analytical design of an Offner imaging spectrometer. Opt. Express 2006, 20, 9156–9168. [Google Scholar] [CrossRef] [PubMed]
- Tang, T.J.; Zhang, Z.; Wang, B.H. Design of visible/infrared double-band spectral imager. J. Phys. Conf. Ser. 2016, 680, 1–6. [Google Scholar]
- Zhang, D.; Zheng, Y.Z. Hyperspectral Imaging System for UAV; Society of Photo-Optical Instrumentation Engineers: Bellingham, WA, USA, 2015; Volume 96780R, pp. 1–6. [Google Scholar]
- Kwo, D.; Lawrence, G.; Chrisp, M. Design of a Grating Spectrometer from a 1:1 Offner Mirror System; Society of Photo-Optical Instrumentation Engineers: Bellingham, WA, USA, 1987; Volume 818, pp. 275–279. [Google Scholar]
- Mouroulis, P. Low-distortion imaging spectrometer designs utilizing convex gratings. In Proceedings of the International Optical Design Conference, International Optical Design Conference, Kona, HI, USA, 8–12 June 1998; Volume 3482, pp. 594–601. [Google Scholar]
- Huang, Y.S.; Pei, Z.R.; Hong, R.J.; Li, B.C.; Zhang, D.W.; Xu, B.L.; Ni, Z.J.; Zhuang, S.L. Non-approximate method for designing Offner spectrometers. Optik 2014, 125, 4578–4582. [Google Scholar] [CrossRef]
- Seo, H.K.; Hong, J.K.; Soo, C. Aberration analysis of a concentric imaging spectrometer with a convex grating. Opt. Commun. 2014, 330, 6–10. [Google Scholar]
- Chrisp, M.P. Convex Diffraction Grating Imaging Spectrometer. Available online: http://www.freep-atentsonline.com/5880834.html (accessed on 12 October 2018).
- Xiang, L.Q.; Mikes, T. Corrected Concentric Spectrometer. Available online: http://www.freepate-ntsonline.com/6266140.html (accessed on 18 April 2018).
- Robert, L.L. Out-of-plane dispersion in an Offner spectrometer. Opt. Eng. 2007, 073004, 4. [Google Scholar]
- Prieto-Blanco, X.; Montero-Orille, C.; González-Núñez, H.; Mouriz, M.D.; Lago, E.L.; de la Fuente, R. Imaging with classical spherical diffraction gratings: The quadrature configuration. Opt. Soc. Am. A 2009, 11, 2400–2409. [Google Scholar] [CrossRef] [PubMed]
- Prieto-Blanco, X.; Montero-Orille, C.; González-Núñez, H.; Mouriz, M.D.; Lago, E.L.; de la Fuente, R. The Offner imaging spectrometer in quadrature. Opt. Express 2010, 12, 12756–12769. [Google Scholar] [CrossRef] [PubMed]
- Prieto-Blanco, X.; González-Núñez, H.; de la Fuente, R. Off-plane anastigmatic imaging in Offner spectrometers. Opt. Soc. Am. A 2011, 11, 2332–2339. [Google Scholar] [CrossRef] [PubMed]
- Prieto-Blanco, X.; de la Fuente, R. Compact Offner–Wynne imaging spectrometers. Opt. Commun. 2014, 328, 143–150. [Google Scholar] [CrossRef]
- Zhao, M.H.; Li, W.H.; Bayanheshig; Lv, Q. Aberration correction technique of Offner imaging spectrometer. Opt. Precis. Eng. 2017, 25, 3001–3011. [Google Scholar] [CrossRef]
- Zhao, X.L.; Bayanheshig; Li, W.H.; Jiang, Y.X.; Yang, S. Integrated design to complement aberrations of spherical focusing mirrors and concave holographic gratings in spectrometers. Acta Opt. Sin. 2016, 36, 10. [Google Scholar]
- Noda, H.; Namioka, T.; Seya, M. Ray tracing through holographic gratings. Opt. Soc. Am. 1974, 64, 1037–1042. [Google Scholar] [CrossRef]
- Namioka, T. Analytical representation of spot diagrams and its application to the design of monochromators. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 1992, 319, 219–227. [Google Scholar] [CrossRef]
- Namioka, T.; Koike, M.; Content, D. Geometric theory of the ellipsoidal grating. Appl. Opt. 1999, 33, 7261–7274. [Google Scholar] [CrossRef] [PubMed]
- Masui, S.; Namioka, T. Geometric aberration theory of double-element optical systems. Opt. Soc. Am. A 1999, 16, 2253–2268. [Google Scholar] [CrossRef]
- Namioka, T.; Koike, M.; Masui, S. Geometric theory for the design of multielement Optical system. Opt. Precis. Eng. 2001, 9, 458–466. [Google Scholar]
- Namioka, T. Aspheric wave-front recording optics for holographic gratings. Appl. Opt. 1995, 34, 2180–2186. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Spectral range/nm | 380–900 |
| Radius of M1/mm | 220 |
| Radius of G/mm | 112.2 |
| Radius of M2/mm | 216.85 |
| Dimension of slit/mm2 | 0.025 × 12 |
| Aperture of M1/mm2 | 65 × 65 |
| Aperture of G/mm2 | 30 × 30 |
| Constant of G/mm−1 | 0.01 |
| Diffraction order of G | −1 |
| ∠O1OO2 | 50.66° |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, M.; Jiang, Y.; Yang, S.; Li, W. Geometric Aberration Theory of Offner Imaging Spectrometers. Sensors 2019, 19, 4046. https://doi.org/10.3390/s19184046
Zhao M, Jiang Y, Yang S, Li W. Geometric Aberration Theory of Offner Imaging Spectrometers. Sensors. 2019; 19(18):4046. https://doi.org/10.3390/s19184046
Chicago/Turabian StyleZhao, Meihong, Yanxiu Jiang, Shuo Yang, and Wenhao Li. 2019. "Geometric Aberration Theory of Offner Imaging Spectrometers" Sensors 19, no. 18: 4046. https://doi.org/10.3390/s19184046
APA StyleZhao, M., Jiang, Y., Yang, S., & Li, W. (2019). Geometric Aberration Theory of Offner Imaging Spectrometers. Sensors, 19(18), 4046. https://doi.org/10.3390/s19184046