Local Parallel Cross Pattern: A Color Texture Descriptor for Image Retrieval


Abstract
:1. Introduction
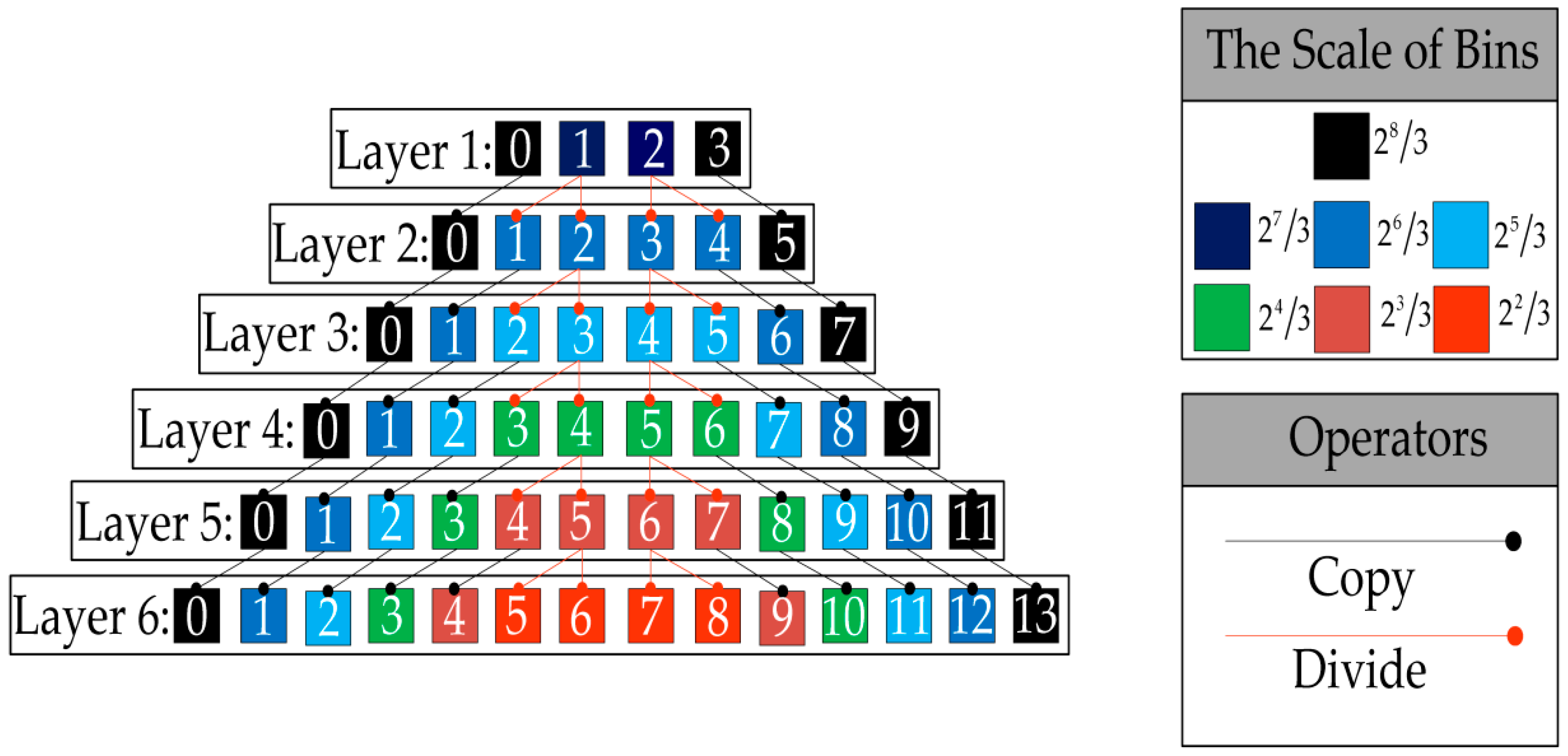
- We design a six-layer color quantizer that is applied to quantize the a* and b* components for color map extraction.
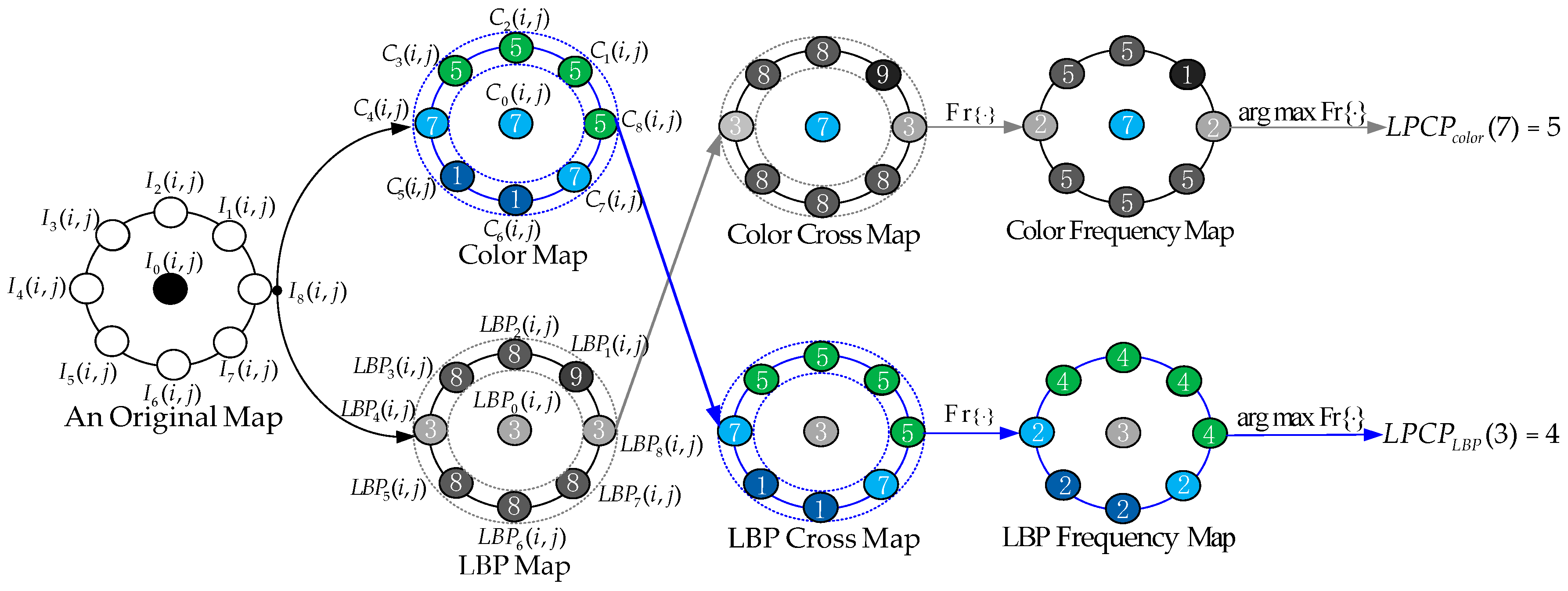
- We construct a local parallel cross pattern (LPCP) in which the LBP map and the color map are integrated into a whole framework.
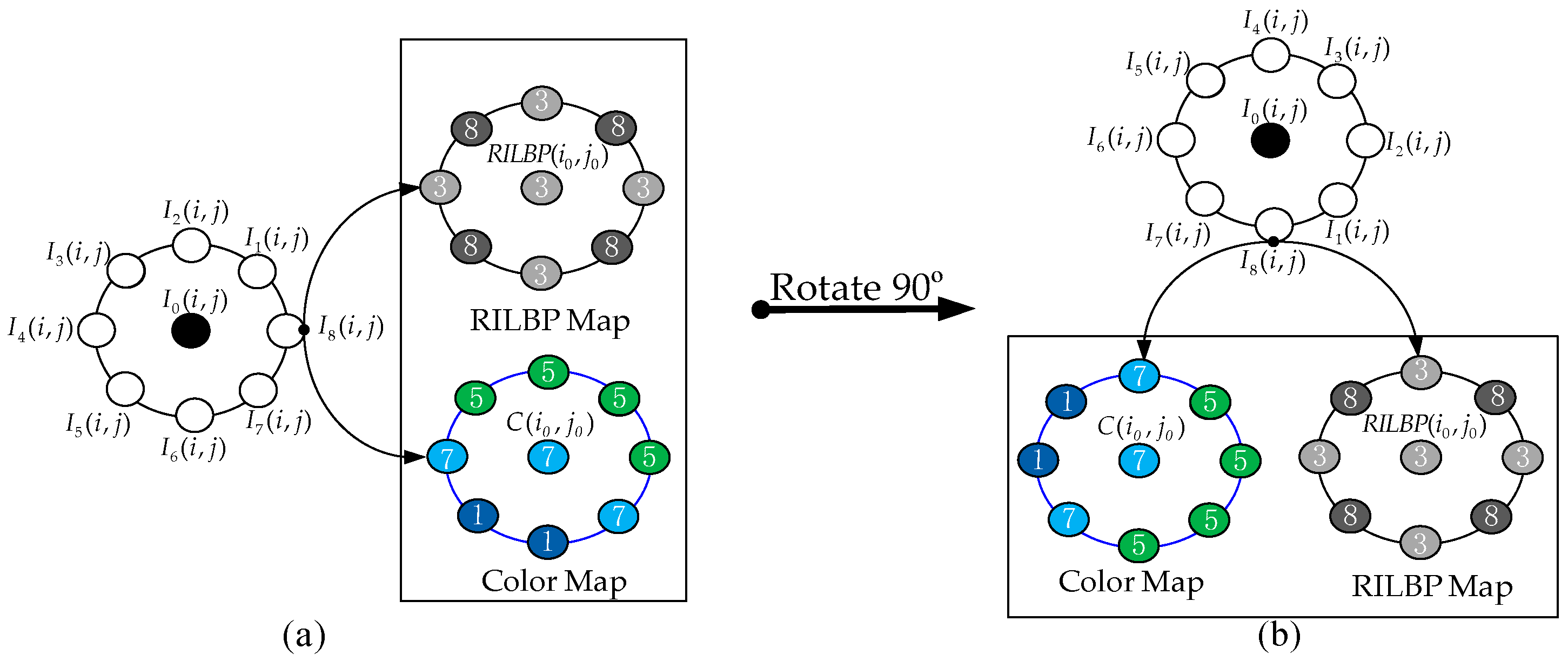
- We further extend the LPCP to the uniform local parallel cross pattern (ULPCP) and the rotation-invariant local parallel cross pattern (RILPCP) to reduce the computational complexity and achieve robustness to image rotation.
- We benchmark the comparative experiments with eight state-of-the-art color texture descriptors on eight benchmark datasets to illustrate the effectiveness, efficiency, robustness, and computational complexity of the proposed descriptors.
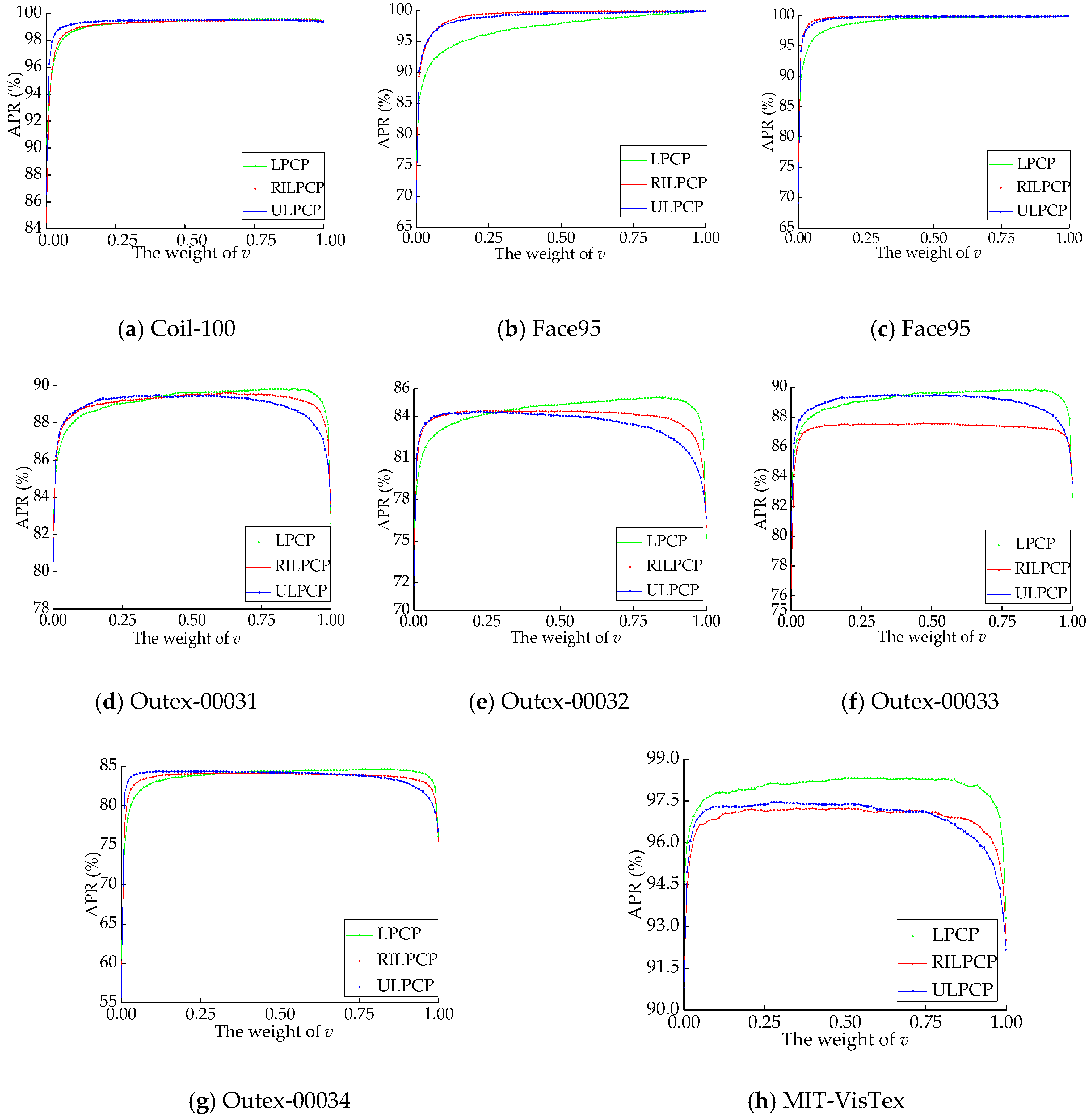
- We additionally develop a weight-based optimization scheme that shows better improvement.
2. Related Work
2.1. Local Binary Pattern
2.2. The Selection of the Color Space
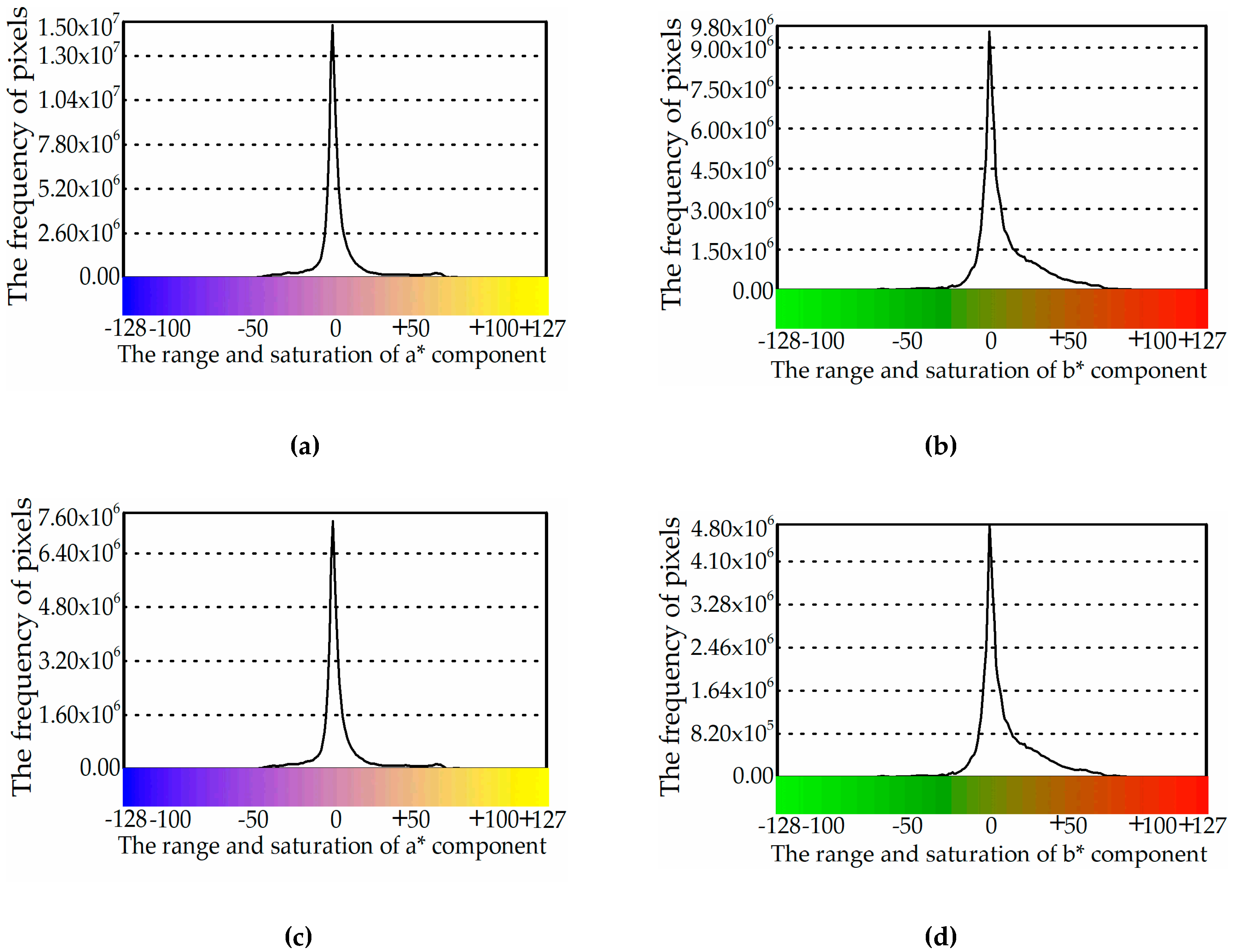
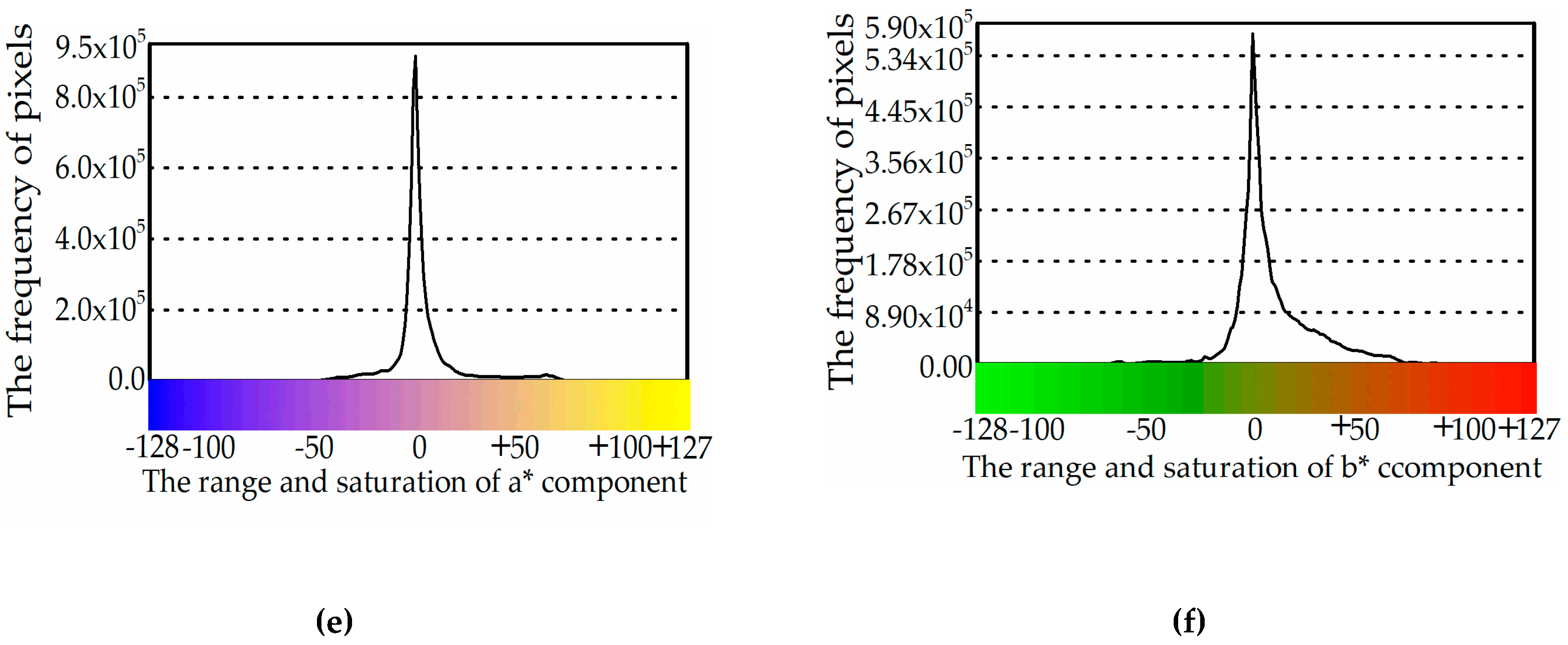
2.3. Color Distribution Prior Knowledge in the L*a*b* Color Space
3. Feature Representation
3.1. Six-Layer Color Quantizer
3.2. Local Parallel Cross Pattern
4. Experiments and Discussion
4.1. Distance Metric
4.2. Evaluation Criteria
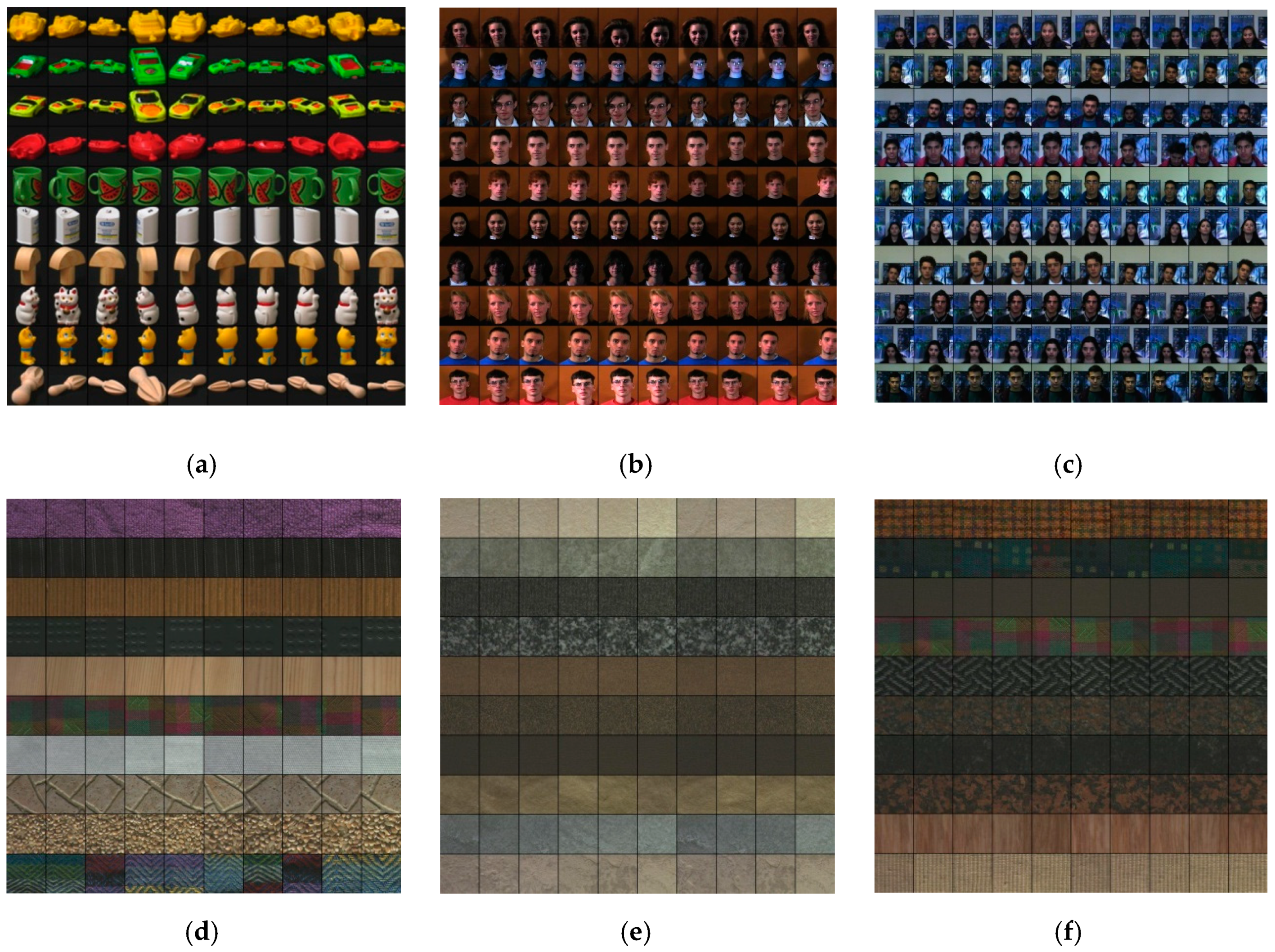
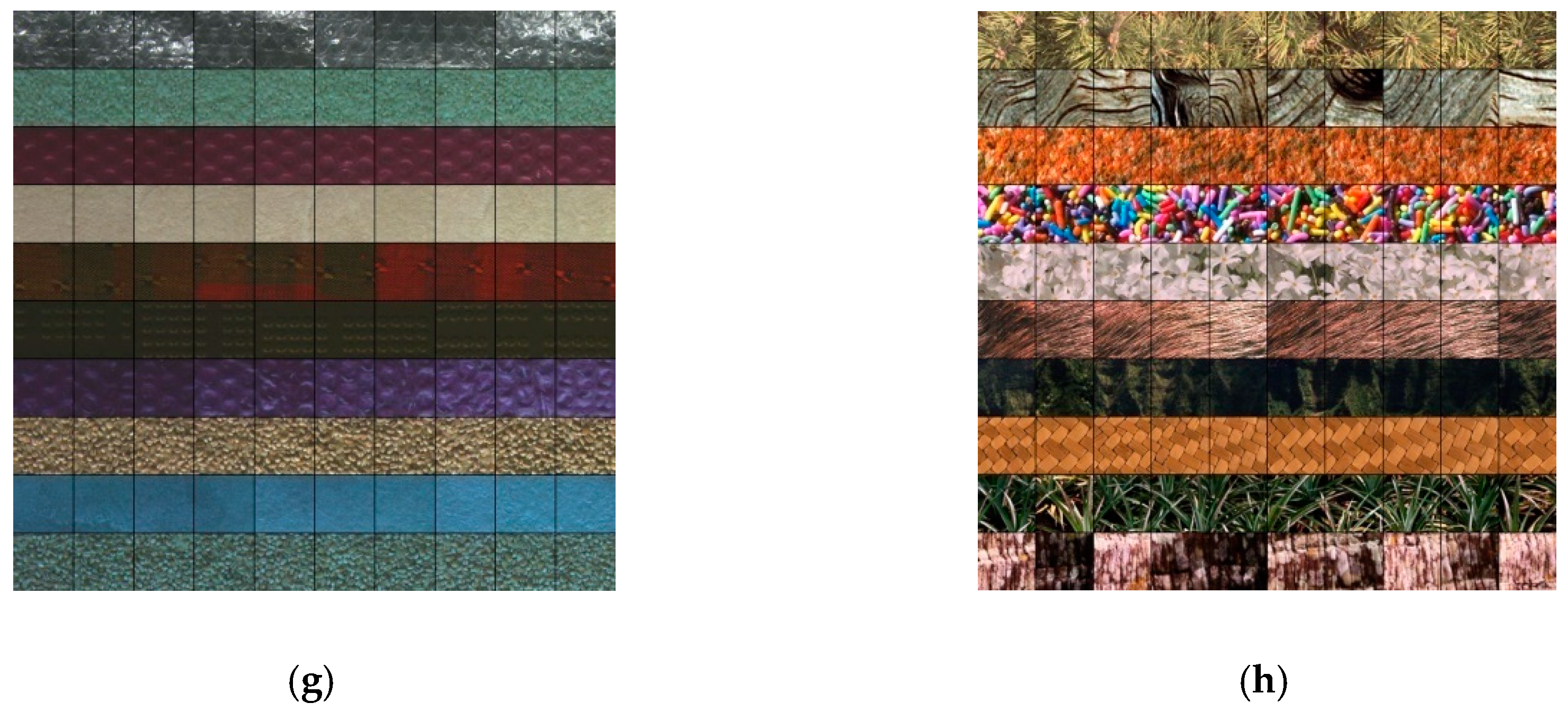
4.3. Image Databases
4.4. Evaluation of Color Quantization Layers
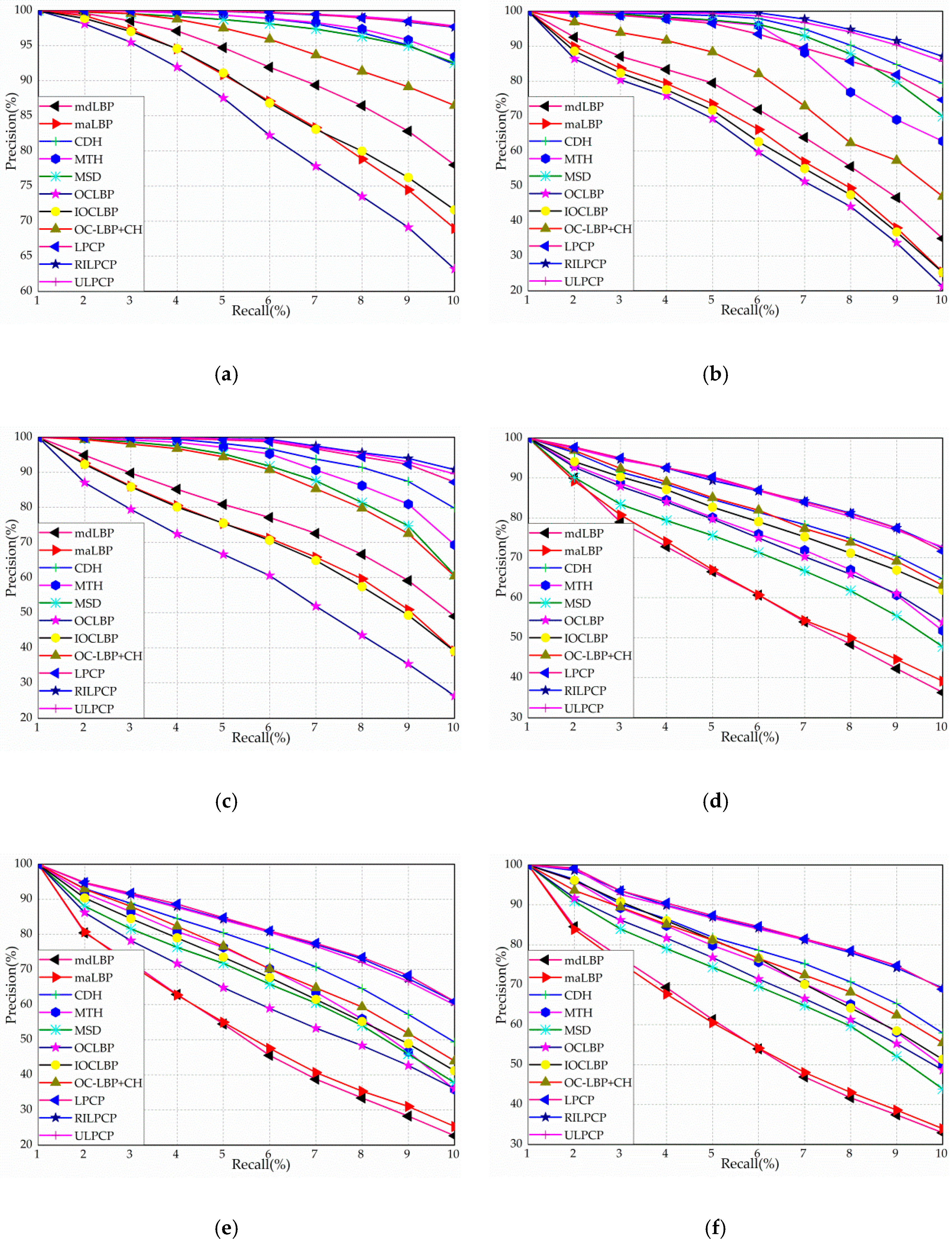
4.5. Comparison with LBP-Based Descriptors
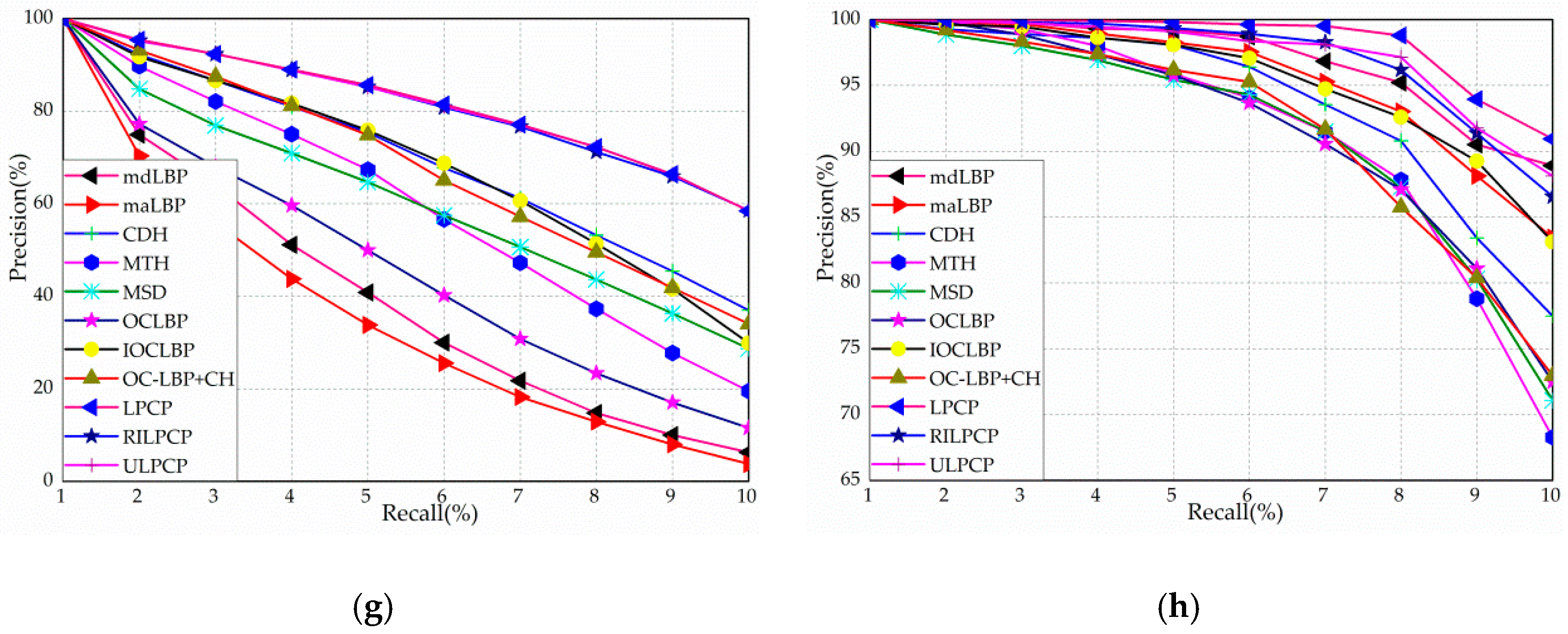
4.6. Comparison with Other Color Texture Descriptors
- Multi-channel adder local binary patterns (mdLBP) [18]: The 2048-dimensional color texture descriptor in the RGB color space.
- Multi-channel decoded local binary patterns (maLBP) [18]: The 1024-dimensional color texture descriptor in the RGB color space.
- Color difference histogram (CDH) [21]: The 90-dimensional color histogram and the 18-dimensional edge orientation histogram in the L*a*b* color space.
- Multi-texton histogram (MTH) [22]: The 64-dimensional color histogram and the 18-dimensional edge orientation histogram in the HSV color space.
- Micro-structure descriptor (MSD) [23]: The 72-dimensional color histogram and the 6-dimensional edge orientation histogram in the HSV color space.
- Opponent color local binary patterns (OCLBP) [24]: The 1536-dimensional color texture descriptor in the RGB color space.
- Improved opponent color local binary patterns (IOCLBP) [25]: The 3072-dimensional color-texture descriptor in the RGB color space.
- Orthogonal combination of local binary patterns and color histogram (OC-LBP + CH): The 12-dimensional color histogram in the L*a*b* color space and the 96-dimensional LBP variation in the gray-scale space [28].
- Local parallel cross pattern (LPCP).
- Rotation-invariant local parallel cross pattern (RILPCP).
- Uniform local parallel cross pattern (ULPCP).
- The added computational complexity is effective because the retrieval accuracy is enhanced by a large margin.
- The proposed descriptors can adaptively code the color and texture information from different image databases.
- The practicability and feasibility of the proposed descriptors, with acceptable feature vector length and competitive memory consumption, are well shown for a realistic system configuration.
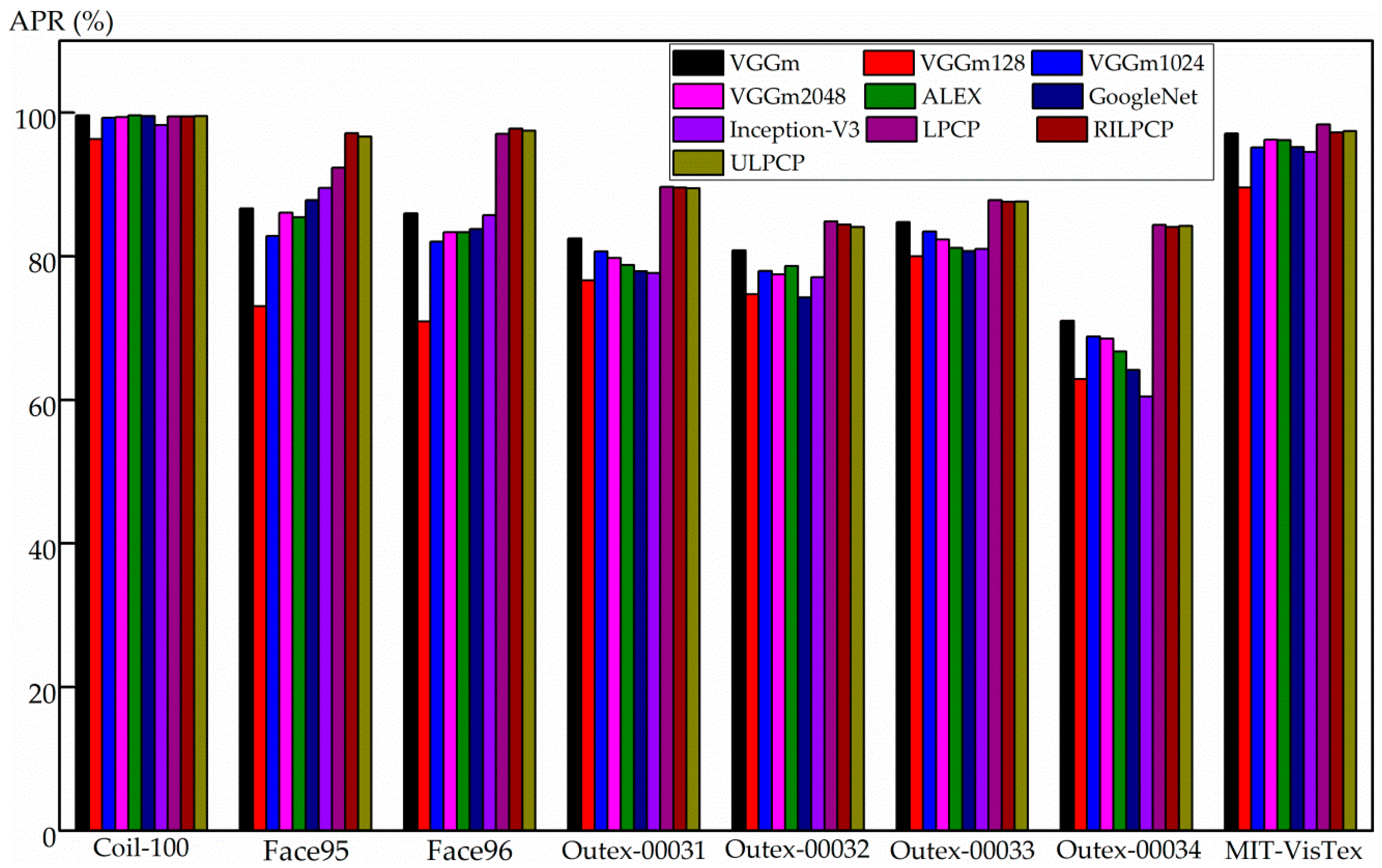
4.7. Comparison with CNN-Based Descriptors
- The CNN-based descriptors must be pretrained on a large-scale and annotated dataset (e.g., ImageNet), while the proposed LPCP, RILPCP, and ULPCP methods do not need any pretraining process.
- The pretrained CNN-based descriptors are computationally expensive (e.g., cloud servers and mainframe computers), but LPCP, RILPCP, and ULPCP can be performed on almost all realistic systems (e.g., personal smartphones and home security cameras).
- LPCP, RILPCP, and ULPCP are more effective than the CNN-based descriptors on six datasets out of the eight examined.
4.8. Additional Experiments on a Weight-Based Optimization Scheme
5. Conclusions
Supplementary Materials
Supplementary File 1Author Contributions
Funding
Conflicts of Interest
References
- Feng, Q.; Hao, Q.; Chen, Y.; Yi, Y.; Wei, Y.; Dai, J. Hybrid histogram descriptor: A fusion feature representation for image retrieval. Sensors 2018, 187, 1943. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.; Song, W.; Mei, H. Efficient retrieval of massive ocean remote sensing images via a cloud-based mean-shift algorithm. Sensors 2017, 17, 1693. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Wu, J.; Feng, L.; Qiao, H.; Liu, Y.; Lou, W.; Wang, W. Perceptual uniform descriptor and ranking on manifold for image retrieval. Inf. Sci. 2017, 424, 235–249. [Google Scholar] [CrossRef]
- Smeulders, A.W.M.; Worring, M.; Santini, S.; Gupta, A.; Jain, R. Content-based image retrieval at the end of the early years. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 22, 1349–1380. [Google Scholar] [CrossRef]
- Piras, L.; Giacinto, G. Information fusion in content based image retrieval: A comprehensive overview. Inf. Fusion 2017, 37, 50–60. [Google Scholar] [CrossRef]
- Liu, L.; Chen, J.; Fieguth, P.; Zhao, G.; Chellappa, R.; Pietikäinen, M. From BoW to CNN: Two decades of texture representation for texture classification. Int. J. Comput. Vis. 2018, 1–36. [Google Scholar] [CrossRef]
- Fernández, A.; Álvarez, M.X.; Bianconi, F. Texture description through histograms of equivalent patterns. J. Math. Imaging Vis. 2013, 45, 76–102. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikäinen, M.; Maenpaa, T. Multi resolution gray-scale and rotation invariant texture classification with local binary patterns. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 971–987. [Google Scholar] [CrossRef]
- Guo, Z.; Zhang, L.; Zhang, D. Rotation invariant texture classification using LBP variance (LBPV) with global matching. Pattern Recognit. 2010, 43, 706–719. [Google Scholar] [CrossRef]
- Guo, Z.; Zhang, L.; Zhang, D. A completed modeling of local binary pattern operator for texture classification. IEEE Trans. Image Process. 2010, 19, 1657–1663. [Google Scholar]
- Zhang, B.; Gao, Y.; Zhao, S.; Liu, J. Local derivative pattern versus local binary pattern: Face recognition with high-order local pattern descriptor. IEEE Trans. Image Process. 2010, 19, 533–544. [Google Scholar] [CrossRef] [PubMed]
- Tan, X.; Triggs, B. Enhanced local texture feature sets for face recognition under difficult lighting conditions. IEEE Trans. Image Process. 2010, 19, 1635–1650. [Google Scholar] [PubMed]
- Murala, S.; Maheshwari, R.P.; Balasubramanian, R. Local tetra patterns: A new feature descriptor for content-based image retrieval. IEEE Trans. Image Process. 2012, 21, 2874–2886. [Google Scholar] [CrossRef] [PubMed]
- Subrahmanyam, M.; Maheshwari, R.P.; Balasubramanian, R. Local maximum edge binary patterns: A new descriptor for image retrieval and object tracking. Signal Process. 2012, 92, 1467–1479. [Google Scholar] [CrossRef]
- Ren, J.; Jiang, X.; Yuan, J. Noise-resistant local binary pattern with an embedded error-correction mechanism. IEEE Trans. Image Process. 2013, 22, 4049–4060. [Google Scholar] [CrossRef] [PubMed]
- Verma, M.; Raman, B. Local neighborhood difference pattern: A new feature descriptor for natural and texture image retrieval. Multimed. Tools Appl. 2018, 77, 11843–11866. [Google Scholar] [CrossRef]
- Jeena Jacob, I.; Srinivasagan, K.G.; Jayapriya, K. Local oppugnant color texture pattern for image retrieval system. Pattern Recognit. Lett. 2014, 42, 72–78. [Google Scholar] [CrossRef]
- Dubey, S.R.; Singh, S.K.; Singh, R.K. Multichannel decoded local binary patterns for content-based image retrieval. IEEE Trans. Image Process. 2016, 25, 4018–4032. [Google Scholar] [CrossRef]
- Qi, X.; Xiao, R.; Li, C.; Qiao, Y.; Guo, J.; Tang, X. Pairwise rotation invariant co-occurrence local binary pattern. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 2199–2213. [Google Scholar] [CrossRef]
- Hao, Q.; Feng, Q.; Wei, Y.; Sbert, M.; Lu, W.; Xu, Q. Pairwise cross pattern: A color-LBP descriptor for content-based image retrieval. In Proceedings of the 19th Pacific Rim Conference on Multimedia, Hefei, China, 21–22 September 2018. [Google Scholar]
- Liu, G.; Yang, J. Content-based image retrieval using color difference histogram. Pattern Recognit. 2013, 46, 188–198. [Google Scholar] [CrossRef]
- Liu, G.; Li, Z.; Zhang, L.; Xu, Y. Image retrieval based on micro-structure descriptor. Pattern Recognit. 2011, 44, 2123–2133. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Zhang, L.; Hou, Y.; Li, Z.; Yang, J. Image retrieval based on multi-texton histogram. Pattern Recognit. 2010, 43, 2380–2389. [Google Scholar] [CrossRef]
- Mäenpää, T.; Pietikäinen, M. Texture analysis with local binary patterns. In Handbook of Pattern Recognition and Computer Vision; World Scientific: Singapore, 2005; pp. 197–216. [Google Scholar]
- Bianconi, F.; Bello-Cerezo, R.; Napoletano, P. Improved opponent color local binary patterns: An effective local image descriptor for color texture classification. J. Electron. Imag. 2017, 27. [Google Scholar] [CrossRef]
- Li, L.; Feng, L.; Yu, L.; Wu, J.; Liu, S. Fusion framework for color image retrieval based on bag-of-words model and color local Haar binary patterns. J. Electron. Imag. 2016, 25. [Google Scholar] [CrossRef]
- Cusano, C.; Napoletano, P.; Schettini, R. Evaluating color texture descriptors under large variations of controlled lighting conditions. J. Opt. Soc. Am. A 2016, 33, 17–30. [Google Scholar] [CrossRef]
- Singh, C.; Walia, E.; Kaur, K.P. Enhancing color image retrieval performance with feature fusion and non-linear support vector machine classifier. Optik 2018, 158, 127–141. [Google Scholar] [CrossRef]
- Pietikäinen, M.; Ojala, T.; Xu, Z. Rotation-invariant texture classification using feature distributions. Pattern Recognit. 2000, 33, 43–52. [Google Scholar] [CrossRef] [Green Version]
- Bianconi, F.; González, E. Counting local n-ary patterns. Pattern Recognit. Lett. 2018, 177, 24–29. [Google Scholar] [CrossRef]
- Sarrafzadeh, O.; Dehnavi, A.M. Nucleus and cytoplasm segmentation in microscopic images using k-means clustering and region growing. Adv. Biomed. Res. 2015, 4, 174. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Publishing House of Electronics Industry: Beijing, China, 2010; pp. 455–456. ISBN 9787121102073. [Google Scholar]
- Salzburg Texture Image Database. Available online: http://www.wavelab.at/sources/STex/ (accessed on 22 August 2014).
- Kolesnikov, A.; Trichina, E.; Kauranne, T. Estimating the number of clusters in a numerical data set via quantization error modeling. Pattern Recognit. 2015, 48, 941–952. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, K.; Feng, Q.; Wang, J.; Kong, J. A novel image retrieval method based on hybrid information descriptors. J. Vis. Commun. Image Represent. 2014, 25, 1574–1587. [Google Scholar] [CrossRef]
- Standring, S. Gray’s Anatomy: The Anatomical Basis of Clinical Practice, 41st ed.; Elsevier Limited: New York, NY, USA, 2016; pp. 686–708. ISBN 9780702068515. [Google Scholar]
- Guo, J.; Prasetyo, H.; Lee, H.; Yao, C. Image retrieval using indexed histogram of void-and-cluster block truncation coding. Signal Process. 2016, 123, 143–156. [Google Scholar] [CrossRef]
- Nene, S.A.; Nayar, S.K.; Murase, H. Columbia Object Image Library (COIL-100); Technical Report CUCS; Department of Computer Science, Columbia University: New York, NY, USA, 1996. [Google Scholar]
- Libor Spacek’s Facial Image Databases “Face 95 Image Database”. Available online: https://cswww.essex.ac.uk/mv/allfaces/faces95.html (accessed on 8 August 2014).
- Libor Spacek’s Facial Image Databases “Face 96 Image Database”. Available online: https://cswww.essex.ac.uk/mv/allfaces/faces96.html (accessed on 8 August 2014).
- Outex Texture Image Database. Available online: http://lagis-vi.univ-lille1.fr/datasets/outex.html (accessed on 5 October 2017).
- MIT Vision and Modeling Group. Available online: http://vismod.media.mit.edu/pub/ (accessed on 12 August 2014).
- Szegedy, C.; Vanhoucke, V.; Loffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Napoletano, P. Hand-crafted vs. learned descriptors for color texture classification. In Proceedings of the International Workshop on Computational Color Imaging, Milan, Italy, 29–31 March 2017. [Google Scholar]
- Zou, Q.; Ni, L.; Zhang, T.; Wang, Q. Deep learning based feature selection for remote sensing scene classification. IEEE Trans. Geosci. Remote Sens. Lett. 2015, 12, 2321–2325. [Google Scholar] [CrossRef]
- Indyk, P.; Motwani, R. Approximate nearest neighbors: Towards removing the curse of dimensionality. In Proceedings of the IEEE Conference on Multimedia Information Analysis and Retrieval, Dallas, TX, USA, 24–26 May 1998; pp. 604–613. [Google Scholar]
- Yi, Y.; Zhou, W.; Liu, Q.; Luo, G.; Wang, J.; Fang, Y.; Zheng, C. Ordinal preserving matrix factorization for unsupervised feature selection. Signal Process. Image Commun. 2018, 67, 118–131. [Google Scholar] [CrossRef]
- Yi, Y.; Chen, Y.; Dai, J.; Gui, X.; Chen, X.; Lei, G.; Wang, W. Semi-supervised ridge regression with adaptive graph-based label propagation. Appl. Sci. 2018, 12, 2636. [Google Scholar] [CrossRef]
- Yi, Y.; Qiao, S.; Zhou, W.; Zheng, C.; Liu, Q.; Wang, J. Adaptive multiple graph regularized semi-supervised extreme learning machine. Soft Comput. 2018, 22, 3545–3562. [Google Scholar] [CrossRef]
- Qi, M.; Wang, T.; Liu, F.; Zhang, B.; Wang, J.; Yi, Y. Unsupervised feature selection by regularized matrix factorization. Neurocomputing 2018, 273, 593–610. [Google Scholar] [CrossRef]
- Chum, O.; Mikulik, M.; Perdoch, M.; Matas, J. Total recall II: Query expansion revisited. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Colorado Springs, CO, USA, 20–25 June 2011; pp. 889–896. [Google Scholar]
- Zhang, S.; Yang, M.; Cour, T.; Yu, K.; Metaxas, D. Query specific rank fusion for image retrieval. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 803–815. [Google Scholar] [CrossRef]
- Cernadas, E.; Fernández-Delgado, M.; González-Rufino, E. Influence of normalization and color space to color texture classification. Pattern Recognit. 2017, 61, 120–138. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Name | Image Size | Class | Images in Each Class | Images Total | Format | Website |
|---|---|---|---|---|---|---|---|
| 1 | Coil-100 (Rotation) | 128 × 128 | 100 | 72 | 7200 | JPG | http://www.cs.columbia.edu/CAVE/software/softlib/coil-100.php |
| 2 | Face95 | 180 × 200 | 72 | 20 | 1440 | JPG | https://cswww.essex.ac.uk/mv/allfaces/faces95.html |
| 3 | Face96 | 196 × 196 | 91 | 19 or 20 | 1814 | JPG | https://cswww.essex.ac.uk/mv/allfaces/faces96.html |
| 4 | Outex-00031 (Scale) | 128 × 128 | 68 | 40 | 2720 | BMP | http://lagis-vi.univ-lille1.fr/datasets/outex.html |
| 5 | Outex-00032 (Noise) | 128 × 128 | 68 | 40 | 2720 | BMP | http://lagis-vi.univ-lille1.fr/datasets/outex.html |
| 6 | Outex-00033 (Blur) | 128 × 128 | 68 | 40 | 2720 | BMP | http://lagis-vi.univ-lille1.fr/datasets/outex.html |
| 7 | Outex-00034 (illumination) | 128 × 128 | 204 | 20 | 4080 | BMP | http://lagis-vi.univ-lille1.fr/datasets/outex.html |
| 8 | MIT-VisTex | 128 × 128 | 40 | 16 | 640 | PPM | http://vismod.media.mit.edu/pub/VisTex/ |
| Method | Performance | Dataset | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Coil-100 | Face95 | Face96 | Outex-00031 | Outex-00032 | Outex-00033 | Outex-00034 | MIT-VisTex | ||
| LPCP | (Wa*, Wb*) | (6, 5) | (6, 6) | (6, 6) | (6, 1) | (5, 1) | (6, 4) | (6, 4) | (5, 4) |
| APR (%) | 99.47 | 92.33 | 97.03 | 89.62 | 84.86 | 87.80 | 84.36 | 98.33 | |
| RILPCP | (Wa*, Wb*) | (5, 5) | (6, 6) | (6, 6) | (5, 1) | (5, 1) | (6, 3) | (4, 4) | (5, 2) |
| APR (%) | 99.44 | 97.12 | 97.77 | 89.53 | 84.40 | 87.55 | 84.06 | 97.22 | |
| ULPCP | (Wa*, Wb*) | (4, 6) | (6, 6) | (6, 6) | (5, 1) | (5, 1) | (6, 3) | (5, 4) | (3, 2) |
| APR (%) | 99.52 | 96.65 | 97.45 | 89.44 | 84.07 | 87.59 | 84.20 | 97.39 | |
| Method | Performance | Dataset | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Coil-100 | Face95 | Face96 | Outex-00031 | Outex-00032 | Outex-00033 | Outex-00034 | MIT-VisTex | ||
| LBP | APR (%) | 89.83 | 63.45 | 64.93 | 77.99 | 69.42 | 75.54 | 46.29 | 93.37 |
| ARR (%) | 12.48 | 31.73 | 32.55 | 19.50 | 17.35 | 18.89 | 23.14 | 58.36 | |
| RILBP | APR (%) | 84.53 | 59.78 | 61.19 | 76.57 | 67.00 | 74.13 | 45.93 | 89.75 |
| ARR (%) | 11.74 | 29.89 | 30.68 | 19.14 | 16.75 | 18.53 | 22.96 | 56.09 | |
| ULBP | APR (%) | 85.40 | 58.25 | 59.42 | 76.03 | 65.68 | 73.04 | 45.51 | 90.83 |
| ARR (%) | 11.86 | 29.12 | 29.79 | 19.01 | 16.42 | 18.26 | 22.75 | 56.77 | |
| LPCP | APR (%) | 99.47 | 92.33 | 97.03 | 89.62 | 84.86 | 87.80 | 84.36 | 98.33 |
| ARR (%) | 13.82 | 46.16 | 48.67 | 22.40 | 21.21 | 21.99 | 42.18 | 61.46 | |
| RILPCP | APR (%) | 99.44 | 97.12 | 97.77 | 89.53 | 84.40 | 87.55 | 84.06 | 97.22 |
| ARR (%) | 13.81 | 48.56 | 49.04 | 22.38 | 21.10 | 21.89 | 42.03 | 60.76 | |
| ULPCP | APR (%) | 99.52 | 96.65 | 97.45 | 89.44 | 84.07 | 87.59 | 84.20 | 97.39 |
| ARR (%) | 13.82 | 48.33 | 48.88 | 22.36 | 21.02 | 21.90 | 42.10 | 60.87 | |
| Method | Performance | Dataset | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Coil-100 | Face95 | Face96 | Outex-00031 | Outex-00032 | Outex-00033 | Outex-00034 | MIT-VisTex | ||
| mdLBP | APR (%) | 92.34 | 72.97 | 79.09 | 69.51 | 59.60 | 65.63 | 48.66 | 97.05 |
| ARR (%) | 12.83 | 36.49 | 39.66 | 17.38 | 14.90 | 16.41 | 24.33 | 60.65 | |
| maLBP | APR (%) | 88.33 | 67.94 | 73.99 | 70.42 | 60.24 | 65.42 | 44.53 | 95.80 |
| ARR (%) | 12.27 | 33.97 | 37.10 | 17.60 | 15.06 | 16.36 | 22.27 | 59.87 | |
| CDH | APR (%) | 98.18 | 94.69 | 94.97 | 85.49 | 79.65 | 82.90 | 74.03 | 94.03 |
| ARR (%) | 13.64 | 47.35 | 47.63 | 21.37 | 19.91 | 20.73 | 37.02 | 58.77 | |
| MTH | APR (%) | 98.45 | 89.15 | 92.28 | 80.74 | 74.63 | 79.98 | 65.10 | 91.97 |
| ARR (%) | 13.67 | 44.57 | 46.28 | 20.18 | 18.66 | 20.00 | 32.55 | 57.48 | |
| MSD | APR (%) | 98.01 | 92.97 | 89.94 | 77.16 | 72.46 | 76.16 | 66.32 | 92.20 |
| ARR (%) | 13.61 | 46.48 | 45.11 | 19.29 | 18.12 | 19.04 | 33.16 | 57.63 | |
| OCLBP | APR (%) | 85.40 | 64.40 | 64.55 | 80.76 | 69.25 | 77.99 | 56.13 | 92.42 |
| ARR (%) | 11.86 | 32.20 | 32.37 | 20.19 | 17.31 | 19.50 | 28.07 | 57.76 | |
| IOCLBP | APR (%) | 89.12 | 66.47 | 73.24 | 83.84 | 74.54 | 80.75 | 73.58 | 95.59 |
| ARR (%) | 12.38 | 33.24 | 36.73 | 20.96 | 18.63 | 20.19 | 36.79 | 59.75 | |
| OC-LBP+CH | APR (%) | 95.63 | 80.50 | 88.67 | 85.07 | 75.93 | 81.33 | 72.18 | 92.20 |
| ARR (%) | 13.28 | 40.25 | 44.46 | 21.27 | 18.98 | 20.33 | 36.09 | 57.63 | |
| LPCP | APR (%) | 99.47 | 92.33 | 97.03 | 89.62 | 84.86 | 87.80 | 84.36 | 98.33 |
| ARR (%) | 13.82 | 46.16 | 48.67 | 22.40 | 21.21 | 21.99 | 42.18 | 61.46 | |
| RILPCP | APR (%) | 99.44 | 97.12 | 97.77 | 89.53 | 84.40 | 87.55 | 84.06 | 97.22 |
| ARR (%) | 13.81 | 48.56 | 49.04 | 22.38 | 21.10 | 21.89 | 42.03 | 60.76 | |
| ULPCP | APR (%) | 99.52 | 96.65 | 97.45 | 89.44 | 84.07 | 87.59 | 84.20 | 97.39 |
| ARR (%) | 13.82 | 48.33 | 48.88 | 22.36 | 21.02 | 21.90 | 42.10 | 60.87 | |
| Method | Feature Vector Length (D) | Memory Consumption (Kb) |
|---|---|---|
| mdLBP | 2048 | 16.00 |
| maLBP | 1024 | 8.00 |
| CDH | 108 | 0.84 |
| MTH | 82 | 0.64 |
| MSD | 78 | 0.61 |
| OCLBP | 1535 | 11.99 |
| IOCLBP | 3072 | 24.00 |
| OC-LBP+CH | 108 | 0.84 |
| LPCP | 760/844/844/424/400/676/676/616 | 5.94/6.59/6.59/3.31/3.13/5.28/5.28/4.81 |
| RILPCP | 468/624/624/180/180/372/336/252 | 3.66/4.88/4.88/1.41/1.41/2.91/2.63/1.97 |
| ULPCP | 479/647/647/203/203/395/419/203 | 3.74/5.05/5.05/1.59/1.59/3.09/3.27/1.59 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Q.; Hao, Q.; Sbert, M.; Yi, Y.; Wei, Y.; Dai, J. Local Parallel Cross Pattern: A Color Texture Descriptor for Image Retrieval. Sensors 2019, 19, 315. https://doi.org/10.3390/s19020315
Feng Q, Hao Q, Sbert M, Yi Y, Wei Y, Dai J. Local Parallel Cross Pattern: A Color Texture Descriptor for Image Retrieval. Sensors. 2019; 19(2):315. https://doi.org/10.3390/s19020315
Chicago/Turabian StyleFeng, Qinghe, Qiaohong Hao, Mateu Sbert, Yugen Yi, Ying Wei, and Jiangyan Dai. 2019. "Local Parallel Cross Pattern: A Color Texture Descriptor for Image Retrieval" Sensors 19, no. 2: 315. https://doi.org/10.3390/s19020315
APA StyleFeng, Q., Hao, Q., Sbert, M., Yi, Y., Wei, Y., & Dai, J. (2019). Local Parallel Cross Pattern: A Color Texture Descriptor for Image Retrieval. Sensors, 19(2), 315. https://doi.org/10.3390/s19020315