Pose Estimation for Straight Wing Aircraft Based on Consistent Line Clustering and Planes Intersection

Abstract
:1. Introduction
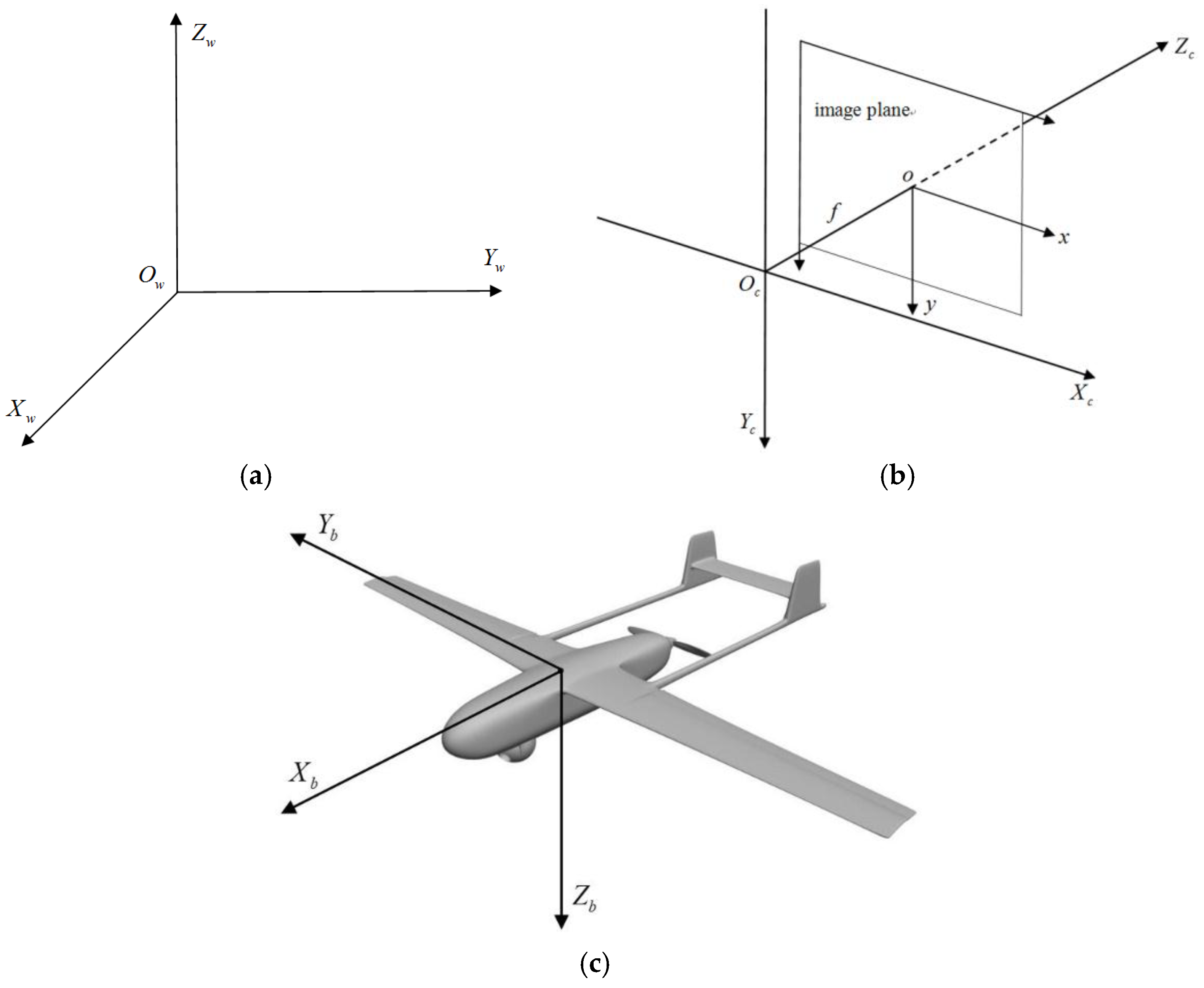
2. Coordinate System Definition
3. Pose Estimation Algorithm
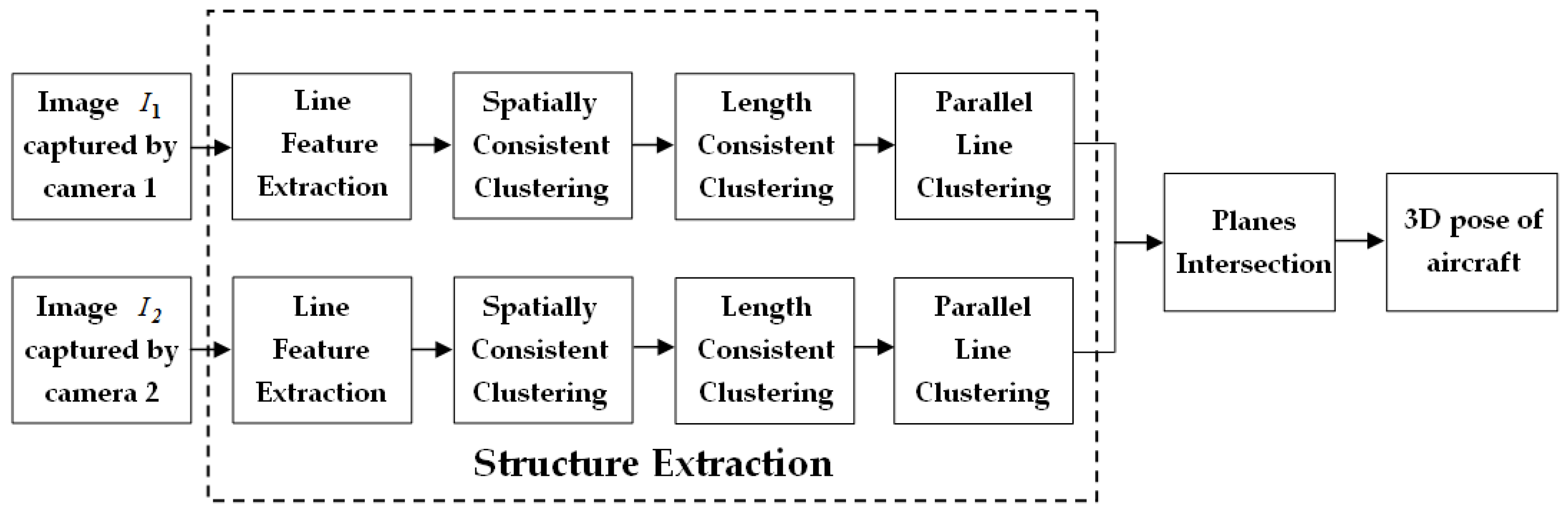
3.1. Structure Extraction Method
- Line features distributed along the wing axis are approximately parallel to each other;
- Line features along the fuselage reference line are approximately parallel to each other.
3.1.1. Line Feature Extraction
3.1.2. Spatially Consistent Line Clustering
3.1.3. Length-Consistent Line Clustering
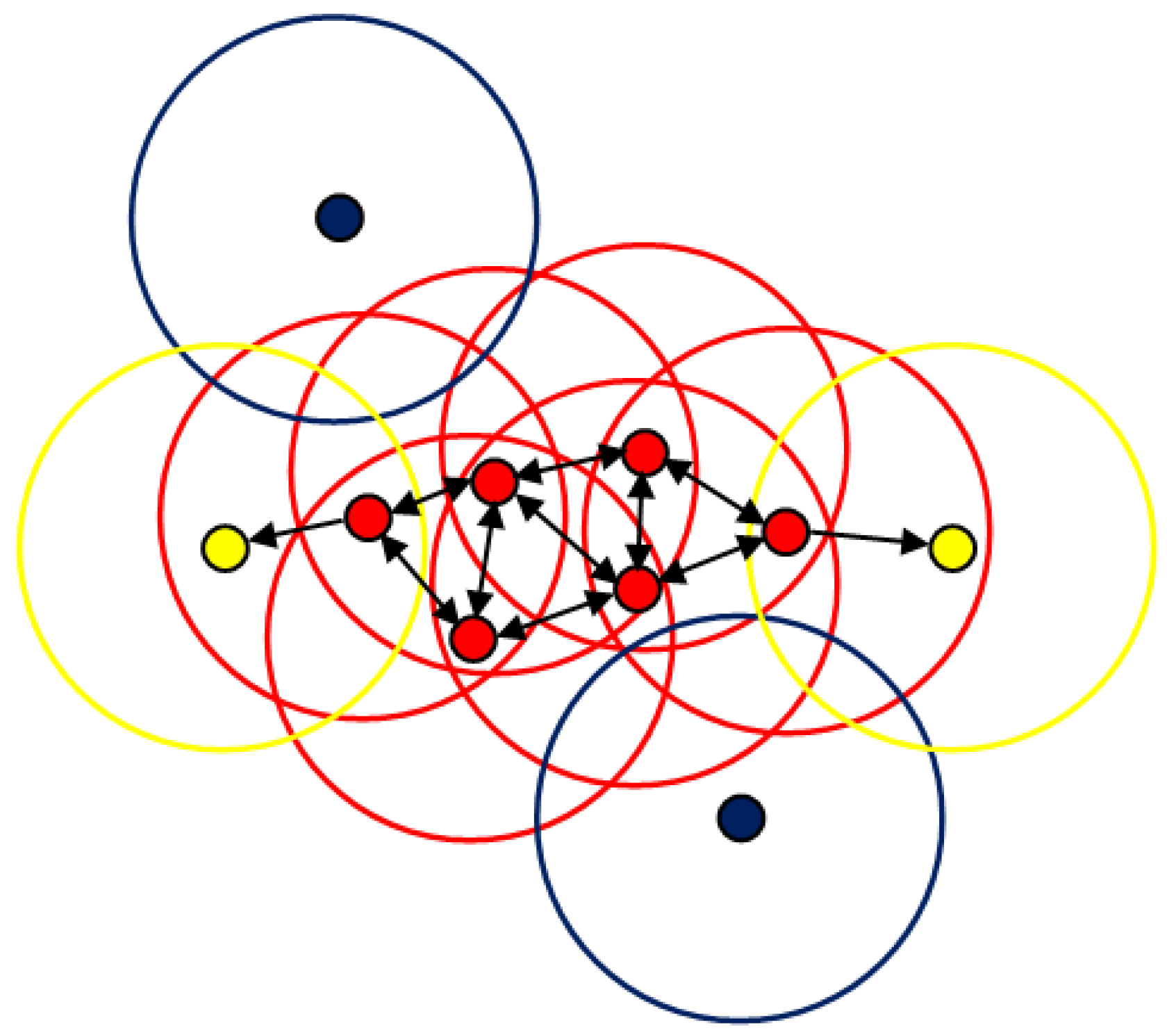
3.1.4. Parallel Line Clustering
- For every data point , search points in its neighborhood and use to determine the core points in the set .
- Ignore all non-core points and group core points into parallel line clusters based on the connected components on the neighborhood graph (as indicated by two-way arrows in Figure 4).
- For every non-core point, if it is in the neighborhood of a cluster, it is the border point of the cluster; otherwise, it is a noise point.
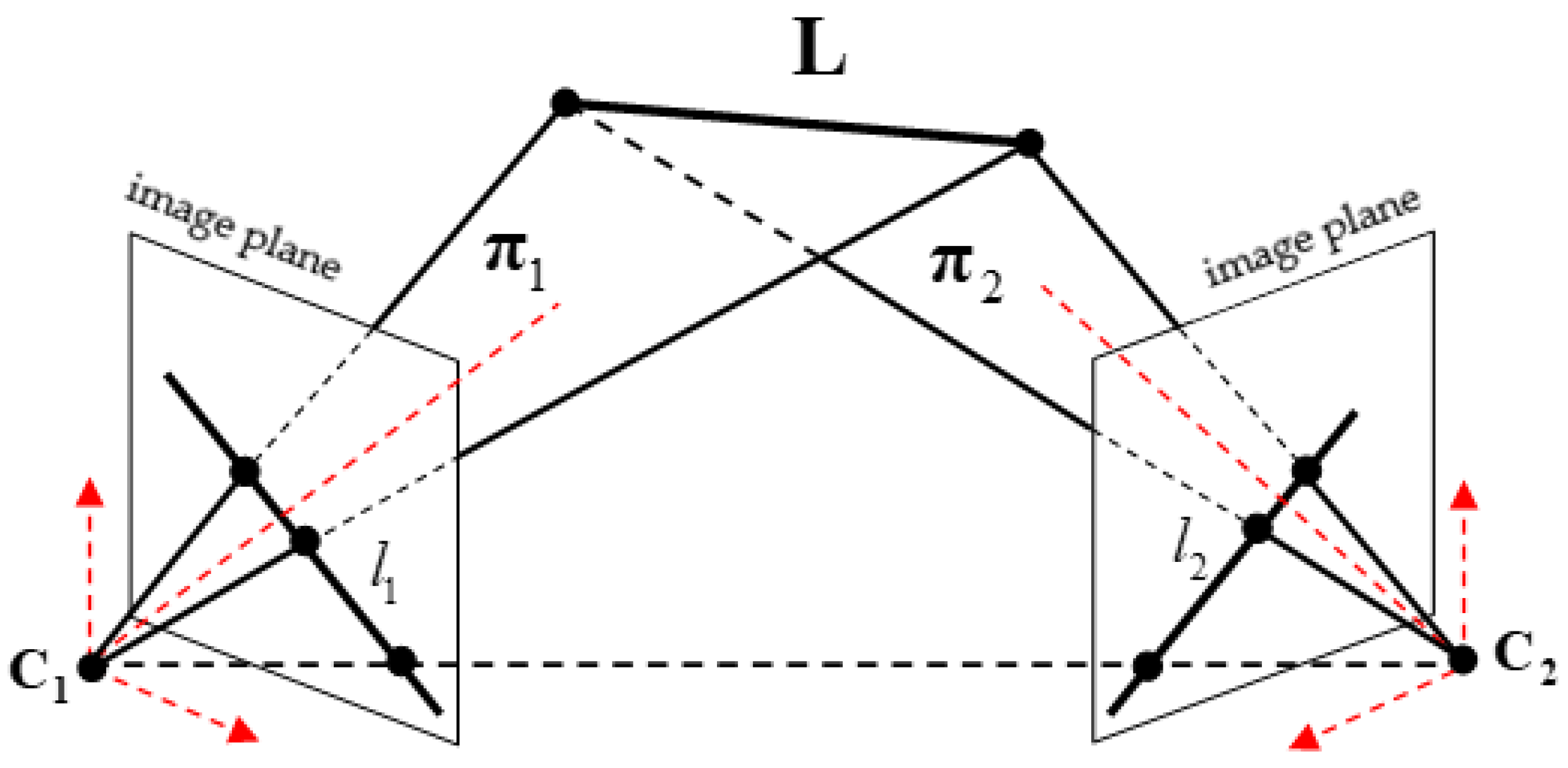
3.2. Planes Intersection Method
3.3. Algorithm Summary
| Algorithm 1: Pose estimation based on consistent line clustering and planes intersection | |
| Input: | The image pair , the two camera matrices , , and the initial pose constraint. |
| Output: | The 3D position and 3D attitude of the straight wing aircraft. |
| Step 1 | Extract line features in image pairs using the LSD algorithm; |
| Step 2 | Locate the center of the aircraft in the 2D images and cluster spatially consistent line segments; |
| Step 3 | Rule out line segments shorter than a certain threshold; |
| Step 4 | Classify line segments into orientation-consistent clusters, extract the directions of the fuselage and the wings in the image pair, and re-estimate the center of the aircraft; |
| Step 5 | Calculate the 3D attitude and 3D location using the plane–plane intersection method. |
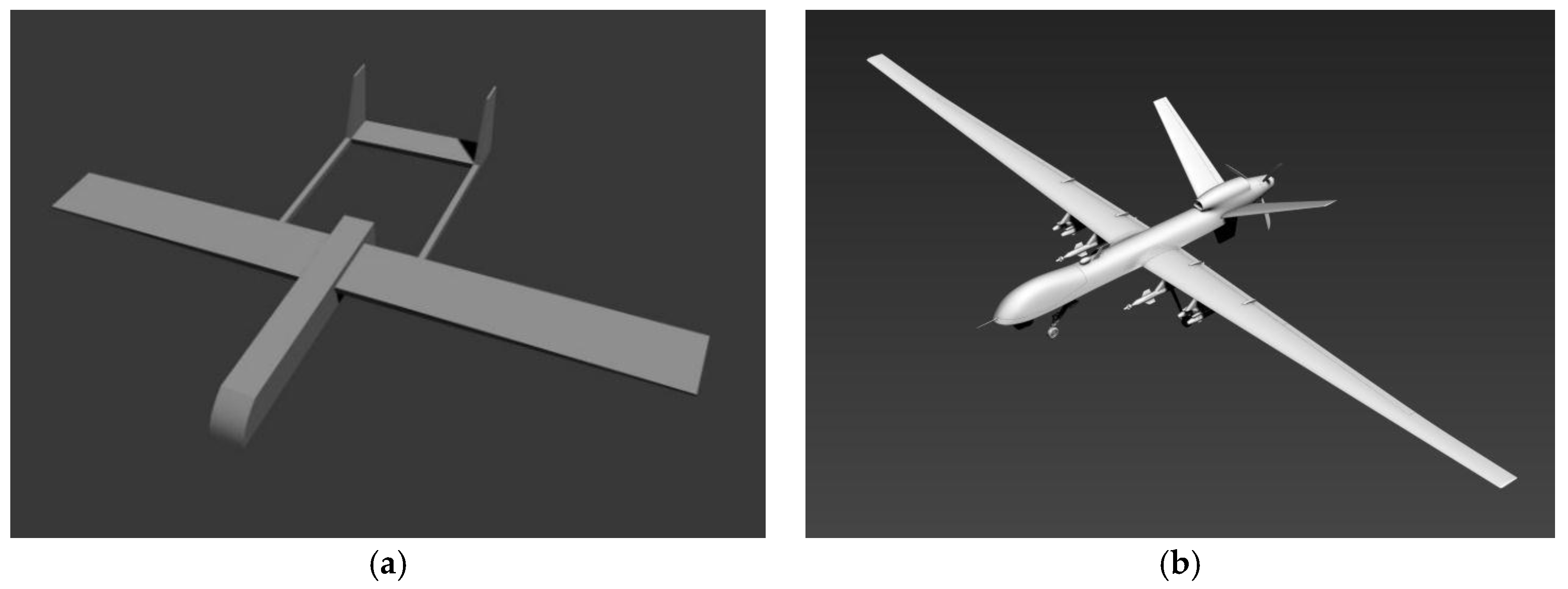
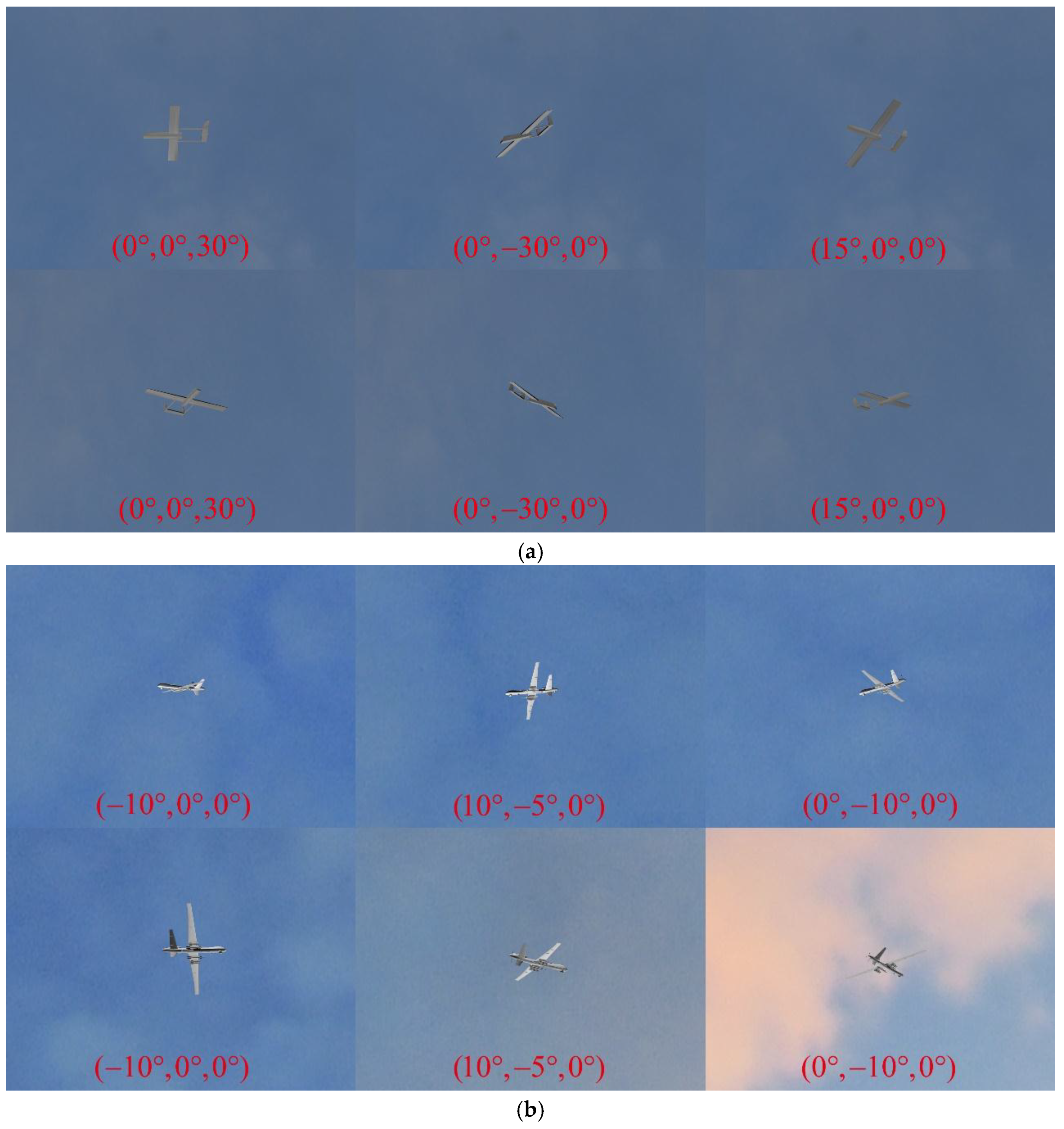
4. Experiments and Results
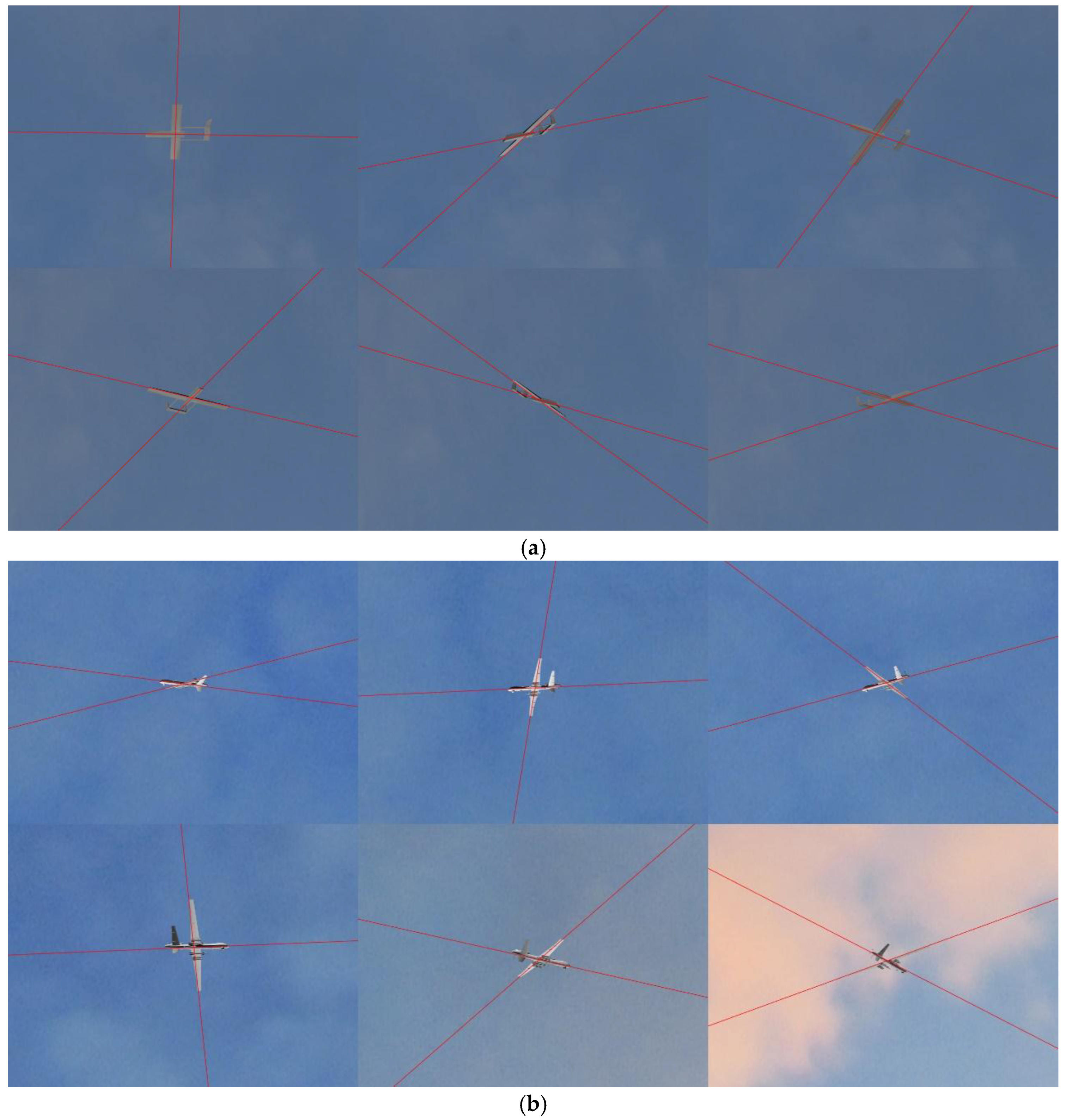
4.1. Experimental Results of Structure Extraction
- The structure of the aircraft (fuselage or wings) does not satisfy the assumption of parallel line clustering, i.e., the line segments distributed along this structure are not parallel to each other in the image (see row 1, Figure 9).
- Some parts of the aircraft (tail or external mounts) or the background affect the consistent line clustering (see row 2, Figure 9).
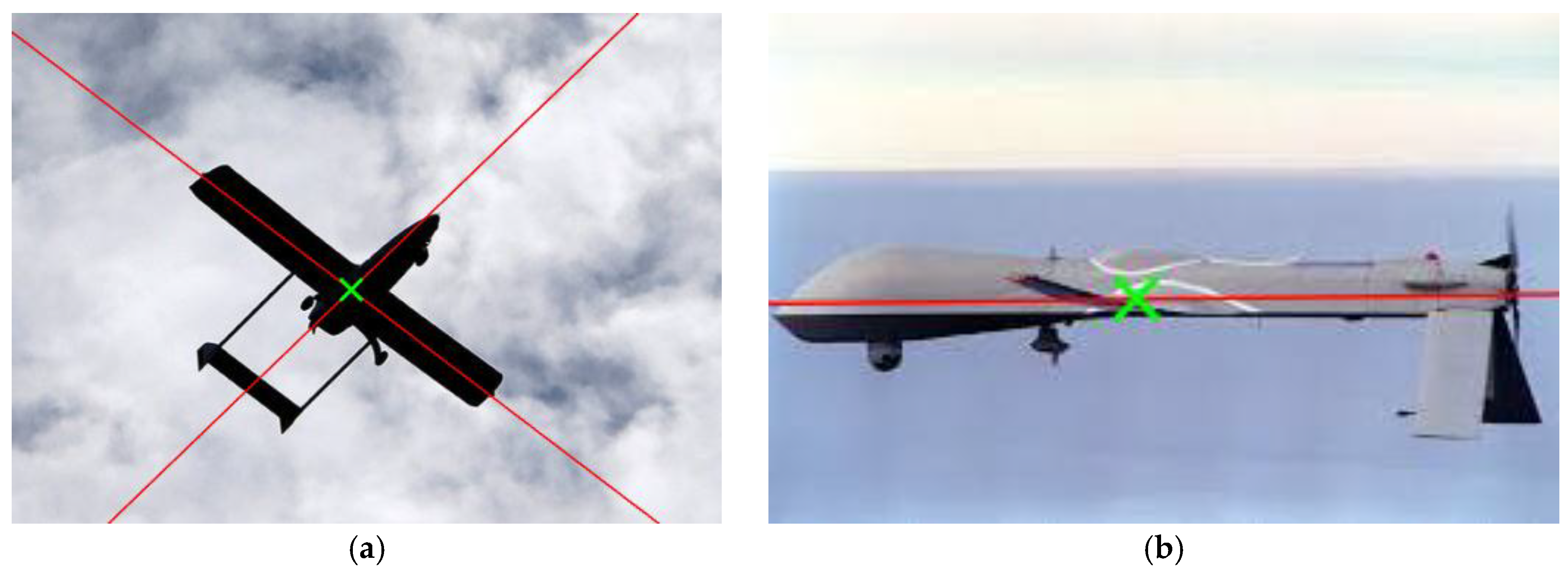
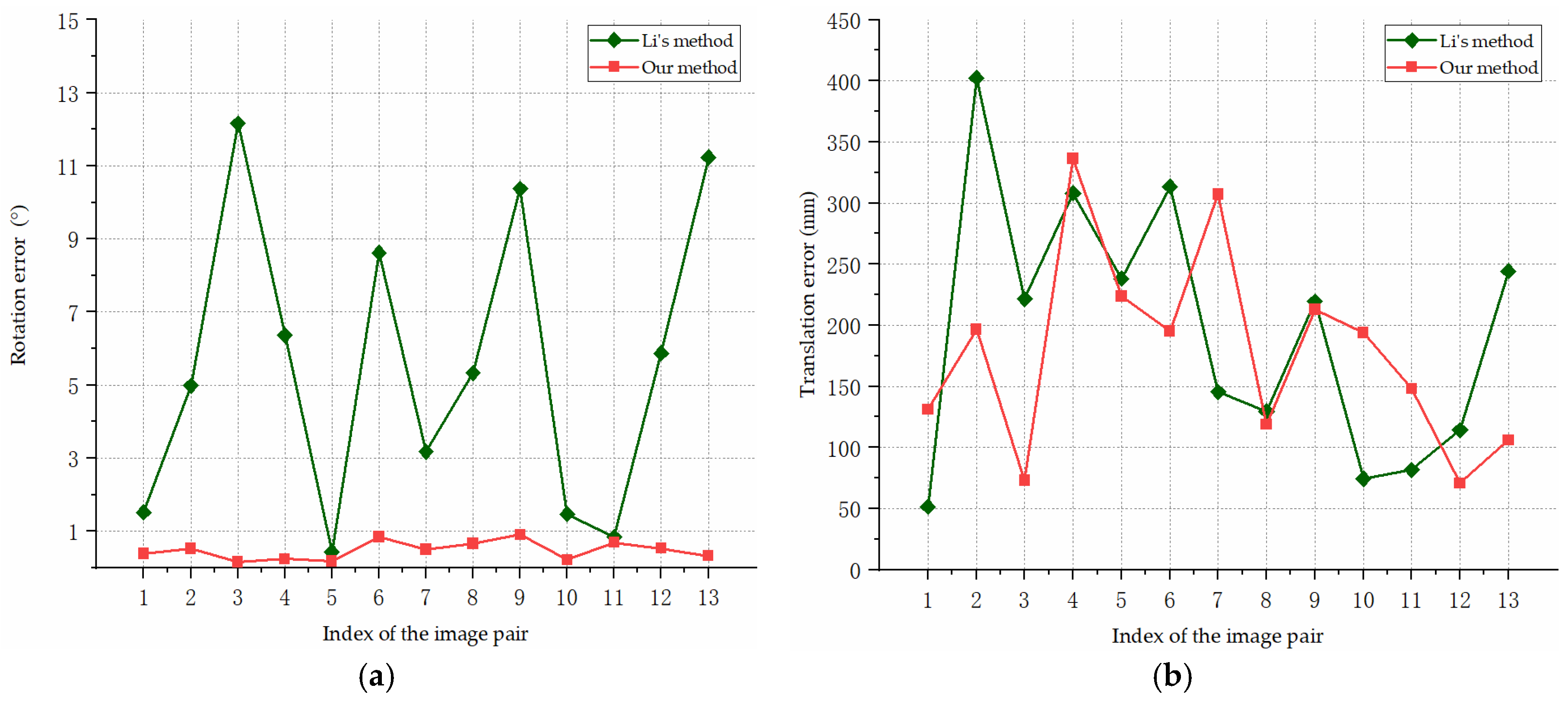
4.2. Experimental Results of Pose Estimation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kok, M.; Hol, J.D.; Schön, T.B. Using inertial sensors for position and orientation estimation. Found. Trends Signal Process. 2018, 11, 1–153. [Google Scholar] [CrossRef]
- Santos, N.P.; Melício, F.; Lobo, V.; Bernardino, A. A ground-based vision system for UAV pose estimation. Int. J. Robot. Mechatron. 2015, 1, 138–144. [Google Scholar] [CrossRef]
- Langelaan, J.W. State Estimation for Autonomous Flight in Cluttered Environments. J. Guid. Control Dyn. 2007, 30, 1414–1426. [Google Scholar] [CrossRef]
- Ward, D.G.; Monaco, J.F.; Bodson, M. Development and flight testing of a parameter identification algorithm for reconfigurable control. J. Guid. Control Dyn. 1998, 21, 948–956. [Google Scholar] [CrossRef]
- Proud, A.W. Close formation flight control. J. Guid. Control Dyn. 1999, 24, 246–254. [Google Scholar] [CrossRef]
- Yang, Z.; Li, C. Review on vision-based pose estimation of UAV based on landmark. In Proceedings of the IEEE International Conference on Frontiers of Sensors Technologies (ICFST), Shenzhen, China, 14–16 April 2017. [Google Scholar]
- Chen, L.; Guo, B.; Sun, W. Relative pose measurement algorithm of non-cooperative target based on stereo vision and RANSAC. Int. J. Soft Comput. Softw. Eng. 2012, 2, 26–35. [Google Scholar] [CrossRef]
- Li, R.; Zhou, Y.; Chen, F.; Chen, Y. Parallel vision-based pose estimation for non-cooperative spacecraft. Adv. Mech. Eng. 2015, 7. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Zhu, F.; Hao, Y.; Pan, W. Optimization-based non-cooperative spacecraft pose estimation using stereo cameras during proximity operations. Appl. Opt. 2017, 56, 4522–4531. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, L.; Zhu, F.; Hao, Y.; Pan, W. Rectangular-structure-based pose estimation method for non-cooperative rendezvous. Appl. Opt. 2018, 57, 6164–6173. [Google Scholar] [CrossRef] [PubMed]
- Deng, Y.; Xian, N.; Duan, H. A Binocular Vision-based Measuring System for UAVs Autonomous Aerial Refueling. In Proceedings of the IEEE International Conference on Control and Automation (ICCA), Kathmandu, Nepal, 1–3 June 2016. [Google Scholar]
- Zhuang, L.; Han, Y.; Fan, Y.; Cao, Y.; Wang, B.; Zhang, Q. Method of pose estimation for UAV landing. Chin. Opt. Lett. 2012, 10, S20401. [Google Scholar] [CrossRef]
- Benini, A.; Rutherford, M.J.; Valavanis, K.P. Real-time GPU-based Pose Estimation of a UAV for Autonomous Takeoff and Landing. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Tai, J.M.; Fieguth, P.W. Incremental Shape Reconstruction using Stereo Image Sequences. In Proceedings of the International Conference on Image Processing, Vancouver, BC, Canada, 10–13 September 2000. [Google Scholar]
- Alix, D.; Walli, K.; Raquet, J. Error characterization of flight trajectories reconstructed using Structure from Motion. In Proceedings of the IEEE Applied Imagery Pattern Recognition Workshop, Washington, DC, USA, 14–16 October 2014. [Google Scholar]
- Huang, Y.P.; Sithole, L.; Lee, T.T. Structure from motion technique for scene detection using autonomous drone navigation. IEEE Trans. Syst. Man Cybern. Syst. 2017, 1–12. [Google Scholar] [CrossRef]
- Schneider, J.; Eling, C.; Klingbeil, L.; Kuhlmann, H.; Förstner, W.; Stachniss, C. Fast and effective online pose estimation and mapping for UAVs. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Andert, F.; Mejias, L. Improving monocular SLAM with altimeter hints for fixed-wing aircraft navigation and emergency landing. In Proceedings of the IEEE International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015. [Google Scholar]
- Mary, A.; Gerhard, H. Pose estimation of a mobile robot based on fusion of IMU data and vision data using an extended Kalman filter. Sensors 2017, 17, 2164. [Google Scholar] [CrossRef]
- Konovalenko, I.; Kuznetsova, E.; Miller, A.; Miller, B.; Popov, A.; Shepelev, D.; Stepanyan, K. New Approaches to the Integration of Navigation Systems for Autonomous Unmanned Vehicles (UAV). Sensors 2018, 18, 3010. [Google Scholar] [CrossRef] [PubMed]
- Hmam, H.; Kim, J. Aircraft recognition and pose estimation. In Proceedings of the Visual Communications and Image Processing, Perth, Australia, 20–23 June 2000. [Google Scholar]
- Wang, L.; Xing, C.; Yan, J. Aircraft pose estimation based on mathematical morphological algorithm and Radon transform. In Proceedings of the International Conference on Fuzzy Systems and Knowledge Discovery, Shanghai, China, 26–28 July 2011. [Google Scholar]
- Breuers, M.; Reus, N. Image-based aircraft pose estimation: A comparison of simulations and real-world data. In Proceedings of the Automatic target recognition XI, Orlando, FL, USA, 17–20 April 2001. [Google Scholar]
- Fu, T.; Sun, X. The relative pose estimation of aircraft based on contour model. In Proceedings of the International Conference on Optical and Photonics Engineering, Xi’an, China, 14–17 October 2016. [Google Scholar]
- Wang, X.; Yu, H.; Feng, D. Pose estimation in runway end safety area using geometry structure features. Aeronaut. J. 2016, 120, 675–691. [Google Scholar] [CrossRef]
- Yuan, W.; Peng, J.; Wang, L.; Lin, S. Aircraft Pose Recognition Using Locally Linear Embedding. In Proceedings of the International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009. [Google Scholar]
- Luo, J.; Teng, X.; Zhang, X.; Zhong, L. Structure extraction of straight wing aircraft using consistent line clustering. In Proceedings of the International Conference on Image, Vision and Computing (ICIVC), Chengdu, China, 2–4 June 2017. [Google Scholar]
- Sadraey, M.H. Aircraft Design: A Systems Engineering Approach, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2013; pp. 160–249. ISBN 9781119953401. [Google Scholar]
- Kholish, R.K.; Aditya, P.; Mochammad, A.M. Design of high altitude long endurance UAV: Structural analysis of composite wing using finite element method. J. Phys. Conf. Ser. 2018, 1005, 012025. [Google Scholar] [CrossRef]
- Park, K.; Han, J.W.; Lim, H.J.; Kim, B.S.; Lee, J. Optimal design of airfoil with high aspect ratio in unmanned aerial vehicles. Int. J. Aerosp. Mech. Eng. 2008, 2, 381–387. [Google Scholar] [CrossRef]
- Gioi, R.G.; Jakubowicz, J.; Morel, J.; Randall, G. LSD: A Fast Line Segment Detector with a False Detection Control. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 722–732. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liu, Y.; Zou, Z. Comparative study of line extraction method based on repeatability. J. Comput. Inf. Syst. 2012, 8, 10097–10104. [Google Scholar]
- Comaniciu, D.; Meer, P. Mean shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996. [Google Scholar]
- Arthur, D.; Vassilvitskii, S. K-Means++: The Advantages of Careful Seeding. In Proceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms, New Orleans, LA, USA, 7–9 January 2007. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004; pp. 310–324. ISBN 9780521540513. [Google Scholar]
- AUTODESK. Available online: https://www.autodesk.com/ (accessed on 6 December 2017).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera | Focal Length | Field of View | Image Resolution | Location | |
|---|---|---|---|---|---|
| Scene 1 | 1 | 70 mm | |||
| 2 | 75 mm | ||||
| Scene 2 | 1 | 300 mm | |||
| 2 | 275 mm |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teng, X.; Yu, Q.; Luo, J.; Zhang, X.; Wang, G. Pose Estimation for Straight Wing Aircraft Based on Consistent Line Clustering and Planes Intersection. Sensors 2019, 19, 342. https://doi.org/10.3390/s19020342
Teng X, Yu Q, Luo J, Zhang X, Wang G. Pose Estimation for Straight Wing Aircraft Based on Consistent Line Clustering and Planes Intersection. Sensors. 2019; 19(2):342. https://doi.org/10.3390/s19020342
Chicago/Turabian StyleTeng, Xichao, Qifeng Yu, Jing Luo, Xiaohu Zhang, and Gang Wang. 2019. "Pose Estimation for Straight Wing Aircraft Based on Consistent Line Clustering and Planes Intersection" Sensors 19, no. 2: 342. https://doi.org/10.3390/s19020342
APA StyleTeng, X., Yu, Q., Luo, J., Zhang, X., & Wang, G. (2019). Pose Estimation for Straight Wing Aircraft Based on Consistent Line Clustering and Planes Intersection. Sensors, 19(2), 342. https://doi.org/10.3390/s19020342