An LSTM-Method-Based Availability Prediction for Optimized Offloading in Mobile Edges



Abstract
:1. Introduction
- By predicting the availability of MEC-BS, we can reserve resources for tasks in advance, thereby reducing the heavy load of MEC-BS and ensuring service connectivity. The availability of MEC-BS is related to two aspects. The first is the admission control of the MEC-BS, and the other is the user’s dwell time, and then we decompose it into several prediction problems based on EMD, then separately predict based on LSTM method, and finally use the sum of predicted sub-data results as the output of the entire model.
- In our optimization algorithm, local computing and MEC-BS computations were considered separately. They evaluated energy efficiency costs (EEC)(completing time, energy consumption and availability of MEC-BS), then transforms our algorithm into EEC minimization. The weight of the above three aspects is used to adjust the deviation between them, and we can flexibly adapt to different needs.
- In order to solve the optimization problem, we use game theory to solve this problem. The above problem is defined as a distributed potential game problem by studying the limited improved properties and the potential game Nash Equilibrium.
2. Related Works
2.1. Computational Offloading Performance and Energy Consumption Issues
2.2. Computational Offloading Problem in the Internet of Vehicles Scenario
2.3. Intermittent Connection Problems in Mobile Edge Network Architecture
3. System Model and Formulation
3.1. Network Model
- 1.
- The mutual interference between the vehicle and the vehicle, MEC-BS and MEC-BS are negligible.
- 2.
- A vehicle can request one of MEC-BS servers for request task processing.
- 3.
- The vehicle trajectories follow the poisson distribution [23], all vehicles travel in the same direction at a constant speed.
3.2. Communication Model
3.3. Computation Model
3.3.1. Local Computing
3.3.2. MEC-BS Computing
3.4. Centralized Optimization Problem
4. Computation Offloading Game
4.1. Game Formulation
4.2. The Existence of NE
4.3. Algorithm Description
| Algorithm 1 Computation Offloading Decision for vehicle V |
| Require: M:a sequence of M tasks of vehicle V |
| :maximum tolerance time |
| : maximum number of iterations |
| Ensure::optimal offloading decision |
| Initialization:,,,,, and iteration index |
| for to M do |
| while do |
| compute ,, by (1)–(3), respectively |
| compute |
| compute from Availability Prediction |
| compute , , , by (6)–(8)(10), respectively |
| compute , , respectively |
| compute |
| if then |
| else |
| end if |
| update |
| end while |
| end for |
5. Vehicle Mobility Prediction: MEC-BS Availability Estimation
5.1. MEC-BS Admission Control Based on Distance Priority
5.2. Mobility Problem: Estimated Dwell Time
5.3. Availability Prediction Based EMD and Deep Learning
5.3.1. Data Preprocessing
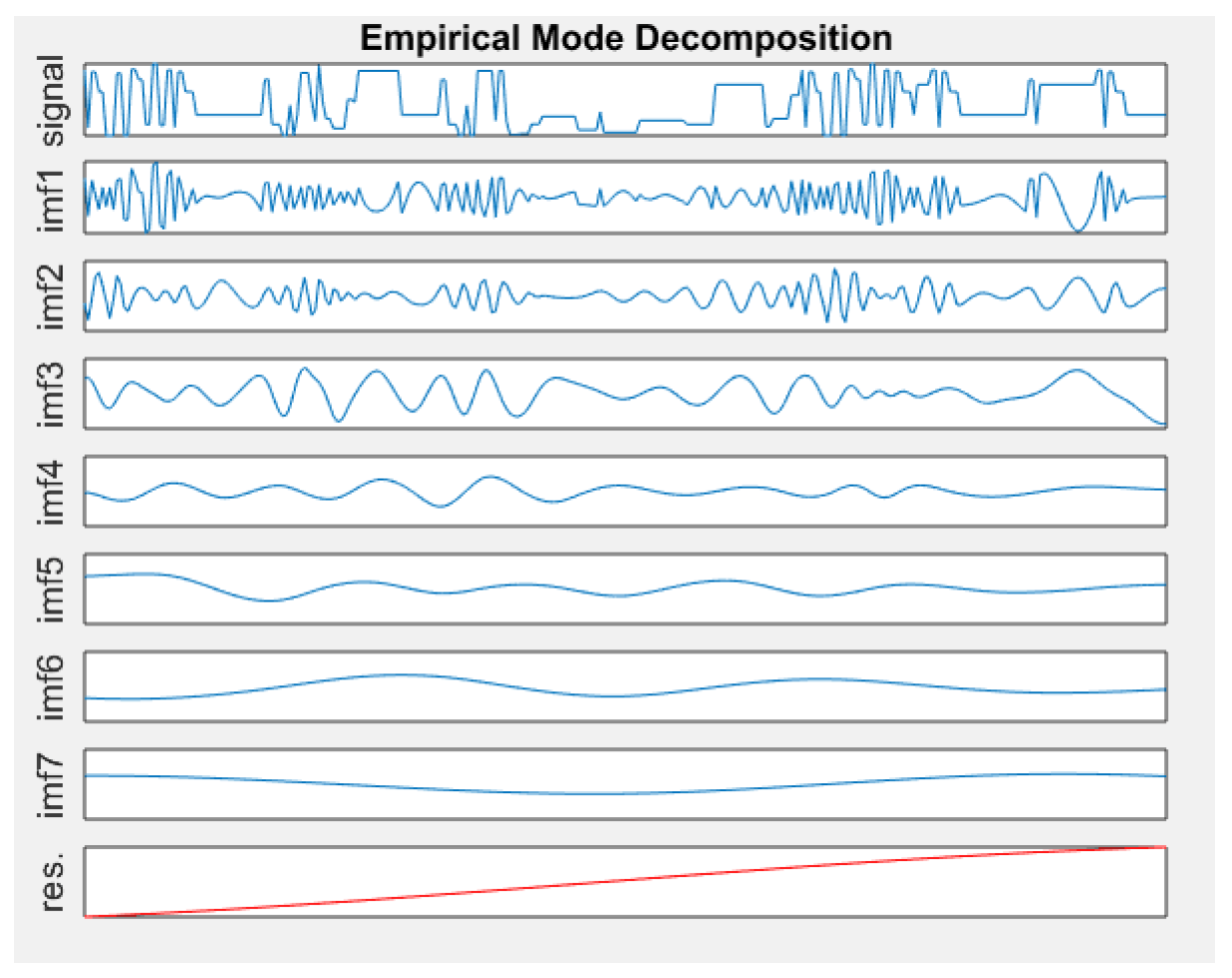
5.3.2. EMD Decomposition
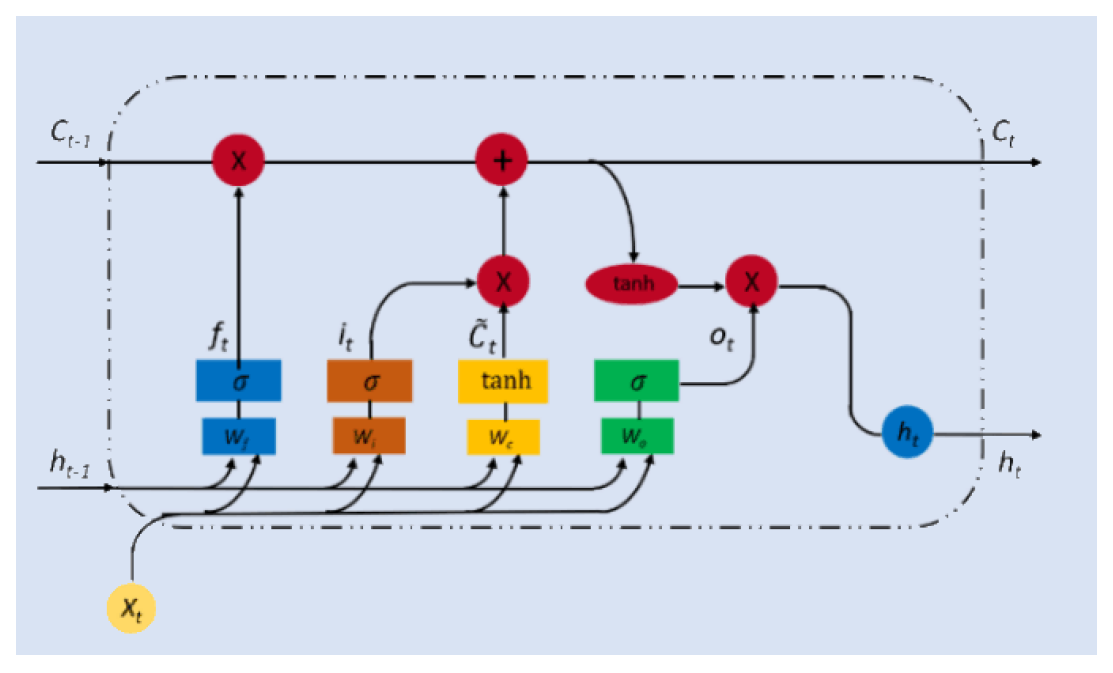
5.3.3. LSTM Method for Prediction
6. Performance Analysis
6.1. Experiment Profile
6.2. Evaluation the LSTM Model
6.3. Evaluation the Availability of MEC-BS
6.4. Impact of Weights
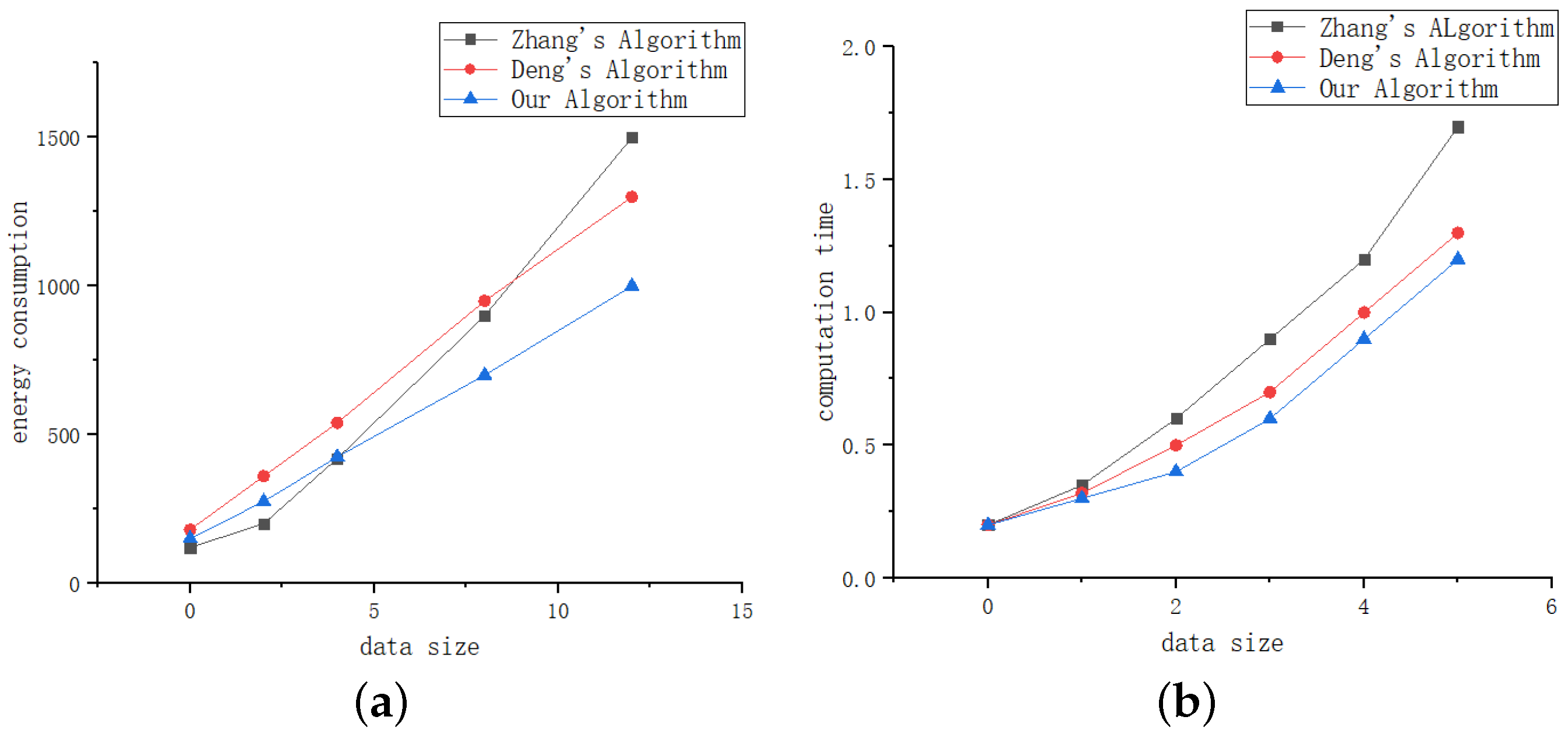
6.5. Evaluation and comparison of the proposed algorithm
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zikria, Y.B.; Kim, S.W.; Hahm, O.; Afzal, M.K.; Aalsalem, M.Y. Internet of Things (IoT) Operating Systems Management: Opportunities, Challenges, and Solution. Sensors 2019, 8, 1793. [Google Scholar] [CrossRef]
- Zikria, Y.B.; Yu, H.; Afzal, M.K.; Rehmani, M.H.; Hahm, O. Internet of Things (IoT): Operating System, Applications and Protocols Design, and Validation Techniques. Futur. Gener. Comput. Syst. 2018, 88, 699–706. [Google Scholar] [CrossRef]
- Rasool, I.U.; Zikria, Y.B.; Kim, S.W. A Review of WAVE Multichannel Operational MAC Protocols: QoS Analysis and Other Related Issues. Sage Hindawi Int. J. Distrib. Sens. Netw. 2017, 13, 1–22. [Google Scholar]
- Zhang, K.; Mao, Y.; Leng, S.; Vinel, A.; Zhang, Y. Delay constrained offloading for mobile edge computing in cloud-enabled vehicular networks. In Proceedings of the 8th International Workshop on Resilient Networks Design and Modeling (RNDM), Halmstad, Sweden, 13–15 September 2016. [Google Scholar]
- Qiu, T.; Wang, H.; Li, K.; Ning, H.; Sangaiah, A.K.; Chen, B. SIGMM: A Novel Machine Learning Algorithm for Spammer Identification in Industrial Mobile Cloud Computing. IEEE Trans. Ind. Inform. 2018, 15, 2349–2359. [Google Scholar] [CrossRef]
- Chiang, M.; Zhang, T. Fog and IoT: An Overview of Research Opportunities. IEEE Internet Things J. 2016, 3, 854–864. [Google Scholar] [CrossRef]
- Wang, B.; Gu, X.; Yan, S. STCS: A practical solar radiation based temperature correction scheme in meteorological WSN. Int. J. Sens. Netw. 2018, 28, 22–33. [Google Scholar] [CrossRef]
- Yu, Y. Mobile Edge Computing Towards 5G: Vision, Recent Progress, and Open Challenges. China Commun. English Vers. 2016, 13, 89–99. [Google Scholar] [CrossRef]
- Mao, Y.; You, C.; Zhang, J. A Survey on Mobile Edge Computing: The Communication Perspective. IEEE Commun. Surv. 2017, 19, 2322–2358. [Google Scholar] [CrossRef] [Green Version]
- Ansari, N.; Sun, X. Mobile Edge Computing Empowers Internet of Things. IEICE Trans. Commun. 2018, E101B, 604–619. [Google Scholar] [CrossRef]
- Kaddi, M.; Khelifa, B.; Omari, M. An Energy-Efficient Protocol Using an Objective Function & Random Search with Jumps for WSN. Comput. Mater. Continua 2019, 58, 603–624. [Google Scholar] [Green Version]
- Al-Shuwaili, A.; Simeone, O.; Bagheri, A.; Scutari, G. Joint Uplink/Downlink Optimization for Backhaul-Limited Mobile Cloud Computing with User Scheduling. IEEE Trans. Signal Inf. Process. Netw. 2017, 3, 787–802. [Google Scholar] [CrossRef]
- Guo, S.; Liu, J.; Yang, Y.; Xiao, B.; Li, Z. Energy-Efficient Dynamic Computation Offloading and Cooperative Task Scheduling in Mobile Cloud Computing. IEEE Trans. Mob. Comput. 2019, 18, 319–333. [Google Scholar] [CrossRef]
- Du, J.; Zhao, L.; Feng, J.; Chu, X. Computation Offloading and Resource Allocation in Mixed Fog/Cloud Computing Systems with Min-Max Fairness Guarantee. IEEE Transa. Commun. 2018, 66, 1594–1608. [Google Scholar] [CrossRef]
- Chen, X.; Jiao, L.; Li, W.; Fu, X. Efficient Multi-User Computation Offloading for Mobile-Edge Cloud Computing. IEEE-ACM Trans. Netw. 2016, 24, 2827–2840. [Google Scholar] [CrossRef]
- Zhang, J.; Xia, W.; Yan, F.; Shen, L. Joint Computation Offloading and Resource Allocation Optimization in Heterogeneous Networks with Mobile Edge Computing. IEEE Access 2018, 6, 19324–19337. [Google Scholar] [CrossRef]
- Chen, X.; Wang, L.; Wang, X.; Jin, R. Predictive offloading in mobile-fog-cloud enabled cyber-manufacturing systems. In Proceedings of the IEEE Industrial Cyber-Physical Systems (ICPS), St. Petersburg, Russia, 15–18 May 2018. [Google Scholar]
- Deng, Y.; Chen, Z.; Zhang, D.; Zhao, M. Workload scheduling toward worst-case delay and optimal utility for single-hop Fog-IoT architecture. IET Commun. 2018, 12, 2164–2173. [Google Scholar] [CrossRef]
- Hou, X.; Li, Y.; Chen, M.; Wu, D.; Jin, D.; Chen, S. Vehicular Fog Computing: A Viewpoint of Vehicles as the Infrastructures. IEEE Trans. Veh. Technol. 2016, 65, 3860–3873. [Google Scholar] [CrossRef]
- Yu, R.; Huang, X.; Kang, J.; Ding, J.; Maharjan, S.; Gjessing, S.; Zhang, Y. Cooperative Resource Management in Cloud-Enabled Vehicular Networks. IEEE Trans. Ind. Electron. 2015, 62, 7938–7951. [Google Scholar] [CrossRef]
- Satyanarayanan, M.; Bahl, P.; Cáceres, R.; Davies, N. The Case for VM-Based Cloudlets in Mobile Computing. IEEE Pervasive Comput. 2009, 8, 14–23. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, S.; Huang, J.; Yang, F. A computation offloading algorithm based on game theory for vehicular edge networks. In Proceedings of the IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018. [Google Scholar]
- Zhang, K.; Mao, Y.; Leng, S.; He, Y.; Zhang, Y. Mobile-Edge Computing For Vehicular Networks a Promising Network Paradigm with Predictive Off-Loading. IEEE Veh. Technol. Mag. 2017, 12, 36–44. [Google Scholar] [CrossRef]
- Qiu, T.; Wang, X.; Chen, C.; Atiquzzaman, M.; Liu, L. TMED: A spider web-like transmission mechanism for emergency data in vehicular ad hoc networks. IEEE Trans. Veh. Technol. 2018, 67, 8682–8694. [Google Scholar] [CrossRef]
- Klein, A.; Mannweiler, C.; Schneider, J.; Schotten, H.D. Access schemes for mobile cloud computing. In Proceedings of the Eleventh International Conference on Mobile Data Management, Kansas City, MO, USA, 23–26 May 2010. [Google Scholar]
- Almeida, J.; Almeida, V.; Ardagna, D.; Cunha, Í.; Francalanci, C.; Trubian, M. Joint admission control and resource allocation in virtualized servers. J. Parallel Distrib. Comput. 2010, 70, 344–362. [Google Scholar] [CrossRef]
- Hoang, D.T.; Niyato, D.; Wang, P. Optimal admission control policy for mobile cloud computing hotspot with cloudlet. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 1–4 April 2012. [Google Scholar]
- Chen, X. Decentralized Computation Offloading Game for Mobile Cloud Computing. IEEE Trans. Parallel Distrib. Syst. 2015, 26, 974–983. [Google Scholar] [CrossRef]
- Wang, G.; Liu, M. Dynamic Trust Model Based on Service Recommendation in Big Data. Comput. Mater. Continua 2019, 58, 845–857. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Niyato, D.; Wang, P. Offloading in Mobile Cloudlet Systems with Intermittent Connectivity. IEEE Trans. Mob. Comput. 2015, 14, 2516–2529. [Google Scholar] [CrossRef]
- Mou, S.; Ji, Y.; Tian, C. Retail Time Series Prediction Based on EMD and Deep Learning. In Proceedings of the IEEE International Conference on Network Infrastructure and Digital Content (IC-NIDC), Guiyang, China, 22–24 August 2018. [Google Scholar]
- Dai, S.; Li, L.; Li, Z. Modeling Vehicle Interactions via Modified LSTM Models for Trajectory Prediction. IEEE Access 2019, 7, 38287–38296. [Google Scholar] [CrossRef]
- Pan, L.; Qin, J.; Chen, H.; Xiang, X.; Li, C.; Chen, R. Image Augmentation-Based Food Recognition with Convolutional Neural Networks. Comput. Mater. Continua 2019, 59, 297–313. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Meanings |
|---|---|
| B | The number of MEC-BSs |
| V | The number of VT |
| M | The number of tasks |
| The set of MEC-BSs, | |
| The set of VT, | |
| The set of Tasks, | |
| Tasks load of m | |
| Input data size of m | |
| Received result size of m | |
| Maximum tolerance time of m | |
| A | Computation offloading decision |
| Power of m in transmit | |
| Channel gain of m | |
| The power of the channel noise | |
| W | Bandwidth channel |
| Transmit rate of m | |
| The generation probability of m | |
| Local computational capability | |
| MEC-BS computational capability | |
| MEC-BS availability | |
| Local/transmission/MEC-BS time | |
| Local/ transmission/MEC-BS energy consumption | |
| Local/MEC-BS energy-efficiency cost | |
| The weight of energy consumption/time/penalty in offloading for m |
| Models | MAE | RMSE |
|---|---|---|
| 0.6624 | 0.8800 | |
| 0.5616 | 0.8002 | |
| 0.5088 | 0.7251 | |
| 0.4363 | 0.7033 | |
| 0.4070 | 0.6678 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, C.; Zhao, M.; Wong, K. An LSTM-Method-Based Availability Prediction for Optimized Offloading in Mobile Edges. Sensors 2019, 19, 4467. https://doi.org/10.3390/s19204467
Cui C, Zhao M, Wong K. An LSTM-Method-Based Availability Prediction for Optimized Offloading in Mobile Edges. Sensors. 2019; 19(20):4467. https://doi.org/10.3390/s19204467
Chicago/Turabian StyleCui, Chaoxiong, Ming Zhao, and Kelvin Wong. 2019. "An LSTM-Method-Based Availability Prediction for Optimized Offloading in Mobile Edges" Sensors 19, no. 20: 4467. https://doi.org/10.3390/s19204467
APA StyleCui, C., Zhao, M., & Wong, K. (2019). An LSTM-Method-Based Availability Prediction for Optimized Offloading in Mobile Edges. Sensors, 19(20), 4467. https://doi.org/10.3390/s19204467