Mobile Phone Passive Positioning through the Detection of Uplink Signals for Search and Rescue


Abstract
:1. Introduction
- A passive positioning method to locate 4G mobile phones by detecting uplink signals is developed, which can be utilized to quickly locate people buried in shallow ruins across a wide area for SAR missions.
- An analysis of the random access process and an introduction to the positioning model are given. According to the analysis, the signal detection procedure is presented and implemented with FPGA.
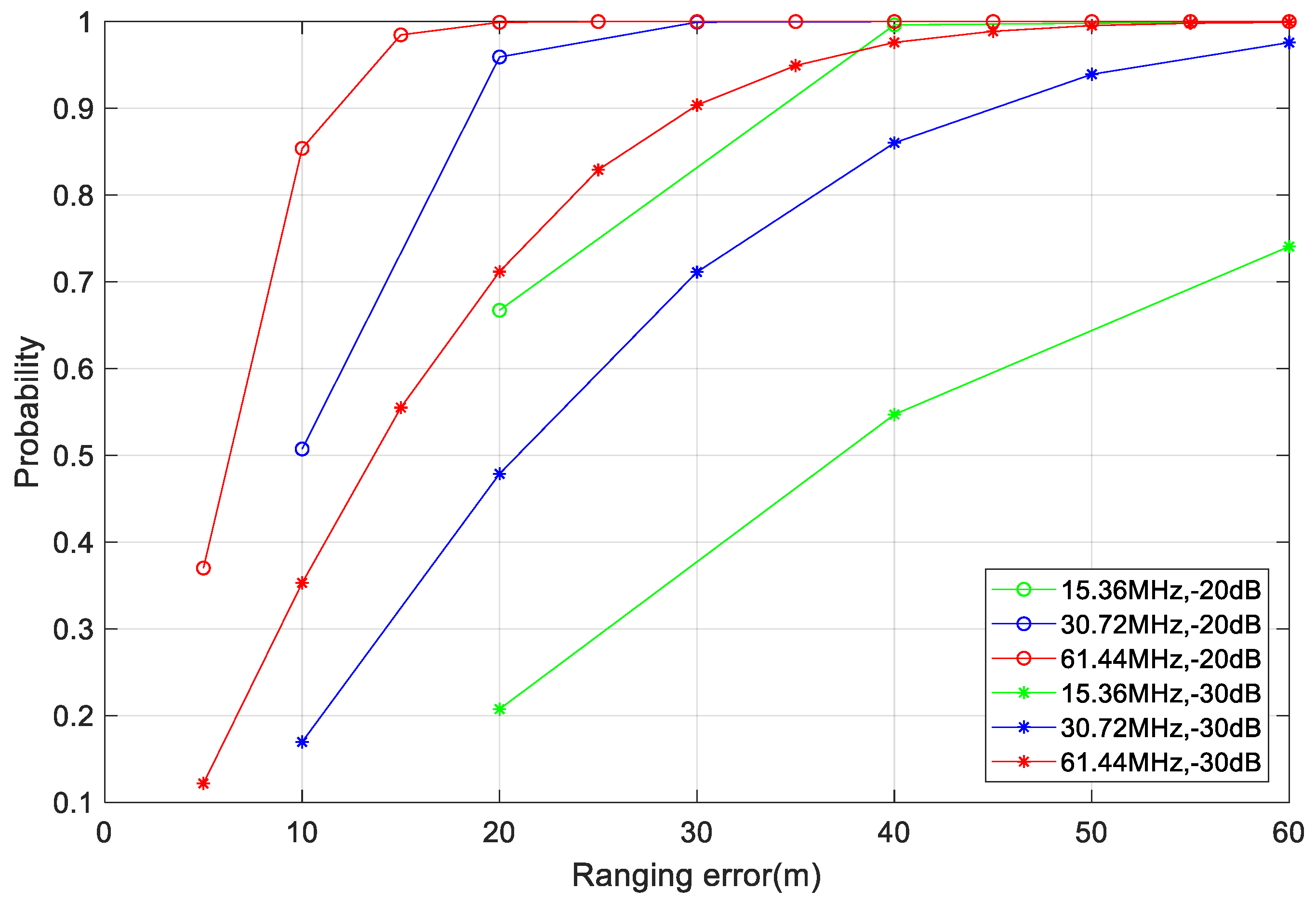
- Simulation and analysis of the detection procedure are conducted and the results show that the positioning method is feasible and has high detection accuracy in high-noise conditions in the post-disaster environment.
2. Random Access
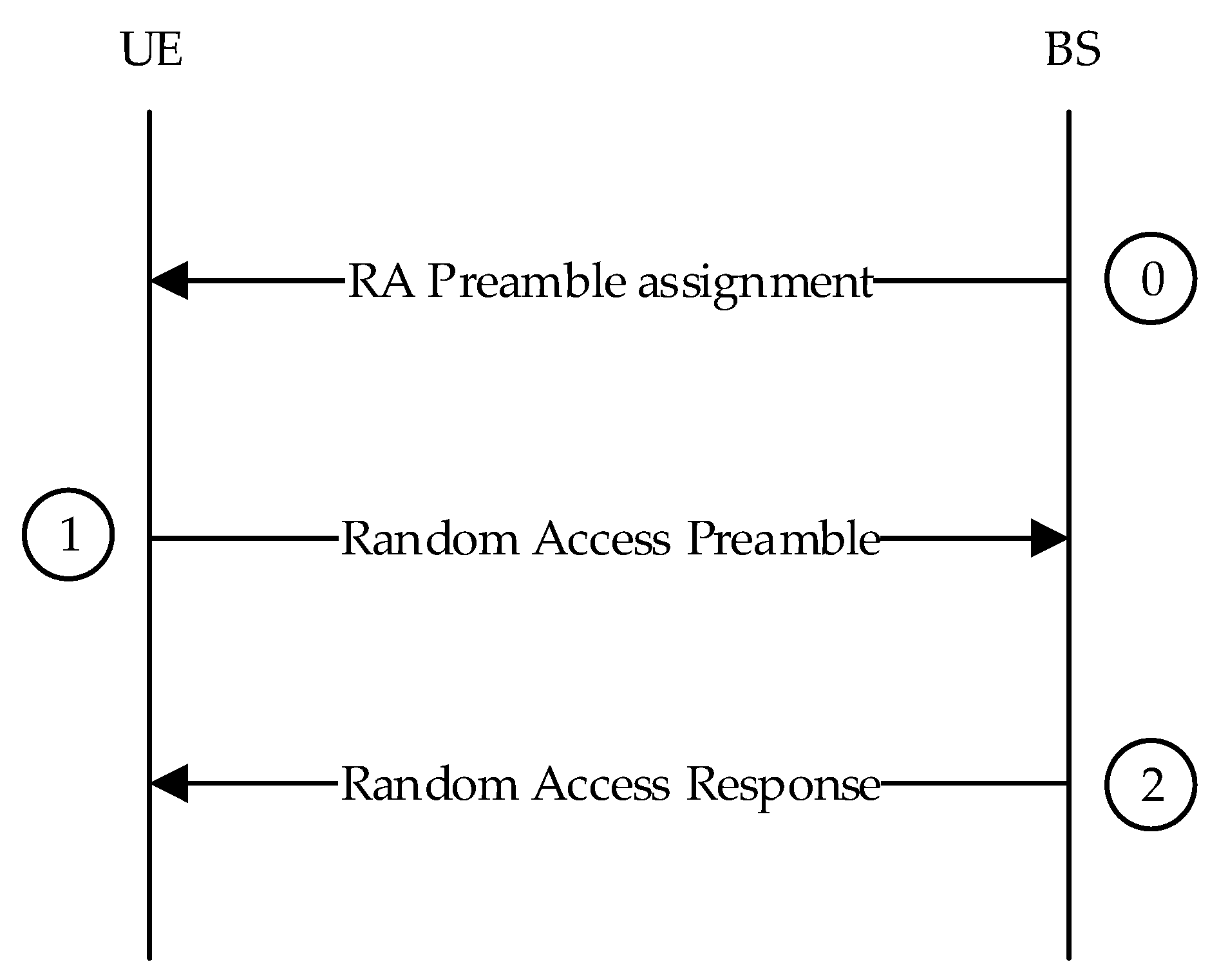
2.1. Random Access Procedure
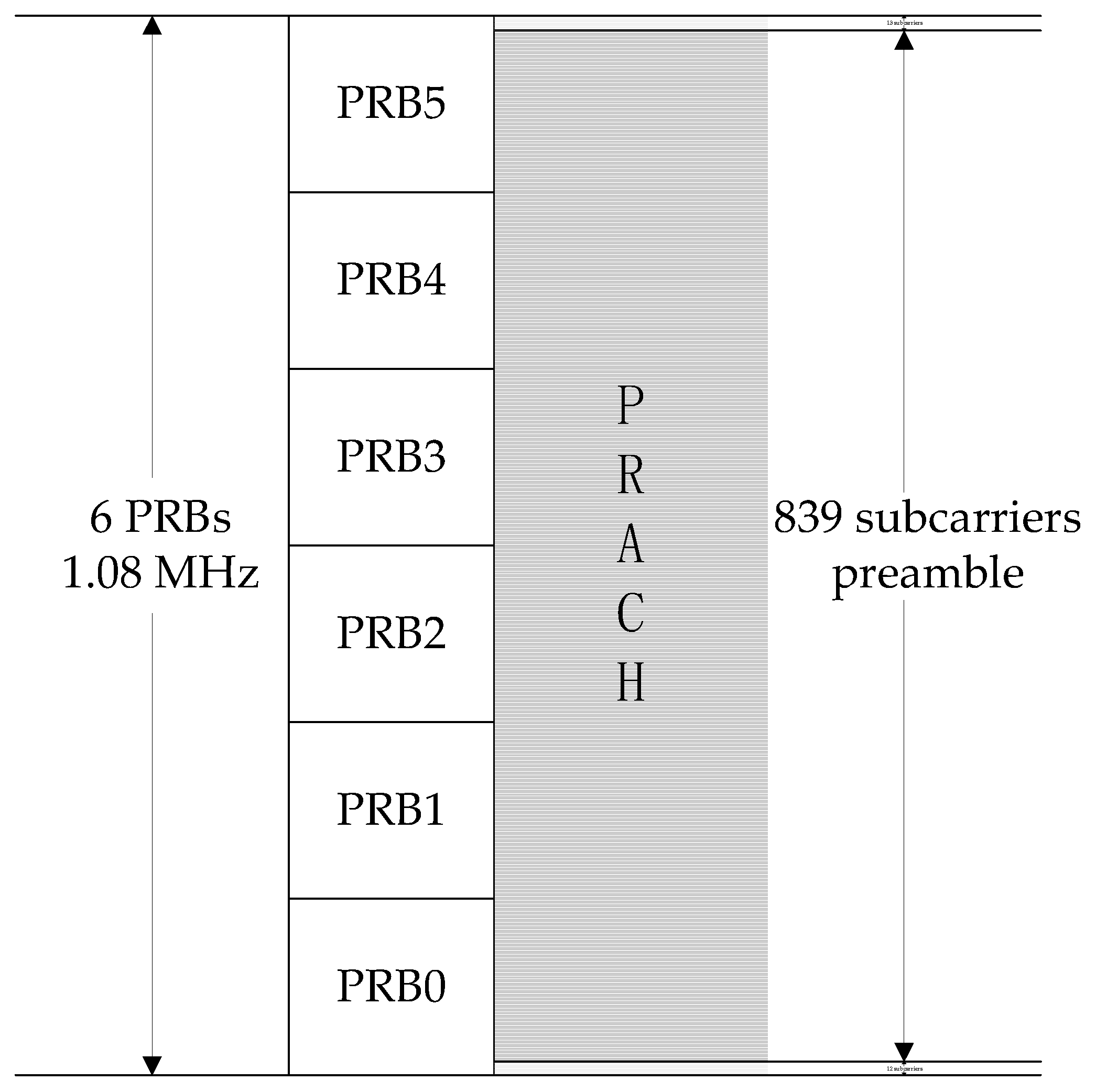
2.2. Random Access Preamble
3. Positioning Method and Signal Detection
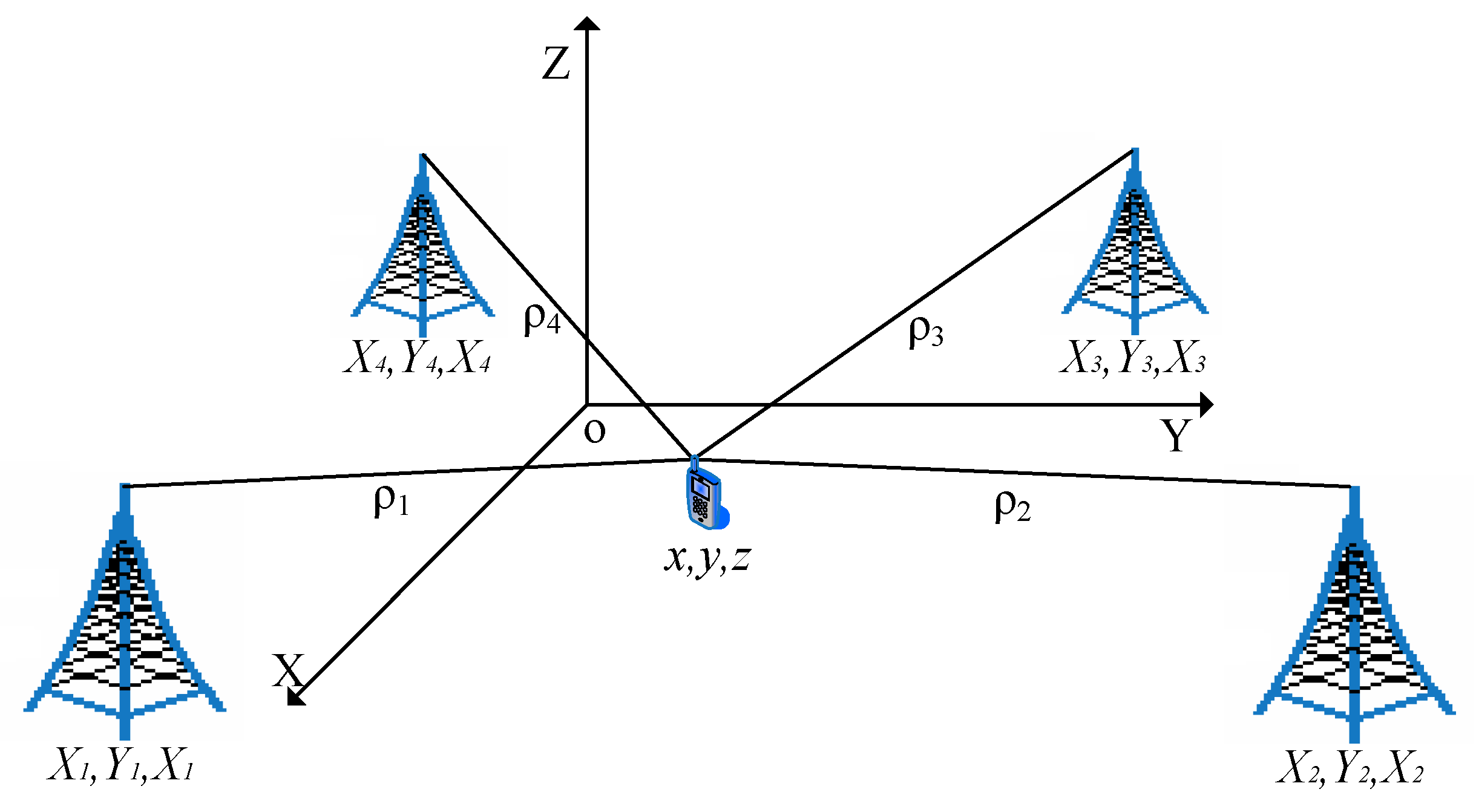
3.1. Positioning Method
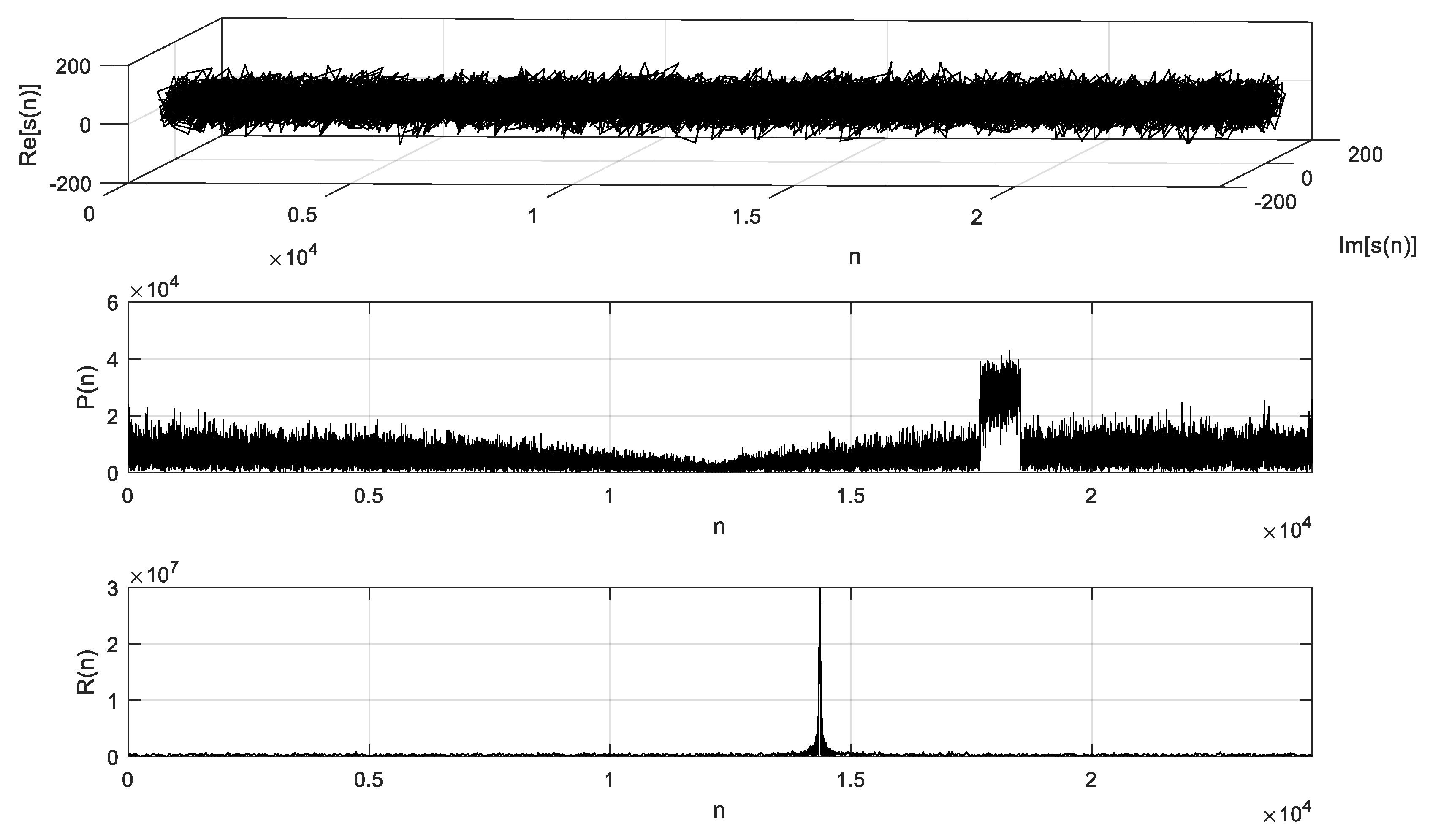
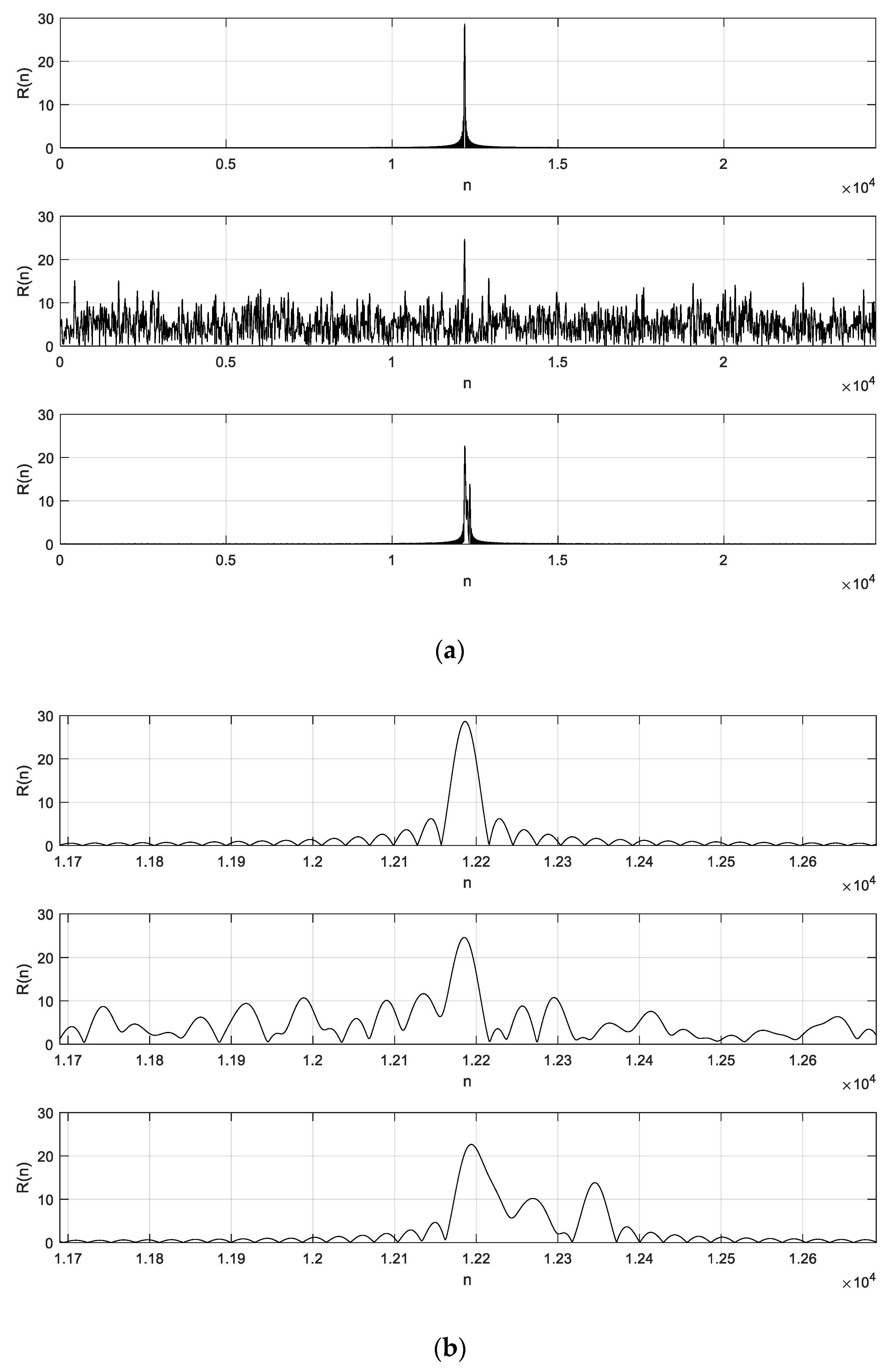
3.2. Preamble Detection
| Algorithm 1 Preamble detection for positioning |
| 1: Procedure Pdfp(s, Xu, threadhold, k, N) |
| 2: S←FFT(s) |
| 3: S’(n)←S(n + k) n = 1,2…,839 |
| 4: p(n)←S’(n) × Xu∗(n) n = 1,2…,839 |
| 5: r←IFFP(p, 1024) |
| 6: if max(r) > threadhold then |
| 7: r←IFFP(p, N) |
| 8: for n←1 to N do |
| 9: if |
| 10: out←[n,r(n)] |
| 11: end if |
| 12: end for |
| 13: return out |
| 14: end if |
| 15: end procedure |
4. Experiment and Simulation
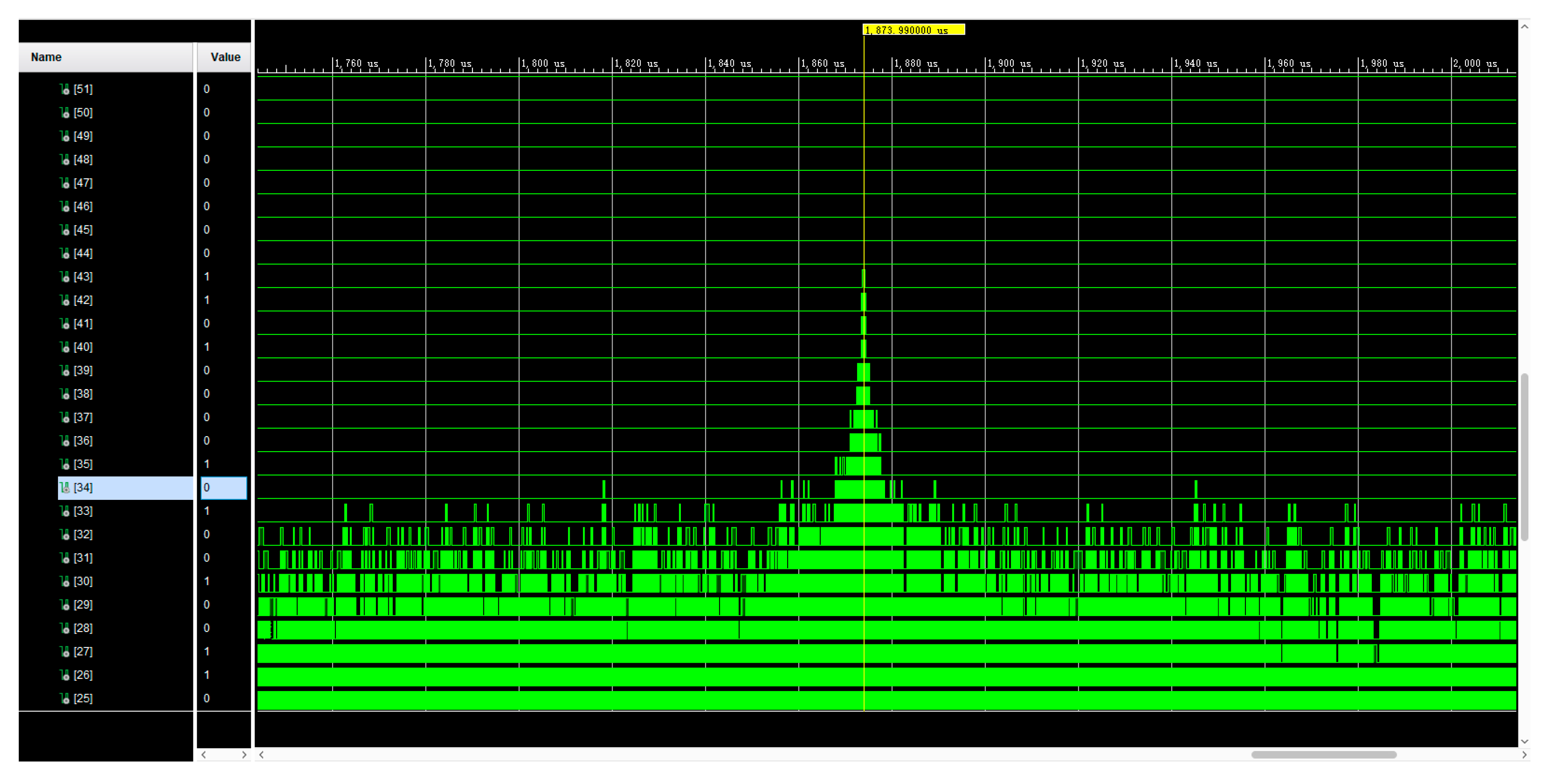
4.1. Preamble Detection Experiment
4.2. Preamble Correlation
4.2.1. Single Preamble Correlation
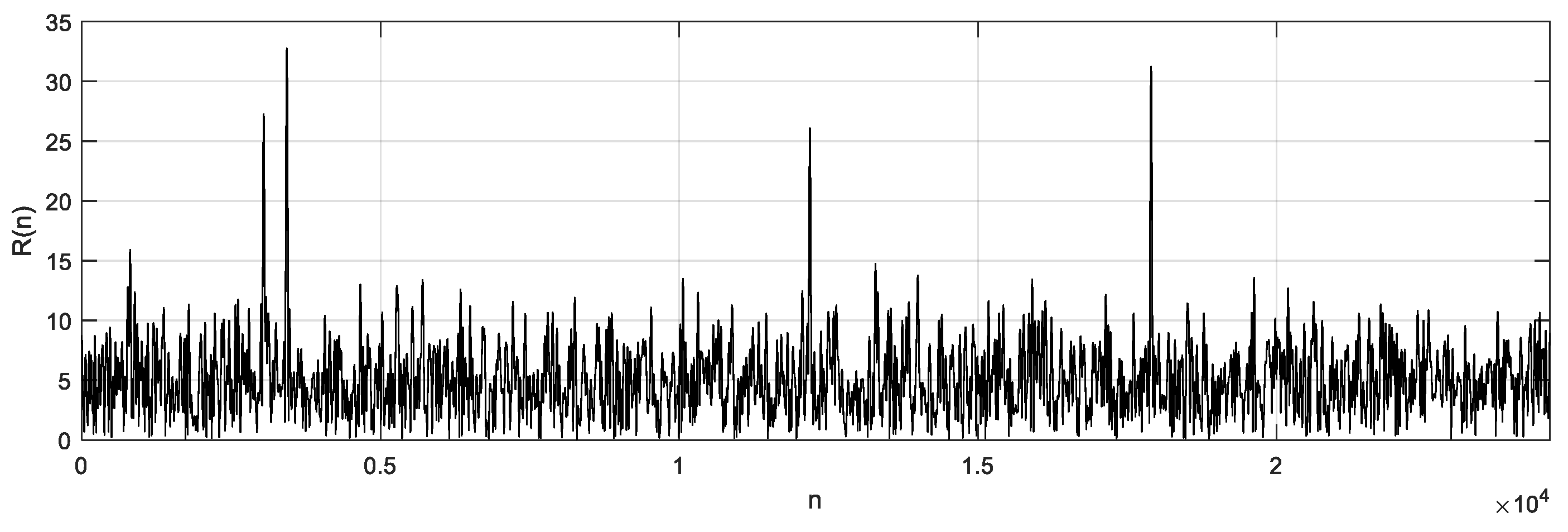
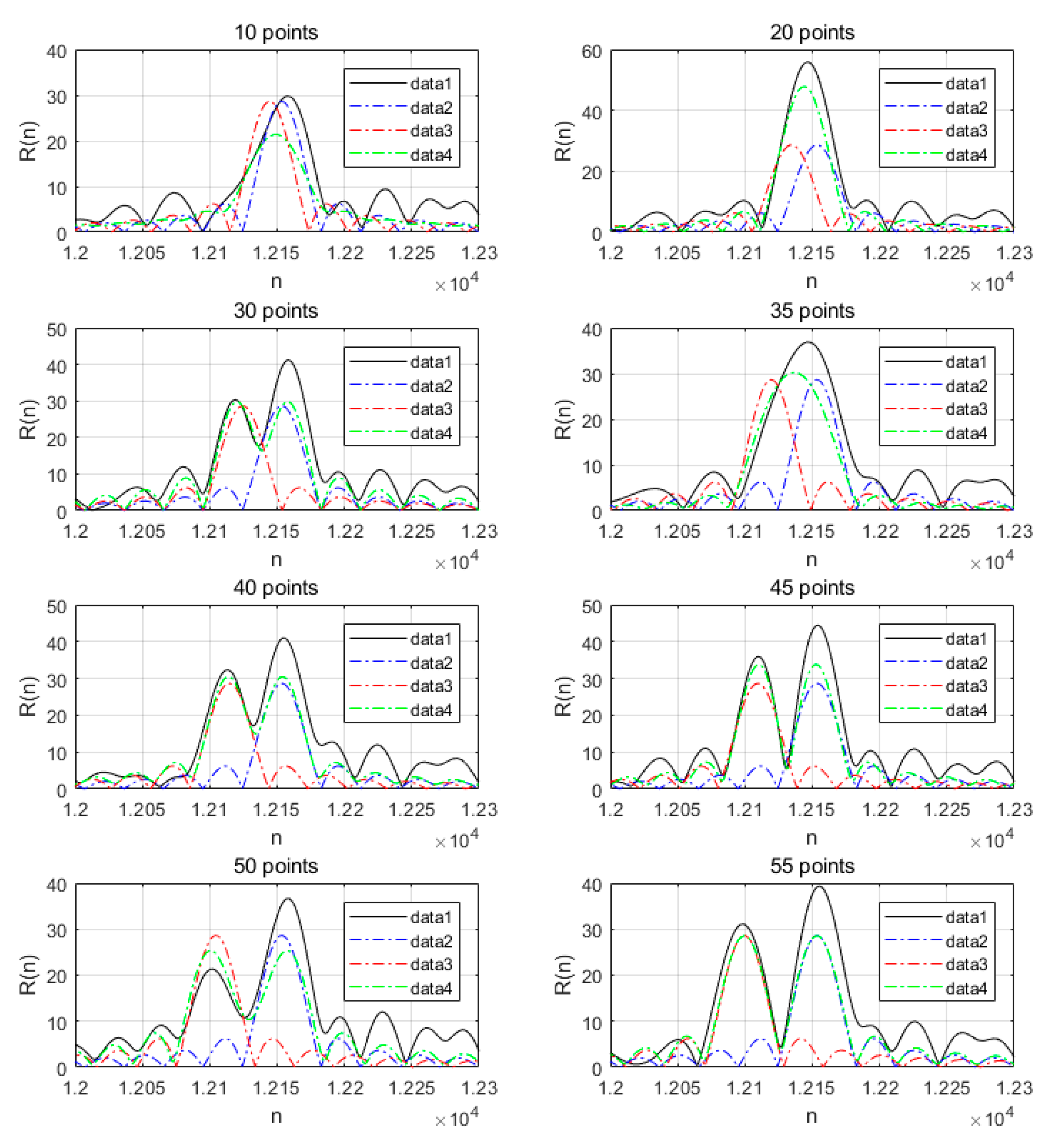
4.2.2. Multiple Preamble Correlation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Camara, D. Cavalry to the Rescue: Drones Fleet to Help Rescuers Operations over Disasters Scenarios. In 2014 IEEE Conference on Antenna Measurements & Applications (CAMA); IEEE: Antibes Juan-les-Pins, France, 2014; pp. 1–4. [Google Scholar]
- Bevacqua, G.; Cacace, J.; Finzi, A.; Lippiello, V. Mixed-Initiative Planning and Execution for Multiple Drones in Search and Rescue Missions. In Proceedings of the International Conference on Automated Planning and Scheduling; Twenty-Fifth International Conference on Automated Planning and Scheduling, Jerusalem, Israel, 7–11 June 2015; pp. 315–323. [Google Scholar]
- Lygouras, E.; Santavas, N.; Taitzoglou, A.; Tarchanidis, K.; Mitropoulos, A.; Gasteratos, A. Unsupervised Human Detection with an Embedded Vision System on a Fully Autonomous UAV for Search and Rescue Operations. Sensors 2019, 19, 3542. [Google Scholar] [CrossRef] [PubMed]
- Alotaibi, E.T.; Alqefari, S.S.; Koubaa, A. LSAR: Multi-UAV Collaboration for Search and Rescue Missions. IEEE Access 2019, 7, 55817–55832. [Google Scholar] [CrossRef]
- Maruyama, H.; Ito, K. Semi-Autonomous Snake-like Robot for Search and Rescue. In Proceedings of the 2010 IEEE Safety Security and Rescue Robotics, Bremen, Germany, 26–30 July 2010; pp. 1–6. [Google Scholar]
- Ventura, R.; Lima, P.U. Search and Rescue Robots: The Civil Protection Teams of the Future. In Proceedings of the 2012 Third International Conference on Emerging Security Technologies, Lisbon, Portugal, 5–7 September 2012; pp. 12–19. [Google Scholar]
- Zhao, J.; Gao, J.; Zhao, F.; Liu, Y. A Search-and-Rescue Robot System for Remotely Sensing the Underground Coal Mine Environment. Sensors 2017, 17, 2426. [Google Scholar] [CrossRef] [PubMed]
- Jorge, V.; Granada, R.; Maidana, R.; Jurak, D.; Heck, G.; Negreiros, A.; dos Santos, D.; Gonçalves, L.; Amory, A. A Survey on Unmanned Surface Vehicles for Disaster Robotics: Main Challenges and Directions. Sensors 2019, 19, 702. [Google Scholar] [CrossRef] [PubMed]
- Reed, J.H.; Krizman, K.J.; Woerner, B.D.; Rappaport, T.S. An Overview of the Challenges and Progress in Meeting the E-911 Requirement for Location Service. IEEE Commun. Mag. 1998, 36, 30–37. [Google Scholar] [CrossRef]
- Wang, S.S.; Green, M.; Malkawa, M. E-911 Location Standards and Location Commercial Services. In Proceedings of the 2000 IEEE Emerging Technologies Symposium on Broadband, Wireless Internet Access; Digest of Papers (Cat. No.00EX414), Richardson, TX, USA, 10–11 April 2000; p. 5. [Google Scholar]
- Zorn, S.; Rose, R.; Goetz, A.; Weigel, R. A Novel Technique for Mobile Phone Localization for Search and Rescue Applications. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–4. [Google Scholar]
- Goetz, A.; Zorn, S.; Rose, R.; Fischer, G.; Weigel, R. A Time Difference of Arrival System Architecture for GSM Mobile Phone Localization in Search and Rescue Scenarios. In Proceedings of the 2011 8th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 7–8 April 2011; pp. 24–27. [Google Scholar]
- Technical Specification Group Radio Access Network; Evolved Universal Terrestrial Radio Access (E-UTRA); LTE Positioning Protocol (LPP), Document 3GPP TS 36.355 V15.3.0, Mar. 2019. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2441 (accessed on 27 September 2019).
- Technical Specification Group Radio Access Network; NG-RAN; NR Positioning Protocol A (NRPPa), Document 3GPP TS 38.455 V15.2.1 Jan. 2019. Available online: https://portal.3gpp.org/desktopmodules/ Specifications/SpecificationDetails.aspx?specificationId=3256 (accessed on 27 September 2019).
- Kangas, A.; Siomina, I.; Wigren, T. Positioning in Lte. In Position Location: Theory, Practice and Advances; Zekavat, S.A., Buehrer, R.M., Eds.; IEEE Press Series on Digital & Mobile Communication; Wiley-IEEE Press: Hoboken, NJ, USA, 2012; Chapter 32; pp. 1081–1127. [Google Scholar]
- Gao, Y.; Deng, Z.; Zhang, Y.; Sun, S.; Li, Z. Mobile Phone Passive Positioning Through the Detection of Uplink Signal. In Proceedings of the 2019 IEEE International Conference on Smart Internet of Things (IEEE SmartIoT 2019), Tianjin, China, 9–11 August 2019; pp. 1–5. [Google Scholar]
- Technical Specification Group Radio Access Network; Evolved Universal Terrestrial Radio Access (E-UTRA) and Evolved Universal Terrestrial Radio Access Network (E-UTRAN); Overall description; Stage 2, Document 3GPP TS 36.300 V15.5.0, Mar. 2019. Available online: https://portal.3gpp.org/desktopmodules/ Specifications/SpecificationDetails.aspx?specificationId=2430 (accessed on 27 September 2019).
- Technical Specification Group Radio Access Network; NR; NR and NG-RAN Overall Description; Stage 2, Document 3GPP TS 38.300 V15.5.0, Mar. 2019. Available online: https://portal.3gpp.org/desktopmodules/ Specifications/SpecificationDetails.aspx?specificationId=3191 (accessed on 27 September 2019).
- Technical Specification Group Radio Access Network; E-UTRA; Physical Channels and Modulation, Document 3GPP TS 36.211 V15.5.0, Mar. 2019. Available online: https://portal.3gpp.org/desktopmodules/ Specifications/SpecificationDetails.aspx?specificationId=2425 (accessed on 27 September 2019).
- Technical Specification Group Radio Access Network; NR; Physical Channels and Modulation, Document 3GPP TS 38.211 V15.5.0, Mar. 2019. Available online: https://portal.3gpp.org/desktopmodules/ Specifications/SpecificationDetails.aspx?specificationId=3213 (accessed on 27 September 2019).
- Mardeni, R.; Shahabi, P.; Riahimanesh, M. Mobile Station Localization in Wireless Cellular Systems Using UTDOA. In Proceedings of the 2012 International Conference on Microwave and Millimeter Wave Technology (ICMMT), Shenzhen, China, 5–8 May 2012; pp. 1–4. [Google Scholar]
- McDermott, K.; Vaghefi, R.M.; Buehrer, R.M. Cooperative UTDOA Positioning in LTE Cellular Systems. In Proceedings of the 2015 IEEE Globecom Workshops (GC Wkshps), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Frame type | FDD |
| Bandwidth | |
| Uplink frequency | |
| Preamble format | |
| Root index | |
| PRACH configuration index | |
| value | |
| Logical root sequence number | |
| PRACH high speed | disable |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Deng, Z.; Zhang, Y.; Sun, S.; Li, Z. Mobile Phone Passive Positioning through the Detection of Uplink Signals for Search and Rescue. Sensors 2019, 19, 4526. https://doi.org/10.3390/s19204526
Gao Y, Deng Z, Zhang Y, Sun S, Li Z. Mobile Phone Passive Positioning through the Detection of Uplink Signals for Search and Rescue. Sensors. 2019; 19(20):4526. https://doi.org/10.3390/s19204526
Chicago/Turabian StyleGao, Yuhui, Zhongliang Deng, Yao Zhang, Shihua Sun, and Zhen Li. 2019. "Mobile Phone Passive Positioning through the Detection of Uplink Signals for Search and Rescue" Sensors 19, no. 20: 4526. https://doi.org/10.3390/s19204526
APA StyleGao, Y., Deng, Z., Zhang, Y., Sun, S., & Li, Z. (2019). Mobile Phone Passive Positioning through the Detection of Uplink Signals for Search and Rescue. Sensors, 19(20), 4526. https://doi.org/10.3390/s19204526