IKULDAS: An Improved kNN-Based UHF RFID Indoor Localization Algorithm for Directional Radiation Scenario

Abstract
:1. Introduction
2. Related Work
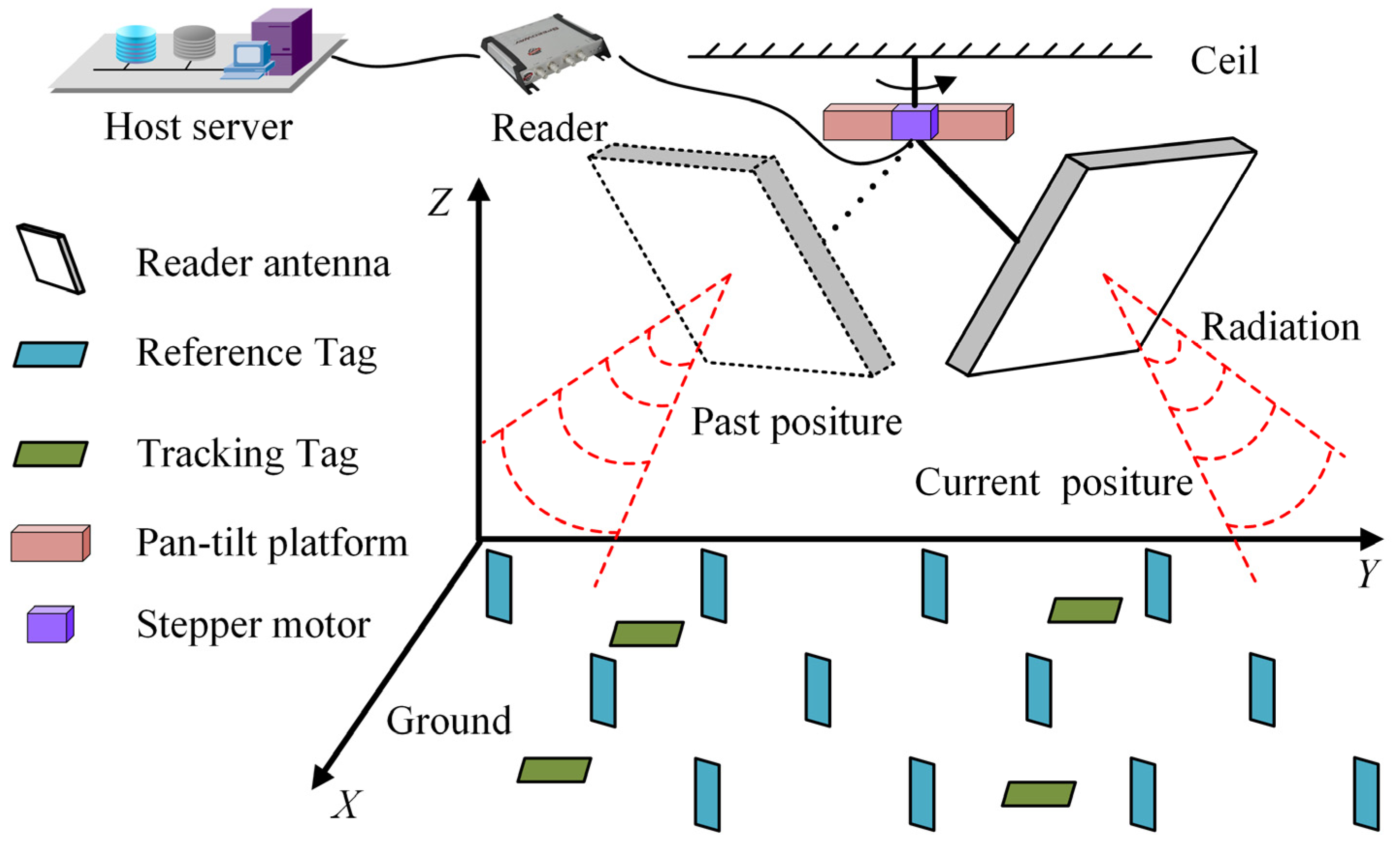
3. System Setup and RSSI Estimation
3.1. Estimation Frame Based on the FTE
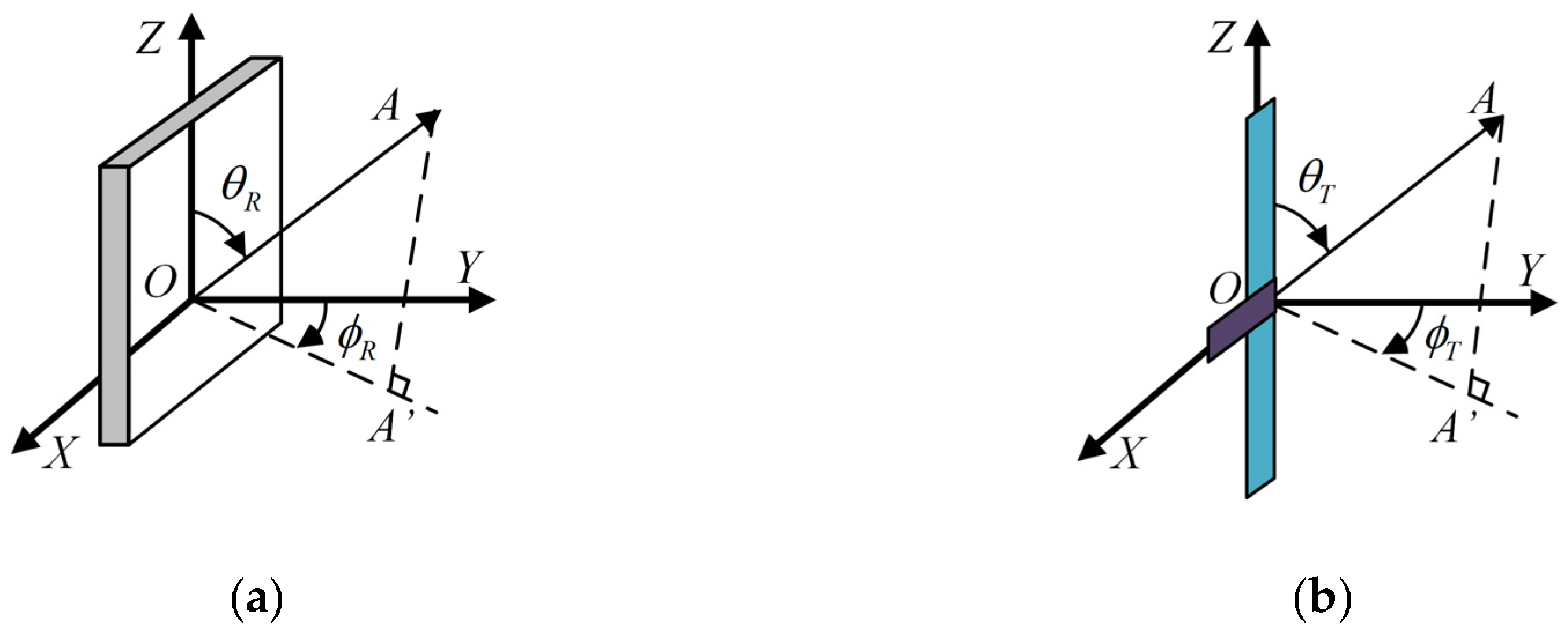
3.2. Fundamental Gain Features of Typical Antennas
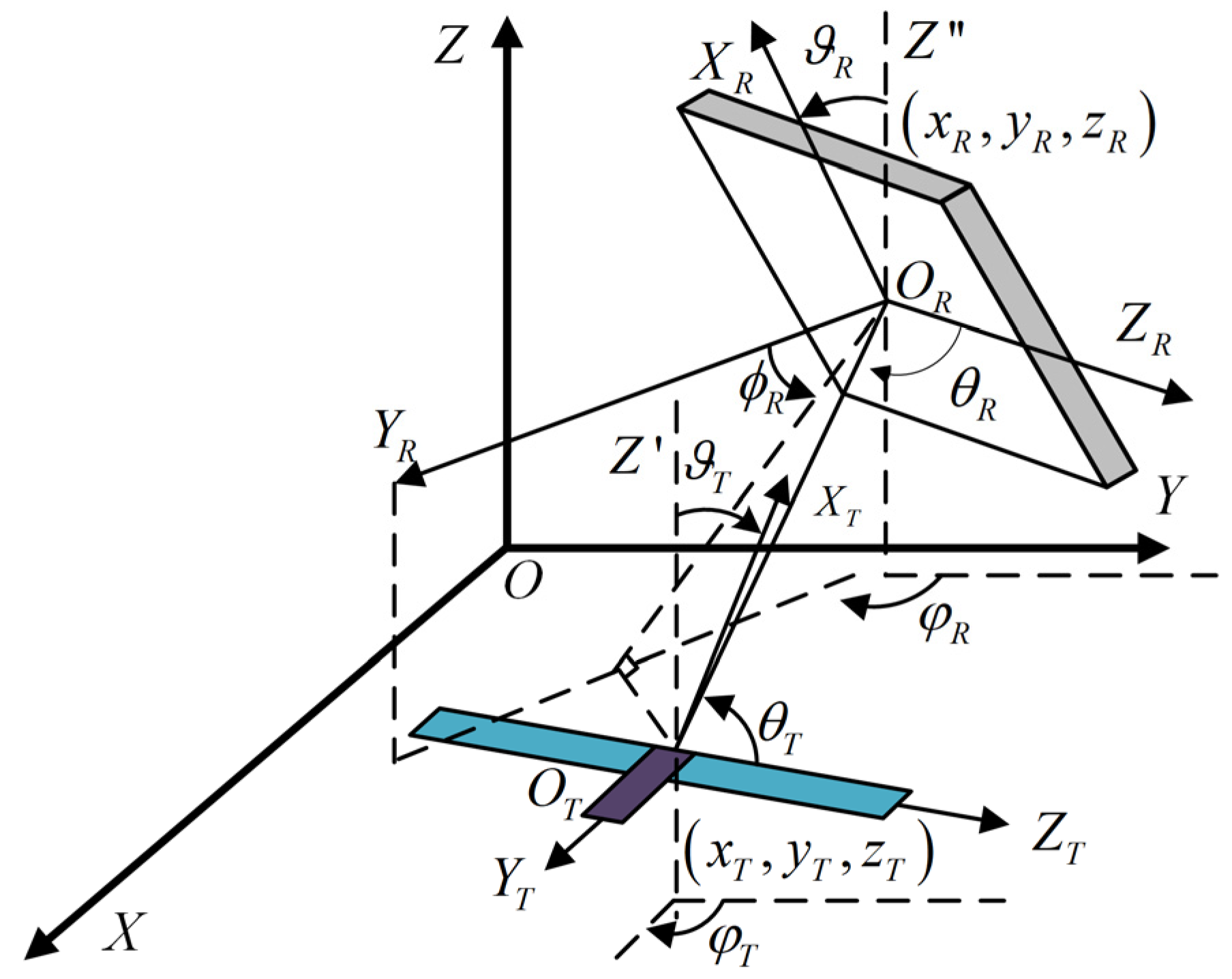
3.3. Gain Expressions Based on Position and Posture
4. Improved kNN-Based Algorithm
4.1. Selection of RSSI Measurement and NRT Based on OSFRA
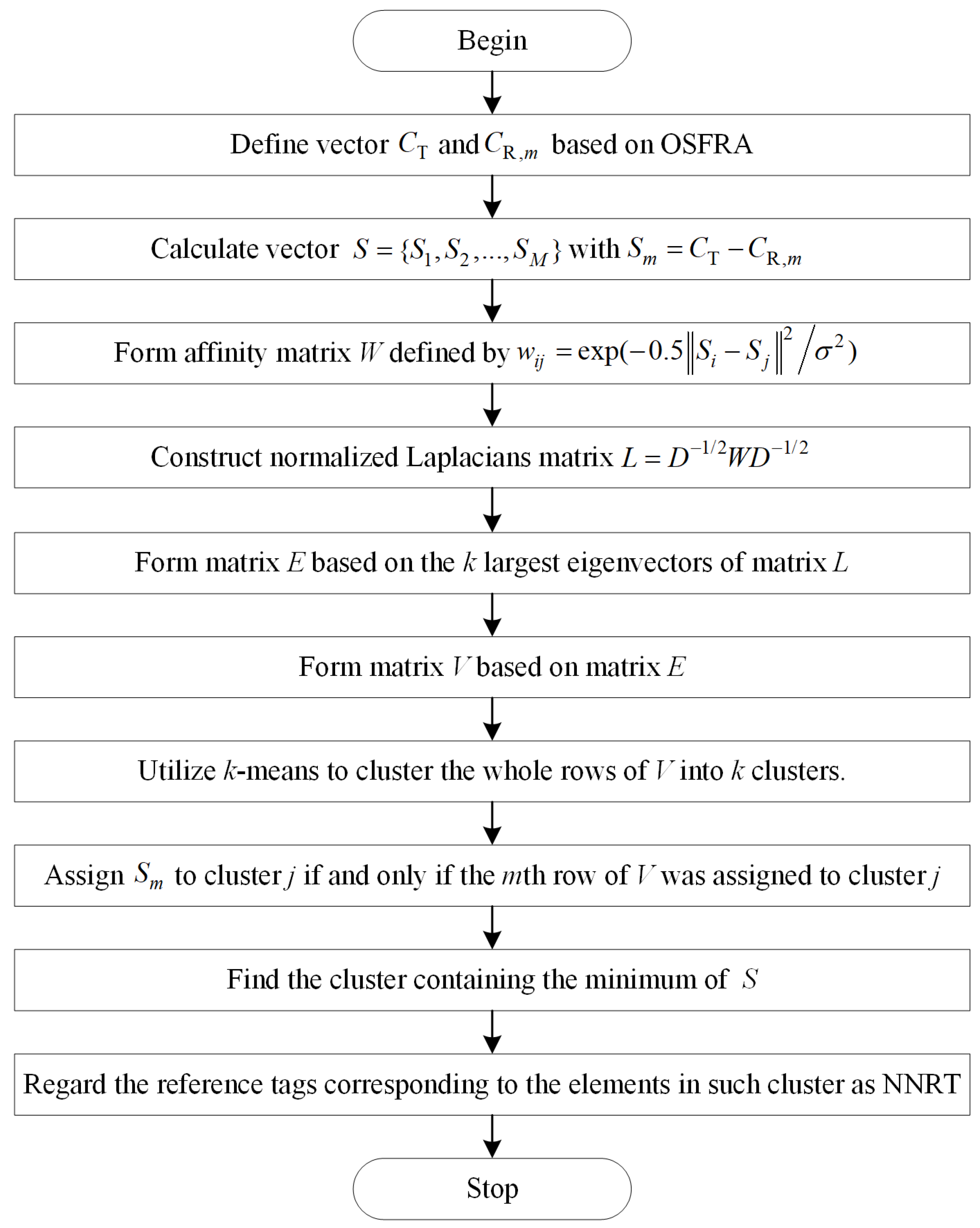
4.2. Determination of Nearest Neighbor Reference Tags Based on NJW
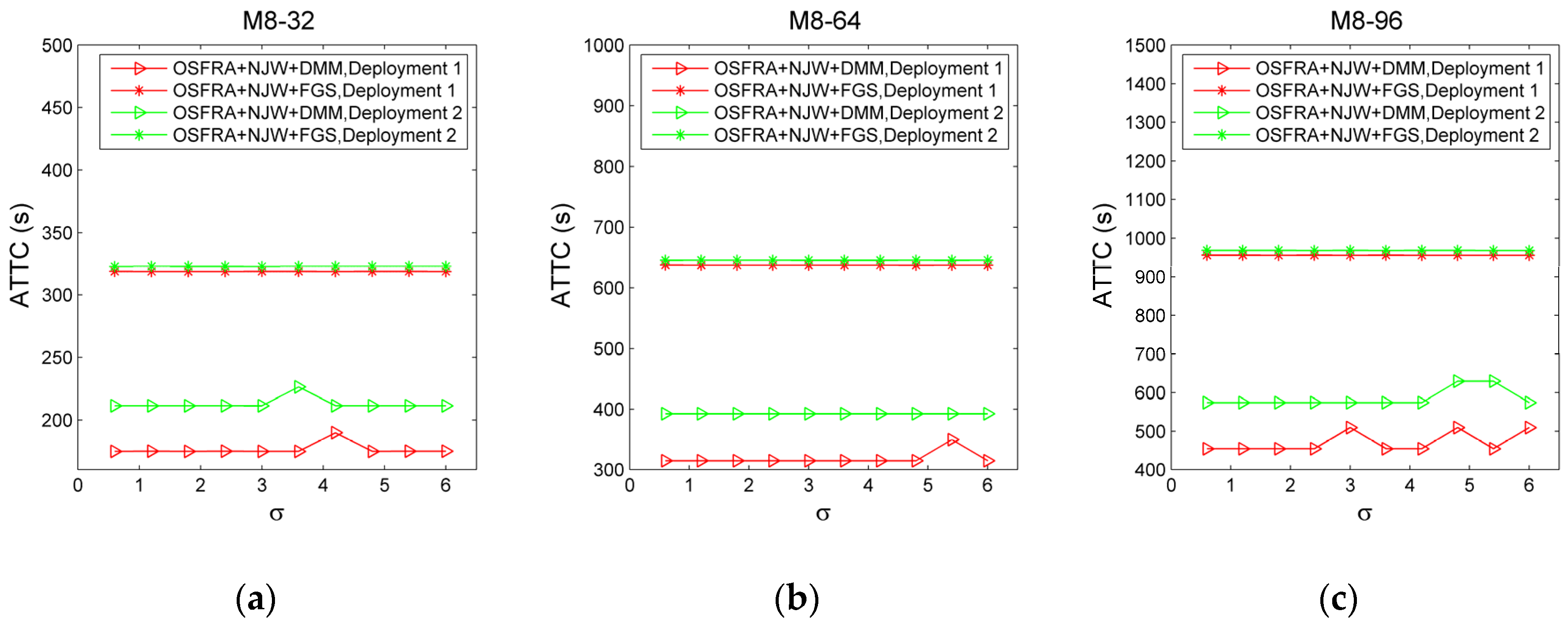
4.3. Acceleration of Tracking Based on DMM
5. Simulation and Analysis
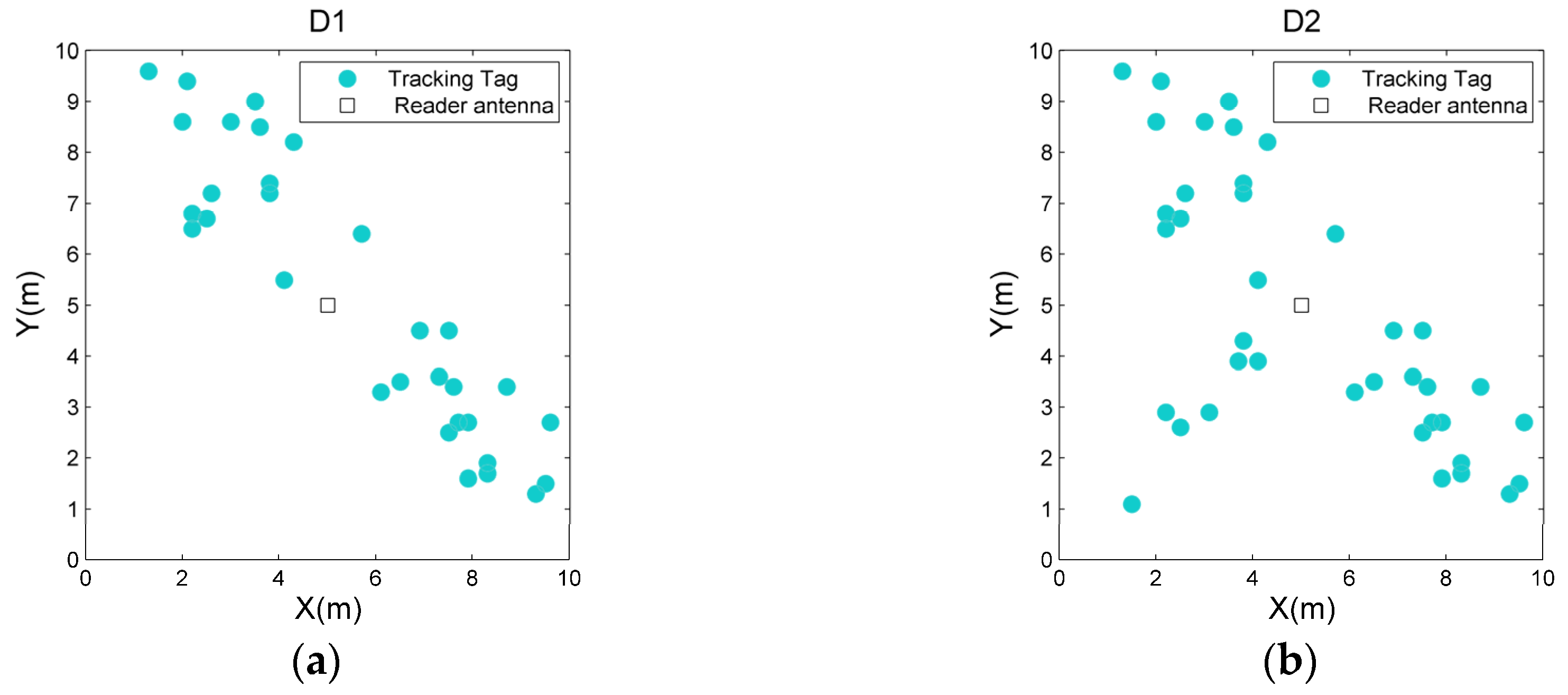
5.1. Simulations Setup
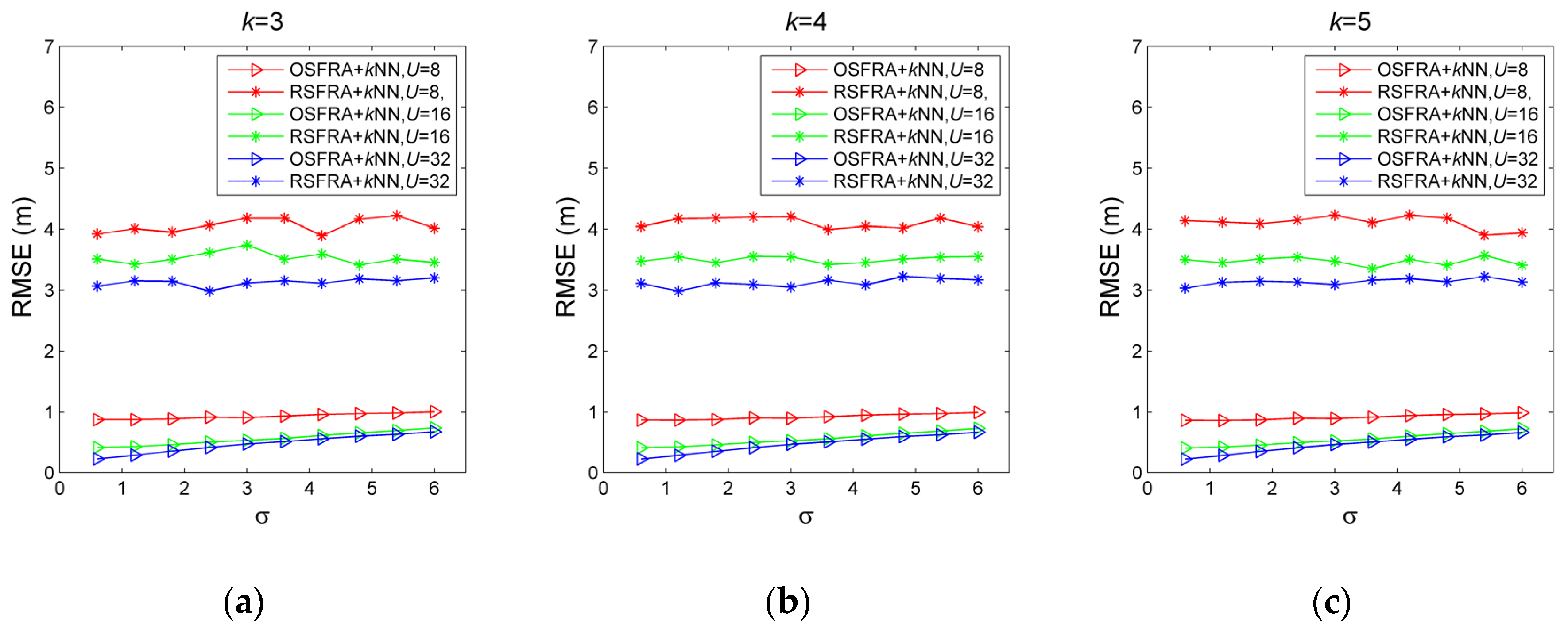
- OSFRA+kNN: It uses OSFRA to choose the RSSI measurement with superiority and NRT, and adopts kNN to estimate the positions of the tracking tags. The k values for kNN are set to 3, 4, and 5 for testing.
- RSFRA+kNN: It is similar to OSFRA+kNN except that the RSSI measurement and NRT are selected by a random single FRA.
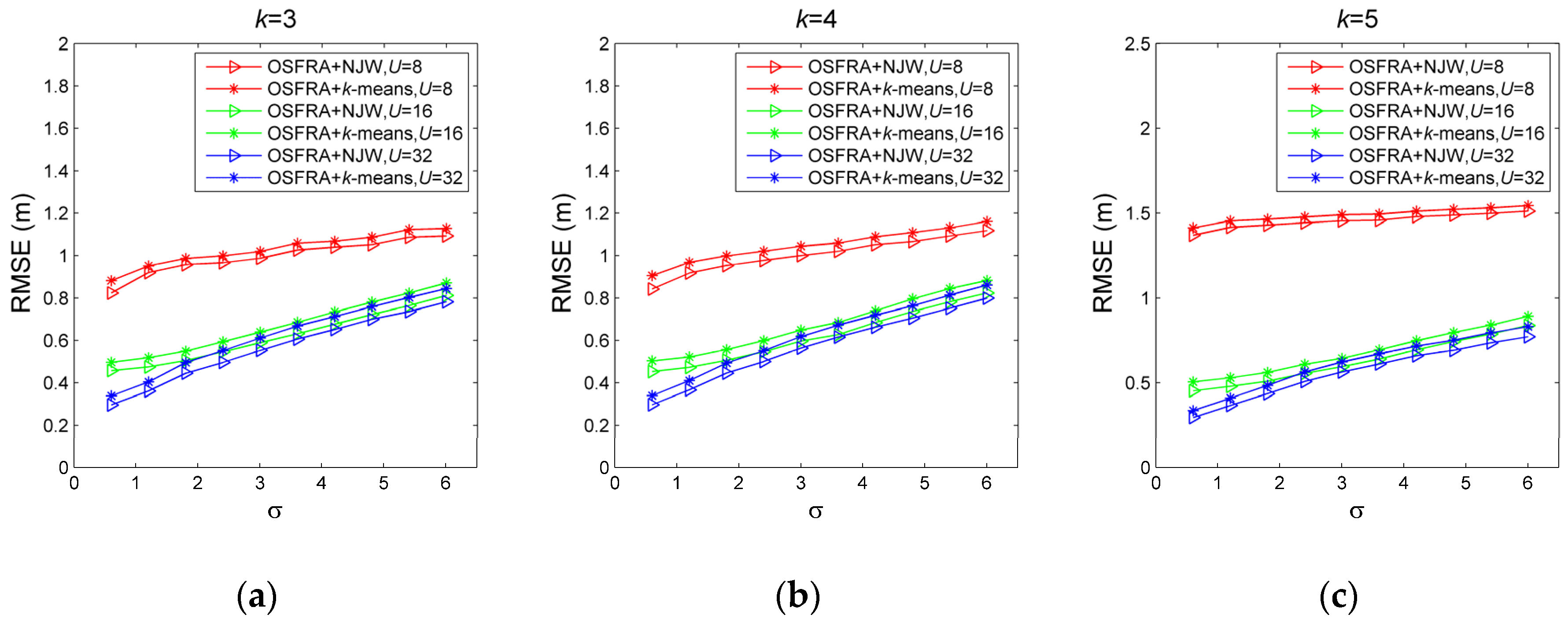
- OSFRA+k-means: The procedure is similar to of that of OSFRA+kNN. Whereas, the kNN algorithm is replaced by k-means clustering. The k values in k-means are set to 3, 4, and 5 for testing.
- OSFRA+NJW: NJW is leveraged to replace k-means algorithm in OSFRA+k-means.
- OSFRA+NJW+FGS: Based on OSFRA+NJW, it operates the reader antenna in a FGS mode.
- IKULDAS: It denotes the algorithm simultaneously utilizing the three strategies proposed.
5.2. Result and Comparisons
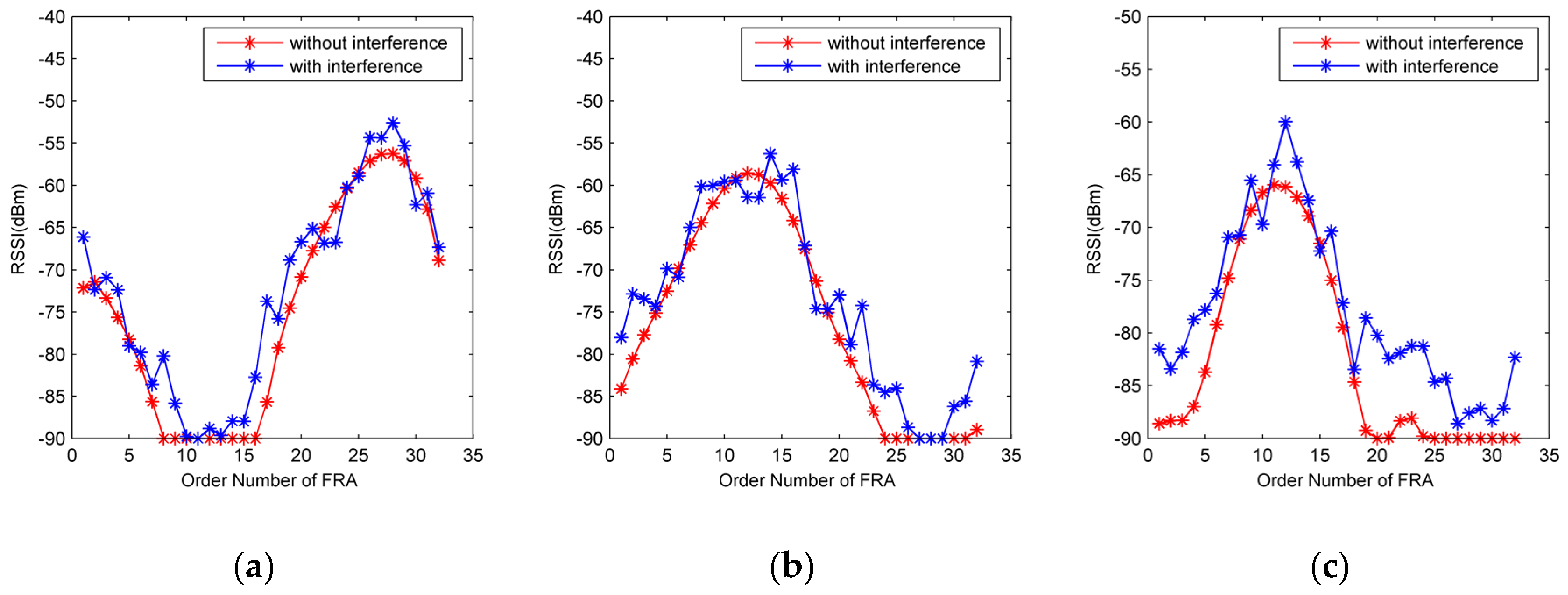
5.2.1. Effectiveness of OSFRA
5.2.2. Effectiveness of NJW-Based Algorithm
5.2.3. Effectiveness of DMM
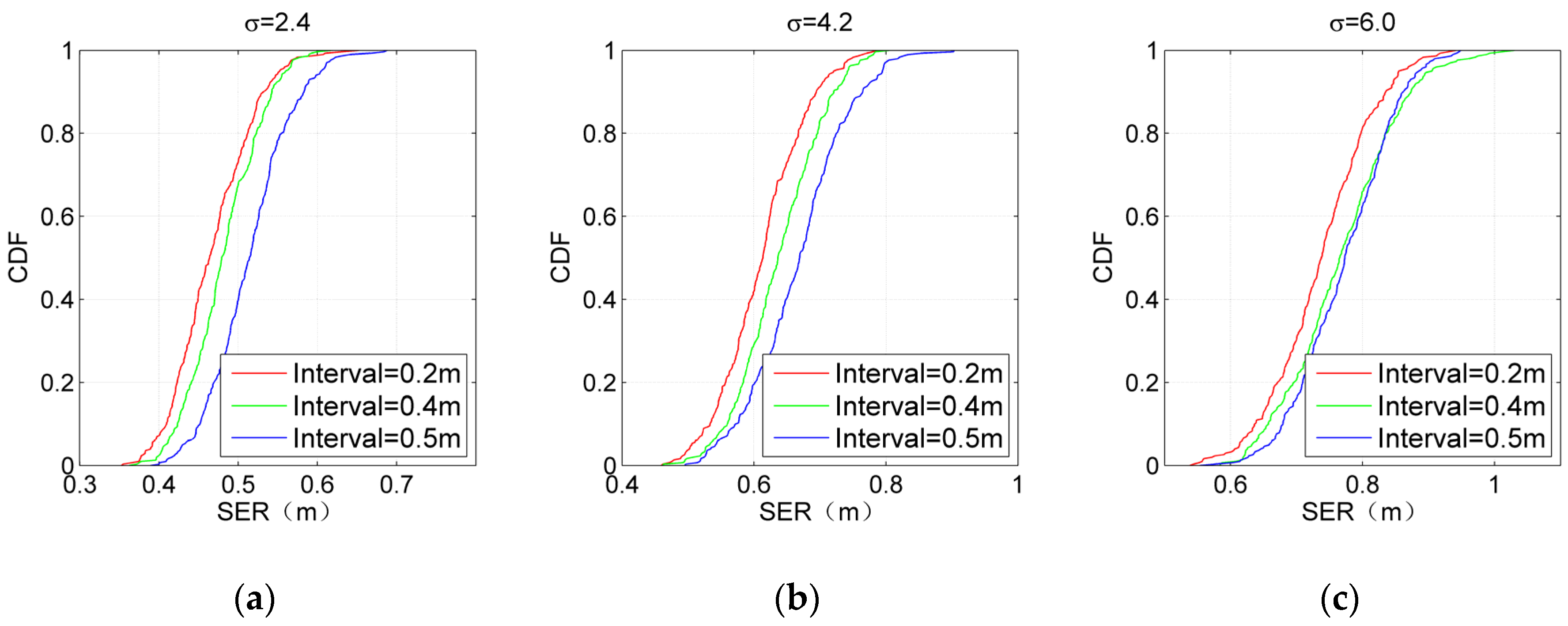
5.2.4. Performance of IKULDAS Under Various Conditions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Monte, J.G.D.D.; Yokoyana, R.S.; Villas, L.A. A low cost mHealth non-intrusive method to monitoring patient indoor Localization. IEEE Lat. Am. Trans. 2015, 13, 2668–2673. [Google Scholar] [CrossRef]
- Li, N.; Becerikgerber, B. Performance-based evaluation of RFID-based indoor location sensing solutions for the built environment. Adv. Eng. Inform. 2011, 25, 535–546. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Gunasekaran, M.; Mohamed, M. Internet of Things (IoT) and its Impact on supply chain: A framework for building smart, secure and efficient systems. Future Gener. Comput. Syst. 2018, 86, 614–628. [Google Scholar] [CrossRef]
- Mugahid, O.; Yun, T.G. Indoor distance estimation for passive UHF RFID tag based on RSSI and RCS. Measurement 2018, 127, 425–430. [Google Scholar] [CrossRef]
- Yang, D.; Xu, B.; Rao, K.; Sheng, W. Passive Infrared (PIR)-Based Indoor Position Tracking for Smart Homes Using Accessibility Maps and A-Star Algorithm. Sensors 2018, 18, 332. [Google Scholar] [CrossRef] [PubMed]
- Qi, J.; Liu, G. A Robust High-Accuracy Ultrasound Indoor Positioning System Based on a Wireless Sensor Network. Sensors 2017, 17, 2554. [Google Scholar] [CrossRef] [PubMed]
- Jiménez, A.R.; Seco, F.; Peltola, P.; Espinilla, M. Location of persons using binary sensors and BLE beacons for ambient assitive living. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Nantes, France, 24–27 September 2018. [Google Scholar]
- Jung, S.; Lee, G.; Han, D. Methods and Tools to Construct a Global Indoor Positioning System. IEEE Trans. Syst. Man Cybern. 2017, 48, 906–919. [Google Scholar] [CrossRef]
- Hanssens, B.; Plets, D.; Tanghe, E.; Oestges, C.; Gaillot, D.P.; Liénard, M.; Li, T.; Steendam, H.; Martens, L.; Joseph, W. An Indoor Variance-Based Localization Technique Utilizing the UWB Estimation of Geometrical Propagation Parameters. IEEE Trans. Antennas Propag. 2018, 66, 2522–2533. [Google Scholar] [CrossRef] [Green Version]
- Ruan, W.; Sheng, Q.Z.; Yao, L.; Li, X.; Falkner, N.J.; Yang, L. Device-free human localization and tracking with UHF passive RFID tags: A data-driven approach. J. Netw. Comput. Appl. 2017, 104, 78–96. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, B.; Pei, S.; Zhang, Y.; Zhang, S.; Yu, J. An Indoor Localization Method Based on AOA and PDOA Using Virtual Stations in Multipath and NLOS Environments for Passive UHF RFID. IEEE Access 2018, 6, 31772–31782. [Google Scholar] [CrossRef]
- Liu, T.; Yang, L.; Lin, Q.; Guo, Y.; Liu, Y. Anchor-free backscatter positioning for RFID tags with high accuracy. In Proceedings of the IEEE INFOCOM 2014, Toronto, ON, Canada, 27 April–2 May 2014. [Google Scholar]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Maneesilp, J.; Wang, C.; Wu, H.; Tzeng, N.F. RFID Support for Accurate 3D Localization. IEEE Trans. Comput. 2013, 62, 1447–1459. [Google Scholar] [CrossRef] [Green Version]
- Soonuk, S.; Eunkyu, L.; Wooseong, K. Indoor mobile object tracking using RFID. Future Gener. Comput. Syst. 2016, 76, 443–451. [Google Scholar] [CrossRef]
- Xu, H.; Ding, Y.; Li, P.; Wang, R.; Li, Y. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor. Sensors 2017, 17, 1806. [Google Scholar] [CrossRef] [PubMed]
- Hou, Z.-G.; Li, F.; Yao, Y. An Improved Indoor UHF RFID Localization Method Based on Deviation Correction. In Proceedings of the 4th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 21–23 July 2017. [Google Scholar]
- Zhao, Y.; Liu, K.; Ma, Y.; Li, Z. An improved k-NN algorithm for localization in multipath environments. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 208. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Chen, Y.; Li, X.Y.; Xiao, C.; Li, M.; Liu, Y. Tagoram: Real-Time Tracking of Mobile RFID Tags to High Precision Using COTS Devices. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014. [Google Scholar]
- Shangguan, L.; Yang, Z.; Liu, A.X.; Zhou, Z.; Liu, Y. STPP: Spatial-Temporal Phase Profiling-Based Method for Relative RFID Tag Localization. IEEE/ACM Trans. Netw. 2017, 25, 596–609. [Google Scholar] [CrossRef]
- Wang, Z.; Ye, N.; Malekian, R.; Xiao, F.; Wang, R. TrackT: Accurate tracking of RFID tags with mm-level accuracy using first-order taylor series approximation. Ad Hoc Netw. 2016, 13, 132–144. [Google Scholar] [CrossRef]
- Greene, E. Area of Operation for a Radio-Frequency Identification (RFID) Tag in the Far-Field. Ph.D. Thesis, Pittsburgh University, Pittsburgh, PA, USA, 2006. [Google Scholar]
- Ciftler, B.S.; Kadri, A.; Guvenc, I. IoT Localization for Bistatic Passive UHF RFID Systems with 3D Radiation Pattern. IEEE Internet Things J. 2017, 4, 905–916. [Google Scholar] [CrossRef]
- Shi, W.; Guo, Y.; Yan, S.; Yu, Y.; Luo, P.; Li, J. Optimizing Directional Reader Antennas Deployment in UHF RFID Localization System by Using a MPCSO Algorithm. IEEE Sens. J. 2018, 18, 5035–5048. [Google Scholar] [CrossRef]
- Huang, Y.; Lv, S.; Jun, W.; Jun, S. The topology analysis of reference tags of RFID indoor location system. In Proceedings of the IEEE International Conference on Digital Ecosystems and Technologies, Istanbul, France, 1–3 June 2009. [Google Scholar]
- Han, K.; Cho, S.H. Advanced LANDMARC with adaptive k-nearest algorithm for RFID location system. In Proceedings of the IEEE International Conference on Network Infrastructure and Digital Content, Beijing, China, 24–26 September 2010. [Google Scholar]
- Zhao, Y.; Liu, K.; Ma, Y.; Gao, Z.; Zang, Y.; Teng, J. Similarity Analysis based Indoor Localization Algorithm with Backscatter Information of Passive UHF RFID Tags. IEEE Sens. J. 2017, 17, 185–193. [Google Scholar] [CrossRef]
- Wang, Y.; Duan, X.; Liu, X.; Wang, C.; Li, Z. A spectral clustering method with semantic interpretation based on axiomatic fuzzy set theory. Appl. Soft. Comput. 2018, 64, 59–74. [Google Scholar] [CrossRef]
- Qiu, L.; Liang, X.; Huang, Z. PATL: A RFID Tag Localization based on Phased Array Antenna. Sci. Rep. 2017, 7, 44183. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, R.; Koch, A.; Zell, A. Path following with passive UHF RFID received signal strength in unknown environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012. [Google Scholar]
- Vorst, P.; Koch, A.; Zell, A. Efficient self-adjusting, similarity-based location fingerprinting with passive UHF RFID. In Proceedings of the IEEE International Conference on RFID-Technologies and Applications, Sitges, Spain, 15–16 September 2011. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. DeepFi: Deep Learning for Indoor Fingerprinting Using Channel State Information. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S. BiLoc: Bi-Modal Deep Learning for Indoor Localization with Commodity 5GHz WiFi. IEEE Access 2017, 5, 4209–4220. [Google Scholar] [CrossRef]
- Smartrac. Available online: https://www.smartrac-group.com/files/content/Products_Solutions/PDF/Passive%20RFID%20Sensors%20Technical%20Guide_AN-FAM-1601_web.pdf (accessed on 25 December 2018).
- Yu, C.; Zhou, F. A New Frame Size Adjusting Method for Framed Slotted Aloha Algorithm. In Proceedings of the 2009 IEEE International Conference on e-Business Engineering, Macau, China, 21–23 October 2009. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k | U = 8 | U = 16 | U = 32 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| I | |||||||||||
| σ | 3 | 4 | 5 | 3 | 4 | 5 | 3 | 4 | 5 | ||
| 0.6 | 6.66% | 7.69% | 3.03% | 7.69% | 9.91% | 10.25% | 12.34% | 12.45% | 12.11% | ||
| 1.2 | 3.38% | 8.22% | 2.64% | 8.22% | 9.28% | 9.32% | 10.29% | 10.38% | 10.29% | ||
| 1.8 | 3.00% | 7.95% | 2.38% | 7.95% | 9.03% | 9.16% | 10.05% | 9.52% | 9.67% | ||
| 2.4 | 3.33% | 7.97% | 2.32% | 7.97% | 8.64% | 8.79% | 9.96% | 9.14% | 9.78% | ||
| 3.0 | 3.23% | 7.73% | 2.40% | 7.73% | 7.94% | 7.69% | 9.39% | 8.80% | 9.26% | ||
| 3.6 | 3.21% | 7.81% | 2.37% | 7.81% | 8.34% | 7.91% | 9.17% | 8.70% | 8.80% | ||
| 4.2 | 2.73% | 7.81% | 2.11% | 7.81% | 7.40% | 7.17% | 8.44% | 8.18% | 7.85% | ||
| 4.8 | 3.25% | 7.41% | 2.21% | 7.41% | 7.47% | 6.71% | 7.78% | 8.36% | 7.84% | ||
| 5.4 | 3.22% | 7.13% | 2.09% | 7.13% | 7.33% | 6.18% | 8.17% | 8.27% | 7.42% | ||
| 6.0 | 3.11% | 6.73% | 2.10% | 6.73% | 6.57% | 6.07% | 7.25% | 7.78% | 7.11% | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, W.; Du, J.; Cao, X.; Yu, Y.; Cao, Y.; Yan, S.; Ni, C. IKULDAS: An Improved kNN-Based UHF RFID Indoor Localization Algorithm for Directional Radiation Scenario. Sensors 2019, 19, 968. https://doi.org/10.3390/s19040968
Shi W, Du J, Cao X, Yu Y, Cao Y, Yan S, Ni C. IKULDAS: An Improved kNN-Based UHF RFID Indoor Localization Algorithm for Directional Radiation Scenario. Sensors. 2019; 19(4):968. https://doi.org/10.3390/s19040968
Chicago/Turabian StyleShi, Weiguang, Jiangxia Du, Xiaowei Cao, Yang Yu, Yu Cao, Shuxia Yan, and Chunya Ni. 2019. "IKULDAS: An Improved kNN-Based UHF RFID Indoor Localization Algorithm for Directional Radiation Scenario" Sensors 19, no. 4: 968. https://doi.org/10.3390/s19040968
APA StyleShi, W., Du, J., Cao, X., Yu, Y., Cao, Y., Yan, S., & Ni, C. (2019). IKULDAS: An Improved kNN-Based UHF RFID Indoor Localization Algorithm for Directional Radiation Scenario. Sensors, 19(4), 968. https://doi.org/10.3390/s19040968