1. Introduction
Topographic analysis of concrete surfaces is usually aimed at improving the quality or increasing the durability of concrete elements and structures. The protection of concrete against corrosion may be achieved through the use of various surface treatment technologies and the modification of surface parameters [
1,
2]. The appropriate preparation of concrete surfaces is also important for the achieved shear strength of structural layers connected with the concrete. Common to design codes is the qualitative evaluation of the surface roughness of the concrete substrate. The bond strength at the interface between the concrete and soil layers is important to ensure the monolithic behavior of composite members. The Eurocode 2 standard [
3] classifies the roughness of a substrate surface as very smooth, smooth, and rough. This classification is clearly inaccurate, because it depends on a subjective assessment of the designer. Studies of the impact of the concrete surface treatment on its roughness and results of pull out tests are presented in [
4,
5,
6]. In the case of geotechnical structures implemented in subsoil subbases, the roughness of the concrete surfaces affects the durability and strength of the structures. However, detailed studies of the surfaces of geotechnical structures are rarely performed, because access to underground objects is usually very limited. A few exceptions include excavated diaphragm walls or surfaces of concrete dams from the downstream side. Usually, in addition to non-destructive material tests [
7], measurements of displacements using geodetic techniques [
8,
9] are performed in parallel.
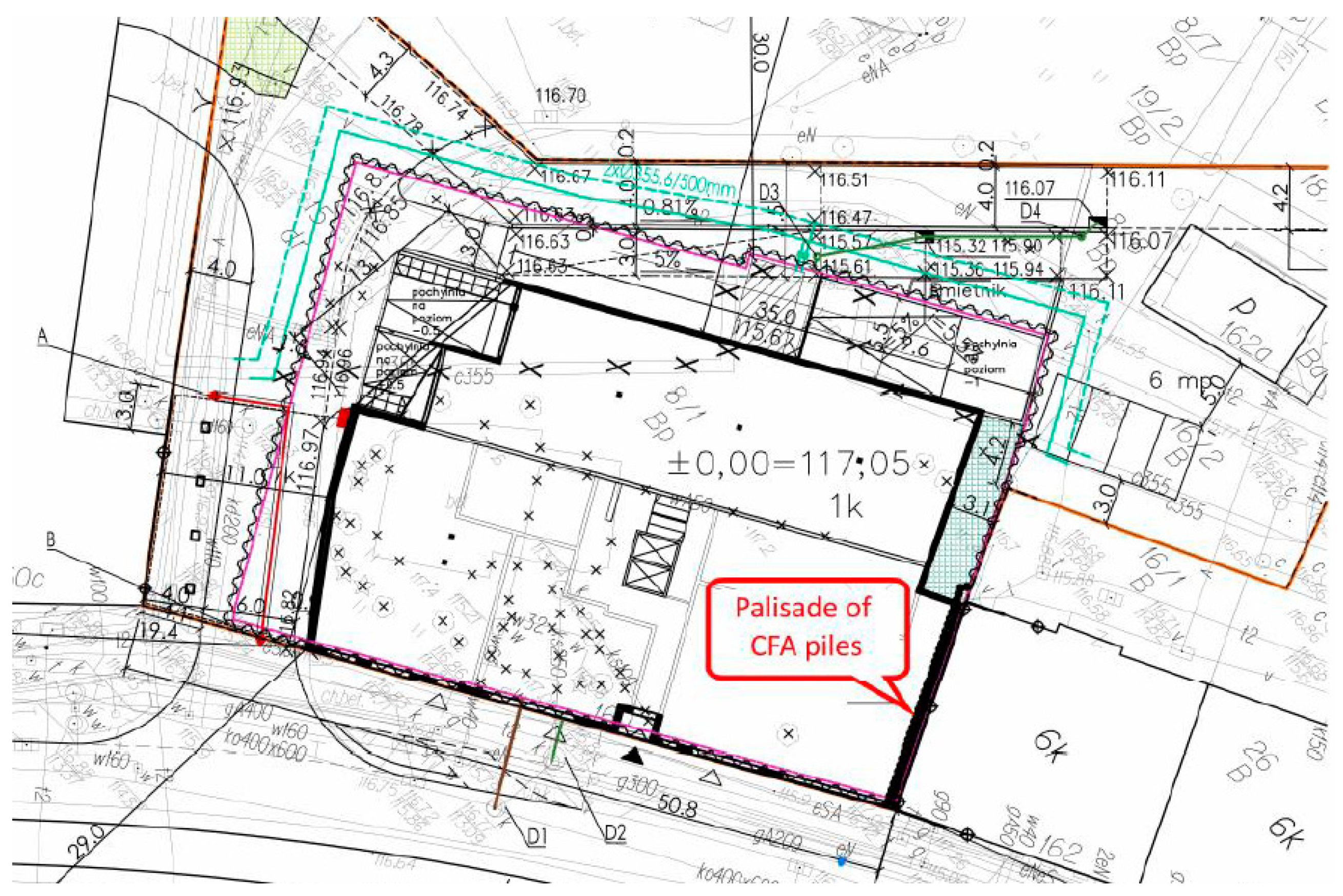
The technology of making continuous flight auger (CFA) piles affects the formation of the characteristic rough surface of the piles (
Figure 1, detail 4). Piling is a cast, in situ process that is very suited to soft ground where deep casings or the use of drilling support fluids might otherwise be needed. The most significant distinction from conventional bored piles is that CFA piles do not create an open excavation. The sides of the hole are supported at all times by the soil-filled auger, eliminating the need for temporary casing or bentonite slurry. The construction sequence of a CFA pile is as follows:
Drilling a full-length auger with a hollow stem (temporarily plugged) into the soil using a constant penetration rate;
After reaching the design toe, concrete is pumped through the hollow stem of the auger while the rotating auger is extracted at the same time. It is important that the auger always remains embedded in the concrete and that a positive concrete pressure is maintained throughout the placement of the concrete;
After completion of the concrete placement process, the reinforcement cage (
Figure 1, detail 2) is thrown into fluid concrete.
Quality control is critical in the construction of CFA piles. CFA drilling rigs feature built-in devices to monitor the volume of the concrete pumped as the auger is extracted. The following parameters are usually recorded: penetration/uplift per revolution, auger depth, concrete supply per increment of auger uplift during placement, and injection pressure at the auger head. Concrete for deep foundations must have excellent workability criteria and sufficient resistance against bleeding to guarantee a non-defective end-product. The pressure effects from the hydraulic head and the self-weight of the concrete mass on the fresh concrete at the base of deep foundations cause the risk of bleeding and associated stability and quality issues [
10].
In the case of concrete CFA piles, the roughness of their side surface also depends on the specific conditions of the ground base in which the piles were formed. At the same time, the surface parameters of the piles affect the shear strength between the concrete and the surrounding soil. The roughness of the pile shaft is of primary importance in the case of load transfer to the surrounding soil. The load transfer determines the stress state at the pile toe level and, consequently, the pile capacity and its settlement at the service load. Various aspects of this impact were analyzed by Baca [
11]. Furthermore, combinations of loads in the case of steel tubular piles (where roughness and adhesion may be determined by rusting) were described by Rybak [
12]. The coefficients of cohesion and friction are linked to the surface finishing treatment. In calculations of foundation piles, this phenomenon is very important for achieving bearing capacity by the pile’s side surface and in the scope of calculations of the palisade as a retaining structure.
The need for a detailed description of a pile’s side surface led to the dynamic development of methods and parameters for the quantitative description of surface irregularities. Currently, the principles of measurements and definitions of parameters that numerically describe 3D surface irregularities are normalized [
13]. The number of used spatial parameters is constantly growing, and new parameters are emerging for the assessment of surfaces in various technologies and applications [
1,
14,
15,
16]. The most commonly used method of graphical presentation of the examined surface is an isometric image with appropriately selected dimensions and resolution.
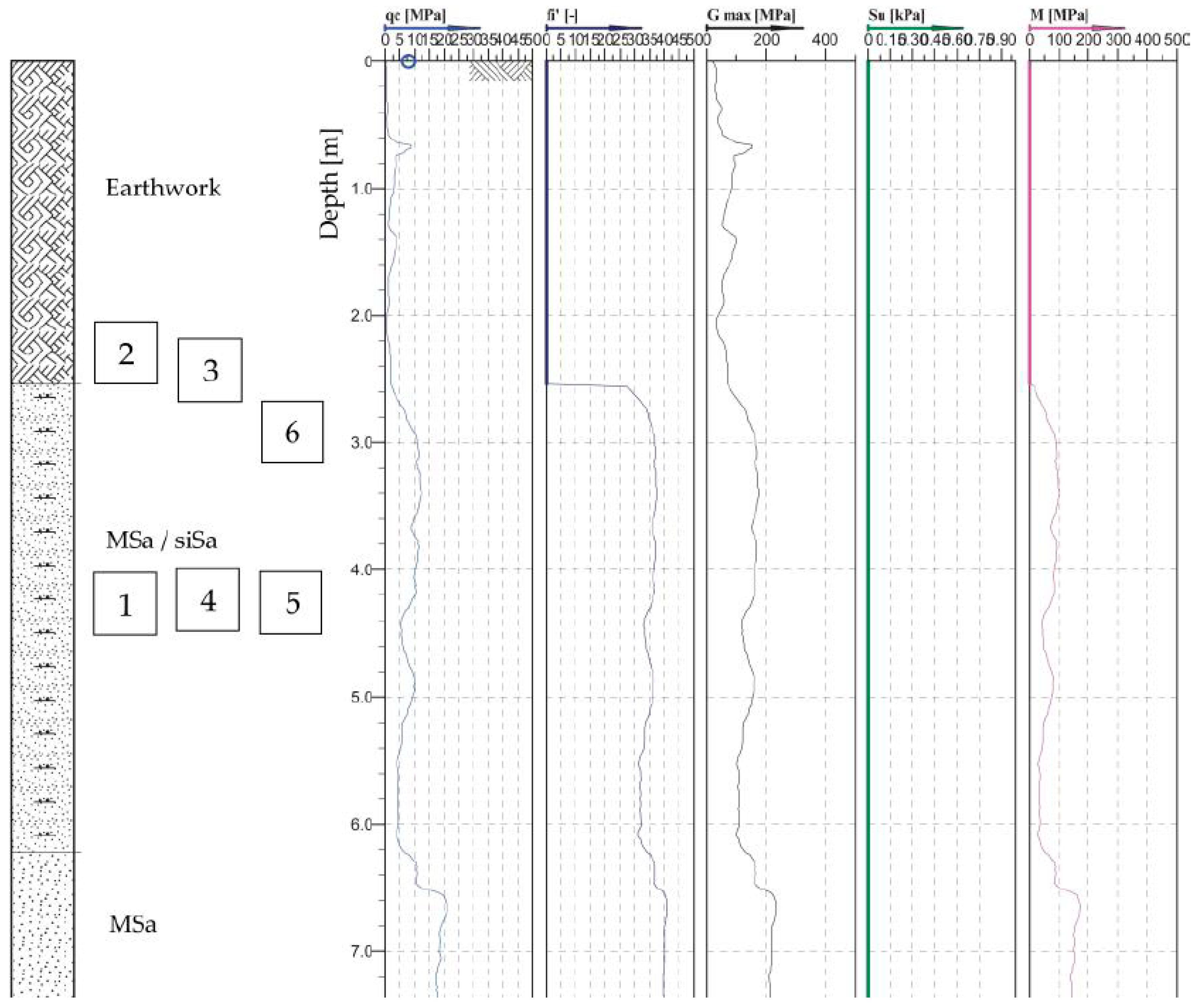
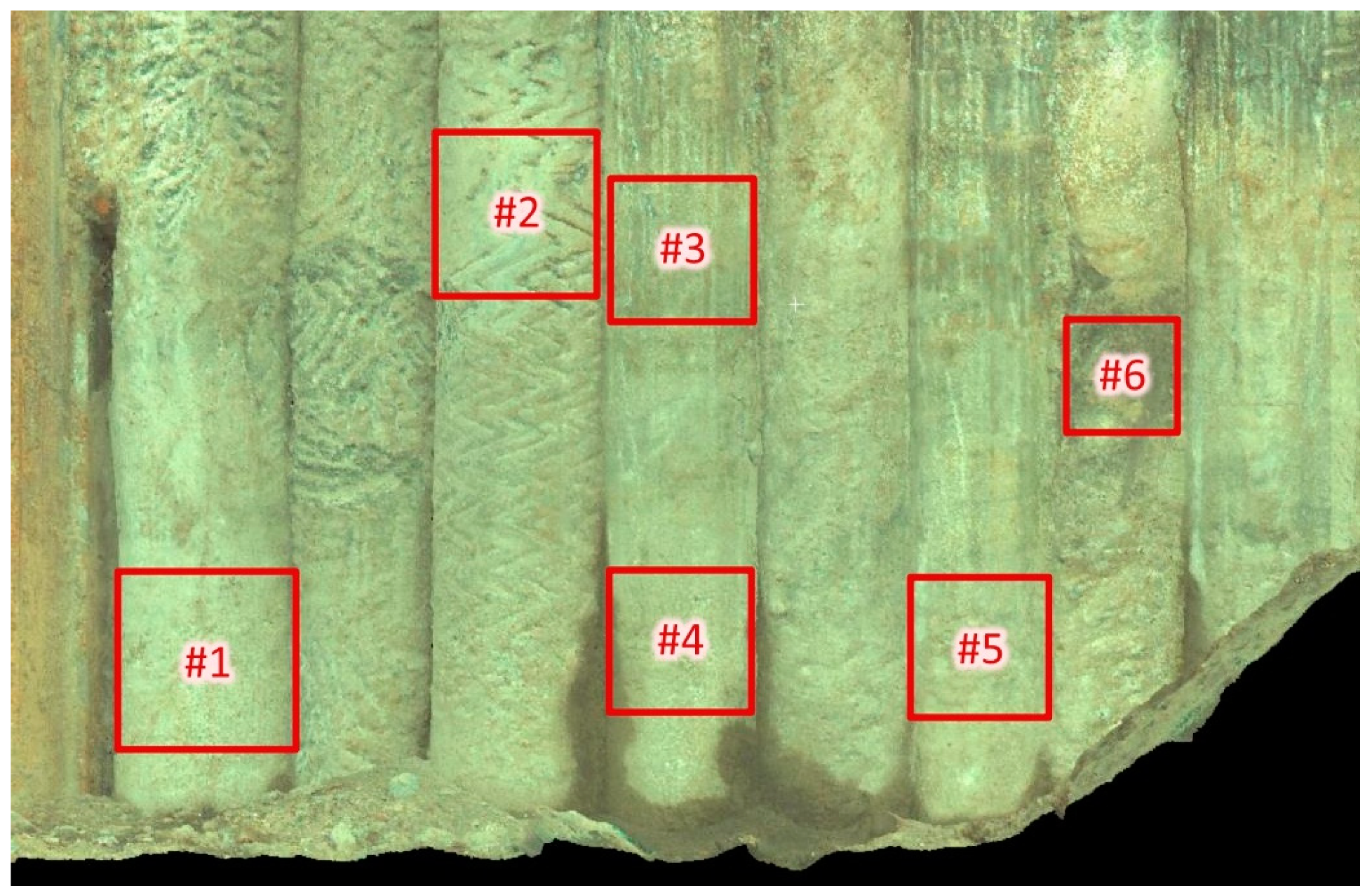
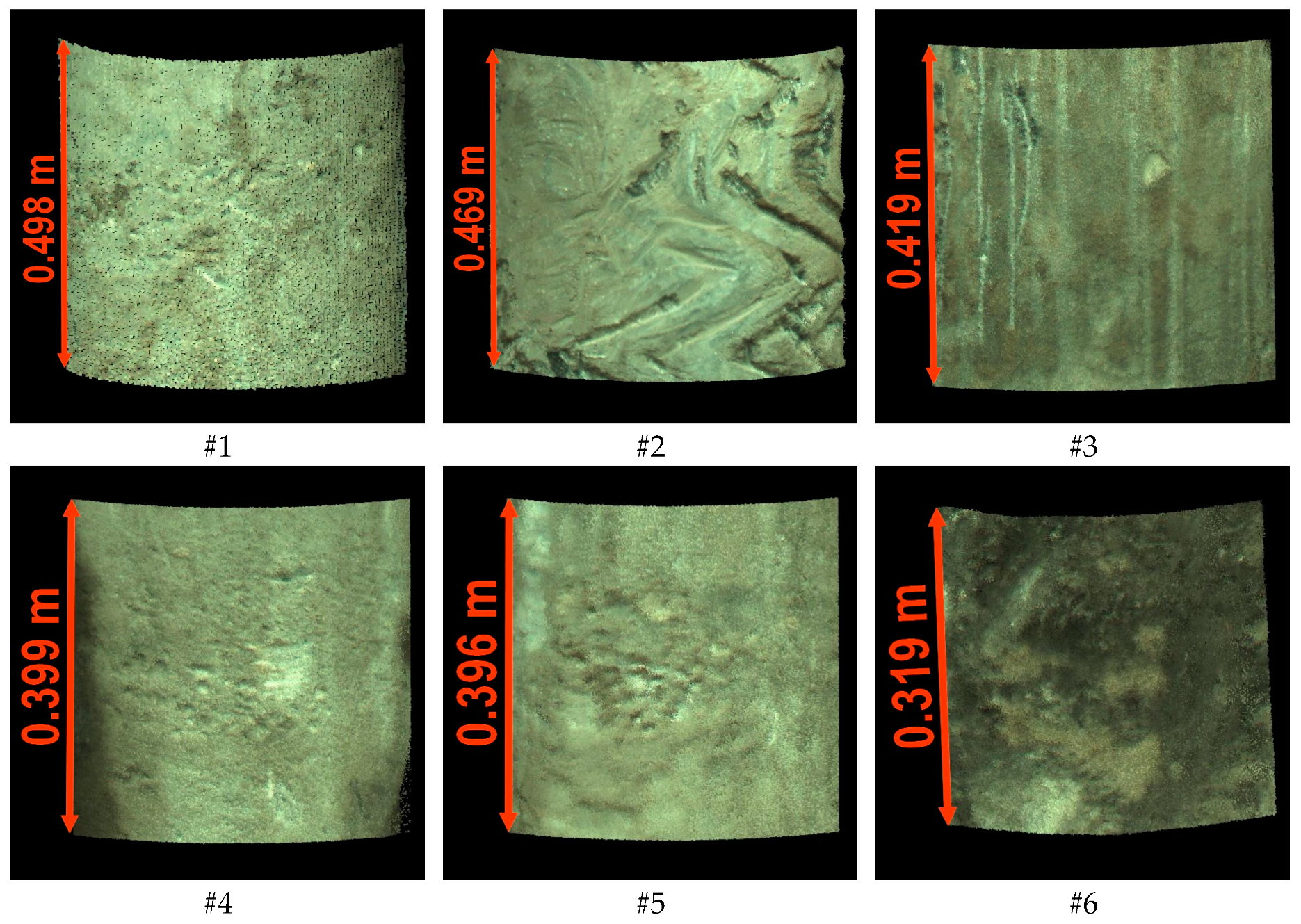
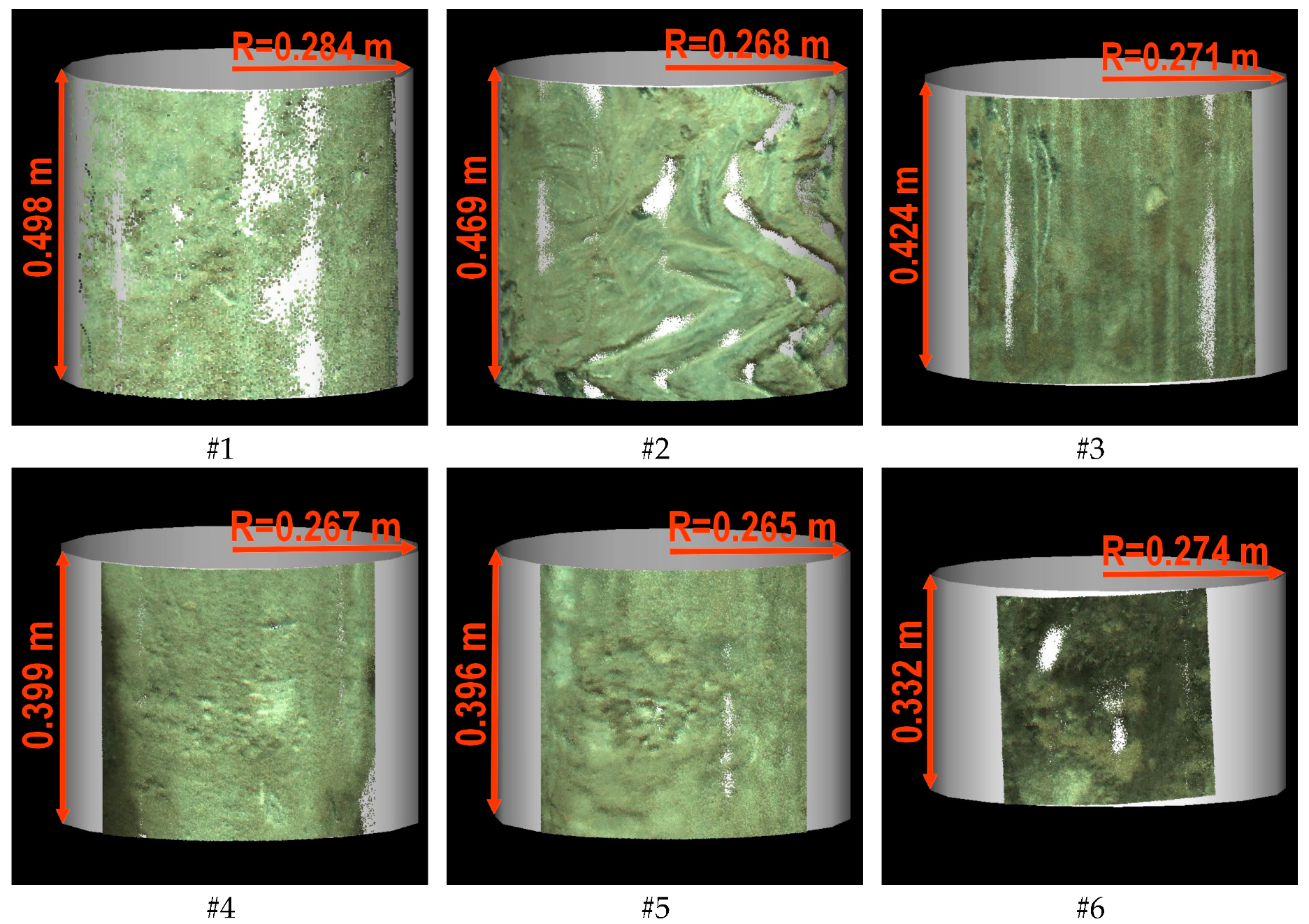
In this work, the lateral surface of concrete piles forming a palisade, which secures an excavation, was analyzed. The deep excavation, which was located in an urbanized area, extended to 4.30 m below ground level. The piles were inserted in complex geotechnical conditions as secant with positive overlapping. The palisade was made of class C30/37 concrete. The piles were implemented with CFA technology in layered subsoil. The measurement of the geometric shape of the piles’ lateral surface, after their excavation, was performed with a laser scanner. After the appropriate treatment of the point cloud, six sub-areas were selected, and for these sub-areas, 3D models of the concrete surface were created and areal parameters describing the topography of the surface (height and functional volume) in accordance with the standard [
13] were determined. The obtained results were associated with the geotechnical profile of the soil, which may be important in assessing the bearing capacity of the pile’s side surface.
4. Discussion
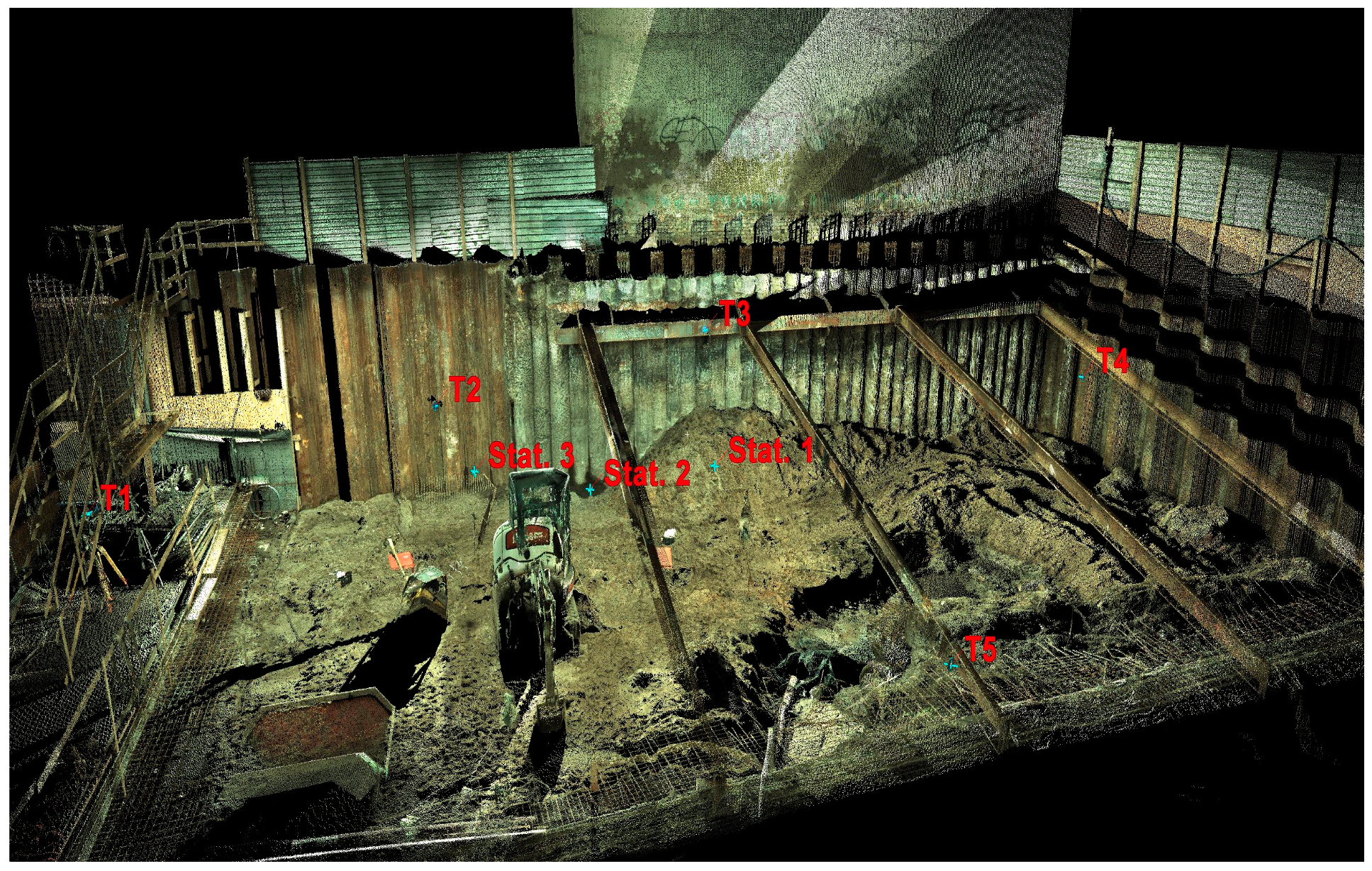
TLS gives the possibility of a detailed description of the geometric shape of building structures, including in difficult field conditions prevailing at the construction site. Scanner positions were located inside the excavation, where typical construction works were in progress. For the issue considered in this work, the ideal solution would be using a triangulation scanner (due to their higher accuracy). However, this is usually not possible, due to the size of the measured object, excessive distance to the object, and winter conditions occurring at the construction site. Using a pulse scanner, with a distance to the object not exceeding 10 m, allowed a satisfactory measurement accuracy to be obtained.
The innovative application of TLS for topography description of the side surface of piles delivers valuable information. The foundation piles are rarely excavated, and there is no wider research describing the real roughness of the side surface of these piles in accordance with the standard ISO 25178-2:2012. Instead, qualitative (i.e., subjective and not quantitative) descriptions of roughness are used for pile design, based on laboratory tests, which are carried out on hypothetical samples that do not reflect the real shape of piles’ side surface. Real piles (as presented in this work) are usually more complex than the artificial samples prepared in the laboratory, due to the character of the surface of the palisade composed of secant piles in variable geotechnical conditions.
The change in soil strength parameters, grain size distribution, soil pressure, and, as a consequence, roughness parameters, occurs gradually in selected areas. The assessment and comparison of the obtained parameters of the concrete surface were carried out in relation to the results of the available research and roughness scale described in Eurocode 2. The lack of documented in situ tests of palisades in the literature justifies this procedure.
Table 6 presents the proposed values for the cohesion and the coefficient of friction.
Similarly, if using the description of a rough surface according to [
19], then a coefficient of friction
can be assumed for the examined surface of the pile, and this value can be used in Equation (1) when calculating the shear strength of the pile in connection with the concrete supporting structure. The occurrence of surface creasing reflecting the movement of the auger in area 2 before the removal of the multi-plane form can be interpreted as an “indented” type of surface with a high value of coefficient of friction, μ = 0.90. These are typical CFA pile surfaces.
The tests of concrete surface parameters described in [
15] were carried out on the samples prepared in the laboratory. In these cases, the working conditions of the triangulation scanner were favorable in a controlled environment at a positive temperature and in the absence of other adverse atmospheric phenomena. Surface scanning in the laboratory is usually a preliminary step before further investigations, such as pull-outs [
5,
6], tension stresses, shear stresses, and a combination of shear and compression stresses [
42] on samples of concrete surfaces with homogeneous, already known surface parameters. The research described in [
42] was made with a profilometer and roughness parameters from the 2D group were obtained. The samples were subjected to further tests to determine the shear strength parameter. Maximum valley depth (
Rv) presented an almost linear correlation with the concrete bond strength in shear. The results indicate that the
Rv roughness parameter could be adequate to incorporate in design expression for the longitudinal shear strength of the interface between the concretes [
42]. The current research on the CFA palisade is performed for 3D surface analysis, where the equivalent of the
Rv parameter is the Dale void volume (
Vvv) parameter. The
Vvv parameter represents the void volume of dale at the areal material ratio
p%. It can quantify the magnitude of the core surface, reduced peaks, and reduced valleys using the other functional volume parameters
Vmp,
Vmc, and
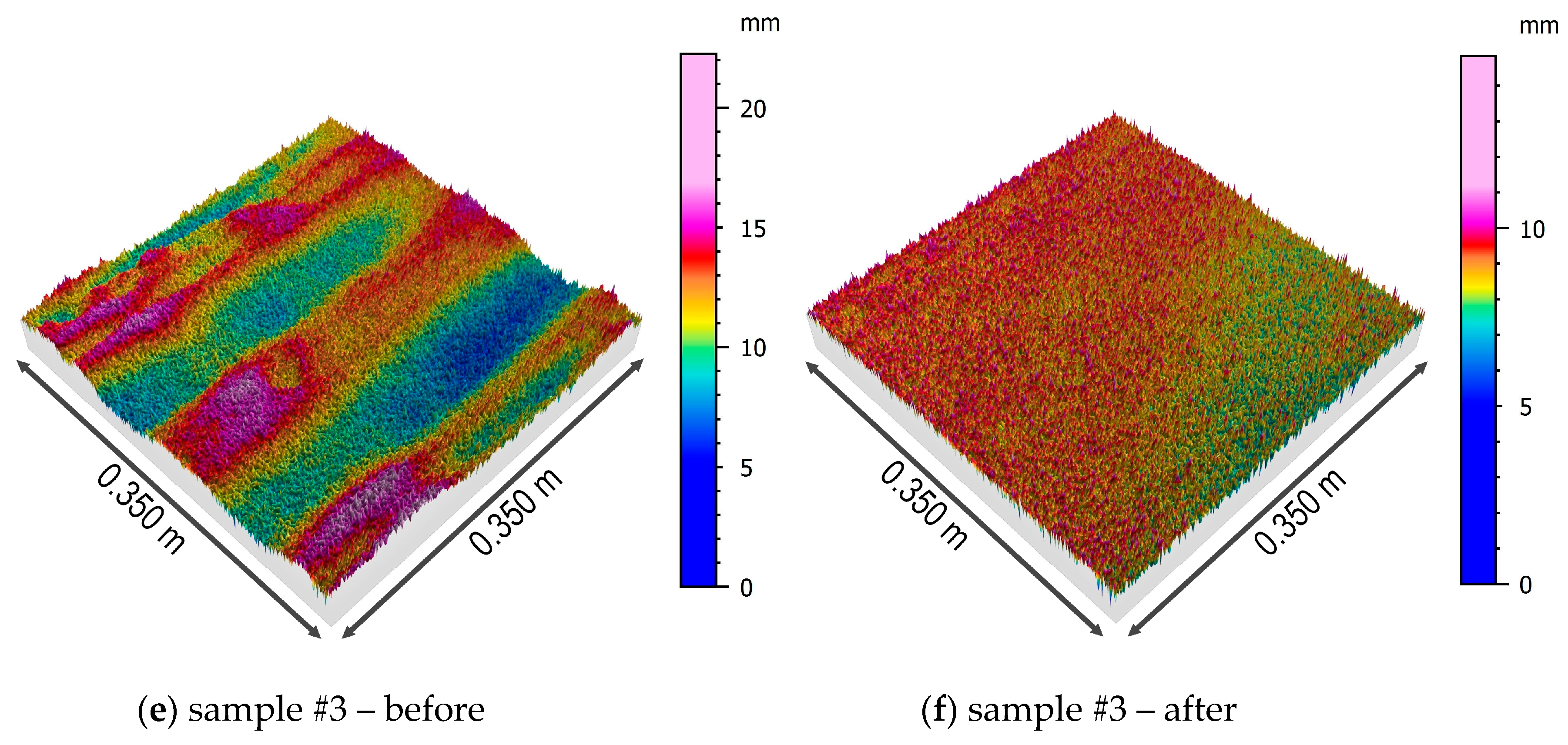
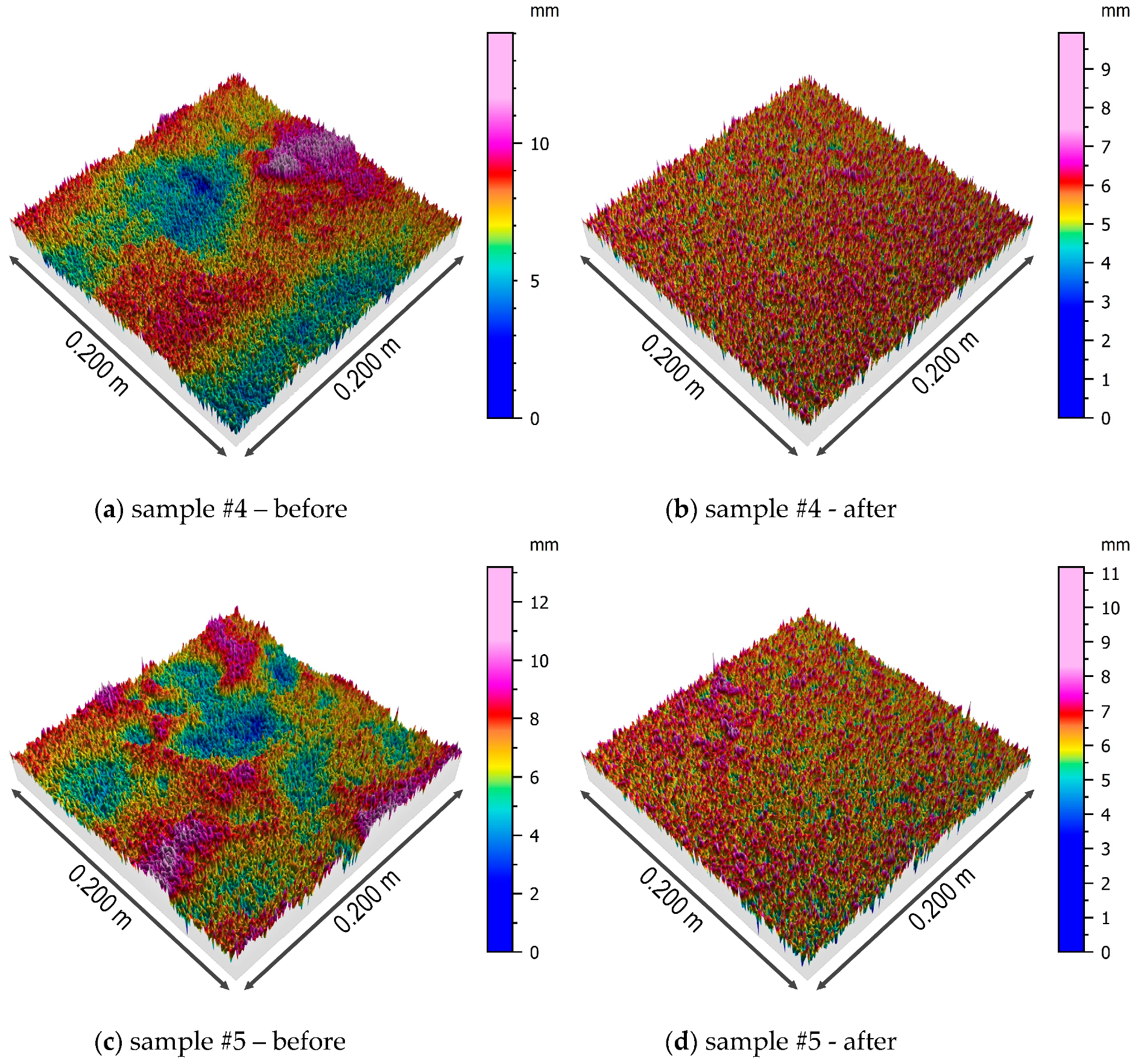
Vvc. For sample areas 2 and 3, the values of the functional volume parameters
Vmp and
Vvv are higher than for samples 4 and 5. This can be ascribed to the particles of the composite earthwork layer with low strength parameters being more penetrated and moved by the concrete under forming pressure than the robust medium sand (MSa) soil. The peak material volume parameter
Vmp describes the volume of concrete located on the highest peaks of the pile surface, which will be cracked or removed during the pile loading process. The volume featured by
Vvv is filled with soil in the concrete valleys and again the values of the
Vvv parameter are smaller for samples 4 and 5. Shaft friction between the concrete surface and the soil in the valleys is smaller, because the normal effective stress σ
z on the concrete surface in the cavities is less than the effective stress σ
z resulting from the soil rest pressure on the basic vertical surface of the pile. The obtained values of
Vmp and
Vvv explain the expected higher pile shaft resistance in the medium sand layer. Practical engineering application may take into account the influence of skewness and kurtosis on the static coefficient of friction. In [
43], the effects of kurtosis and skewness on different levels of surface roughness were investigated independently. It was found that positive skewness values were associated with larger contact force, real area of contact, and tangential and adhesion forces than the Gaussian case, while negative skewness values predicted lower values tangential and adhesion forces and larger deviations from the Gaussian case. It was also found that distributions with kurtosis higher than 3 predict higher friction parameters compared with the Gaussian case, while distributions with kurtosis lower than 3 predict lower values than the Gaussian case [
43]. In the case of the studied surface areas, lower shear strength can be expected for areas 2 and 3 than for areas 4 and 5.
The evaluation of the obtained roughness parameters is also of practical use for the issues of the numerical modeling of the structure–soil interaction. The interface between two different materials is of critical importance in numerical modeling. For instance, in the PLAXIS [
44] finite element code, it is accounted for by providing special zero-thickness interface elements and suitable values of the strength reduction factor
[
45] for implemented interface elements. The strength reduction factor
reduces the soil shear strength parameters
c and
φ into interface strength parameters
and
, according to the following equations:
The normal stiffness and shear stiffness of the interface element are directly proportional to the soil stiffness. The strength reduction factor
depends on the roughness of the structure with respect to the surrounding soil. In a finite element model, interface elements are placed along the vertical limit surface between the pile and soil, and hence mobilized shear resistance along the interface can be modeled by adjusting the value of the
parameter. It is important to estimate a reasonably proper value of
, as it significantly affects the results. Numerical examples show that the lower the interface value
, the larger the bending moment in the excavation support [
46]. The recommended values of the strength reduction factor
are presented in
Table 7 [
45].
The values listed in
Table 7 do not directly take into account the type of surface roughness. Moormann [
47] performed experiments with stiff clays and rough concrete surface typical of bored piles. For these arrangements, he found that there is no substantial reduction in either friction or cohesion. The estimation of the strength reduction factor can be made using a back-analysis calculation based on a full-scale field test and numerical model of the task. However, care must be taken when setting up a numerical model, as the combination of various assumptions (material model, soil stiffness parameters, mesh coarsening) may significantly influence the outcome of the numerical calculation. For a strength reduction factor for rough concrete surfaces, the upper limit of the range in
Table 7 can be applied. On the basis of the tests for the investigated rough concrete surface and the proposed values in
Table 7, it is possible to determine a value of
of around 0.70 in an earthwork layer and of around 1.0 in a medium sand layer.
According to [
48], the pile skin friction angle
in Equation (4) for concrete piles has a value of 2/3 or 3/4 of
. In most arrangements of pile–soil interfaces, this assumption can lead to more conservative estimations of shear strength in the analytical method than in the numerical modeling of the task. Due to various estimates of pile shaft bearing capacity, it would be worthwhile to reproduce the substantial pile surface in the form of laboratory samples. Such concrete samples, as well as the ground conditions and pressure on the surface of the samples, can be modeled in direct shear apparatus or using a torsional test in order to determine the shear stress and skin friction using back-analysis. In [
49], five diverse types of concrete sample were used to study the effect of surface shape on the stress displacement relationship; however, these samples did not map the real piles, and only the qualitative description of concrete roughness was applied.
The bearing capacity by the side surface for rough surfaces of the pile is undoubtedly greater than it is for smooth surfaces [
49]. A mobilization of the shaft bearing capacity on the order of 1.5% of the pile diameter takes place with pile settlements, and a mobilization of the bearing capacity of the base with settlements on the order of 2–3% takes place [
35,
50]. The higher share of pile shaft bearing capacity in the total load capacity results in a more favorable characteristic of the load-settling curve. This is advantageous for the ULS state, with smaller settlements observed for the same load values.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}