Multitemporal Terrestrial Laser Scanning for Marble Extraction Assessment in an Underground Quarry of the Apuan Alps (Italy)


Abstract
:1. Introduction
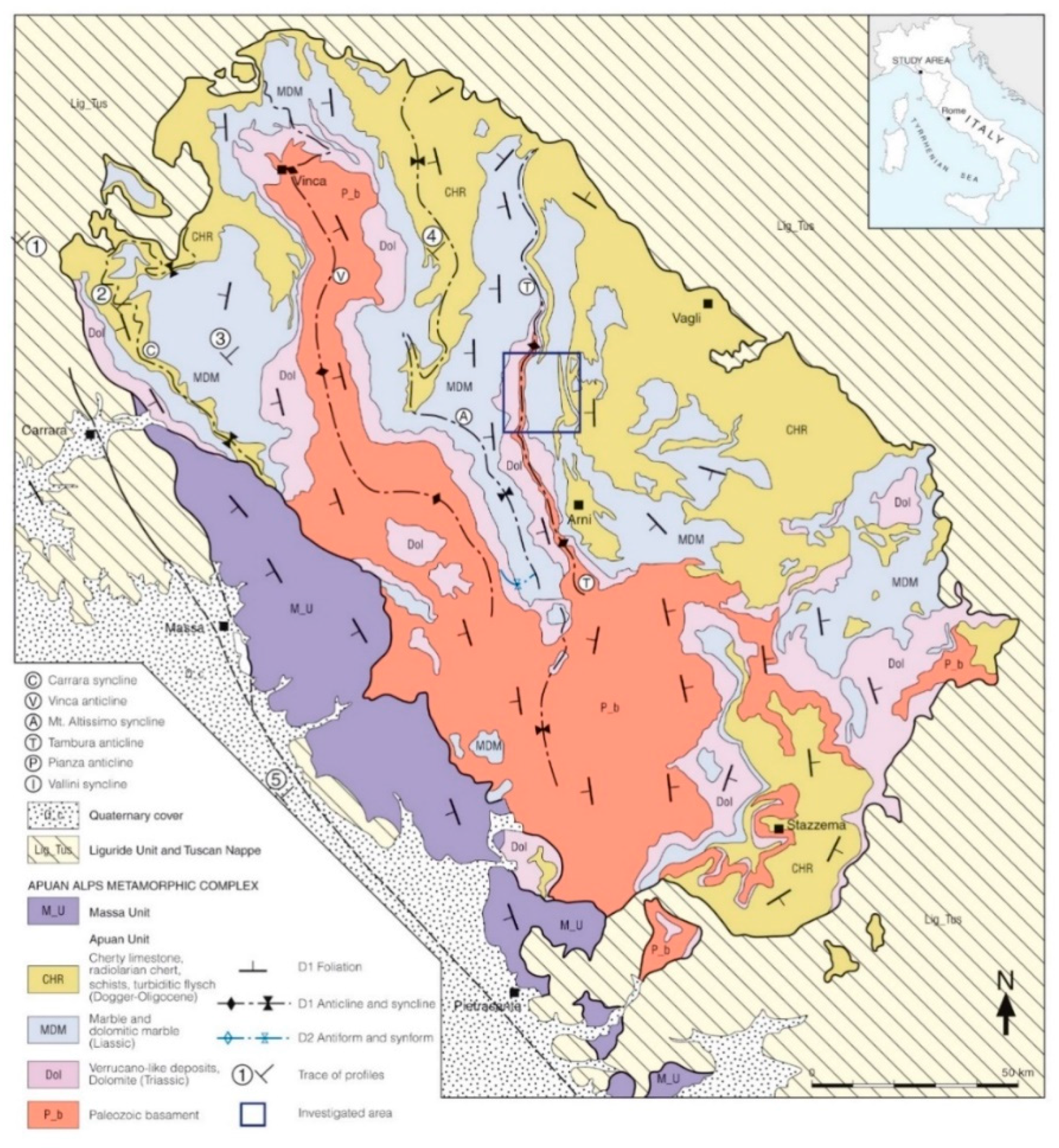
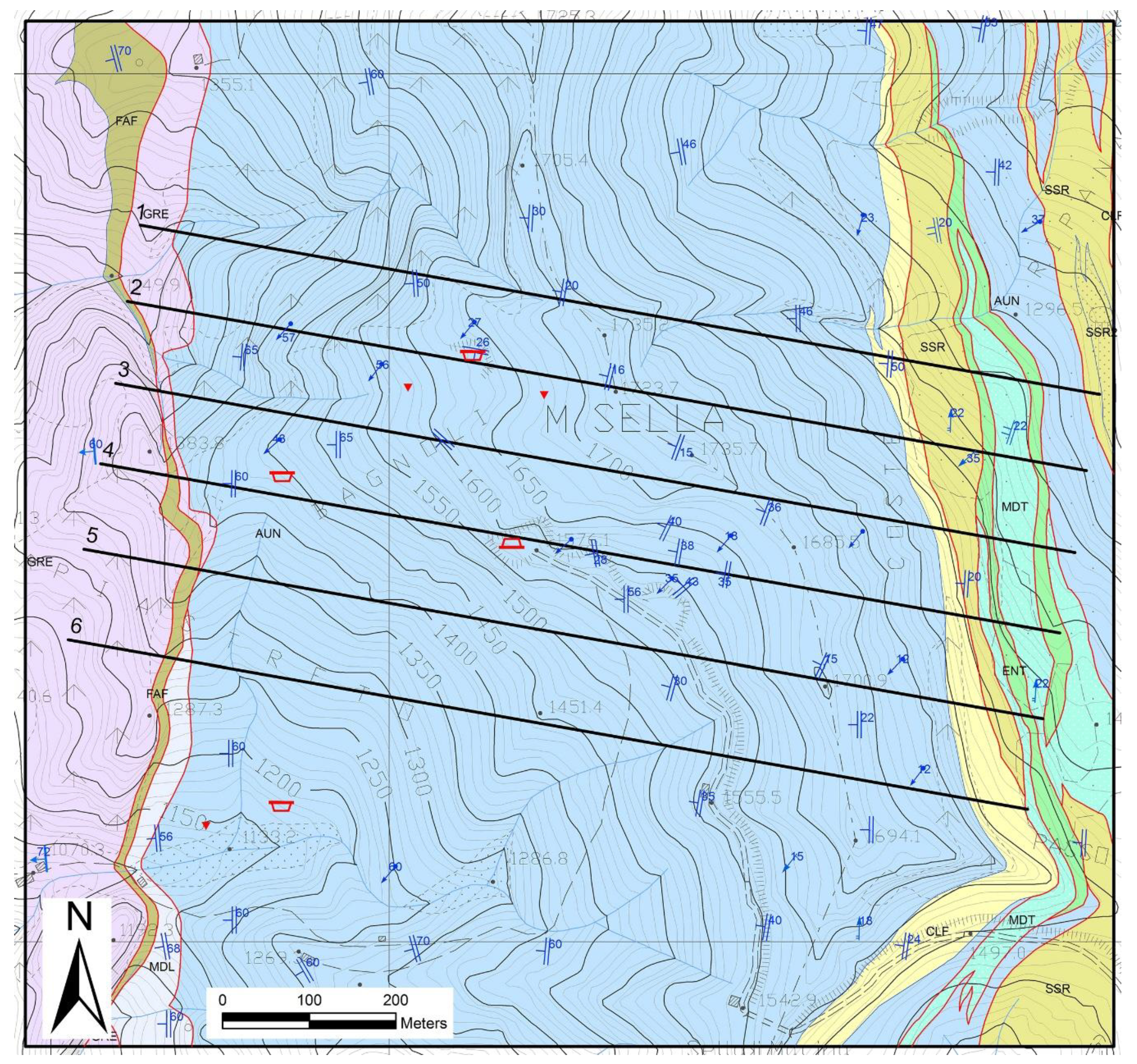
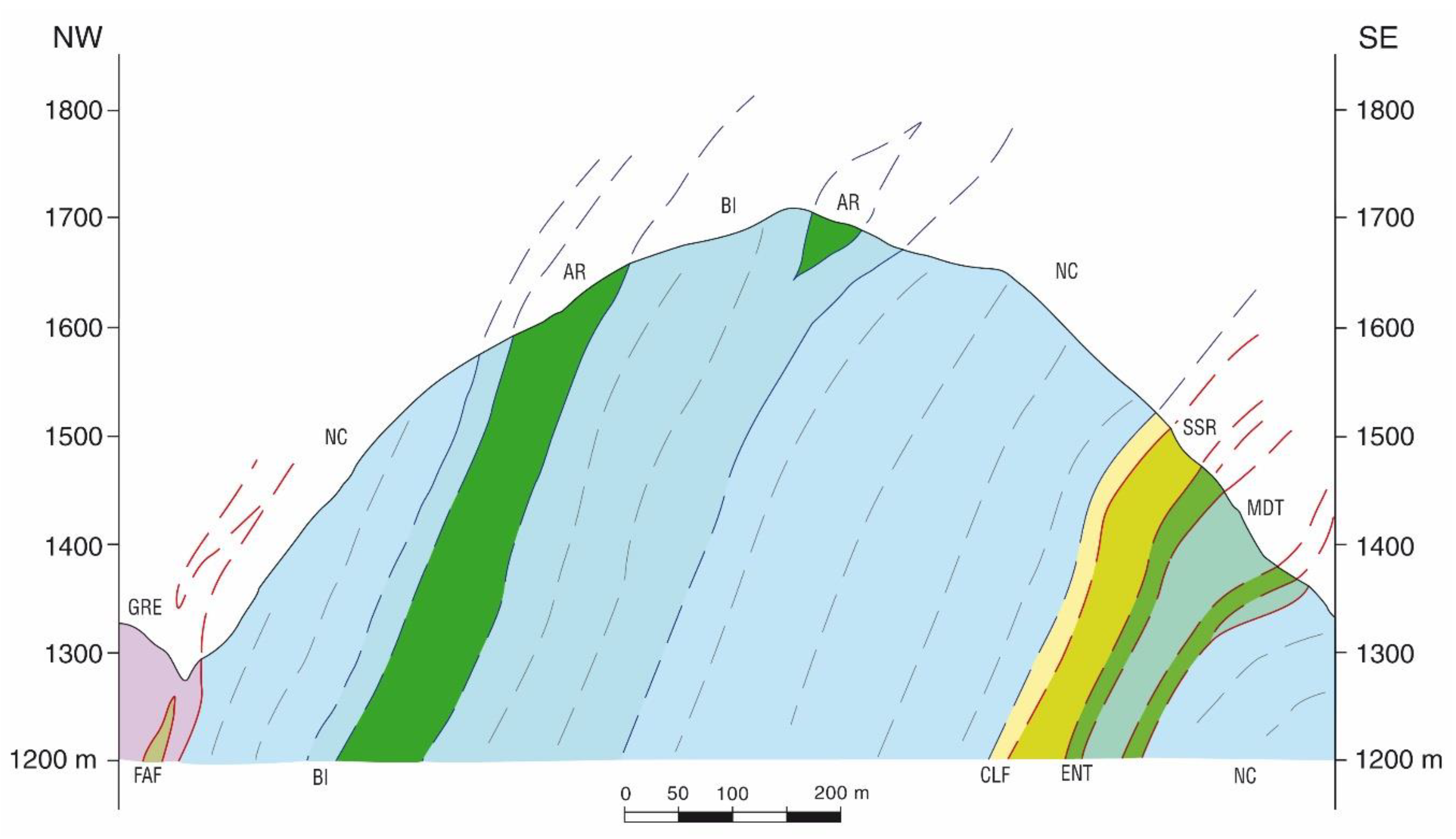
2. Study Area and Geological Setting
3. Materials and Methods
3.1. Data Acquisition and Processing
3.2. Multitemporal Point Clouds Comparison and Volume of Extracted Material Computation
- -
- The normal scale (D), the projection scale (d), and the cylinder depth. “D” corresponds to the diameter of a disk centered in a given core point “i”. The disk comprises neighbor points, utilized to automatically fit a plane, from which a normal vector is defined [7]. A uniform normal scale, or a range of normal scales, can be iteratively applied to the considered point cloud. The orientation of the normal (i.e., vertical or horizontal) can be also selected. “d” is the diameter of a cylinder which intersects the clouds under comparison and, going through a given point “i”, it has the major axis oriented along the normal vector. The cylinder separates two subsets from the clouds, whose mean distribution gives their average positions, i1 and i2. In this method, the local distance between the point clouds corresponds to the length of the major axis segment between i1 and i2. The length standard deviation estimates the point cloud roughness along the normal direction. The max cylinder depth corresponds to the magnitude of difference between the compared point clouds.
- -
- -
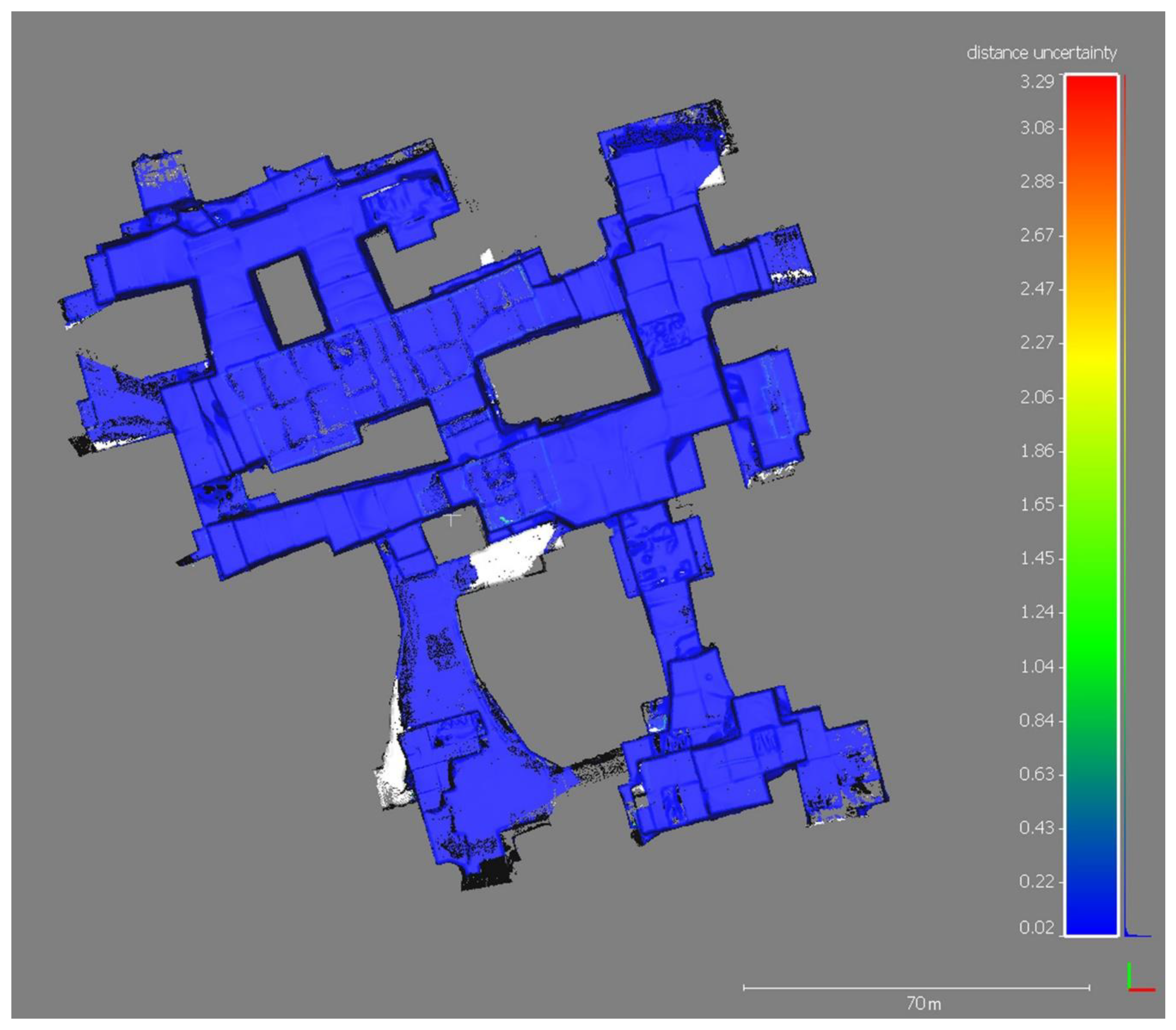
- The coregistration error (coreg) which is related to the accuracy of multitemporal point clouds alignment.
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fanti, R.; Gigli, G.; Lombardi, L.; Tapete, D.; Canuti, P. Terrestrial laser scanning for rockfall stability analysis in the cultural heritage site of Pitigliano (Italy). Landslides 2013, 10, 409–420. [Google Scholar] [CrossRef]
- Abellán, A.; Oppikofer, T.; Jaboyedoff, M.; Rosser, N.J.; Lim, M.; Lato, M.J. Terrestrial laser scanning of rock slope instabilities. Earth Surf. Process. Landforms 2014, 39, 80–97. [Google Scholar] [CrossRef]
- Assali, P.; Grussenmeyer, P.; Villemin, T.; Pollet, N.; Viguier, F. Surveying and modeling of rock discontinuities by terrestrial laser scanning and photogrammetry: Semi-automatic approaches for linear outcrop inspection. J. Struct. Geol. 2014, 66, 102–114. [Google Scholar] [CrossRef]
- O’Neal, M.A.; Pizzuto, J.E. The rates and spatial patterns of annual riverbank erosion revealed through terrestrial laser-scanner surveys of the South River, Virginia. Earth Surf. Process. Landforms 2011, 36, 695–701. [Google Scholar] [CrossRef]
- Brasington, J.; Vericat, D.; Rychkov, I. Modeling river bed morphology, roughness, and surface sedimentology using high resolution terrestrial laser scanning. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef] [Green Version]
- Day, S.S.; Gran, K.B.; Belmont, P.; Wawrzyniec, T. Measuring bluff erosion part 1: Terrestrial laser scanning methods for change detection. Earth Surf. Process. Landforms 2013, 38, 1055–1067. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Kuhn, D.; Prüfer, S. Coastal cliff monitoring and analysis of mass wasting processes with the application of terrestrial laser scanning: A case study of Rügen, Germany. Geomorphology 2014, 213, 153–165. [Google Scholar] [CrossRef]
- Kovanič, Ľ.; Blišťan, P. Quarry Wall Stability Assessment Using TLS Method. Adv. Mater. Res. 2014. [Google Scholar] [CrossRef]
- Deliormanli, A.H.; Maerz, N.H.; Otoo, J. Using terrestrial 3D laser scanning and optical methods to determine orientations of discontinuities at a granite quarry. Int. J. Rock Mech. Min. Sci. 2014. [Google Scholar] [CrossRef]
- Havaej, M.; Coggan, J.; Stead, D.; Elmo, D. A combined remote sensing–numerical modelling approach to the stability analysis of delabole slate quarry, Cornwall, UK. Rock Mech. Rock Eng. 2016, 49, 1227–1245. [Google Scholar] [CrossRef]
- Campbell, A.D.; Thurley, M.J. Application of laser scanning to measure fragmentation in underground mines. Min. Technol. 2017, 126, 240–247. [Google Scholar] [CrossRef]
- Long, N.Q.; Buczek, M.M.; Szlapińska, S.A.; Nam, B.X.; Nghia, N.V.; Cuong, C.X. Accuracy assessment of mine walls’ surface models derived from terrestrial laser scanning. Int. J. Coal Sci. Technol. 2018, 5, 328–338. [Google Scholar] [CrossRef]
- Živec, T.; Anžur, A.; Verbovšek, T. Determination of rock type and moisture content in flysch using TLS intensity in the Elerji quarry (south-west Slovenia). Bull. Eng. Geol. Environ. 2018, 1–13. [Google Scholar] [CrossRef]
- Lerma García, J.L.; Van Genechten, B.; Heine, E.; Santana Quintero, M. Theory and practice on Terrestrial Laser Scanning; Editorial de la Universidad Politécnica de Valencia: Valencia, Spain, 2008; ISBN 978-84-8363-312-0. [Google Scholar]
- Vosselman, G.; Hans-Gerd, M. Airborne and Terrestrial Laser Scanning; Whittles Publishing: Scotland, UK, 2010; ISBN 978-1904445-87-6. [Google Scholar]
- James, L.A.; Hodgson, M.E.; Ghoshal, S.; Latiolais, M.M. Geomorphic change detection using historic maps and DEM differencing: The temporal dimension of geospatial analysis. Geomorphology 2012, 137, 181–198. [Google Scholar] [CrossRef]
- Bossi, G.; Cavalli, M.; Crema, S.; Frigerio, S.; Quan Luna, B.; Mantovani, M.; Marcato, G.; Schenato, L.; Pasuto, A. Multi-temporal LiDAR-DTMs as a tool for modelling a complex landslide: A case study in the Rotolon catchment (eastern Italian Alps). Nat. Hazards Earth Syst. Sci. 2015, 15, 715–722. [Google Scholar] [CrossRef]
- Schürch, P.; Densmore, A.L.; Rosser, N.J.; McArdell, B.W. Dynamic controls on erosion and deposition on debris-flow fans. Geology 2011, 39, 827–830. [Google Scholar] [CrossRef] [Green Version]
- Rychkov, I.; Brasington, J.; Vericat, D. Computational and methodological aspects of terrestrial surface analysis based on point clouds. Comput. Geosci. 2012, 42, 64–70. [Google Scholar] [CrossRef]
- Barbarella, M.; Fiani, M.; Lugli, A. Landslide monitoring using multitemporal terrestrial laser scanning for ground displacement analysis. Geomatic. Nat. Hazards Risk 2015, 6, 398–418. [Google Scholar] [CrossRef]
- Abellan, A.; Derron, M.-H.; Jaboyedoff, M. “Use of 3D Point Clouds in Geohazards” Special Issue: Current Challenges and Future Trends. Remote Sens. 2016. [Google Scholar] [CrossRef]
- Al-Rawabdeh, A.; Moussa, A.; Foroutan, M.; El-Sheimy, N.; Habib, A. Time series UAV image-based point clouds for landslide progression evaluation applications. Sensors 2017, 17, 2378. [Google Scholar] [CrossRef] [PubMed]
- Esposito, G.; Salvini, R.; Matano, F.; Sacchi, M.; Danzi, M.; Somma, R.; Troise, C. Multitemporal monitoring of a coastal landslide through SfM-derived point cloud comparison. Photogramm. Rec. 2017, 32, 459–479. [Google Scholar] [CrossRef]
- Watson, C.S.; Quincey, D.J.; Smith, M.W.; Carrivick, J.L.; Rowan, A.V.; James, M.R. Quantifying ice cliff evolution with multi-temporal point clouds on the debris-covered Khumbu Glacier, Nepal. J. Glaciol. 2017, 63, 823–837. [Google Scholar] [CrossRef] [Green Version]
- Keilig, K.-P.; Dietrich, A.; Krautblatter, M. Comparison of Multi-temporal Elevation Models of a Debris-Flow Channel. In IAEG/AEG Annual Meeting Proceedings, San Francisco, CA, USA; Slope Stability: Case Histories, Landslide Mapping, Emerging Technologies; Shakoor, A., Cato, K., Eds.; Springer: Cham, Switzerland, 2018; Volume 1, pp. 275–282. ISBN 978-3-319-93124-1. [Google Scholar]
- Mayr, A.; Rutzinger, M.; Geitner, C. Multitemporal analysis of objects in 3D point clouds for landslide monitoring. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42. [Google Scholar] [CrossRef]
- Nikolakopoulos, K.G.; Antonakakis, A.; Kyriou, A.; Koukouvelas, I.; Stefanopoulos, P. Comparison of terrestrial laser scanning and structure-from-motion photogrammetry for steep slope mapping. In Earth Resources and Environmental Remote Sensing/GIS Applications IX; International Society for Optics and Photonics: San Diego, CA, USA, 2018. [Google Scholar]
- Rossi, G.; Tanteri, L.; Tofani, V.; Vannocci, P.; Moretti, S.; Casagli, N. Multitemporal UAV surveys for landslide mapping and characterization. Landslides 2018, 1–8. [Google Scholar] [CrossRef]
- Stumpf, A.; Malet, J.P.; Allemand, P.; Pierrot-Deseilligny, M.; Skupinski, G. Ground-based multi-view photogrammetry for the monitoring of landslide deformation and erosion. Geomorphology 2015, 231, 130–145. [Google Scholar] [CrossRef]
- Kazhdan, M.; Bolitho, M.; Hoppe, H. Poisson Surface Reconstruction. Available online: http://dl.acm.org/citation.cfm?id=1281957.1281965 (accessed on 21 January 2019).
- Carmignani, L.; Kligfield, R. Crustal extension in the northern Apennines: The transition from compression to extension in the Alpi Apuane Core Complex. Tectonics 1990, 9, 1275–1303. [Google Scholar] [CrossRef]
- Elter, P. Introduction a la geologie de l’Apennin septentrional. Bulletin de la Société géologique de France 1975, 7, 956–962. [Google Scholar] [CrossRef]
- Molli, G. Northern Appennine-Corsica Orogenic System: An Updated Review; Siegesmund, S., Fügenschuh, B., Froidzheim, N., Eds.; Geological Society of London Special Publication: London, UK, 2008. [Google Scholar]
- Conti, P.; Carmigani, L.; Giglia, G.M.M.; Fantozzi, P.L. Evolution of geological interpretations in the Alpi Apuane Metamorphic Complex, and their relevance for the geology of the Northern Apennines. In The Regione Toscana Project of Geological Mapping; Morini, D., Bruni, P., Eds.; Case Histories and Data Acquisition: Florence, KY, USA, 2004; pp. 241–262. [Google Scholar]
- Molli, G.; Vaselli, L. Structures, interference patterns and strain regime during mid-crustal deformation in the Alpi Apuane (Northern Appennines, Italy). In Styles of Continental Contraction; Mazzoli, S., Buler, V., Eds.; Geological Society of America: Boulder, CO, USA, 2006; Volume 414, pp. 79–93. [Google Scholar]
- Yang, C.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 586–607. [Google Scholar] [CrossRef]
- CloudCompare Official Web Site. Available online: http://www.danielgm.net/cc/ (accessed on 15 November 2018).
- Brodu, N.; Lague, D. 3D terrestrial lidar data classification of complex natural scenes using a multi-scale dimensionality criterion: applications in geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134. [Google Scholar] [CrossRef]
- Borradaile, G. Statistics of Earth Science Data: Their Distribution in Time, Space and Orientation; Springer Science and Business Media: Boston, NY, USA, 2003; ISBN 978-3-662-05223-5. [Google Scholar] [CrossRef]
- Godin, G.; Rioux, M.; Levoy, M.; Cournoyer, L.; Blais, F. An assessment of laser range measurement on marble surfaces. In Proceedings of the 5th Conference on Optical 3D Measurement Techniques, Wien, Austria, 1–4 October 2001; pp. 49–56. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TLS Dataset | N° Points | Registration Error (m) | Georeferencing Error (m) | Coregistration Error (m) |
|---|---|---|---|---|
| Piastreta 2016 | 7,141,309 | 0.005 | 0.004 | 0.035 |
| Piastreta 2017 | 4,107,555 | 0.009 | 0.003 |
| V1 | V2 | V3 | V4 | V5 | V6 | V7 | |
|---|---|---|---|---|---|---|---|
| Volume (m3) | 550 | 633 | 81.5 | 159 | 65 | 3123 | 96 |
| Surface area (m2) | 772 | 720 | 133 | 288 | 146 | 2934 | 150 |
| Error estimation (%) | 5.05 | 4.09 | 5.87 | 6.52 | 8.08 | 3.38 | 5.62 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Bartolo, S.; Salvini, R. Multitemporal Terrestrial Laser Scanning for Marble Extraction Assessment in an Underground Quarry of the Apuan Alps (Italy). Sensors 2019, 19, 450. https://doi.org/10.3390/s19030450
Di Bartolo S, Salvini R. Multitemporal Terrestrial Laser Scanning for Marble Extraction Assessment in an Underground Quarry of the Apuan Alps (Italy). Sensors. 2019; 19(3):450. https://doi.org/10.3390/s19030450
Chicago/Turabian StyleDi Bartolo, Silvia, and Riccardo Salvini. 2019. "Multitemporal Terrestrial Laser Scanning for Marble Extraction Assessment in an Underground Quarry of the Apuan Alps (Italy)" Sensors 19, no. 3: 450. https://doi.org/10.3390/s19030450
APA StyleDi Bartolo, S., & Salvini, R. (2019). Multitemporal Terrestrial Laser Scanning for Marble Extraction Assessment in an Underground Quarry of the Apuan Alps (Italy). Sensors, 19(3), 450. https://doi.org/10.3390/s19030450