Modeling and Studying Acceleration-Induced Effects of Piezoelectric Pressure Sensors Using System Identification Theory

Abstract
:1. Introduction
2. Theoretical Model for Acceleration-Induced Effects of Pressure Sensors
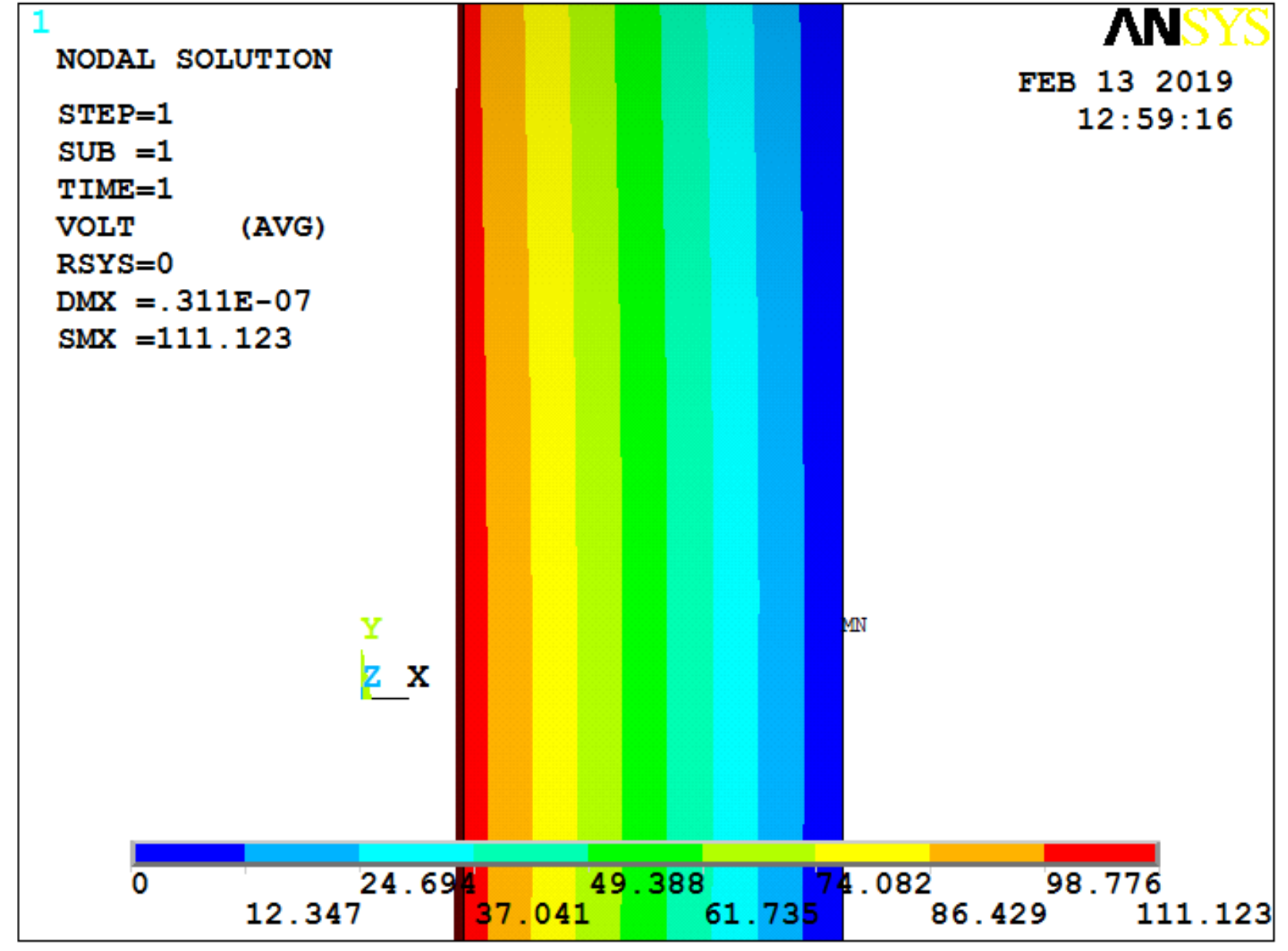
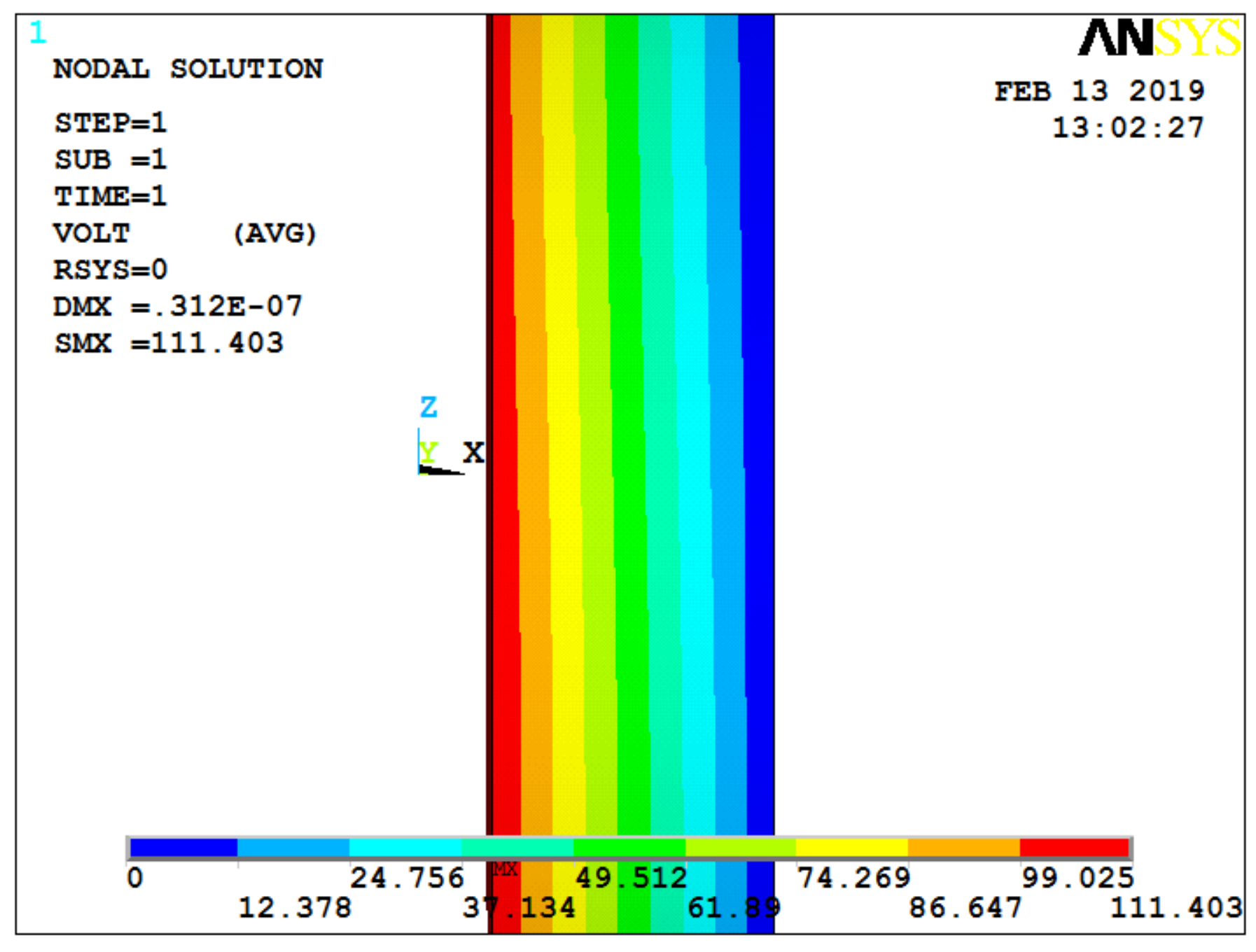
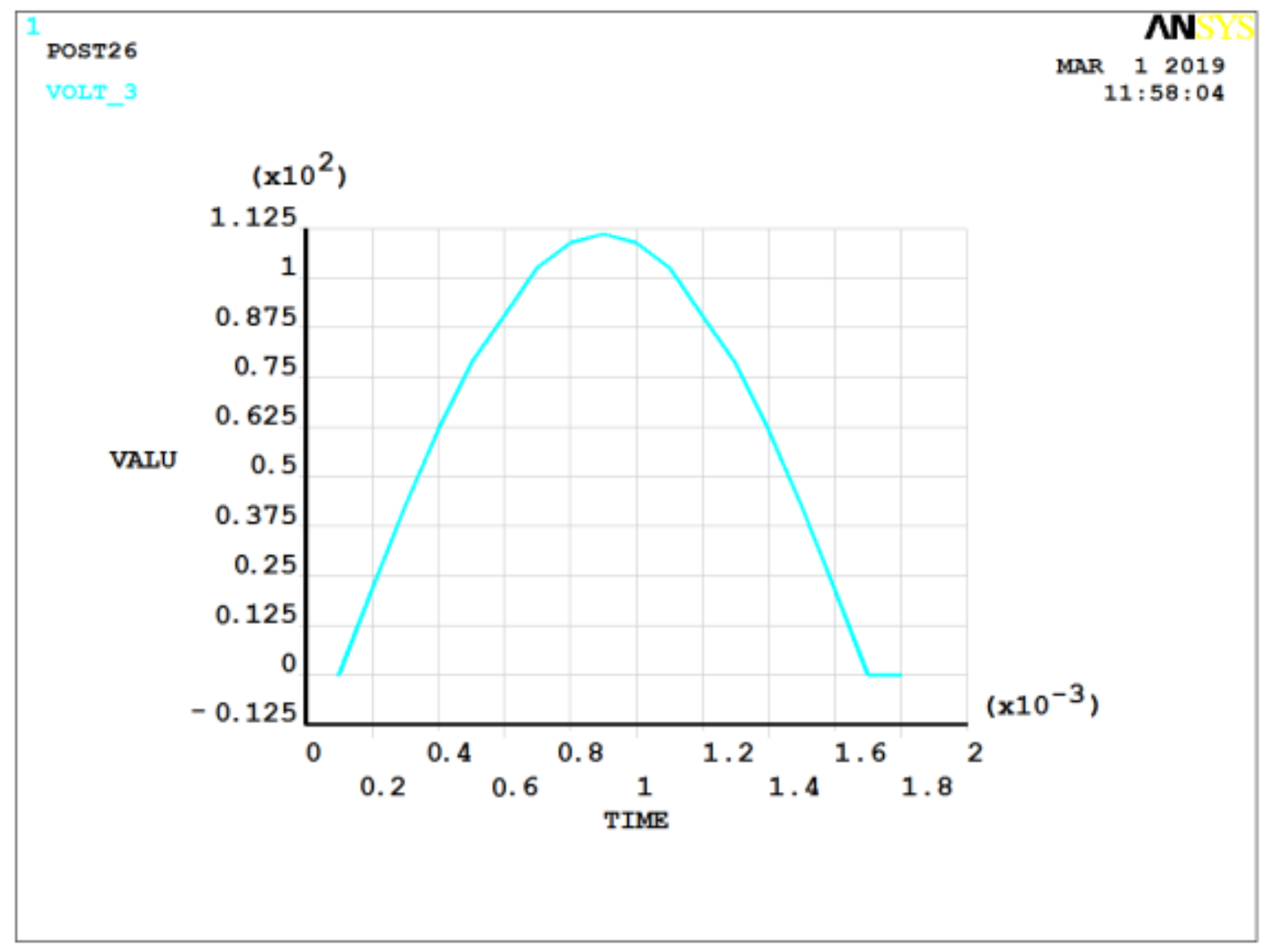
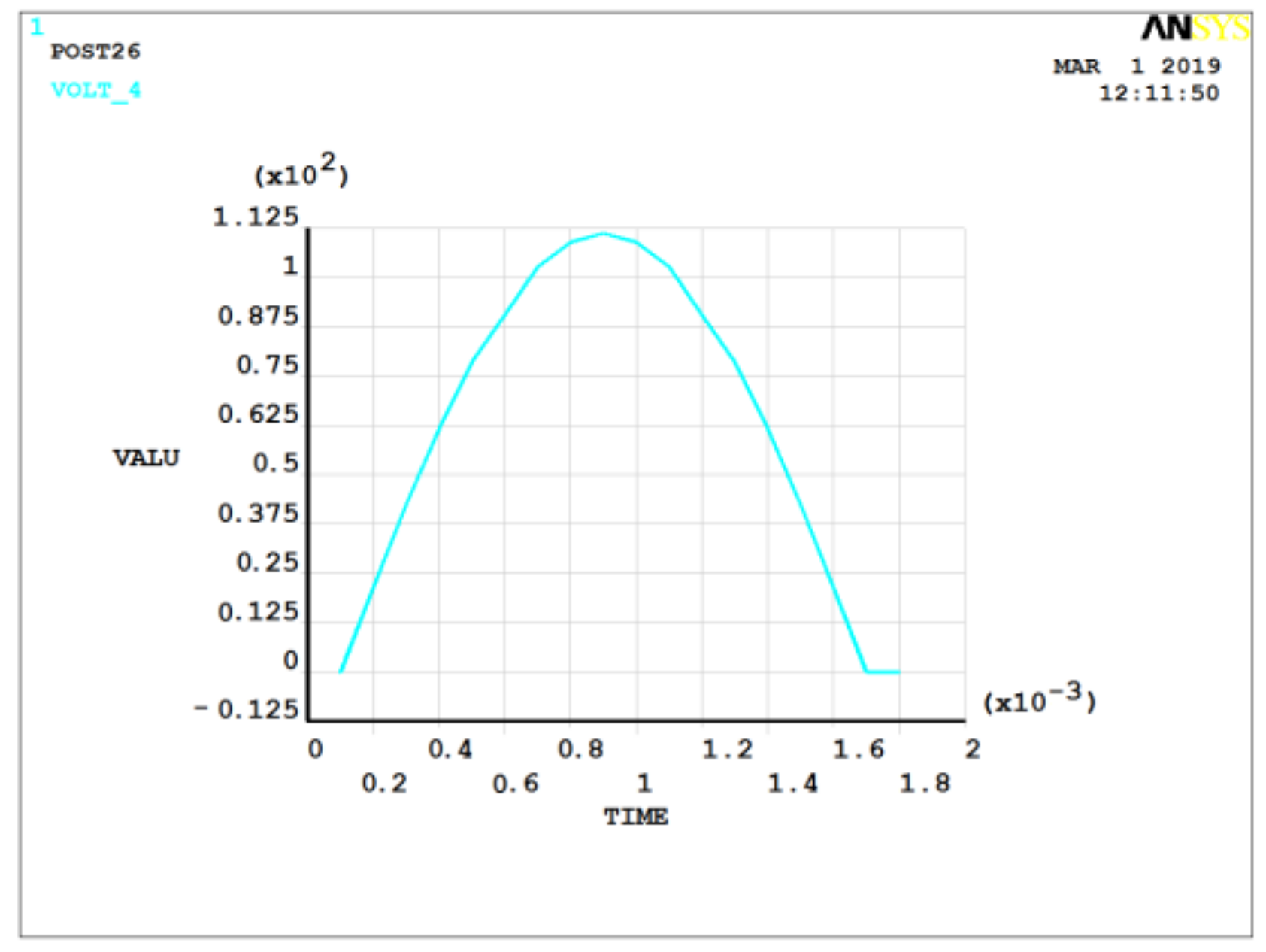
3. ANSYS Analysis of Acceleration-Induced Effects of Piezoelectric Element
4. System Modeling and Analysis
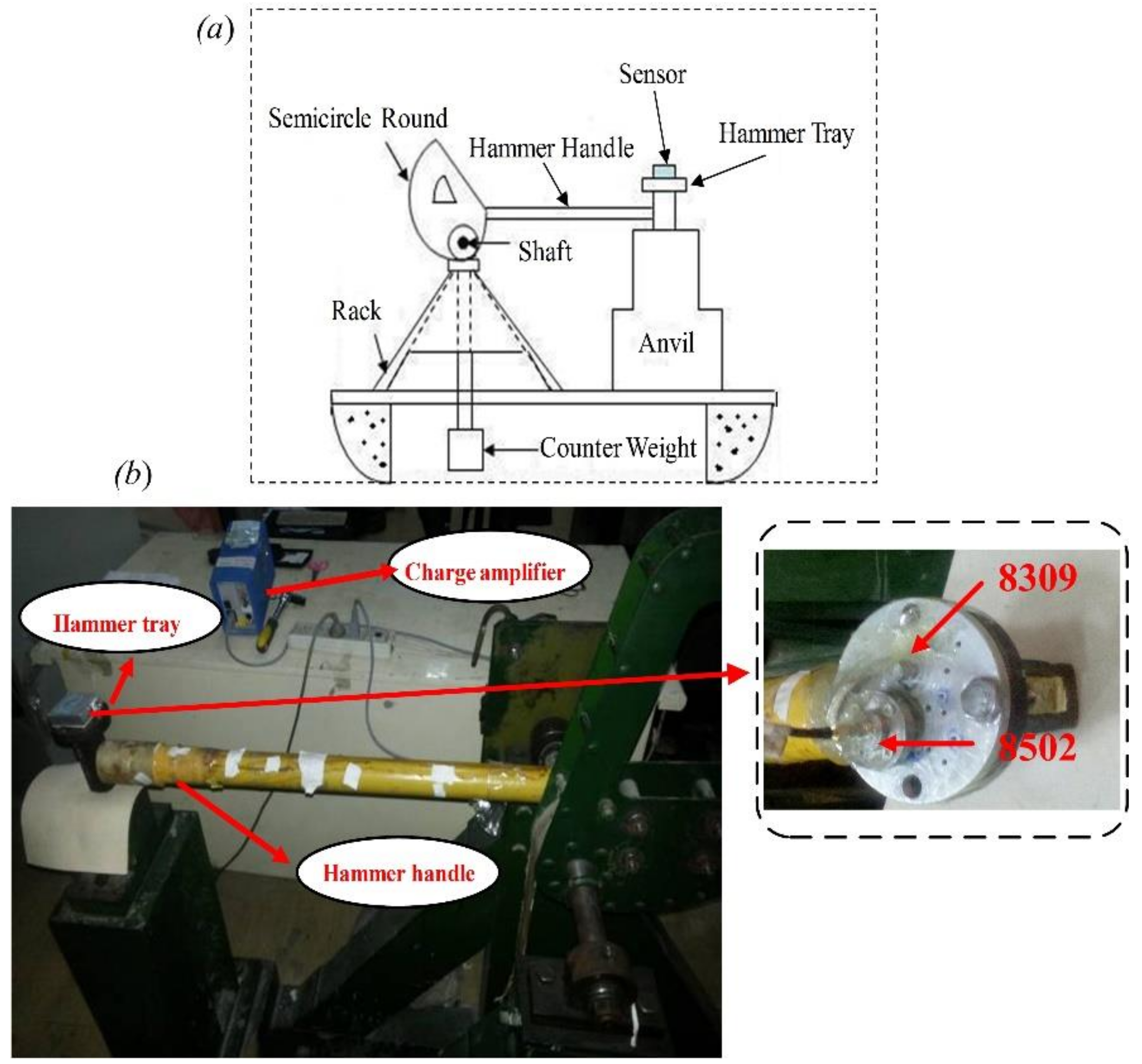
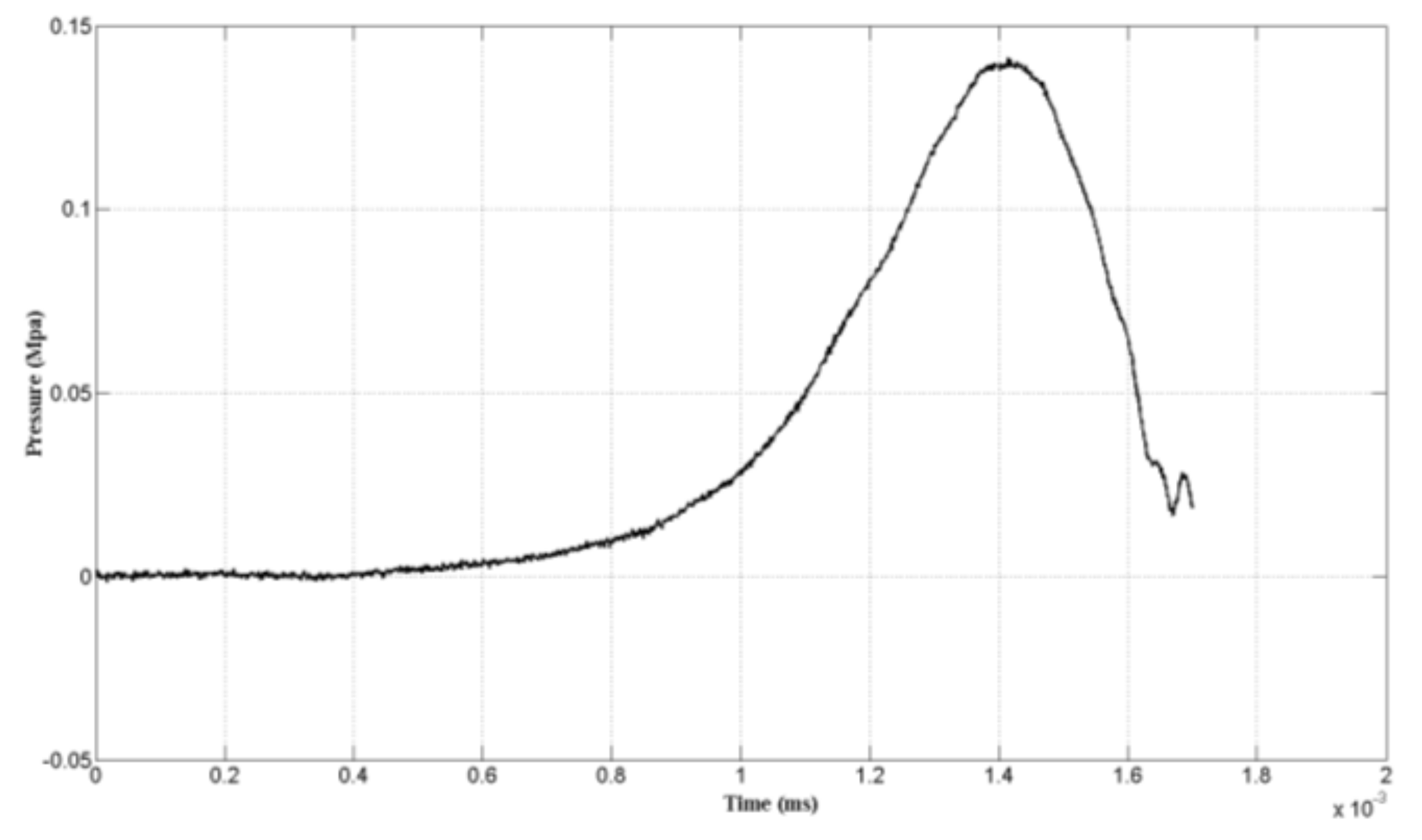
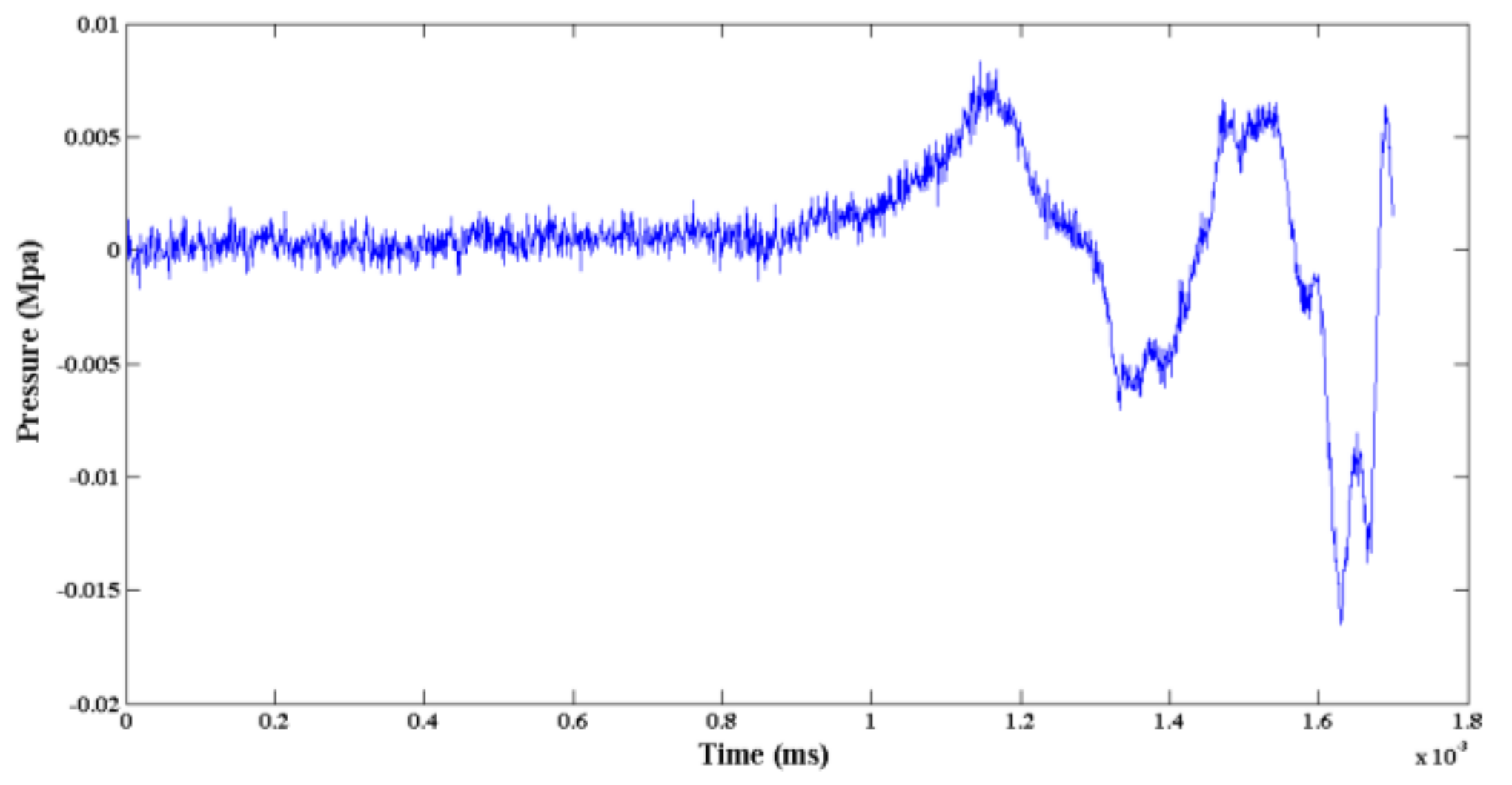
4.1. Experiments and Results
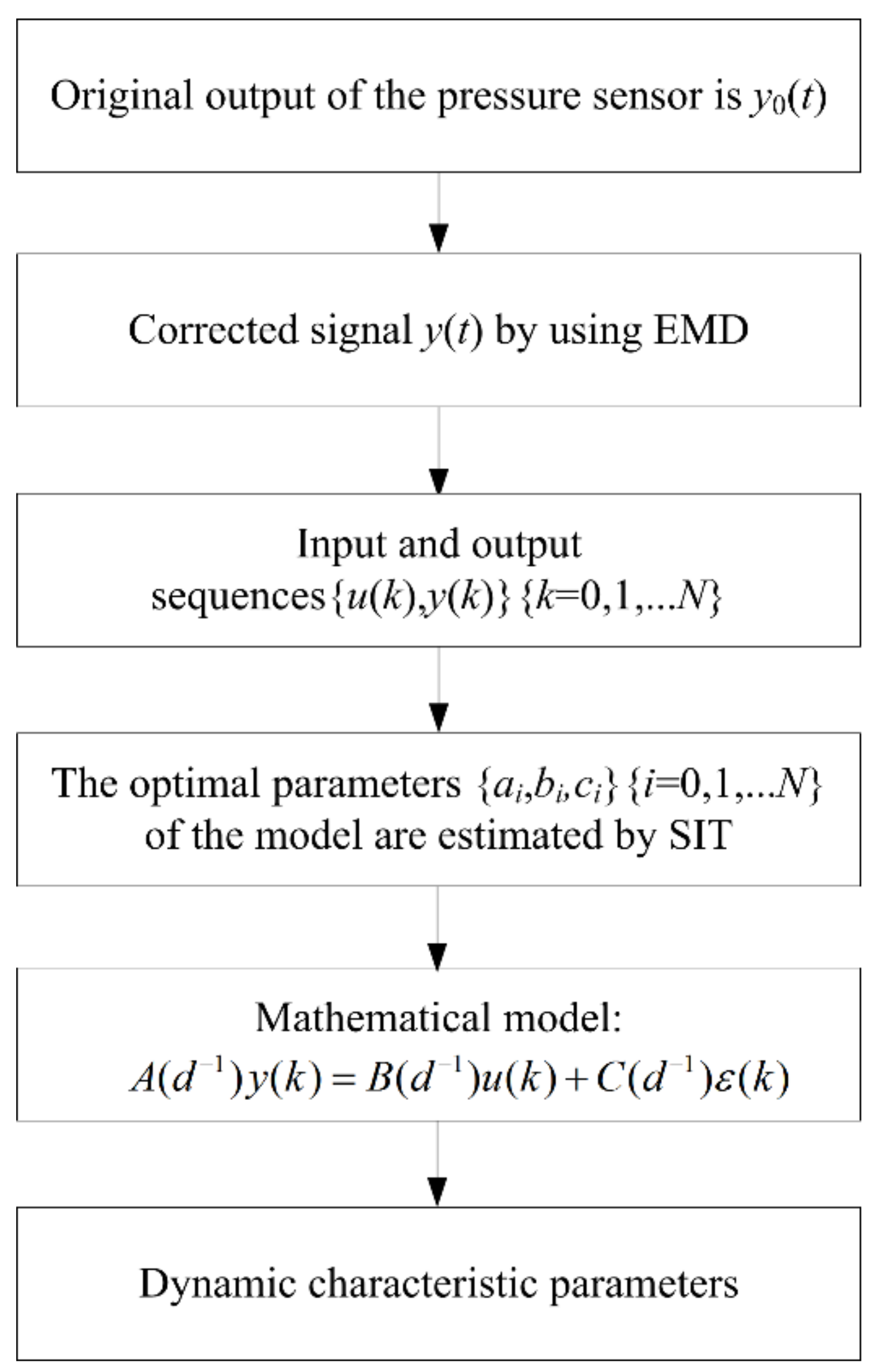
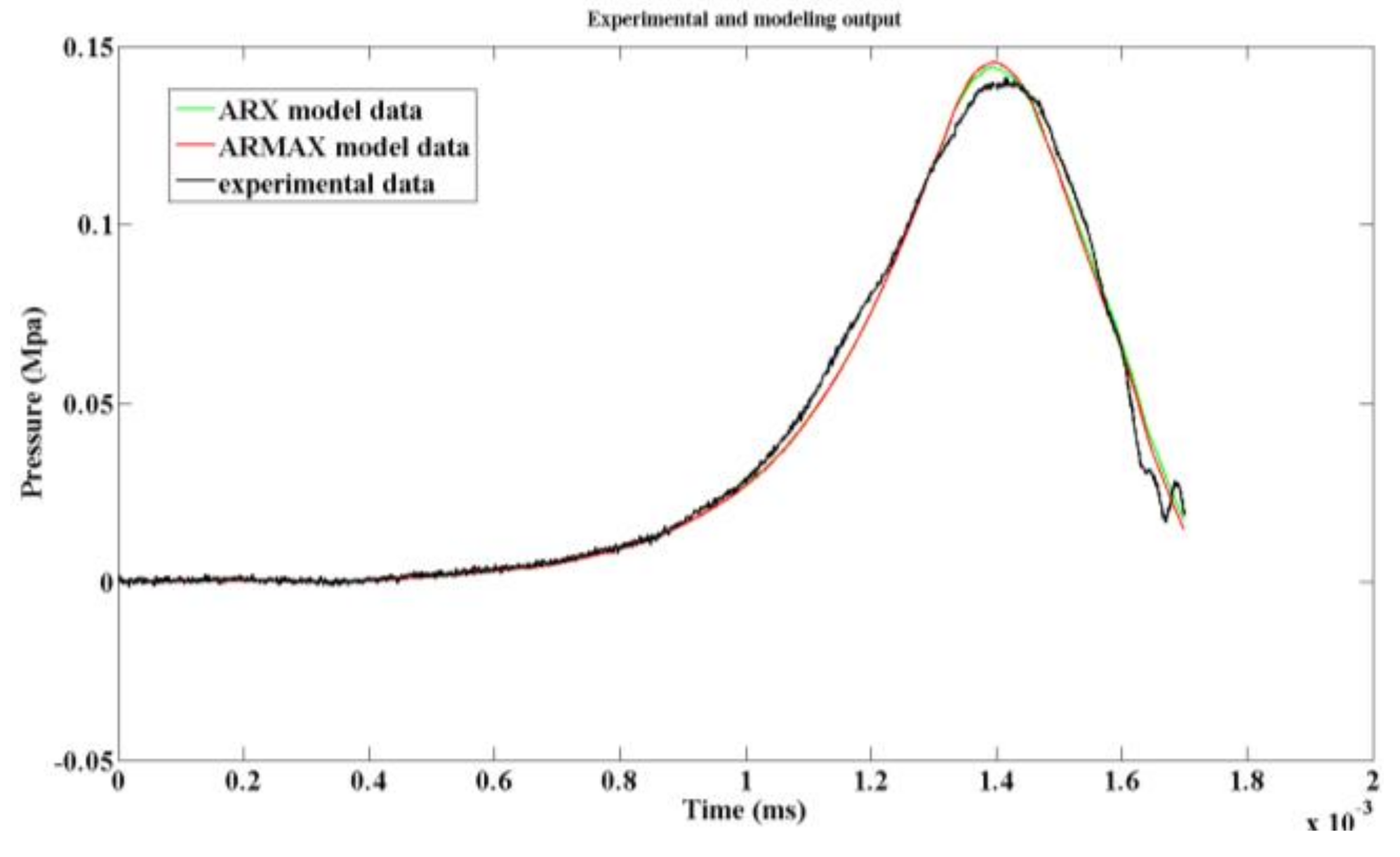
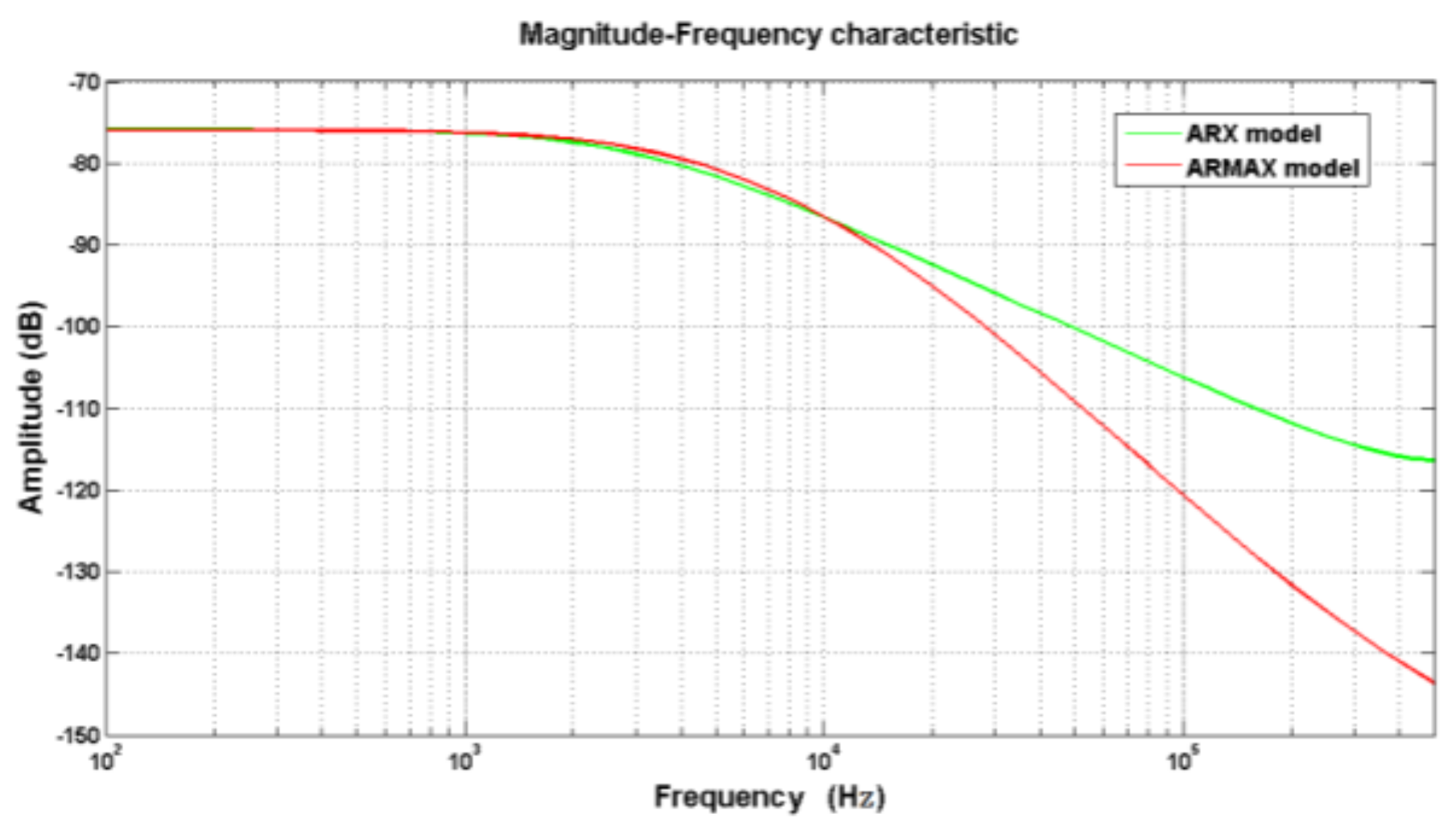
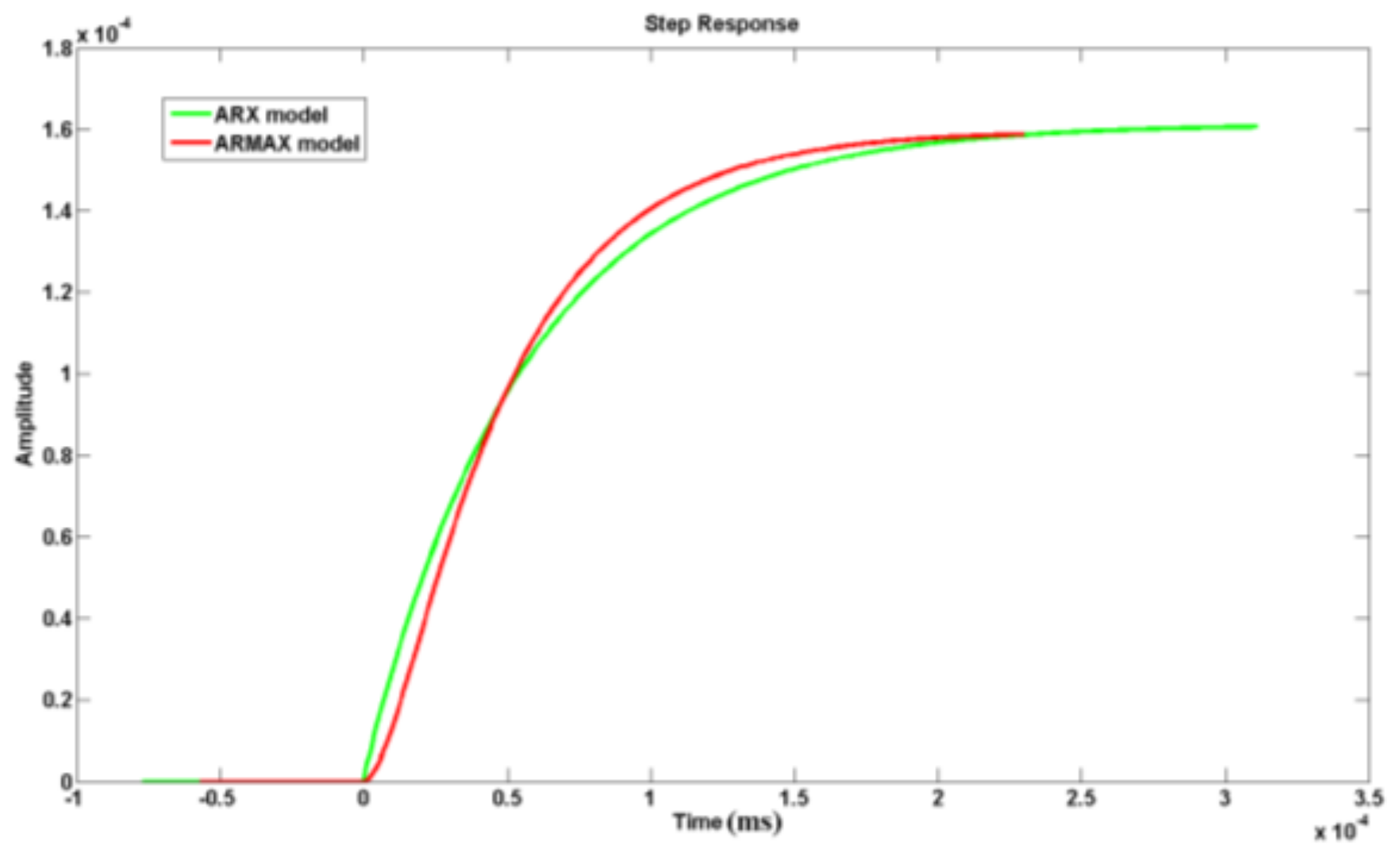
4.2. Modeling and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Patel, S.; Majumder, S.K. Prediction of transient pressure change during natural gas hydrate formation. Pet. Sci. Technol. 2018, 36, 1820–1828. [Google Scholar] [CrossRef]
- Tian, B.; Zhao, Y.L.; Niu, Z. The study of acceleration effect for piezoresistive micro pressure sensor. Appl. Mech. Mater. 2013, 455, 455–459. [Google Scholar] [CrossRef]
- Ohtani, K.; Ogawa, T. Micro-explosive-induced underwater shock wave propagation and reflection at the interface. Sci. Technol. Energy. Mater. 2015, 76, 139–143. [Google Scholar]
- Li, C.Z.; Li, D.H.; Li, J.A. Research on transverse sensitivity property of cymbal piezoelectric vibration acceleration sensor. Adv. Mater. Res. 2011, 303, 1495–1500. [Google Scholar] [CrossRef]
- Zhu, M.W. Dynamic characteristics of active acceleration-compensated piezoelectric pressure sensors. Metrol. Meas. Technol. 2012, 32, 73–77. [Google Scholar]
- Dang, X.H.; Ebert, I. Active acceleration compensation for transport vehicles carrying delicate objects. IEEE Trans. Robot. Autom. 2004, 20, 830–839. [Google Scholar] [CrossRef]
- Yang, H.; Shen, D.W.; Zu, J. The Acceleration effect and calibration method of pressure sensor in the test of pressure on the bottom of the projectile. Chin. J. Sens. Actuators 2011, 24, 1256–1259. [Google Scholar]
- Zu, J.; Ma, T.H.; Pei, D.X. New Concept Dynamic Test, 1st ed.; National Defense Industry Press: Beijing, China, 2016; pp. 191–195. ISBN 978-7-118-10775-3. [Google Scholar]
- Ren, Z.; Jia, Z.; Zhang, J.; Shang, Y.; Gao, S. Research on the dynamic error and acceleration compensation for the piezoelectric sensor. Sens. Transducers J. 2013, 153, 118–123. [Google Scholar]
- Gu, T.; Kong, D.; Jiang, J.; Shang, F.; Chen, J. Pressure prediction model based on artificial neural network optimized by genetic algorithm and its application in quasi-static calibration of piezoelectric high-pressure sensor. Rev. Sci. Instrum. 2016, 87, 86–94. [Google Scholar] [CrossRef] [PubMed]
- Mprales, A.R.R.; Zaghloul, M.E. Highly sensitive wearable piezoelectric force sensor with quasi-static load testing. IEEE Sens. J. 2018, 18, 9910–9918. [Google Scholar] [CrossRef]
- Joseph, R.P.; Wang, B.L.; Samali, B. Large deformation and strain gradient fracture analysis of double cantilever beams with piezoelectric effect. J. Eng. Mech. 2018, 144, 67–81. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, S.; Zhou, H.B. State space finite element analysis for piezoelectric precision positioning considering secondary converse piezoelectric effect. Finite Elem. Anal. Des. 2015, 102, 85–94. [Google Scholar] [CrossRef]
- He, C.; Chen, W.G. Fabrication and research and application of piezoelectric materials. J. Func. Mat. 2010, 41, 11–13. [Google Scholar]
- Kutis, V.; Dzuba, J. MEMS piezoelectric pressure sensor modeling and simulation. Procedia Eng. 2012, 48, 338–345. [Google Scholar] [CrossRef]
- Lu, F.; Lee, H.P.; Lu, P.; Lim, S.P. Finite element analysis of interference for the laterally coupled quartz crystal microbalances. Sens. Actuators A-Phys. 2005, 119, 90–99. [Google Scholar] [CrossRef]
- Tian, B. Micro pressure sensor dynamic performance analysis. Sens. Rev. 2014, 34, 367–373. [Google Scholar] [CrossRef]
- Matko, V.; Jezernik, K. Greatly improved small inductance measurement using quartz crystal parasitic capacitance compensation. Sensors 2010, 10, 3954–3960. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.J.; Shi, Y.B.; Tang, J. Performance testing of a high range accelerometer. Chin. J. Sens. Actuators 2013, 26, 834–847. [Google Scholar]
- Chang, H.; Tzenog, P.K. Analysis of the dynamic characteristics of pressure sensors using ARX system identification. Sens. Actuators A-Phys. 2013, 141, 367–375. [Google Scholar] [CrossRef]
- Yao, Z.; Wang, Z.; Forrest, J.Y.; Wang, Q.; Lv, J. Empirical mode decomposition-adaptive least squares method for dynamic calibration of pressure sensors. Meas. Sci. Technol. 2018, 28, 1–9. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Z.; Hao, X.; Cheng, H. Dynamic calibration method of temperature sensor based on Quasi-δ pulse temperature excitation. Microw. Opt. Technol. Lett. 2018, 60, 212–219. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| d11 (10−12 C/N) | e11 (C/m2) | g11 (m2/C) | h11 (109 N/C) | s11 (10−12 m2/N) |
|---|---|---|---|---|
| 2.31 | 0.171 | 0.0578 | 4.36 | 12.77 |
| No. | Acceleration (g) | Pulse Width (ms) | Output Charge (pC) | Maximum Pressure (MPa) | Mode of Sensor | |
|---|---|---|---|---|---|---|
| 1 | One layer of felt pad | 380.9 | 1.504 | 6.62 | 0.07 | normal |
| 2 | 500.6 | 1.423 | 8.42 | 0.089 | normal | |
| 3 | 699.3 | 1.275 | 10.41 | 0.11 | normal | |
| 4 | 1080 | 1.044 | 15.80 | 0.167 | normal | |
| 5 | 1963 | 0.989 | 18.28 | 0.1932 | normal | |
| 6 | Two layers of felt pad | 180.4 | 2.936 | 3.88 | 0.041 | normal |
| 7 | 519.7 | 1.525 | 8.14 | 0.086 | normal | |
| 8 | 672.5 | 1.327 | 10.29 | 0.1087 | normal | |
| 9 | 1006 | 1.13 | 14.33 | 0.1402 | normal | |
| 10 | 2185 | 0.942 | 18.07 | 0.191 | normal | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, F.; Ma, T. Modeling and Studying Acceleration-Induced Effects of Piezoelectric Pressure Sensors Using System Identification Theory. Sensors 2019, 19, 1052. https://doi.org/10.3390/s19051052
Xu F, Ma T. Modeling and Studying Acceleration-Induced Effects of Piezoelectric Pressure Sensors Using System Identification Theory. Sensors. 2019; 19(5):1052. https://doi.org/10.3390/s19051052
Chicago/Turabian StyleXu, Fujing, and Tiehua Ma. 2019. "Modeling and Studying Acceleration-Induced Effects of Piezoelectric Pressure Sensors Using System Identification Theory" Sensors 19, no. 5: 1052. https://doi.org/10.3390/s19051052
APA StyleXu, F., & Ma, T. (2019). Modeling and Studying Acceleration-Induced Effects of Piezoelectric Pressure Sensors Using System Identification Theory. Sensors, 19(5), 1052. https://doi.org/10.3390/s19051052