Low-Cost GNSS-R Altimetry on a UAV for Water-Level Measurements at Arbitrary Times and Locations



Abstract
:
1. Introduction
2. Materials and Methods
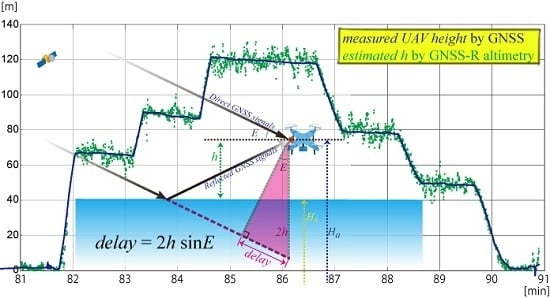
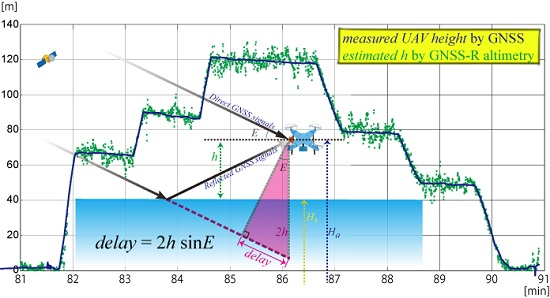
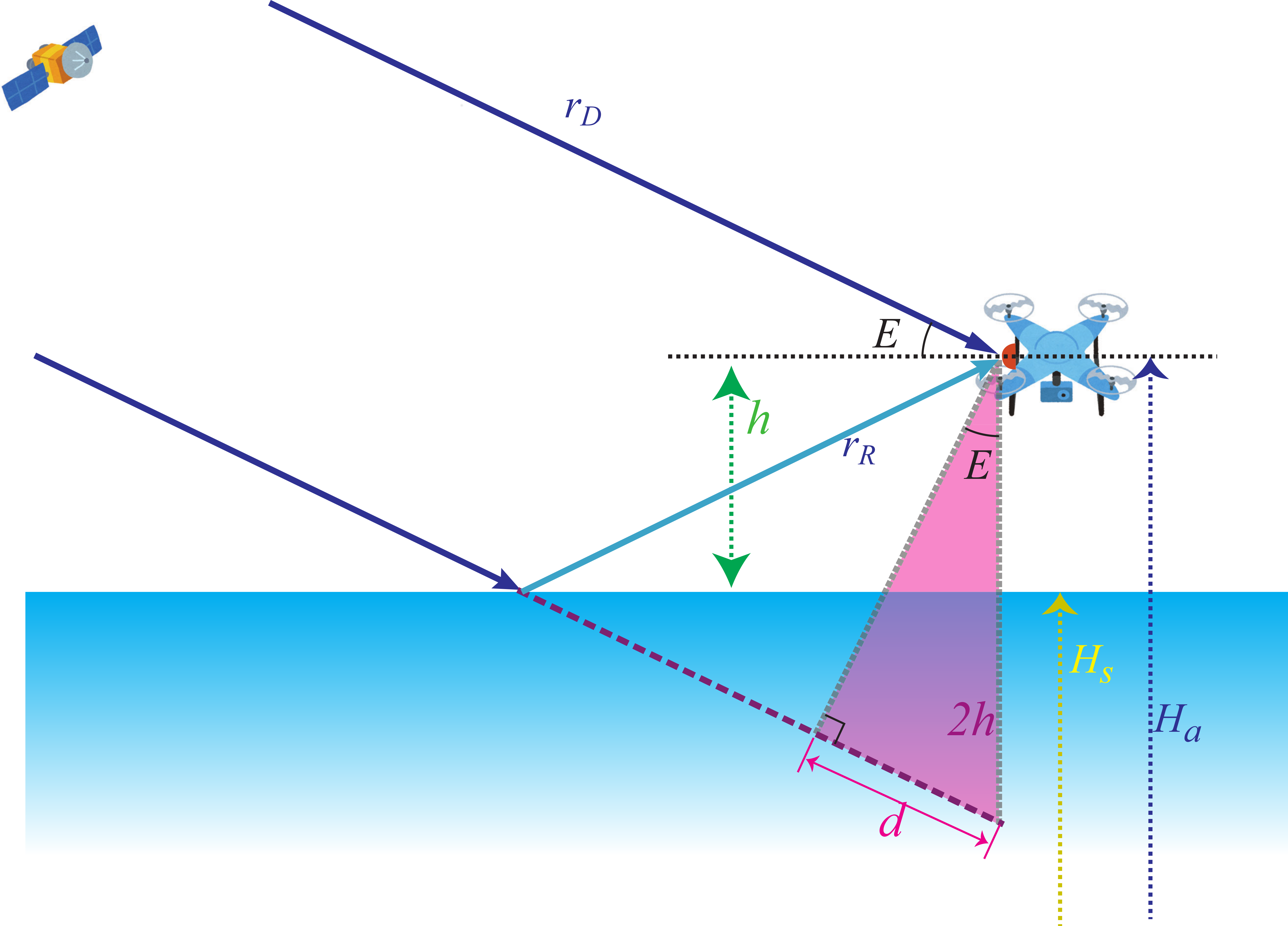
2.1. GNSS-R Altimetry Method
2.2. Experimental Equipment
2.3. Flight Experiments
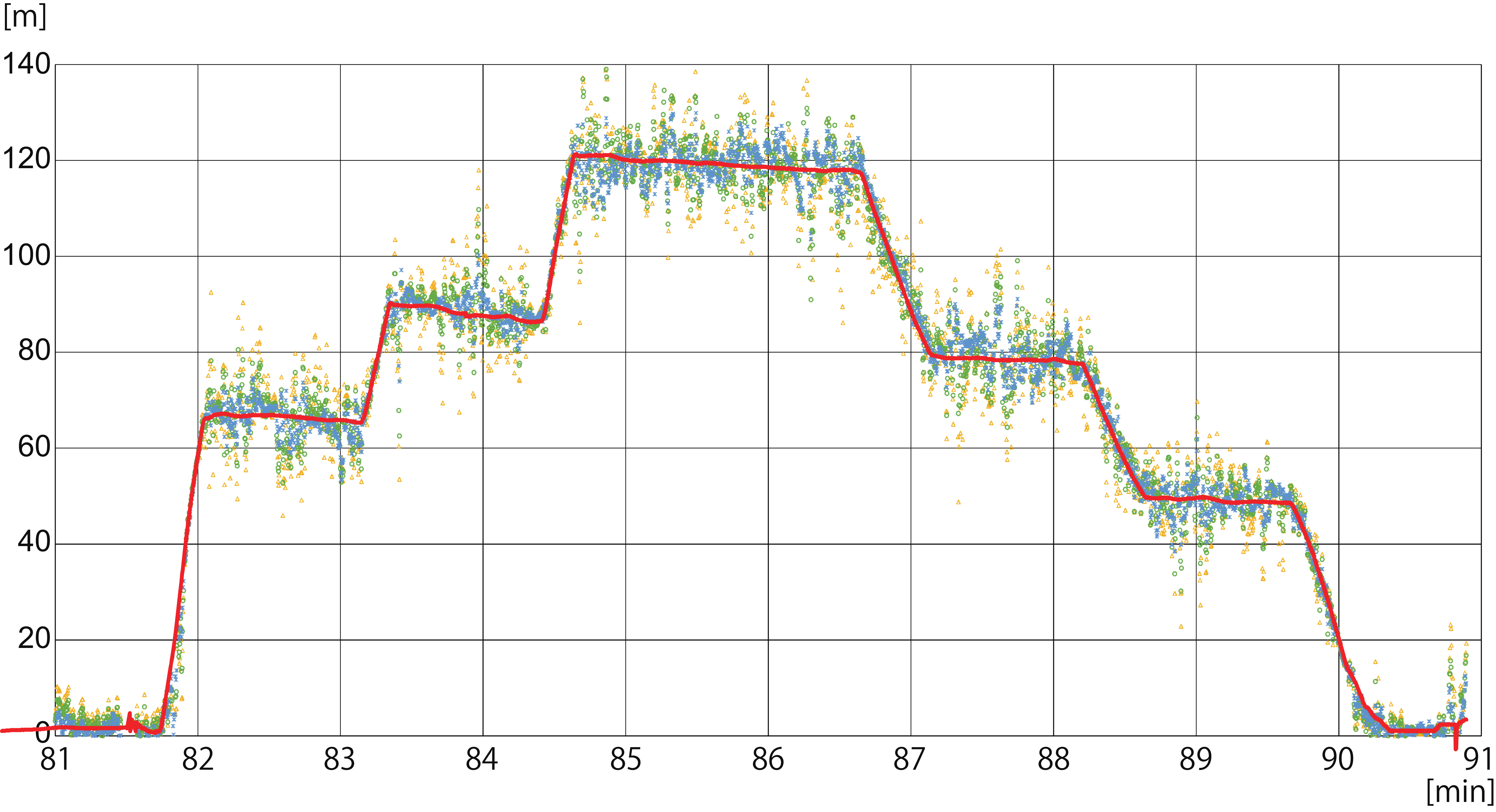
3. Results
4. Discussion
5. Summary
Author Contributions
Funding
Conflicts of Interest
References
- Fu, L.L.; Cazenave, A. Satellite Altimetry and Earth Sciences: A Handbook of Techniques and Applications; Academic Press: San Diego, CA, USA, 2001; 463p, ISBN 0-12-269545-3. [Google Scholar]
- Gommenginger, C.; Thibaut, P.; Fenoglio-Marc, L.; Quartly, G.; Deng, X.; Gomez-Enri, J.; Challenor, P.; Gao, Y. Retracking altimeter waveforms near the coasts. A review of retracking methods and some applications to coastal waveforms. In Coastal Altimetry; Vignudelli, S., Kostianoy, A.G., Cipollini, P., Benveniste, J., Eds.; Springer: Berlin, Germany, 2011; pp. 61–75. [Google Scholar]
- Passaro, M.; Cipollini, P.; Vignudeli, S.; Quartly, G.D.; Snaith, H.M. ALES: A multi-mission adaptive subwaveform retracker for coastal and open ocean altimetry. Rem. Sens. Environ. 2014, 145, 173–189. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.F.; Ichikawa, K. Coastal waveform retracing for Jason-2 altimeter data based on along-track echograms around the Tsushima Islands in Japan. Rem. Sens. 2017, 9, 762. [Google Scholar] [CrossRef]
- Fu, L.L.; Alsdorf, D.; Morrow, R.; Rodriguez, E. SWOT: The surface water and ocean topography mission. 2012. Available online: https://swot.jpl.nasa.gov/docs/SWOT_MSD_1202012.pdf (accessed on 1 December 2018).
- Nakamura, R.; Uematsu, A.; Nakajima, Y.; Yajima, Y.; Sato, R. The COMPIRA team; X-band interferometric SAR sensor for the Japanese altimetry mission COMPIRA. In Proceedings of the International Symposium on Remote Sensing 2012, International Conference on Space, Aeronautical and Navigational Electronics 2012, The SONGDO CONVENSIA (SANE2012-85), Incheon, Korea, 10–12 October 2012; pp. 163–168. [Google Scholar]
- Xu, H. Application of GPS-RTK technology in the land change survey. Procedia Eng. 2012, 29, 3454–3459. [Google Scholar] [CrossRef]
- Frappart, F.; Roussel, N.; Darrozes, J.; Bonneton, P.; Bonneton, N.; Detandt, G.; Perosanz, F.; Loyer, S. High rate GNSS measurements for detecting non-hydrostatic surface wave. Application to tidal borein the Garonne River. Eur. J. Rem. Sens. 2016, 49, 917–932. [Google Scholar] [CrossRef]
- Ichikawa, K.; Yoshikawa, Y.; Morimoto, A.; Fukudome, K.; Yoon, J.H. Complementary remote sensing observations of the Tsushima warm current patterns. In Remote Sensing of the Asian Seas; Barale, V., Gade, M., Eds.; Springer International Publishing: Berlin, Germany, 2019; pp. 191–204. [Google Scholar] [CrossRef]
- Lowe, S.T.; Zuffada, C.; Chao, Y.; Kroger, P.; Young, L.E.; LaBrecque, J.L. 5-cm-Precision aircraft ocean altimetry using GPS reflections. Geophys. Res. Lett. 2002, 29, 1375. [Google Scholar] [CrossRef]
- Martín-Neira, M. A passive reflectometry and interferometry system (PARIS): Application to ocean altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Ruffini, G.; Germain, O.; Soulat, F.; Taani, M.; Caparrini, M. GNSS-R: Operational Applications; Workshop on Oceanography with GNSS Reflections: Barcelona, Spain, 2003; pp. 1–10. [Google Scholar]
- Roussel, N.; Frappart, F.; Ramillien, G.; Darrozes, J.; Desjardins, C.; Gegout, P.; Perosanz, F.; Biancale, R. Simulations of direct and reflected wave trajectories for ground-based GNSS-R experiments. Geosci. Mod. Dev. 2014, 7, 2261–2279. [Google Scholar] [CrossRef] [Green Version]
- Lestarquit, L.; Peyrezabes, M.; Darrozes, J.; Motte, E.; Boussel, N.; Wautelet, G.; Frappart, F.; Ramillen, G.; Biancale, R.; Zribi, M. Reflectometry with an open-source software GNSS receiver: Use case with carrier phase altimetry. IEEE J. Sel. Topics Appl. Earth Obs. Rem. Sens. 2016. [Google Scholar] [CrossRef]
- Löfgren, J.S.; Haas, R.; Johansson, J.M. Monitoring coastal sea level using reflected GNSS signals. Adv. Space Res. 2011, 47, 213–220. [Google Scholar] [CrossRef] [Green Version]
- Larson, K.M.; Löfgren, J.S.; Haas, R. Coastal sea level measurements using a single geodetic GPS receiver. J. Adv. Space Res. 2012. [Google Scholar] [CrossRef]
- Roussel, N.; Darrozes, J.; Ha, C.; Boniface, K.; Frappart, F.; Ramillien, G.; Gavart, M.; Van de Vyvere, L.; Desenfans, O.; Baup, F. Multi-scale volumetric soil moisture detection from GNSS SNR data, Ground-based and airborne applications. In Proceedings of the IEEE Metrology for Aerospace (MetroAeroSpace), Florence, Italy, 22–23 June 2016; pp. 573–578. [Google Scholar]
- RTKLIB: An Open Source Program Package for GNSS Positioning. Available online: http://www.rtklib.com/ (accessed on 1 December 2018).
- McHugh, C.R.; Church, I.; Kim, M.; Maggio, D. Comparison of horizontal and vertical resolvable resolution between repetitive multi-beam surveys using different kinematic GNSS methods. Int. Hydrogr. Rev. 2015, 14, 7–18. [Google Scholar]
- Choi, S.H.; Lin, C.H. Preliminary study of UAS equipped with thermal camera for volcanic geothermal monitoring in Taiwan. Sensors 2017, 17, 1649. [Google Scholar] [CrossRef] [PubMed]
- Roussel, N.; Ramillien, G.; Frappart, F.; Darrozes, J.; Gay, A.; Biancale, R.; Striebig, N.; Hanquez, V.; Bertin, X.; Allain, D. Sea level monitoring and sea state estimate using a single geodetic receiver. Rem. Sens. Env. 2015, 171, 261–277. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First Flight | Second Flight | ||||||
|---|---|---|---|---|---|---|---|
| Weight Function | |||||||
| (a) All (above 10 m) | Number | 2005 | 2499 | ||||
| Mean diff. [m] | −2.78 | −2.37 | −0.98 | −0.72 | −0.60 | −0.37 | |
| Rms diff. [m] | 3.81 | 3.98 | 8.09 | 3.32 | 4.98 | 7.11 | |
| Mean | 3.95 | 1.87 | 2.00 | 3.99 | 2.14 | 4.56 | |
| (b) High altitude (above 100 m) | Number | 1234 | 706 | ||||
| Mean diff. [m] | −3.35 | −3.13 | −2.23 | −0.68 | −0.38 | −0.02 | |
| Rms diff. [m] | 4.43 | 4.40 | 8.80 | 3.73 | 5.37 | 7.22 | |
| Mean | 3.93 | 1.87 | 2.01 | 3.98 | 2.14 | 4.61 | |
| (c) Low altitude (10 m–60 m) | Number | 497 | 565 | ||||
| Mean diff. [m] | −1.27 | −0.46 | 2.14 | −0.03 | 0.21 | 0.51 | |
| Rms diff. [m] | 2.05 | 2.50 | 5.52 | 3.27 | 4.83 | 6.66 | |
| Mean | 4.00 | 1.86 | 1.96 | 4.00 | 2.11 | 4.22 | |
| First Flight | Second Flight | ||||||
|---|---|---|---|---|---|---|---|
| Weight function | |||||||
| (a) All (above 10 m) | Number | 2005 | 2499 | ||||
| Mean diff. [m] | −1.62 | −3.82 | −8.94 | −0.02 | −1.57 | −3.91 | |
| Rms diff. [m] | 4.43 | 5.11 | 17.33 | 3.07 | 5.24 | 7.65 | |
| Mean | 4.87 | 1.87 | 2.00 | 4.95 | 2.81 | 5.23 | |
| (b) High altitude (above 100 m) | Number | 1234 | 706 | ||||
| Mean diff. [m] | −2.16 | −4.68 | −10.35 | −0.04 | −1.29 | −3.34 | |
| Rms diff. [m] | 5.35 | 5.89 | 21.23 | 3.63 | 5.367 | 8.64 | |
| Mean | 4.80 | 2.48 | 2.60 | 4.81 | 2.72 | 5.17 | |
| (c) Low altitude (10 m−60 m) | Number | 497 | 565 | ||||
| Mean diff. [m] | −0.46 | −1.39 | −3.78 | 0.37 | −0.28 | −1.54 | |
| Rms diff. [m] | 2.06 | 2.52 | 5.44 | 2.90 | 5.26 | 7.46 | |
| Mean | 5.00 | 2.56 | 2.65 | 5.00 | 2.81 | 4.90 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ichikawa, K.; Ebinuma, T.; Konda, M.; Yufu, K. Low-Cost GNSS-R Altimetry on a UAV for Water-Level Measurements at Arbitrary Times and Locations. Sensors 2019, 19, 998. https://doi.org/10.3390/s19050998
Ichikawa K, Ebinuma T, Konda M, Yufu K. Low-Cost GNSS-R Altimetry on a UAV for Water-Level Measurements at Arbitrary Times and Locations. Sensors. 2019; 19(5):998. https://doi.org/10.3390/s19050998
Chicago/Turabian StyleIchikawa, Kaoru, Takuji Ebinuma, Masanori Konda, and Kei Yufu. 2019. "Low-Cost GNSS-R Altimetry on a UAV for Water-Level Measurements at Arbitrary Times and Locations" Sensors 19, no. 5: 998. https://doi.org/10.3390/s19050998
APA StyleIchikawa, K., Ebinuma, T., Konda, M., & Yufu, K. (2019). Low-Cost GNSS-R Altimetry on a UAV for Water-Level Measurements at Arbitrary Times and Locations. Sensors, 19(5), 998. https://doi.org/10.3390/s19050998