Specific Direction-Based Outlier Detection Approach for GNSS Vector Networks


Abstract
:1. Introduction
2. Methodology
2.1. Traditional Outlier Detection Approach for GNSS Vector Observations
2.2. Specific Direction-Based (SD) Approach for GNSS Vector Observations
2.2.1. Outlier Detection in SD Approach
2.2.2. Outlier Elimination in SD Approach
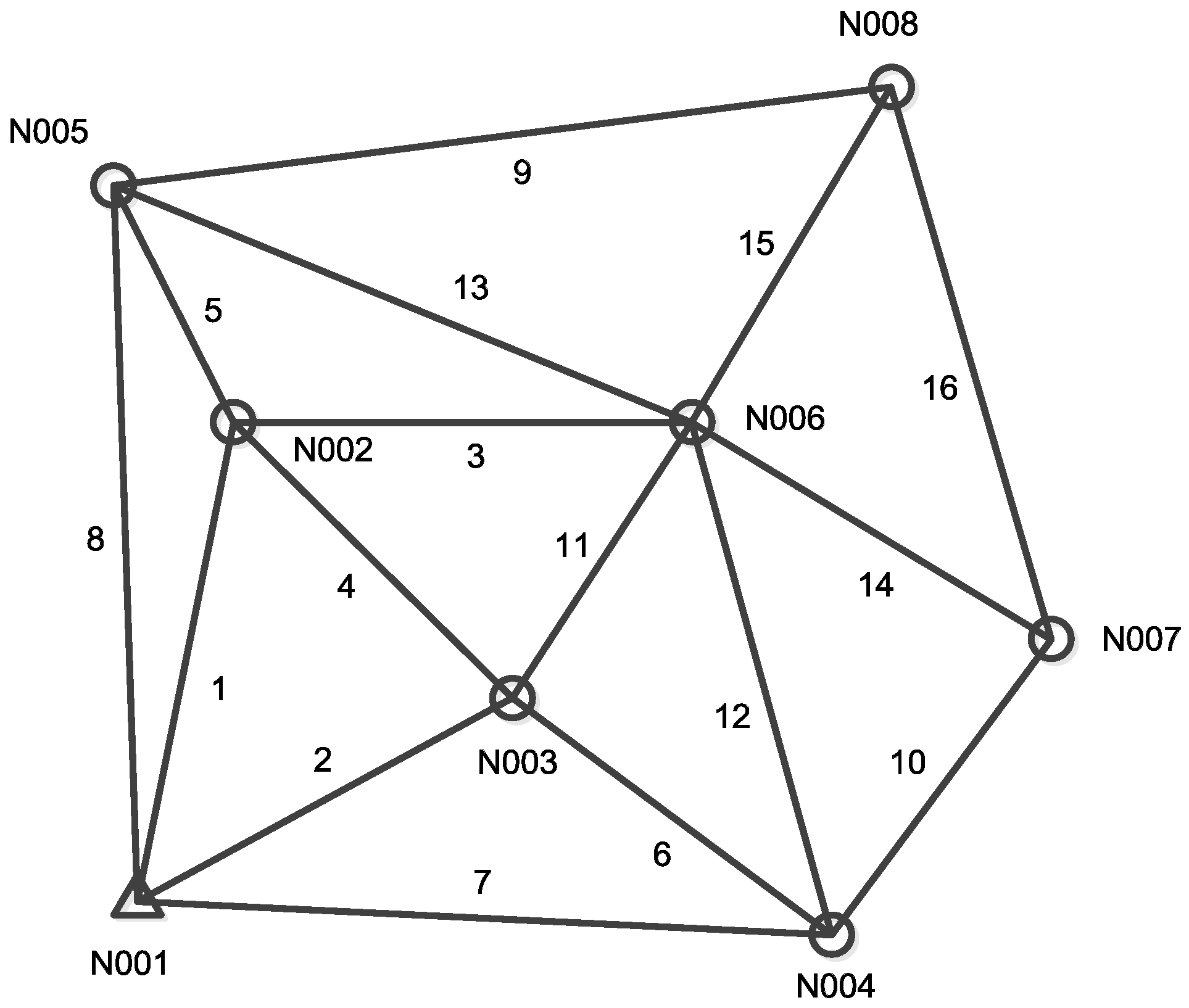
3. Outlier Detection and Elimination for Real GNSS Network
3.1. Data Description
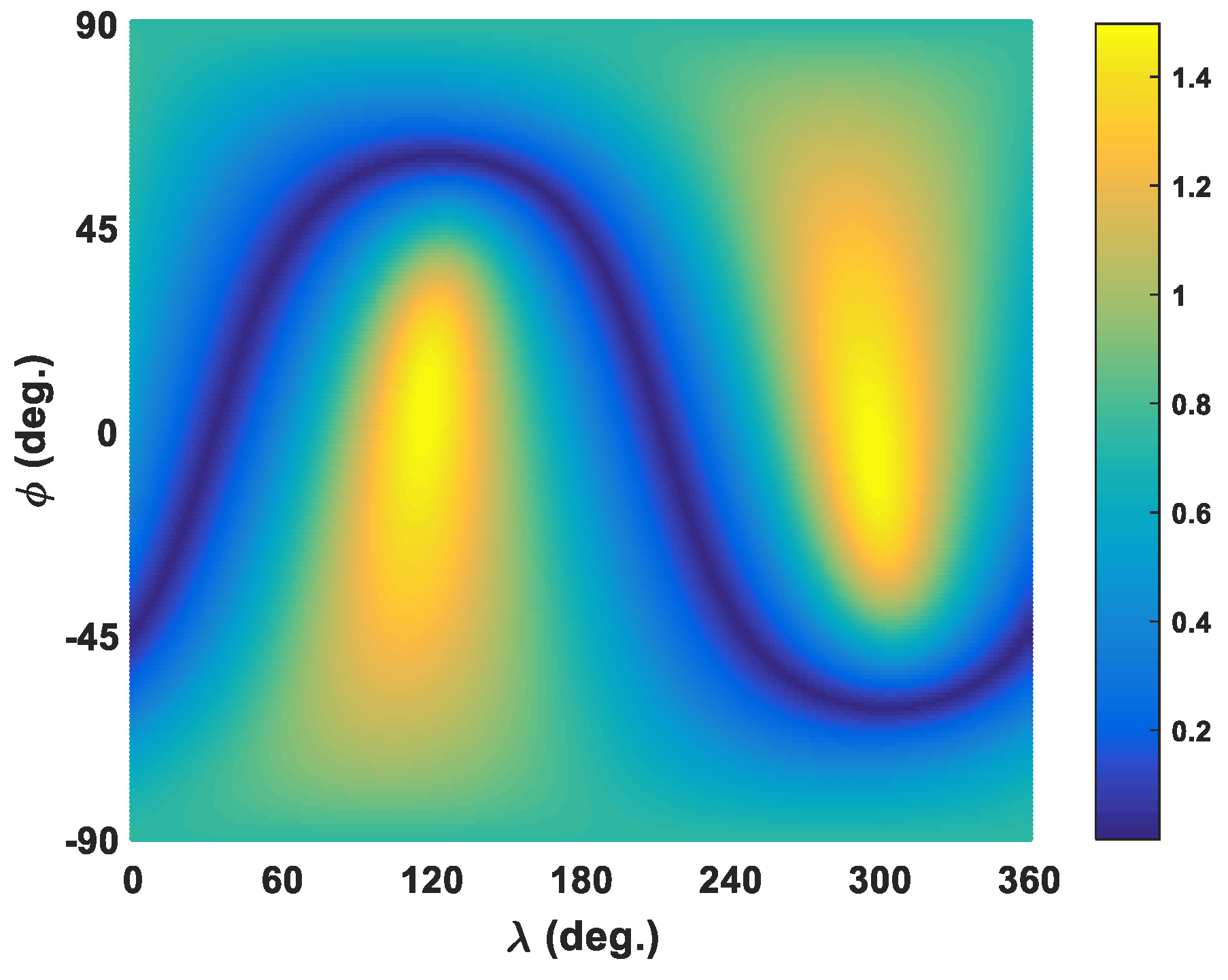
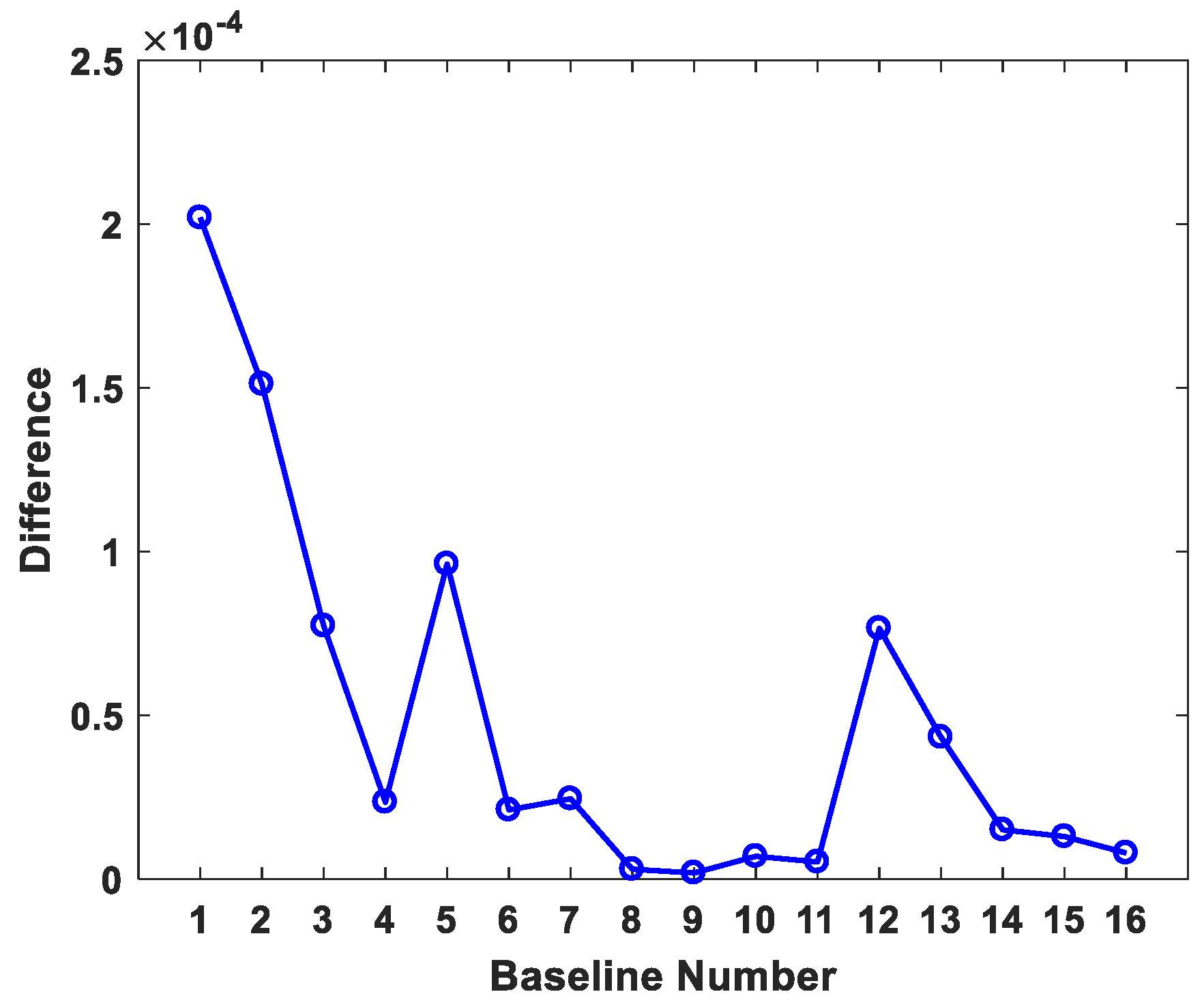
3.2. Specific Direction Validation
3.3. Outlier Detection
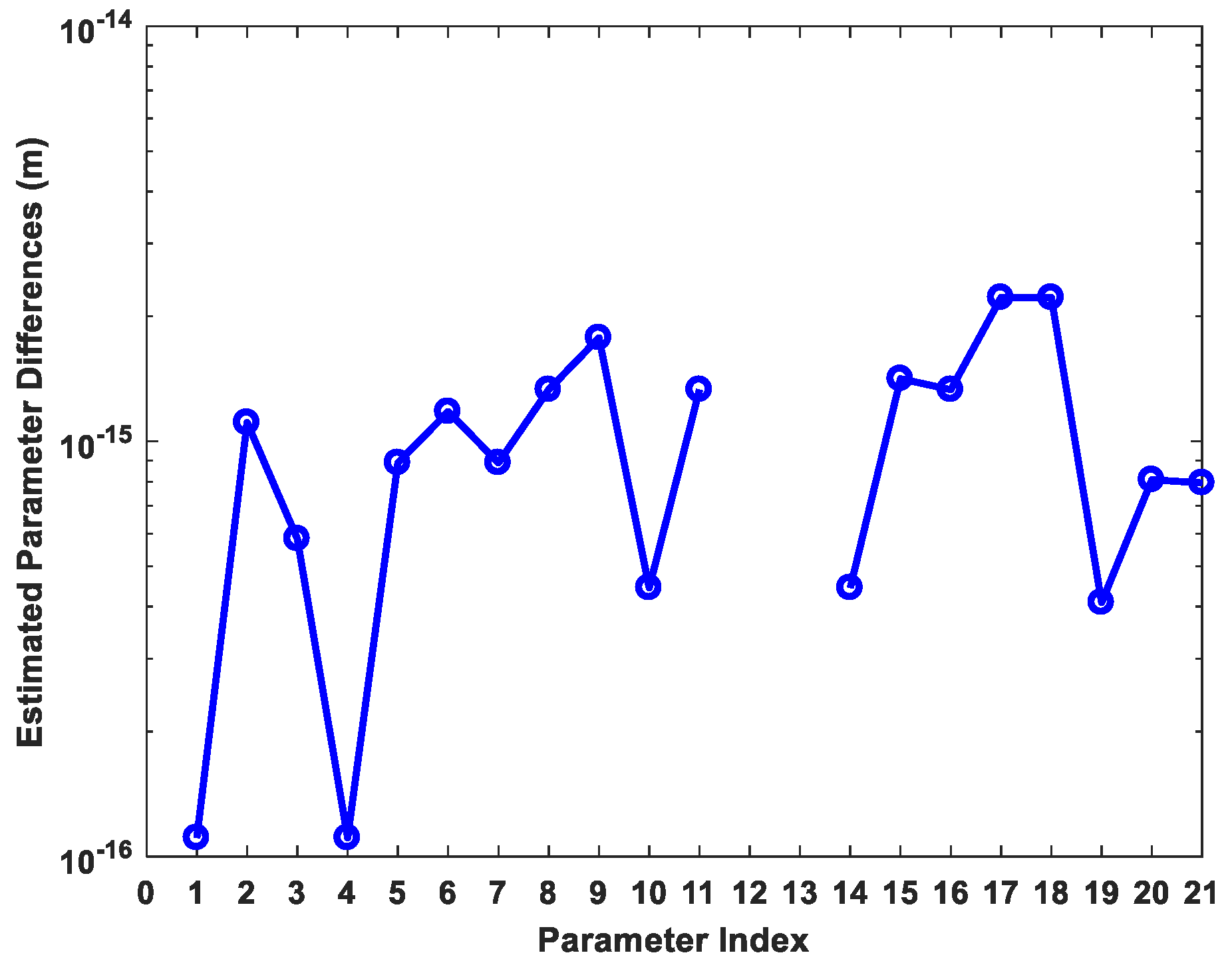
3.4. Outlier Elimination
4. Simulation Analysis for Detecting Abnormal GNSS Antenna Height Measurements
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bl.Num | Sta.Po | End.Po | Covariance Matrix () | |||||
|---|---|---|---|---|---|---|---|---|
| 1 | N002 | N001 | 1.5616 | |||||
| −119.8880 | 516.6920 | −838.2730 | −1.2684 | 2.5332 | ||||
| −1.6092 | 1.6192 | 3.5764 | ||||||
| 2 | N003 | N001 | 415.5670 | 590.1690 | −484.3730 | 0.9704 | ||
| −0.7912 | 1.5756 | |||||||
| −0.9936 | 1.0044 | 2.2228 | ||||||
| 3 | N006 | N002 | 596.3630 | 391.2610 | −32.8650 | 0.8868 | ||
| −0.7200 | 1.5160 | |||||||
| −0.8576 | 0.9132 | 1.9000 | ||||||
| 4 | N002 | N003 | −535.4570 | −73.4720 | −353.8990 | 0.9180 | ||
| −0.8868 | 2.1596 | |||||||
| −0.2988 | 0.5916 | 0.9604 | ||||||
| 5 | N002 | N005 | 384.0890 | −50.6680 | 390.1980 | 1.0084 | ||
| −0.9792 | 2.3960 | |||||||
| −0.3232 | 0.6472 | 1.0364 | ||||||
| 6 | N003 | N004 | −650.3260 | −135.0610 | −362.4920 | 0.6004 | ||
| −0.5796 | 1.3952 | |||||||
| −0.1932 | 0.3832 | 0.6248 | ||||||
| 7 | N004 | N001 | 1065.8940 | 725.2290 | −121.8830 | 1.1984 | ||
| −1.1608 | 2.7032 | |||||||
| −0.3748 | 0.7292 | 1.1796 | ||||||
| 8 | N005 | N001 | −503.9770 | 567.3630 | −1228.4710 | 1.0196 | ||
| −0.9888 | 2.3016 | |||||||
| −0.3172 | 0.6192 | 1.0156 | ||||||
| 9 | N005 | N008 | −1137.0770 | −983.7240 | 405.9790 | 0.8212 | ||
| −0.8012 | 1.9432 | |||||||
| −0.2528 | 0.5148 | 0.8316 | ||||||
| 10 | N004 | N007 | −183.2910 | −458.9740 | 478.2180 | 1.0352 | ||
| −0.8360 | 1.4972 | |||||||
| −0.7420 | 0.9900 | 1.3932 | ||||||
| 11 | N006 | N003 | 60.9040 | 317.7860 | −386.7610 | 0.9424 | ||
| −0.7692 | 1.3572 | |||||||
| −0.6940 | 0.9112 | 1.2836 | ||||||
| 12 | N006 | N004 | −589.4240 | 182.7260 | −749.2520 | 1.1232 | ||
| −0.9152 | 1.5996 | |||||||
| −0.8368 | 1.0832 | 1.5328 | ||||||
| 13 | N006 | N005 | 980.4510 | 340.5890 | 357.3370 | 1.3940 | ||
| −1.1380 | 1.9908 | |||||||
| −1.0396 | 1.3508 | 1.9056 | ||||||
| 14 | N006 | N007 | −772.7140 | −276.2480 | −271.0350 | 1.3328 | ||
| −1.0844 | 1.8956 | |||||||
| −0.9880 | 1.2792 | 1.8108 | ||||||
| 15 | N008 | N006 | 156.6270 | 643.1340 | −763.3190 | 1.2804 | ||
| −1.0448 | 1.8336 | |||||||
| −0.9552 | 1.2444 | 1.7568 | ||||||
| 16 | N008 | N007 | −616.0870 | 366.8860 | −1034.3530 | 1.4576 | ||
| −1.1908 | 2.1180 | |||||||
| −1.0624 | 1.4064 | 1.9852 | ||||||
| Site | X (m) | Y (m) | Z (m) |
|---|---|---|---|
| N002 | −2830634.7412 | 4649557.6514 | 3313013.3268 |
| N003 | −2831170.1980 | 4649484.1773 | 3312659.4277 |
| N004 | −2831820.5247 | 4649349.1166 | 3312296.9360 |
| N005 | −2830250.6519 | 4649506.9812 | 3313403.5257 |
| N006 | −2831231.1022 | 4649166.3910 | 3313046.1886 |
| N007 | −2832003.8159 | 4648890.1427 | 3312775.1536 |
| N008 | −2831387.7286 | 4648523.2565 | 3313809.5059 |
References
- Hawkins, D.M. Identification of Outliers; Chapman and Hall: London, UK, 1980; Volume 11. [Google Scholar]
- Hampel, F.R.; Ronchetti, E.M.; Rousseeuw, P.J.; Stahel, W.A. Robust Statistics: The Approach Based on Influence Functions; John Wiley & Sons: New York, NY, USA, 1986; pp. 307–341. [Google Scholar]
- Hekimoglu, S.; Erdogan, B.; Soycan, M.; Durdag, U.M. Univariate approach for detecting outliers in geodetic networks. J. Surv. Eng. 2014, 140. [Google Scholar] [CrossRef]
- Baarda, W. A Testing Procedure for Use in Geodetic Networks; Netherland Geodetic Commission: Delft, Switzerland, 1968; Volume 2, ISBN-13 9789061322092, ISBN-10 906132209X. [Google Scholar]
- Pope, A.J. The Statistics of Residuals and the Detection of Outliers; NOS 65, NGS 1; NOAA technical report; NOAA NOS: Rockville, MD, USA, 1976.
- Koch, K.R. Parameter Estimation and Hypothesis Testing in Linear Models, 2nd ed.; Springer-Verlag: Berlin, Germany, 1999. [Google Scholar]
- Teunissen, P.J.G. Testing Theory: An Introduction, 2nd ed.; Delft University Press: Delft, The Netherlands, 2006. [Google Scholar]
- Lehmann, R. Improved critical values for extreme normalized and studentized residuals in Gauss-Markov models. J. Geod. 2012, 86, 1137–1146. [Google Scholar] [CrossRef]
- Lehmann, R. On the formulation of the alternative hypothesis for geodetic outlier detection. J. Geod. 2013, 87, 373–386. [Google Scholar] [CrossRef]
- Koch, K.R. Deviations from the null-hypothesis to be detected by statistical tests. Bull. Géod. 1981, 55, 41–48. [Google Scholar] [CrossRef]
- Prószyñski, W. On outlier-hiding effects in specific Gauss-Markov models: Geodetic examples. J. Geod. 2000, 74, 581–589. [Google Scholar] [CrossRef]
- Gökalp, E.; Güngör, O.; Boz, Y. Evaluation of different outlier detection methods for GPS networks. Sensors 2008, 8, 7344–7358. [Google Scholar] [CrossRef]
- Gui, Q.; Li, X.; Gong, Y.; Li, B.; Li, G. A Bayesian unmasking method for locating multiple gross errors based on posterior probabilities of classification variables. J. Geod. 2011, 85, 191–203. [Google Scholar] [CrossRef]
- Knight, N.L.; Wang, J.; Rizos, C. Generalised measures of reliability for multiple outliers. J. Geod. 2010, 84, 625–635. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Wang, J.; Knight, N.L.; Shen, Y. Outlier separability analysis with a multiple alternative. J. Geod. 2013, 87, 591–604. [Google Scholar] [CrossRef]
- Wang, J.; Chen, Y. On the reliability measure of observations. Acta Geod. Cartogr. Sin. 1994, 4, 42–51. [Google Scholar]
- Li, D.; Yuan, X. Error Processing and Reliability Theory, 2nd ed.; The Publishing House of Wuhan University: Wuhan, China, 2002. (In Chinese) [Google Scholar]
- Prószyñski, W. Criteria for internal reliability of linear least squares models. Bull. Géod. 1994, 68, 161–167. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Minimal detectable biases of GPS data. J. Geod. 1998, 72, 236–244. [Google Scholar] [CrossRef]
- Koch, K.R. Minimal detectable outliers as measures of reliability. J. Geod. 2015, 89, 483–490. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Distributional theory for the DIA method. J. Geod. 2018, 92, 59–80. [Google Scholar] [CrossRef]
- Huber, P.J. Robust Statistics; John Wiley & Sons: New York, NY, USA, 1981. [Google Scholar]
- Yang, Y.; Song, L.; Xu, T. Robust estimator for correlated observations based on bifactor equivalent weights. J. Geod. 2002, 76, 353–358. [Google Scholar] [CrossRef]
- Guo, J.; Ou, J.; Wang, H. Robust estimation for correlated observations: Two local sensitivity-based downweighting strategies. J. Geod. 2010, 84, 243–250. [Google Scholar] [CrossRef]
- Koch, K.R. Robust estimation by expectation maximization algorithm. J. Geod. 2013, 87, 107–116. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Kleusberg, A. GPS for Geodesy, 2nd ed.; Springer: Berlin, Germany, 1998. [Google Scholar]
- Teunissen, P.J.G.; Montenbruck, O. Handbook of Global Navigation Satellite Systems; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Kutterer, H. Quality aspects of a GPS reference network in Antarctica-A simulation study. J. Geod. 1998, 72, 51–63. [Google Scholar] [CrossRef]
- Even-Tzur, G. GPS vector configuration design for monitoring deformation networks. J. Geod. 2002, 76, 455–461. [Google Scholar] [CrossRef]
- Even-Tzur, G. More on sensitivity of a geodetic monitoring network. J. Appl. Geod. 2010, 4, 55–59. [Google Scholar] [CrossRef]
- Wu, J.; Chen, Y. Improvement of the separability of survey scheme for monitoring crustal deformations in the area of an active fault. J. Geod. 2002, 76, 77–81. [Google Scholar] [CrossRef]
- Wieser, A. Reliability checking for GNSS baseline and network processing. GPS Solut. 2004, 8, 55–66. [Google Scholar] [CrossRef]
- Aydin, C. Power of global test in deformation analysis. J. Surv. Eng. 2012, 138, 51–56. [Google Scholar] [CrossRef]
- Snow, K.B.; Schaffrin, B. Three-dimensional outlier detection for GPS networks and their densification via the BLIMPBE approach. GPS Solut. 2013, 7, 130–139. [Google Scholar] [CrossRef]
- Even-Tzur, G. Graph theory applications to GPS networks. GPS Solut. 2001, 5, 31–38. [Google Scholar] [CrossRef]
- Even-Tzur, G.; Nawatha, M. Gross-Error Detection in GNSS Networks Using Spanning Trees. J. Surv. Eng. 2016, 142, 04016003. [Google Scholar] [CrossRef]
- Koch, I.É.; Veronez, M.R.; da Silva, R.M.; Klein, I.; Matsuoka, M.T.; Gonzaga, L.; Larocca, A.P.C. Least trimmed squares estimator with redundancy constraint for outlier detection in GNSS networks. Expert Syst. Appl. 2017, 88, 230–237. [Google Scholar] [CrossRef]
- Klein, I.; Matsuoka, M.T.; Guzatto, M.P.; de Souza, S.F.; Veronez, M.R. On evaluation of different methods for quality control of correlated observations. Surv. Rev. 2015, 47, 28–35. [Google Scholar] [CrossRef]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying, 4th ed.; John Wiley & Sons: New York, NY, USA, 2015. [Google Scholar]
- Aydin, C.; Demirel, H. Computation of Baarda’s lower bound of the non-centrality parameter. J. Geod. 2005, 78, 437–441. [Google Scholar] [CrossRef]
- Yu, H.; Shen, Y.; Yang, L.; Nie, Y. Robust M-estimation using the equivalent weights constructed by removing the influence of an outlier on the residuals. Surv. Rev. 2019, 51, 60–69. [Google Scholar] [CrossRef]





| Baseline Num. | SD Approach | 3D Approach | 1D Approach | ||||
|---|---|---|---|---|---|---|---|
| (Deg.) | (Deg.) | Test Statistics | Test Statistics | X | Y | Z | |
| 1 | 5.8 | 118.5 | 1.498 | 0.748 | 0.469 | 1.031 | 0.743 |
| 2 | −17.7 | 307.7 | 1.730 | 0.997 | 0.908 | 0.742 | 0.518 |
| 3 | 52.7 | 210.0 | 4.378 | 6.388 | 2.395 | 3.469 | 2.305 |
| 4 | 3.2 | 268.1 | 2.316 | 1.788 | 1.262 | 2.313 | 0.699 |
| 5 | 34.7 | 267.7 | 2.982 | 2.964 | 0.937 | 2.568 | 2.162 |
| 6 | 27.2 | 156.2 | 1.604 | 0.858 | 1.422 | 0.670 | 0.287 |
| 7 | 61.5 | 327.9 | 1.768 | 1.042 | 0.866 | 0.278 | 1.647 |
| 8 | −34.2 | 148.0 | 1.993 | 1.324 | 1.425 | 0.101 | 1.527 |
| 9 | 83.0 | 213.3 | 2.685 | 2.403 | 0.151 | 1.229 | 2.648 |
| 10 | −63.4 | 130.8 | 1.000 | 0.333 | 0.375 | 0.496 | 0.975 |
| 11 | 18.0 | 63.6 | 0.712 | 0.169 | 0.608 | 0.588 | 0.083 |
| 12 | −19.3 | 344.5 | 2.014 | 1.352 | 1.939 | 0.847 | 0.203 |
| 13 | 0.3 | 118.2 | 1.542 | 0.792 | 0.308 | 1.184 | 0.990 |
| 14 | −5.7 | 315.9 | 0.543 | 0.098 | 0.349 | 0.217 | 0.339 |
| 15 | 70.2 | 141.1 | 1.931 | 1.243 | 0.127 | 0.788 | 1.854 |
| 16 | 66.8 | 140.2 | 0.736 | 0.180 | 0.021 | 0.299 | 0.693 |
| SD Approach | 3D Approach | 1D Approach | |
|---|---|---|---|
| Critical Values | 4.033 | 5.422 | 3.291 |
| Test Step | Baseline Num. | SD Approach | 3D Approach | 1D Approach | ||
|---|---|---|---|---|---|---|
| X | Y | Z | ||||
| 1 | 3 | 4.378 | 6.388 | 2.395 | 3.469 | 2.305 |
| 2 | 1 | 2.413 | 1.941 | 0.101 | 2.154 | 1.108 |
| 9 | 2.307 | 1.774 | 0.656 | 0.702 | 2.301 | |
| Site | X (m) | Y (m) | Z (m) |
|---|---|---|---|
| N002 | −2830634.7415 | 4649557.6508 | 3313013.3273 |
| N003 | −2831170.1981 | 4649484.1775 | 3312659.4277 |
| N004 | −2831820.5247 | 4649349.1169 | 3312296.9359 |
| N005 | −2830250.6519 | 4649506.9814 | 3313403.5257 |
| N006 | −2831231.1017 | 4649166.3913 | 3313046.1881 |
| N007 | −2832003.8156 | 4648890.1430 | 3312775.1533 |
| N008 | −2831387.7285 | 4648523.2569 | 3313809.5058 |
| Session | Receiver Station | Baseline No. |
|---|---|---|
| 1 | N001, N002, N003, N005 | 1, 2, 8 |
| 2 | N002, N003, N006 | 3, 11 |
| 3 | N002, N003, N005, N006 | 4, 5, 13 |
| 4 | N005, N006, N007, N008 | 9, 15, 16 |
| 5 | N004, N006, N007 | 10, 14 |
| 6 | N001, N003, N004, N006 | 6, 7, 12 |
| Baseline No. | Mean Lat. | Mean Long. | SD Lat. | SD Long. |
|---|---|---|---|---|
| 1 | 22.7 | 117.7 | 10.3 | 7.7 |
| 2 | 25.9 | 114.1 | 7.6 | 8.5 |
| 3 | 31.0 | 121.8 | 1.2 | 1.1 |
| 4 | 15.9 | 97.2 | 18.5 | 70.9 |
| 5 | 25.1 | 118.8 | 6.5 | 3.0 |
| 6 | 26.1 | 118.7 | 5.3 | 2.8 |
| 7 | 15.8 | 113.6 | 16.0 | 8.9 |
| 8 | 17.7 | 115.4 | 14.1 | 6.6 |
| 9 | 31.7 | 123.1 | 2.5 | 3.0 |
| 10 | 31.7 | 122.4 | 2.0 | 2.3 |
| 11 | 32.1 | 120.3 | 1.2 | 1.4 |
| 12 | 32.8 | 122.5 | 1.9 | 1.7 |
| 13 | 29.7 | 121.4 | 2.0 | 1.2 |
| 14 | 33.6 | 123.9 | 3.2 | 3.5 |
| 15 | 34.2 | 124.7 | 3.8 | 4.3 |
| 16 | 26.1 | 129.7 | 13.2 | 49.7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nie, Y.; Yang, L.; Shen, Y. Specific Direction-Based Outlier Detection Approach for GNSS Vector Networks. Sensors 2019, 19, 1836. https://doi.org/10.3390/s19081836
Nie Y, Yang L, Shen Y. Specific Direction-Based Outlier Detection Approach for GNSS Vector Networks. Sensors. 2019; 19(8):1836. https://doi.org/10.3390/s19081836
Chicago/Turabian StyleNie, Yufeng, Ling Yang, and Yunzhong Shen. 2019. "Specific Direction-Based Outlier Detection Approach for GNSS Vector Networks" Sensors 19, no. 8: 1836. https://doi.org/10.3390/s19081836
APA StyleNie, Y., Yang, L., & Shen, Y. (2019). Specific Direction-Based Outlier Detection Approach for GNSS Vector Networks. Sensors, 19(8), 1836. https://doi.org/10.3390/s19081836