1. Introduction
As a piece of control and protection equipment in power system [
1,
2], gas insulated switchgear (GIS) plays a significant role in high-voltage power grids. Discovering potential defects and hidden danger in the process of operation of GIS equipment in time can ensure the reliability and security of power grid operations.
The existing research on the reliability of GIS is mainly focused on the insulation fault diagnosis through signal analysis, and many experts have conducted extensive research on this topic. The main detection methods of partial discharge defects include the electrical method [
3,
4,
5], acoustic method [
6,
7] and chemical method [
8,
9]. Aiming at the condition monitoring and diagnosis of gas insulated structures, a real-time measurement system combining signal acquisition, mode generation, feature extraction and defect recognition was proposed [
10]. The ultra high frequency (UHF) method was used to analyze the characteristics of partial discharge, and short-time Fourier transform (STFT) [
11] was used to describe the time-frequency characteristics [
12,
13]. Combined weight function classification tools and K-means clustering, and pulse parameters in both time and frequency domains were used to effectively identify noise signals and discharge pulses [
14].
Compared with insulation faults, the development of intelligent diagnosis technology for mechanical faults in GIS is very slow. Under the action of electromotive force generated by AC current in conductors, the vibration signal in the fault changes correspondingly compared with the normal situation. In order to realize the intelligent diagnosis of mechanical faults in GIS, it is necessary to study in depth the characteristics of vibration signals of the GIS shell. The empirical mode decomposition (EMD) [
15] method was used to analyze the vibration signal, and the characteristic matrix was defined to form the criterion of mechanical fault in GIS [
16]. The full-acoustic acquisition method was used to collect different mechanical fault data, and the acoustic characteristics of signal was summarized to conduct fault diagnosis [
17]. The transient vibration characteristics of GIS were analyzed by using finite element simulation software ANSYS, and the theoretical basis of mechanical defect detection technology in GIS based on vibration information was provided [
18,
19]. The vibration mechanism of GIS was studied in depth, and by extracting features of vibration signals using spectrum analysis, a method for detecting the mechanical state of GIS based on vibration information was proposed [
20,
21]. A new algorithm, which is composed of the k-nearest neighbor algorithm and the fuzzy c-means clustering algorithm, for the mechanical fault diagnosis of ultra-high voltage GIS was proposed to realize the detection of the mechanical state of GIS [
22].
Generally speaking, the aforementioned documents have made great contributions to the development of mechanical fault diagnosis technology in GIS. However, due to the non-linearity, signal dispersion and noise interference of the GIS system, it is difficult to extract features and screen feature space. The features extracted from the aforementioned documents are insufficient, and the problem is more prominent when the number of samples is large. In addition, the training process of a single classifier is affected by the overall error rate, so the model may favor the majority class and ignore the minority class. The feature extraction method based on coherent function (CF) [
23] can summarize the similarities of a spectrum and get the feature sets, and the union of all typical fault feature sets is selected as the feature atlas of GIS fault description. Holistic learning [
24,
25] is very common in machine learning [
26,
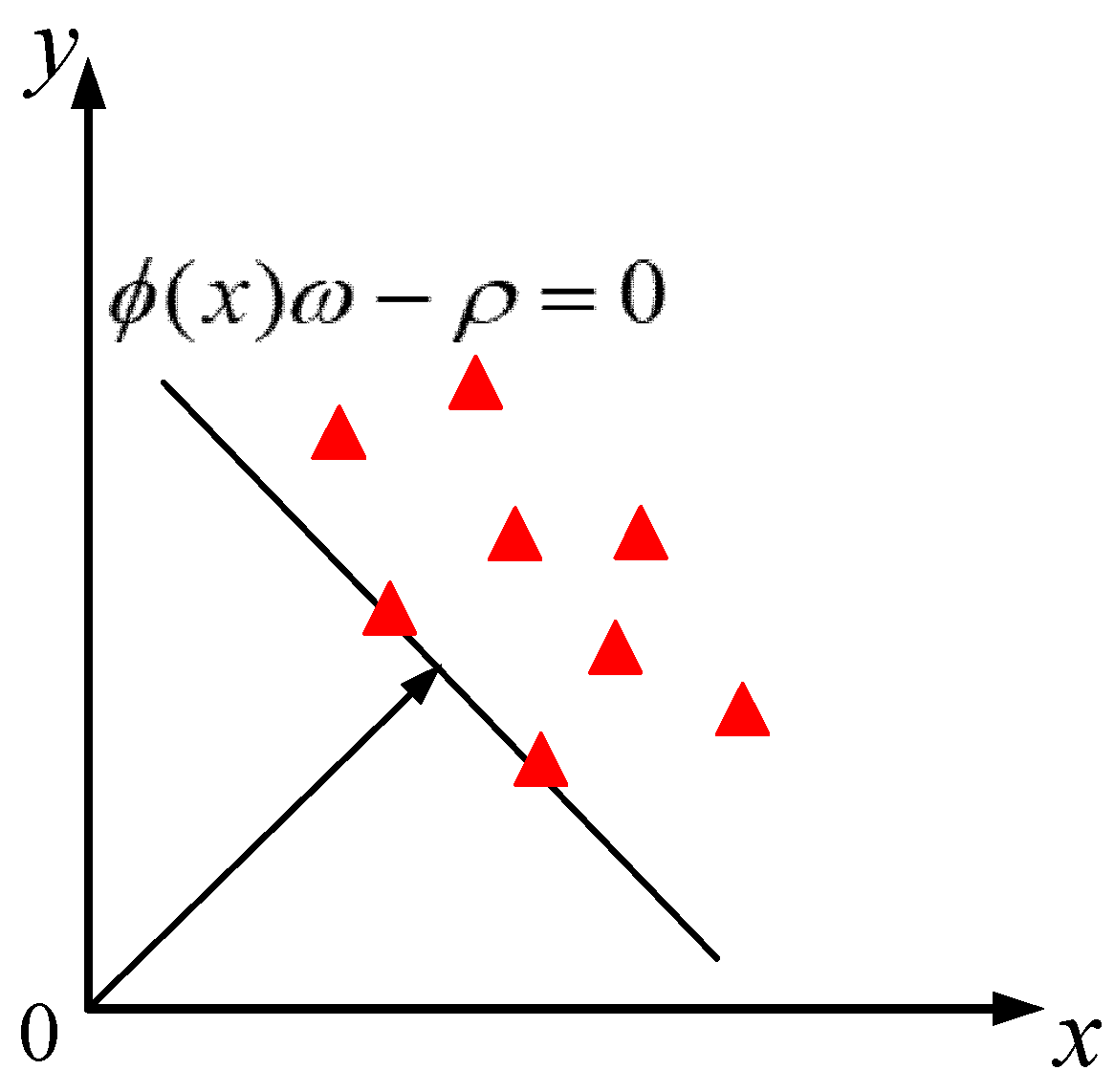
27]. A series of single weak classifiers are constructed and combined to classify or predict new data by a weighted or unweighted voting method. One-class support vector machines (OCSVM) [
28,
29,
30] can solve the problem of unbalance between normal data and fault data; beyond this, it can judge the unknown faults, and the feature has been applied in the field of fault diagnosis. For example, system combining model-based diagnosis and data-driven anomaly classifiers for fault isolation used OCSVM to identify unknown faults, and the validity of the method was verified in the internal combustion engines [
31,
32]. SVM [
33,
34] can effectively divide the feature space and better classify the fault conditions.
In this paper, a new feature extraction method based on CF was proposed, and a multi-layer classifier composed of OCSVM and support vector machine (SVM) was constructed. The feasibility of the feature extraction method was verified by experiments, and the advantages of the proposed classifier were verified by comparing with the general classification methods such as Softmax [
35], SVM, back propagation neural networks (BPNN) [
36] and naive Bayes (NB) [
37]. The main contributions of this paper can be summarized as follows:
- (1)
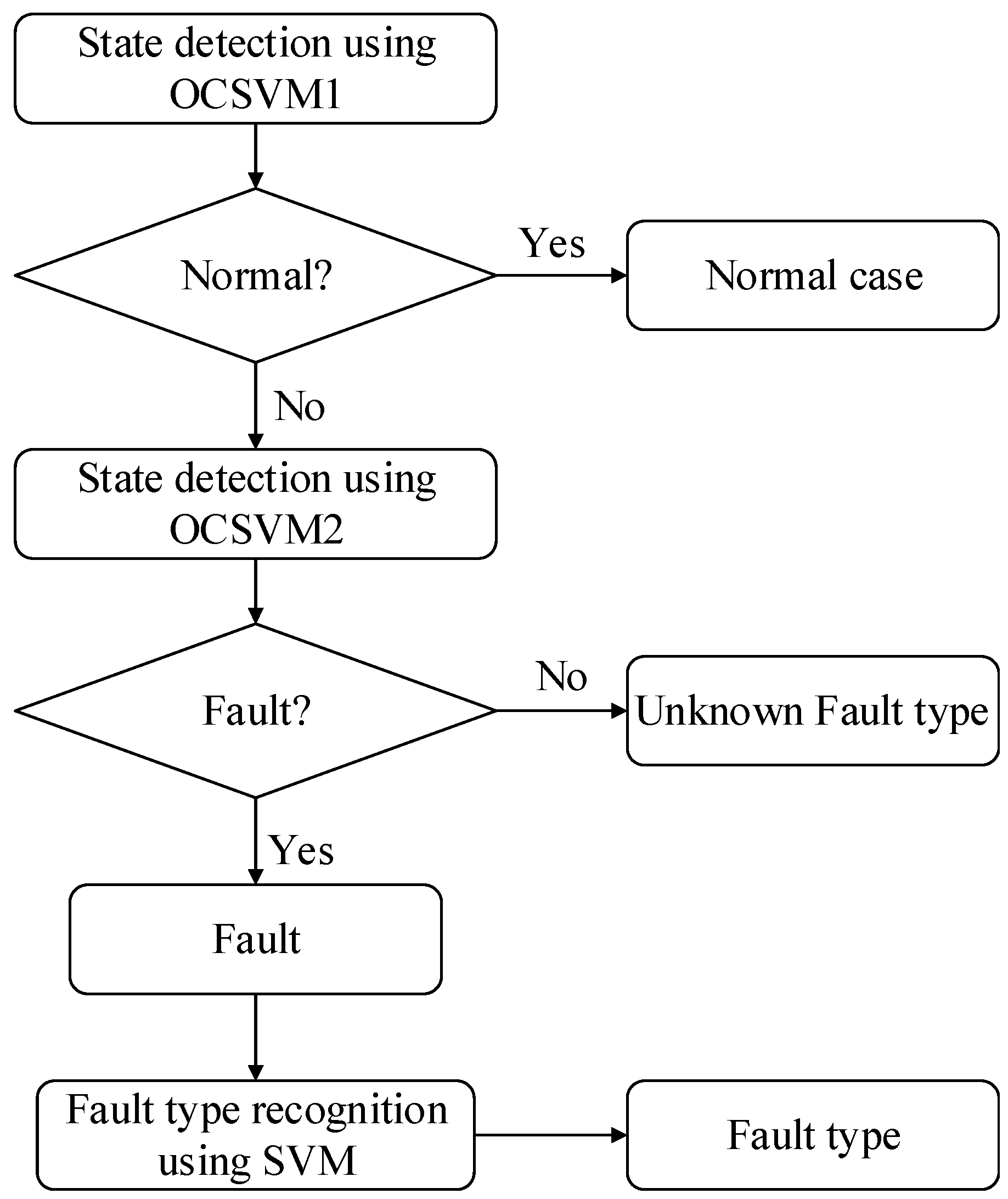
GIS mechanical fault is diagnosed by a holistic approach which integrates the vibration signal acquisition system, feature extraction based on CF and a multi-level classifier composed of OCSVMs and SVM;
- (2)
The CF is introduced into the feature screening process, and a method of feature extraction based on CF with double thresholds is proposed, which provides a new idea for feature screening and can fully describe characteristics of the vibration signal;
- (3)
A multi-layer classifier composed of OCSVM and SVM is designed to diagnose GIS faults.
The remainder of this paper is organized as follows:
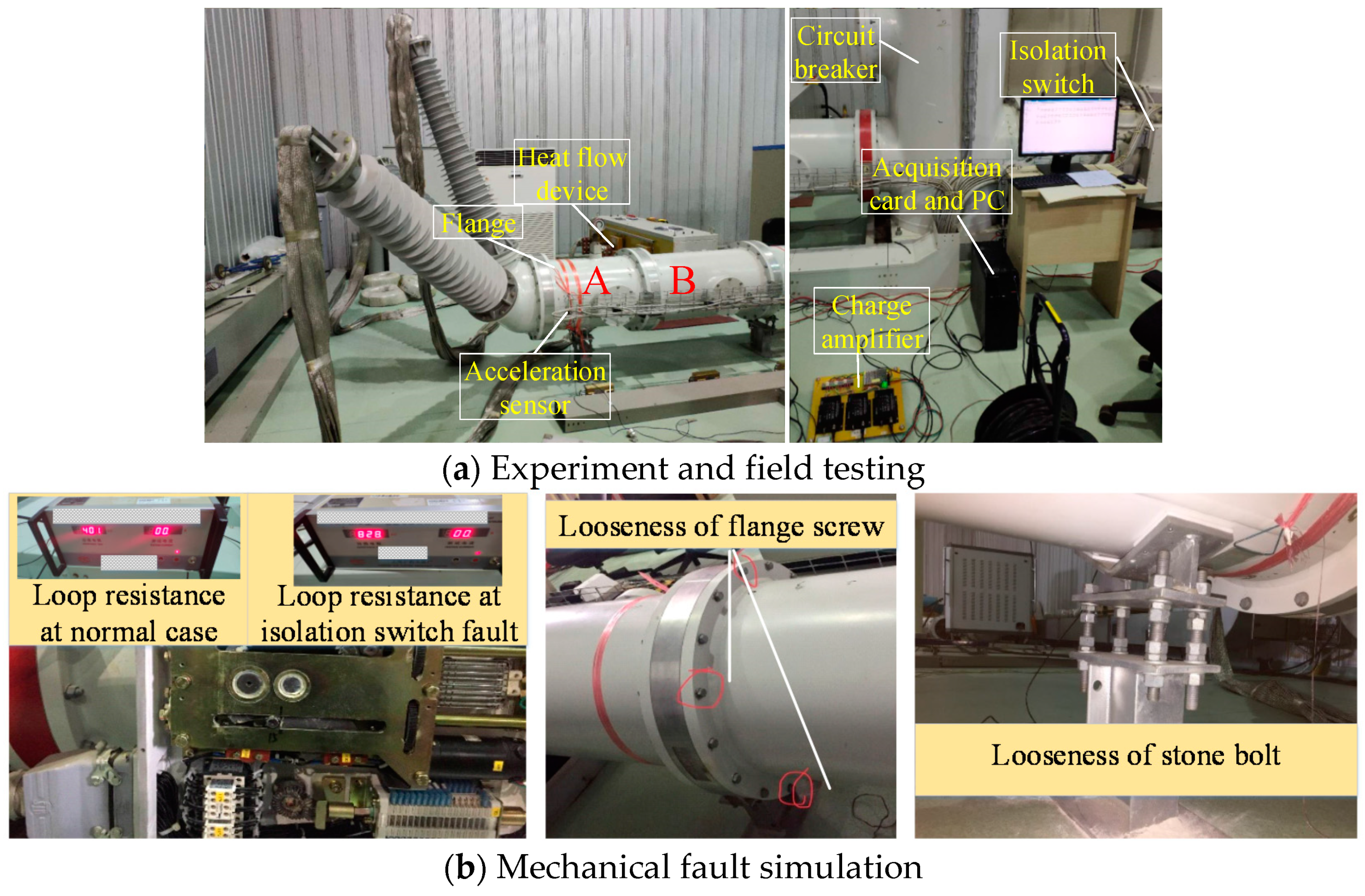
Section 2 introduces the vibration information acquisition system of GIS, the experiment platform and the vibration signal analysis;
Section 3 presents the method of extracting vibration features;
Section 4 discusses the establishment of GIS fault classifier;
Section 5 discusses the parameters of the diagnosis model and the optimization of feature space, and compares the method with other traditional diagnosis methods to prove the improvement in the diagnosis accuracy. Finally,
Section 6 summarizes the contributions of the paper.
3. Feature Extraction Method of Vibration Signals
3.1. Principle of CF
In the field of signal processing, CF is commonly used to measure the degree of linear correlation between two signals in each frequency component. In this paper, the CF is used for feature extraction.
Suppose there are two time-domain signals
Sx(
t) and
Sy(
t), the calculation methods of CF are as follows [
38]: (1) calculate Fourier spectrum
Ax(
f) and
Ay(
f) of
Sx(
t) and
Sy(
t), respectively; (2) calculate self-power spectral density functions
Sx(
f) and
Sy(
f),
where
Ax*(
f) and
Ay*(
f) are the complex conjugation of
Ax(
f) and
Ay(
f), respectively; (3) calculate the cross power spectral density function,
(4) calculate the CF of
Sx(
t) and
Sy(
t),
The range of Cxy(f) is [0,1], and the larger the value of Cxy(f0) at a certain frequency f0, the greater the coherence of signal Sx(t) and Sy(t) at the frequency of f0. Sx(t) and Sy(t) are irrelevant when CF is 0 and completely coherent when CF is 1. There are two advantages of the CF: (1) CF can describe the frequency commonality of two signals; (2) CF is not affected by absolute amplitude of the signals and describes the amplitude similarity of two signals at the same frequency point.
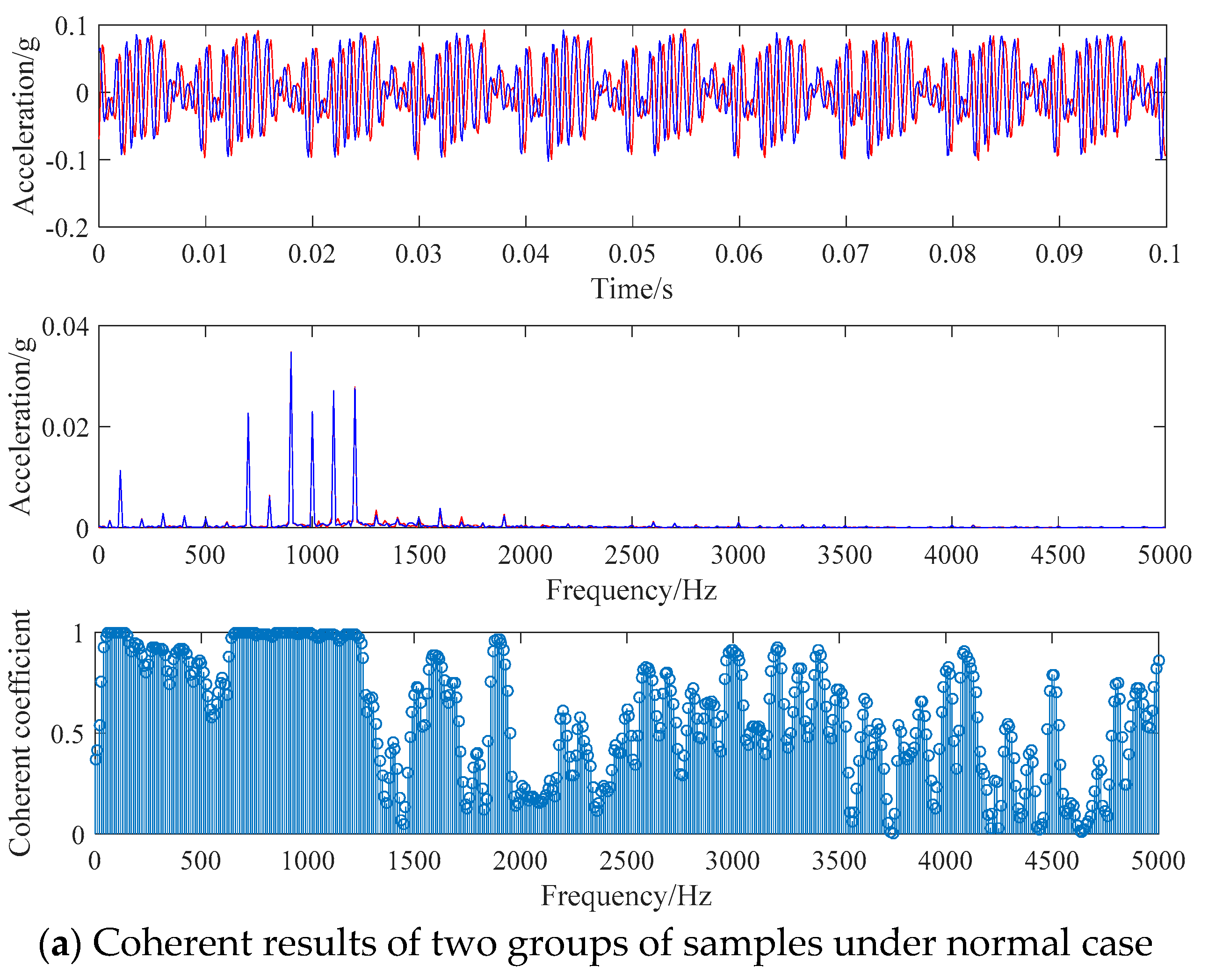
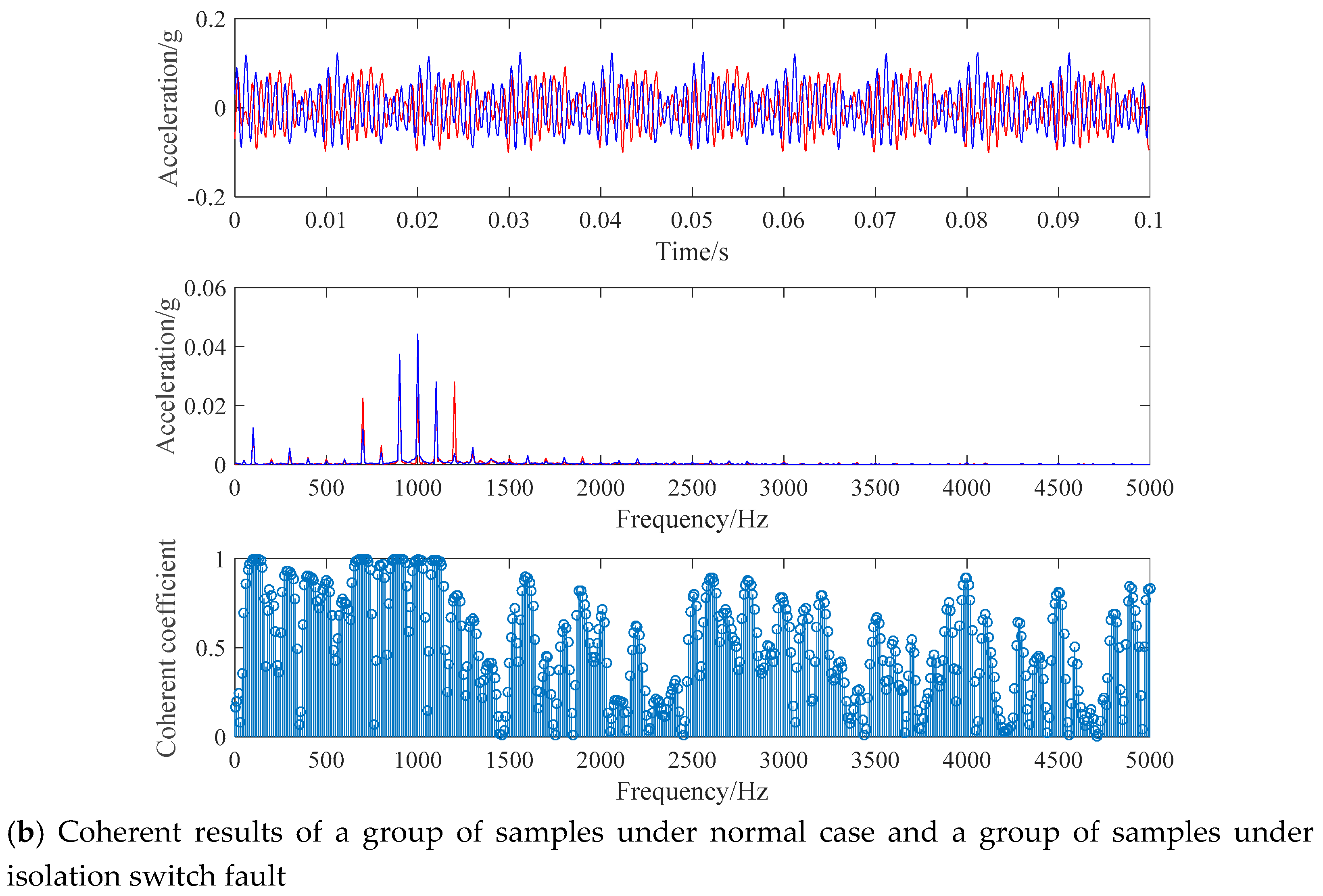
Firstly, two groups of samples are taken out from the normal signals for CF calculation, and the results are shown in
Figure 4a. Then, a group of samples are extracted from the vibration signals of the normal case and the isolation switch fault respectively for coherence analysis, and the results are shown in
Figure 4b.
As illustrated in
Figure 4a, the waveforms of the vibration signals of the two groups of normal samples are basically the same, while the waveforms of the two groups of signals in
Figure 4b are quite different (red is the normal case sample, blue is the isolation switch fault sample). The energy distribution of the two samples is consistent at most frequency points in the same working condition and has a large difference in different working conditions. The CF of two samples is calculated at the frequency points which are multiples of 10 Hz. The results show that the coherence coefficients of many frequency points are close to 1 in the same working condition, while the frequency points with coherence coefficients close to 1 in different working conditions being few in number.
3.2. Design Ideas of Feature Construction
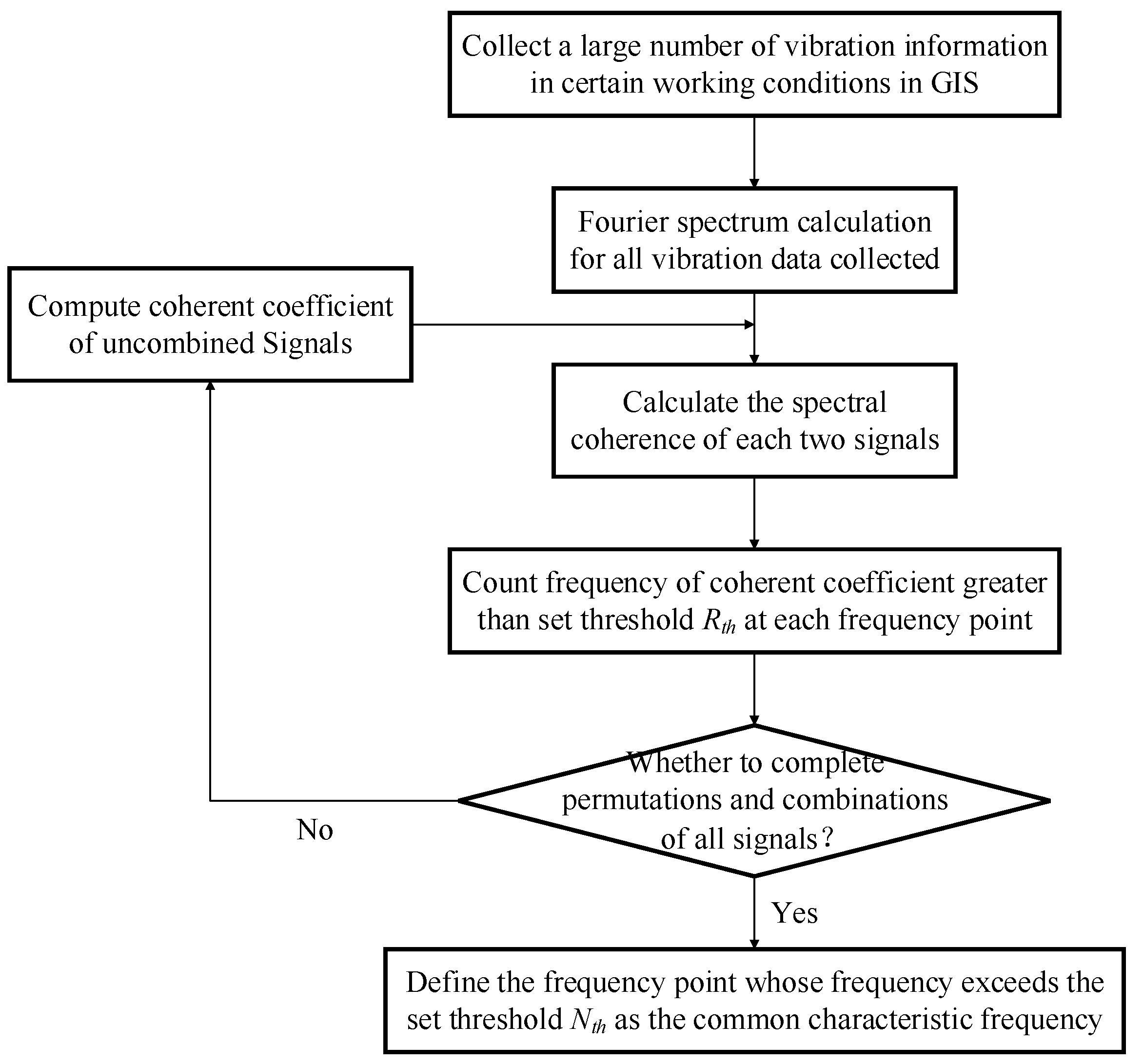
Based on the coherence analysis above, the relationship between two signals at a specific frequency point can be described by the coherent coefficient between signals, thereby obtaining the relevant frequency points describing the commonality of the two signals. However, considering the dispersion of vibration signals and noise interference, it is necessary to calculate the coherence of a large number of signals of the same working condition. This paper designs a feature extraction method based on vibration information in different mechanical conditions, and the specific process is shown in
Figure 5.
Step 1: Collect m groups of vibration signal samples of a typical type of mechanical defect, and perform a Fourier transform on each sample;
Step 2: Calculate the CF of each of two samples, set the strong correlation threshold Rth, judge the coherence coefficient of the selected frequency points (multiples of 10 Hz) and the threshold Rth, and define the frequency point whose coherence coefficient is larger than Rth as the potential common characteristic frequency feature of this kind of working condition;
Step 3: Count the number of occurrences of each potential common frequency points, set the frequency threshold N = Nth × , where Nth is the frequency threshold coefficient (), and define the potential common frequency points whose occurrence times are greater than the threshold N as the clear common frequency points of the certain working condition to build feature space.
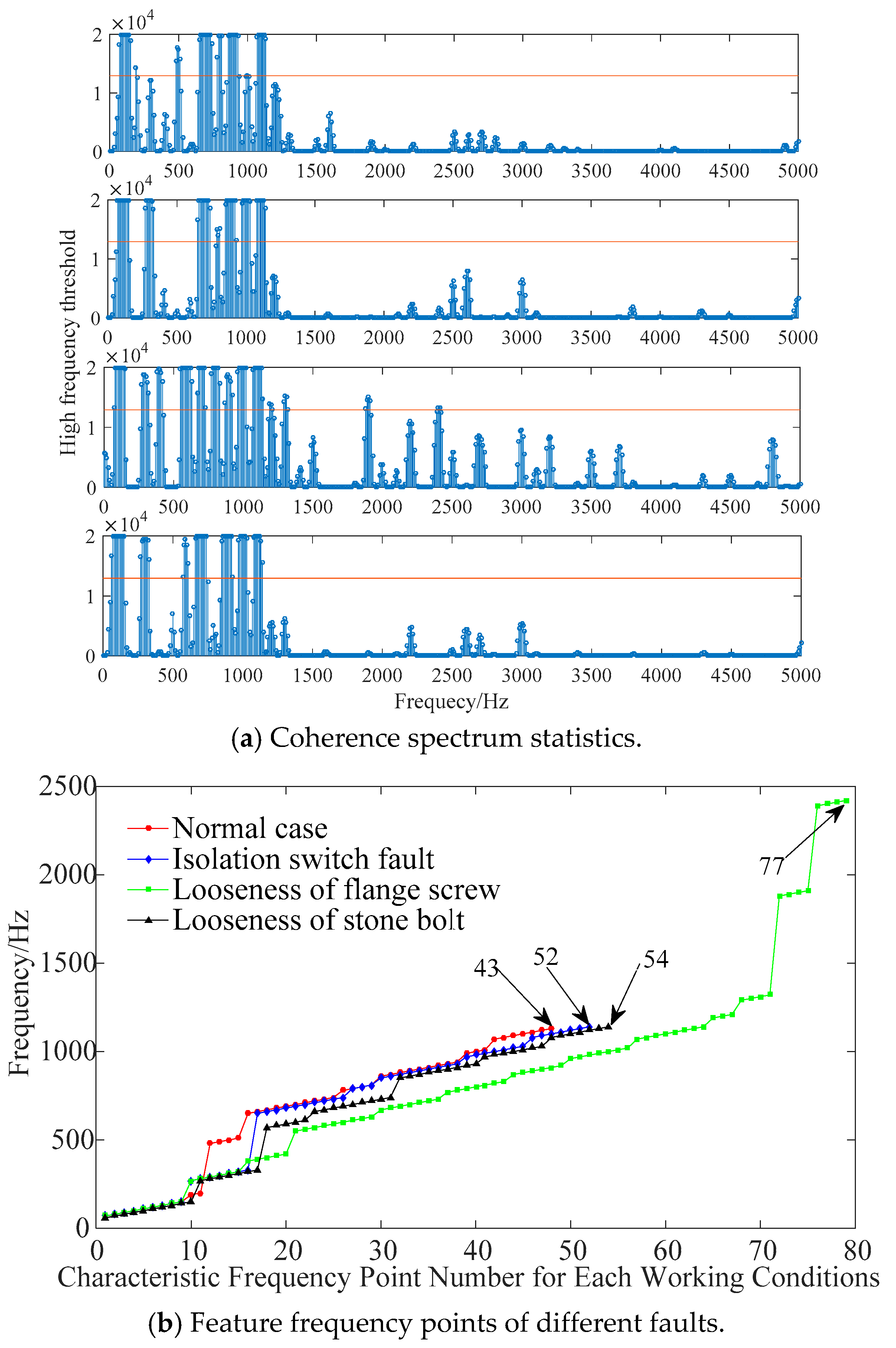
In this paper, the sample number
m is 200, the strong correlation threshold
Rth is 0.9, and the frequency threshold coefficient
Nth is 0.65. The coherent results of each working condition are shown in
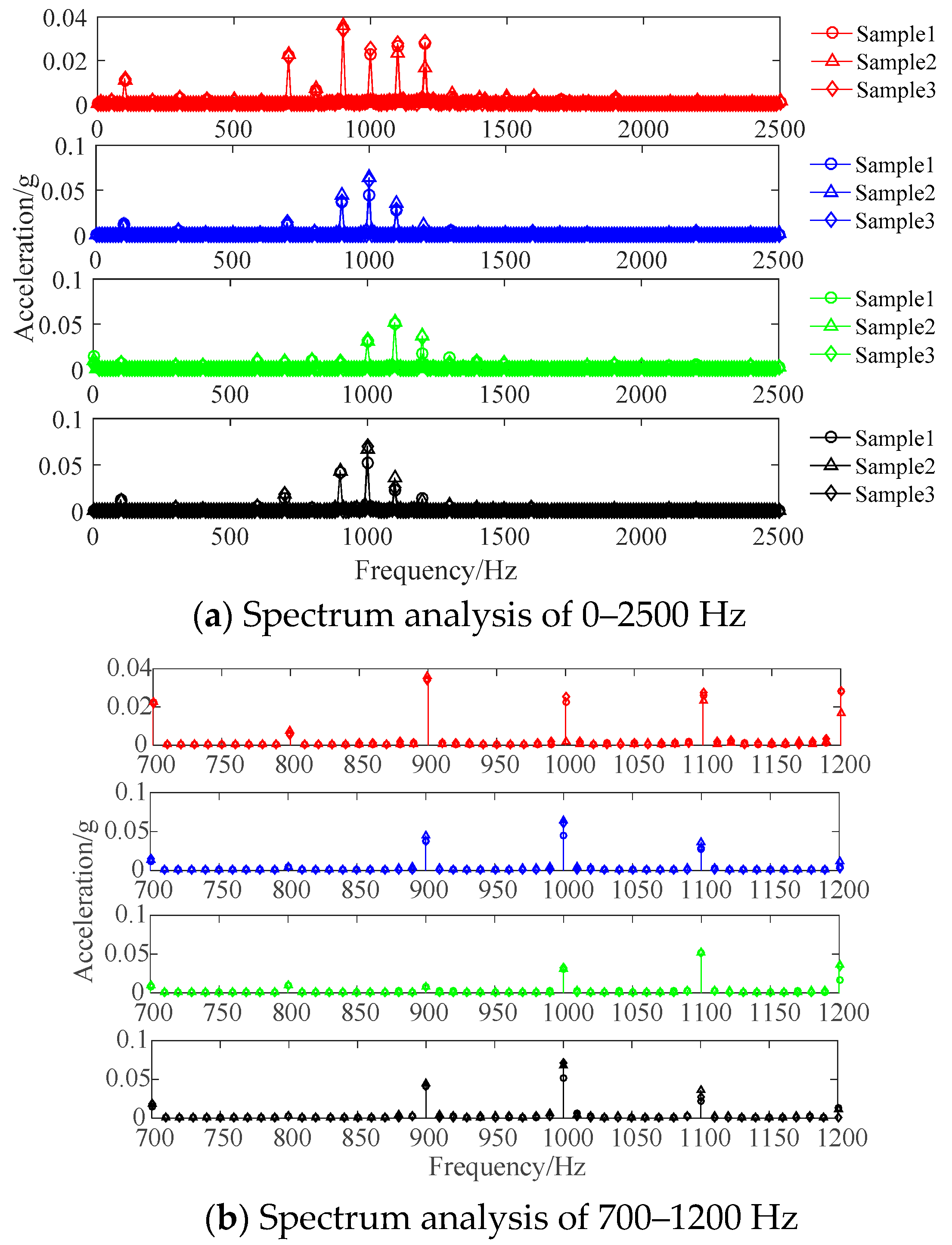
Figure 6a: (1) the characteristic frequency points above 1.5 kHz and around 0.4 kHz exist only in the flange loosening fault; (2) compared with the fault conditions, there are characteristic frequency points of about 0.5 kHz in the normal condition, but not characteristic frequency points around 0.3 kHz; (3) compared with other conditions, the condition of stone bolts loosening lacks the characteristic frequency points near 0.8 kHz; (4) only the flange loosening and the stone bolts loosening fault have characteristic frequency points near 0.6 kHz.
Figure 6b shows the characteristic frequency curves in different working conditions. The feature vector and the number of characteristic frequency points were quite different, and the union of feature points was used as the final feature to diagnose fault types.
5. Diagnosis Results and Analysis
5.1. Discussion of Parameters
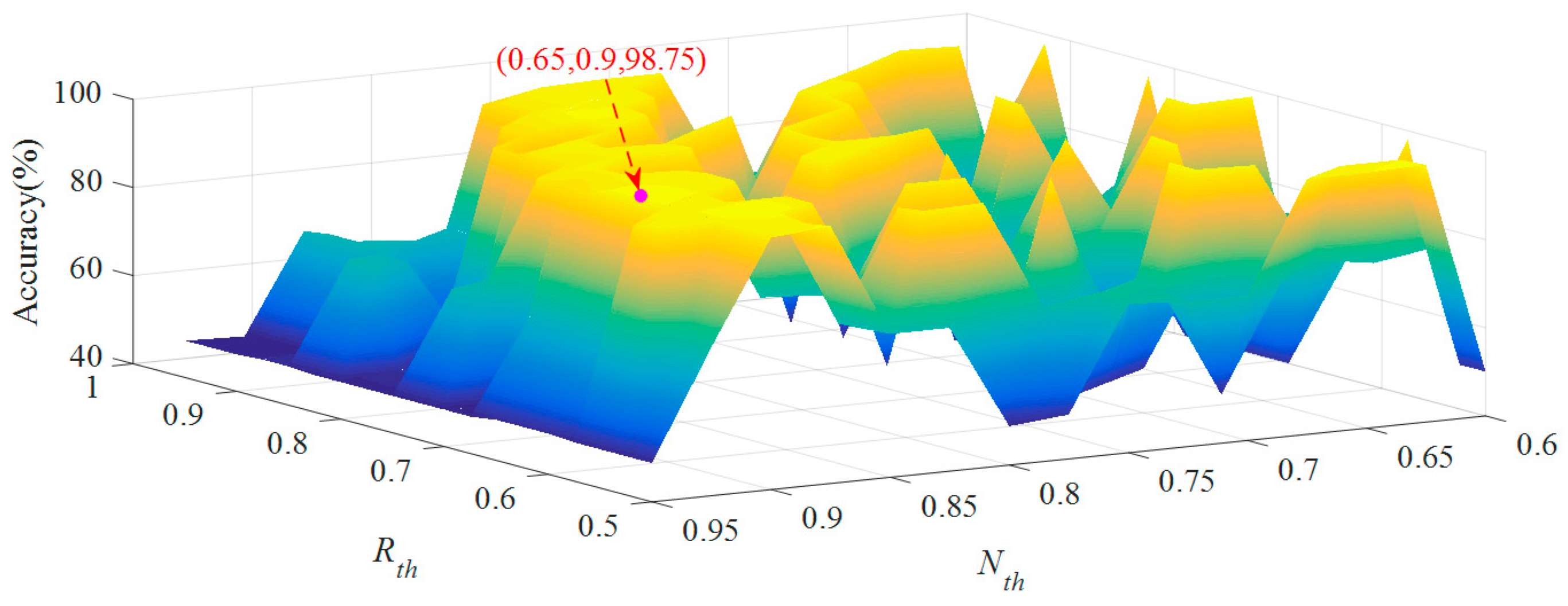
Rth and Nth are two very important parameters in the mechanical fault diagnosis technology proposed in this paper, which jointly determine the feature space of different working conditions, and then affect the final diagnosis results.
If Rth is too small, the difference in frequency energy distribution between signals cannot be effectively distinguished, and it will cause excessive characteristic frequency points, which make it difficult to select characteristic frequency points. If Rth is too large, the effect of dispersion between signals is ignored.
If Nth is too small, the characteristic frequency points will spread throughout the frequency domain, and the meaning of feature extraction is lost. If Nth is too large, too few characteristic frequency points will reduce the accuracy of fault diagnosis.
In order to discuss the values of parameters
Rth and
Nth, this paper selected [0.5, 0.95] as the value range of
Rth, [0.6, 0.95] as the range of
Nth and 0.025 as the step size.
Figure 10 shows the relationship between diagnosis accuracy and two key parameters. The diagnosis accuracy is low when both
Rth and
Nth take large or small values. When values of
Rth and
Nth are 0.65 and 0.9, respectively, the diagnosis accuracy is the highest, which reaches 98.75%.
In addition to
Rth and
Nth, the main parameters of the diagnosis model using radial basis function (RBF) [
42] kernel function are listed in
Table 3.
5.2. Diagnosis Results
After the parameters are determined, 10 experiments were conducted to test the stability of the diagnosis model, and the results are compared with the methods of Softmax, SVM, BPNN and NB.
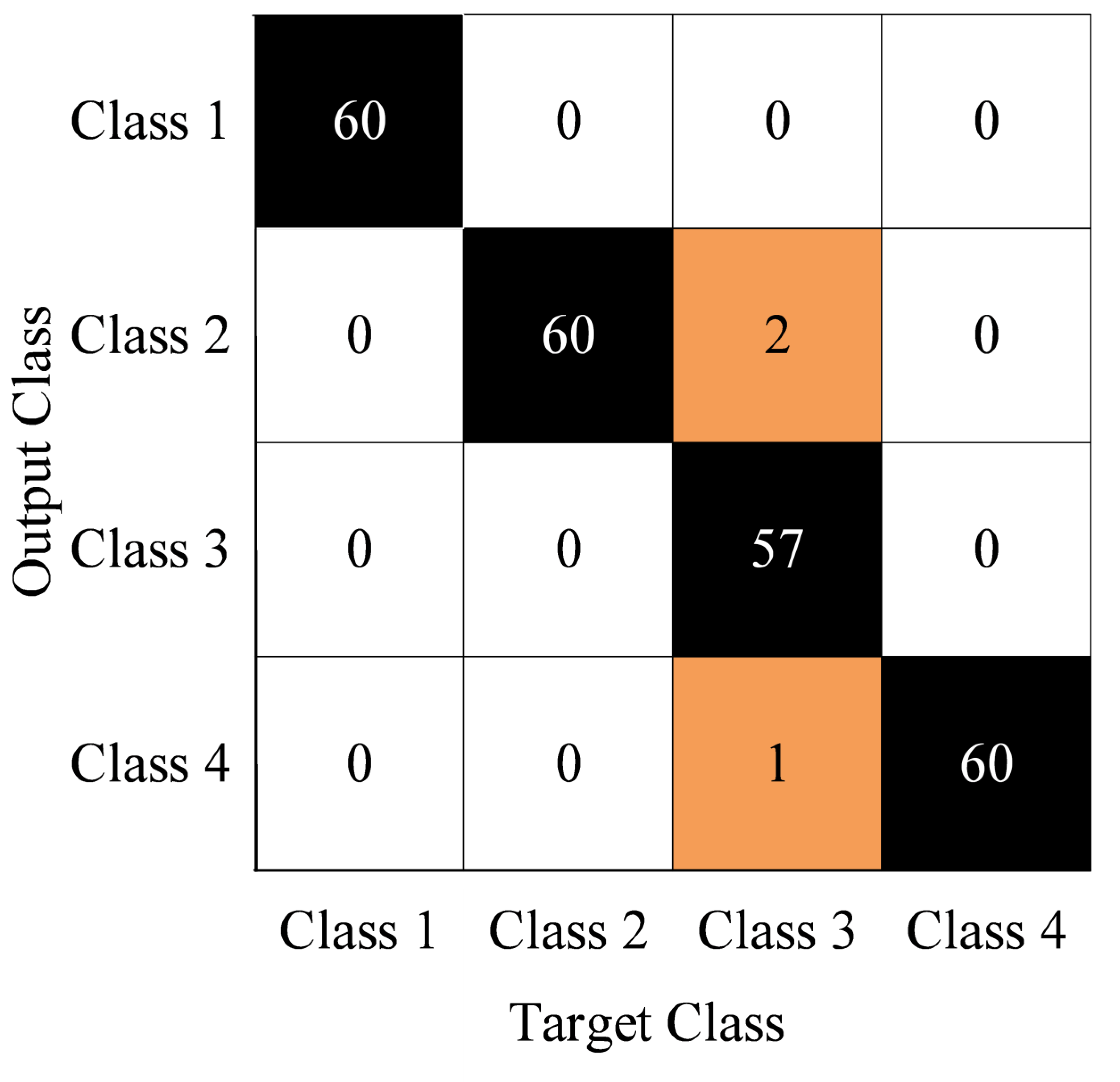
Figure 11 shows the confusion matrix obtained from the first experiment by the proposed method. The diagnosis accuracy of the normal case, isolation switch fault, looseness of flange screw and looseness of stone bolt are 100%, 100%, 97.5% and 100%, respectively. The 0 sample is diagnosed as unknown faults.
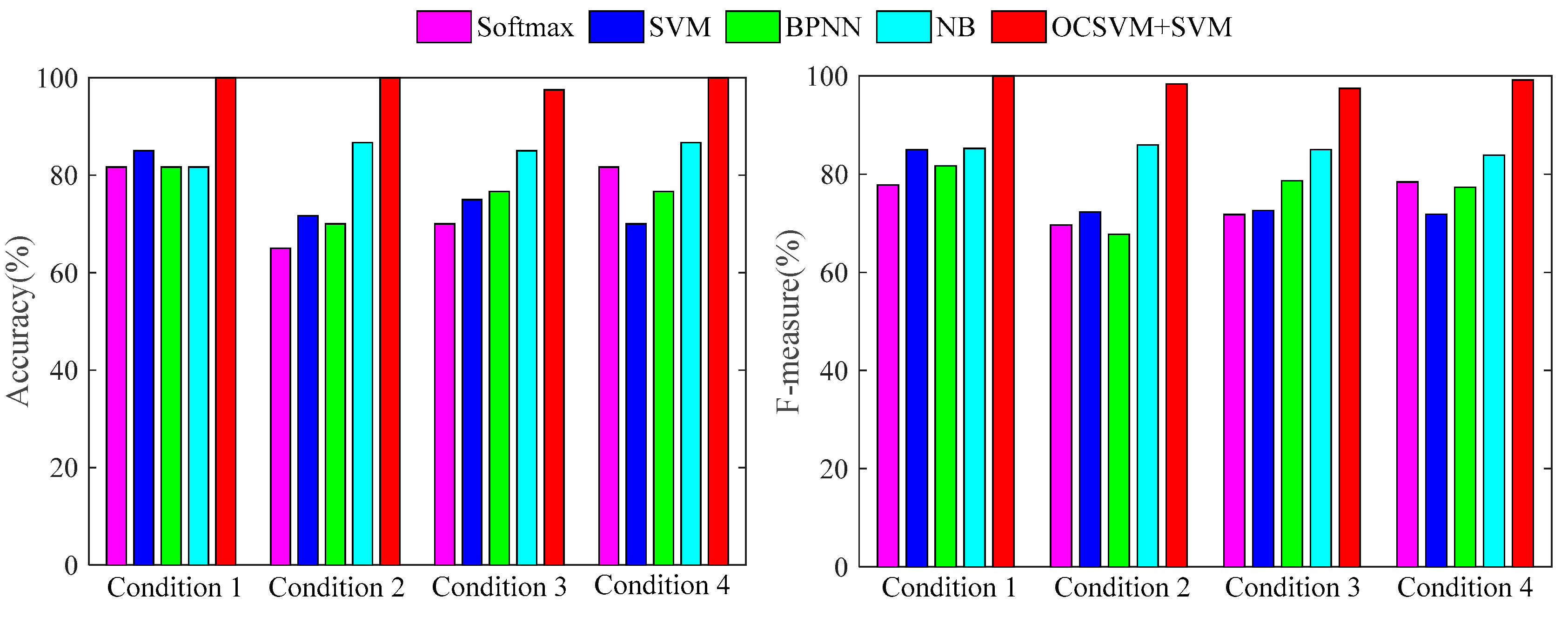
Figure 11 shows that the proposed method performs well in the first experiment. In order to compare different methods,
Table 4 and
Table 5 show the diagnosis accuracy and F-measure of different methods in the first experiment.
Figure 12 shows the comparison of different methods in terms of accuracy and F-measure.
Table 4 and
Table 5, and
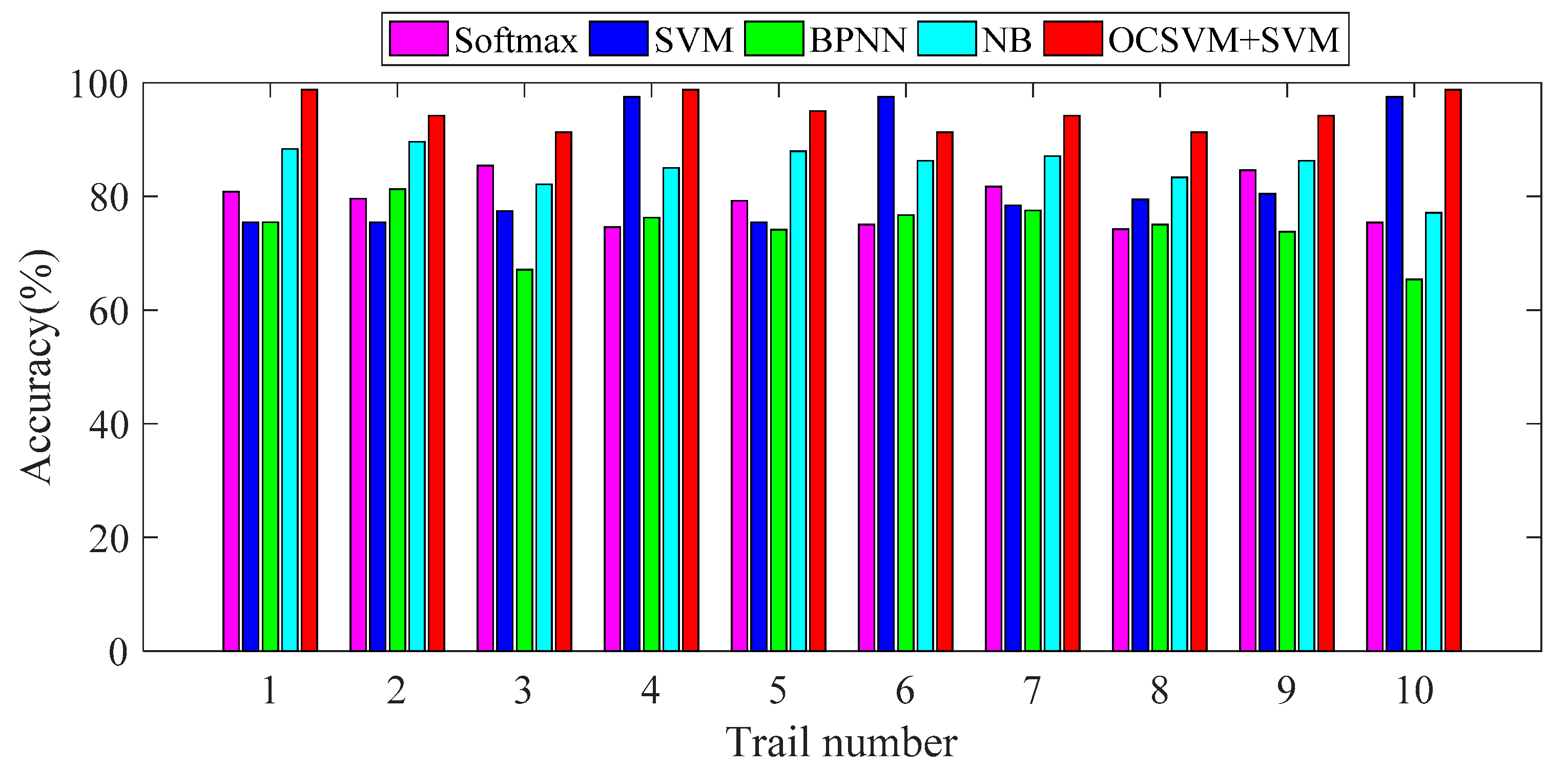
Figure 12 exhibit that the accuracy and F-measure of the proposed method are higher than other classification methods in each working condition, which shows that the method is more suitable than standard deep learning for feature learning in the paper. The results of 10 random experiments are shown in
Figure 13.
In 10 random experiments, the diagnosis accuracy of the proposed method is above 90%, which is generally higher than Softmax, SVM, BPNN and NB. It is only slightly inferior to SVM in the Test 6 test, which indicates that the method proposed in this paper is more stable and has a better diagnosis effect.
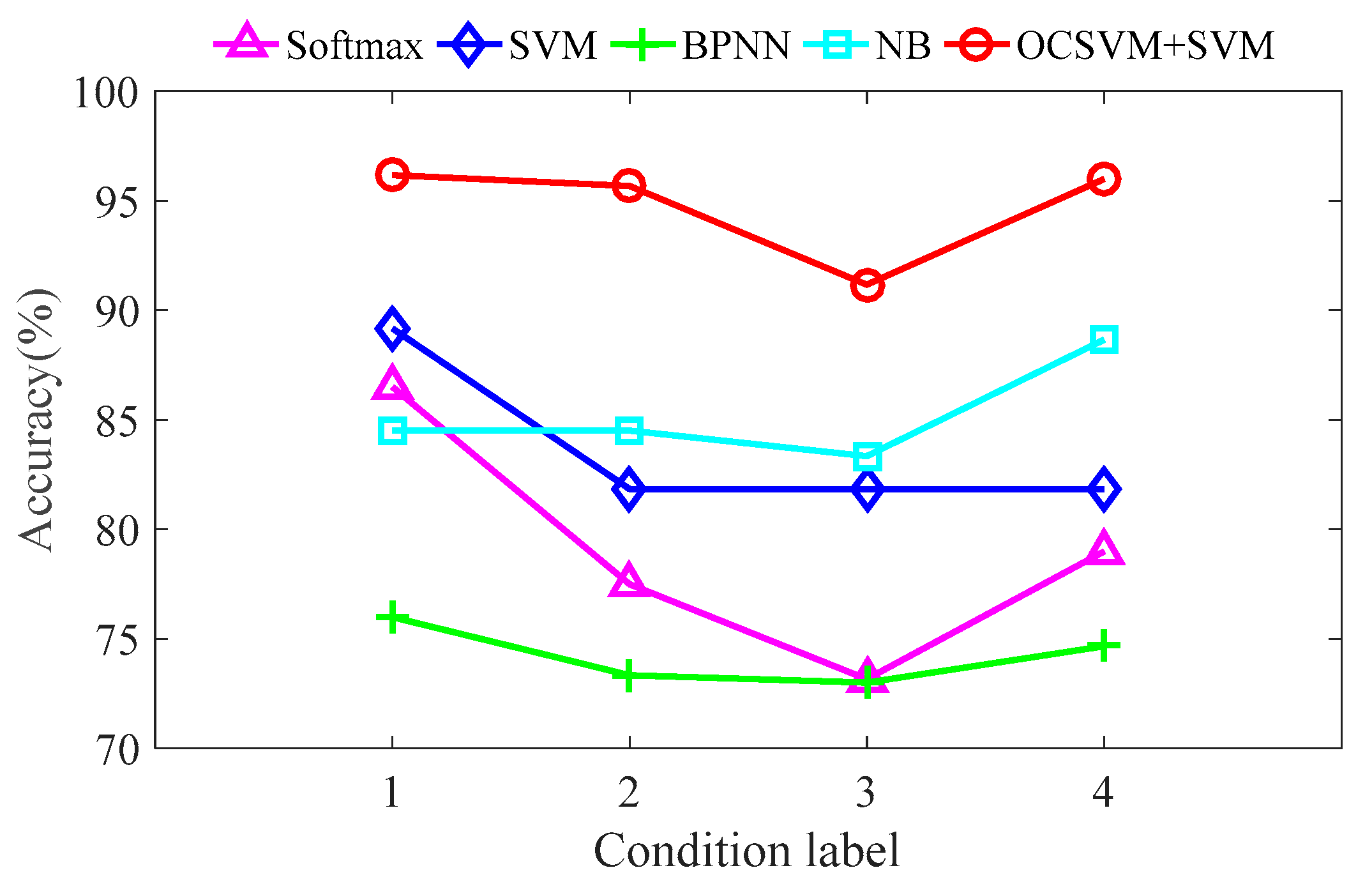
In order to further evaluate the diagnosis model, the average and standard deviation were used as indicators to compare the diagnosis accuracy of each working condition with different methods. The statistical results are shown in
Figure 14 and
Table 6.
Figure 14 and
Table 5 show that: (1) the average diagnosis accuracy of the proposed classifier is higher than that of other methods and the standard deviation is lower than that of other methods, which show that the proposed classifier is more stable and reliable; (2) considering the standard deviation, the diagnosis accuracy of the proposed classifier may be lower than other methods, but it is obviously superior to other methods overall, which shows that the method proposed in this paper is more effective for the classification of mechanical working conditions in GIS, and the diagnosis model is more reliable; (3) the feature extraction method proposed in this paper is effective and feasible.
To verify the ability of the diagnosis model to judge the unknown faults, the 20 groups of vibration samples of two composite faults (a combination of isolation switch fault and looseness of stone bolt, a combination of looseness of flange screw and looseness of stone bolt) were collected, respectively. Diagnosis results are shown in
Table 7.
The diagnostic accuracy of the two composite faults are 85% and 95%, respectively, indicating that the diagnosis model has a good ability to identify unknown faults.
6. Conclusions
It is important to improve the reliability of the operation of GIS equipment and find out the potential defects in the operation in time. Thus, a holistic approach composed of a method to extract features and a multi-layer classifier was proposed in this study. First, we developed the characteristic description method based on CF. Then, based on OCSVM and SVM, a multi-layer classifier was constructed to conduct fault diagnosis.
The usefulness of feature learning was verified by a comparison among five machine learning methods in a series of experiments. The experimental results indicated that the technique of using CF for feature screening is feasible, and a new idea is provided for feature extraction. At the same time, it also proves that the classifier proposed in the paper is more stable and reliable than other methods. The fault diagnosis method proposed in this paper can play a certain role in the condition detection of GIS and promote the development of intelligent detection technology of the mechanical state in GIS.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}