Bearing Fault Diagnosis with a Feature Fusion Method Based on an Ensemble Convolutional Neural Network and Deep Neural Network

Abstract
:1. Introduction
2. Fundamental Theories
2.1. DNN Model
2.2. CNN
2.3. Forward Transmission Process and Back Propagation of CNN and DNN
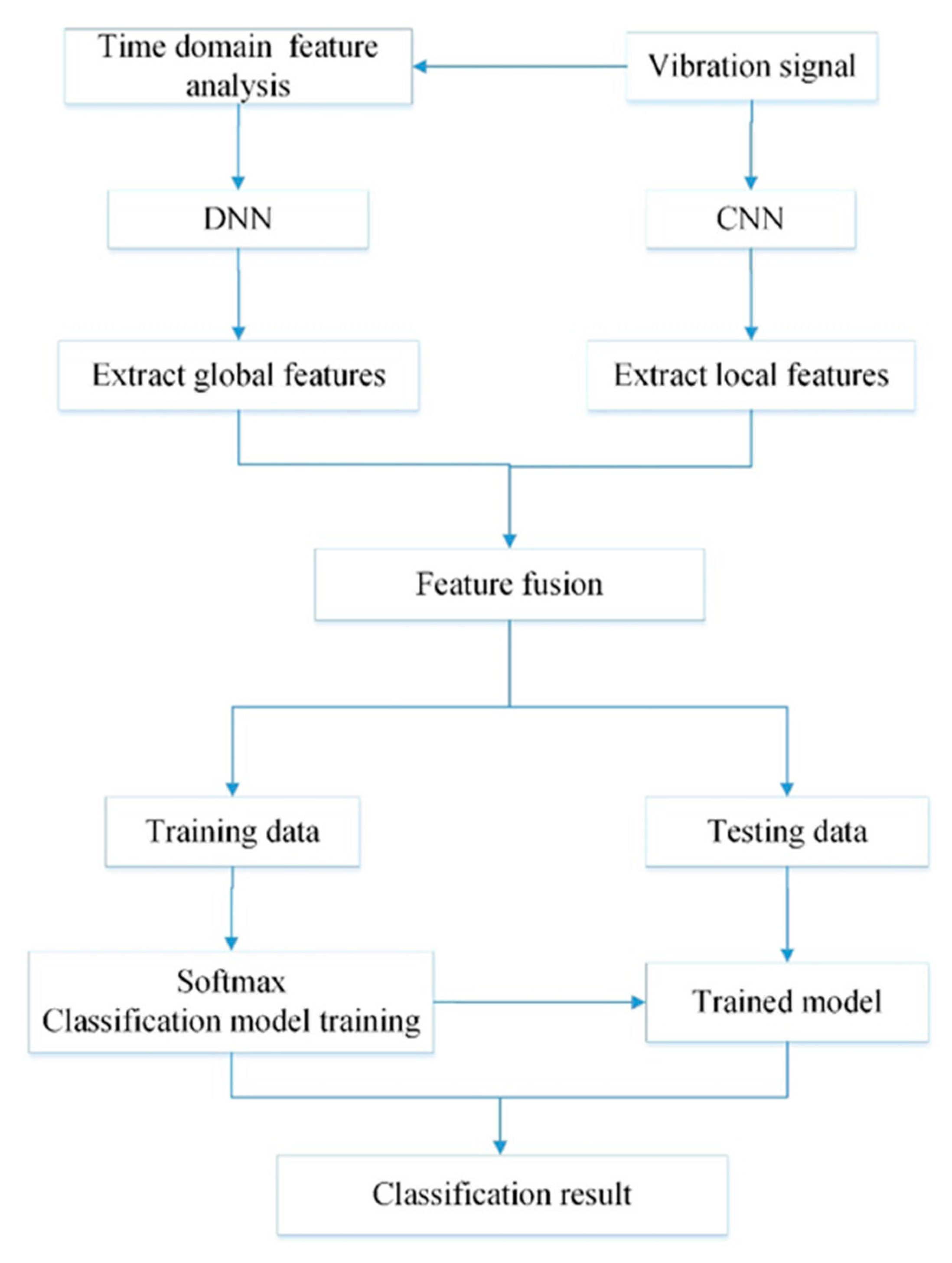
3. CNNEPDNN Model
4. Fault Diagnosis Based on CNNEPDNN
4.1. Experimental Setup
4.2. Diagnostic Results and Analysis
4.2.1. Convergence Speed of Training Loss Function
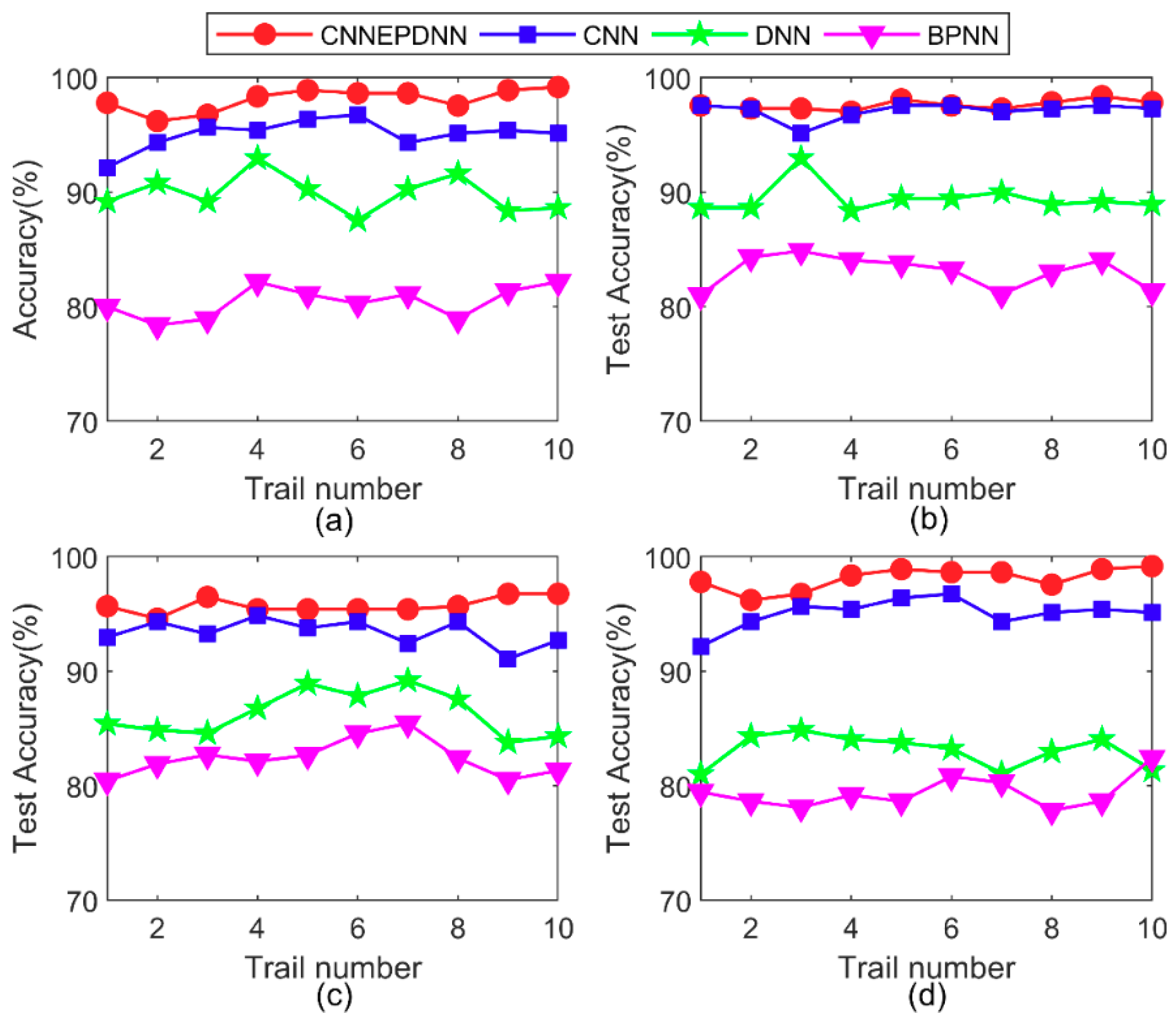
4.2.2. Test Accuracy
4.2.3. F-Score
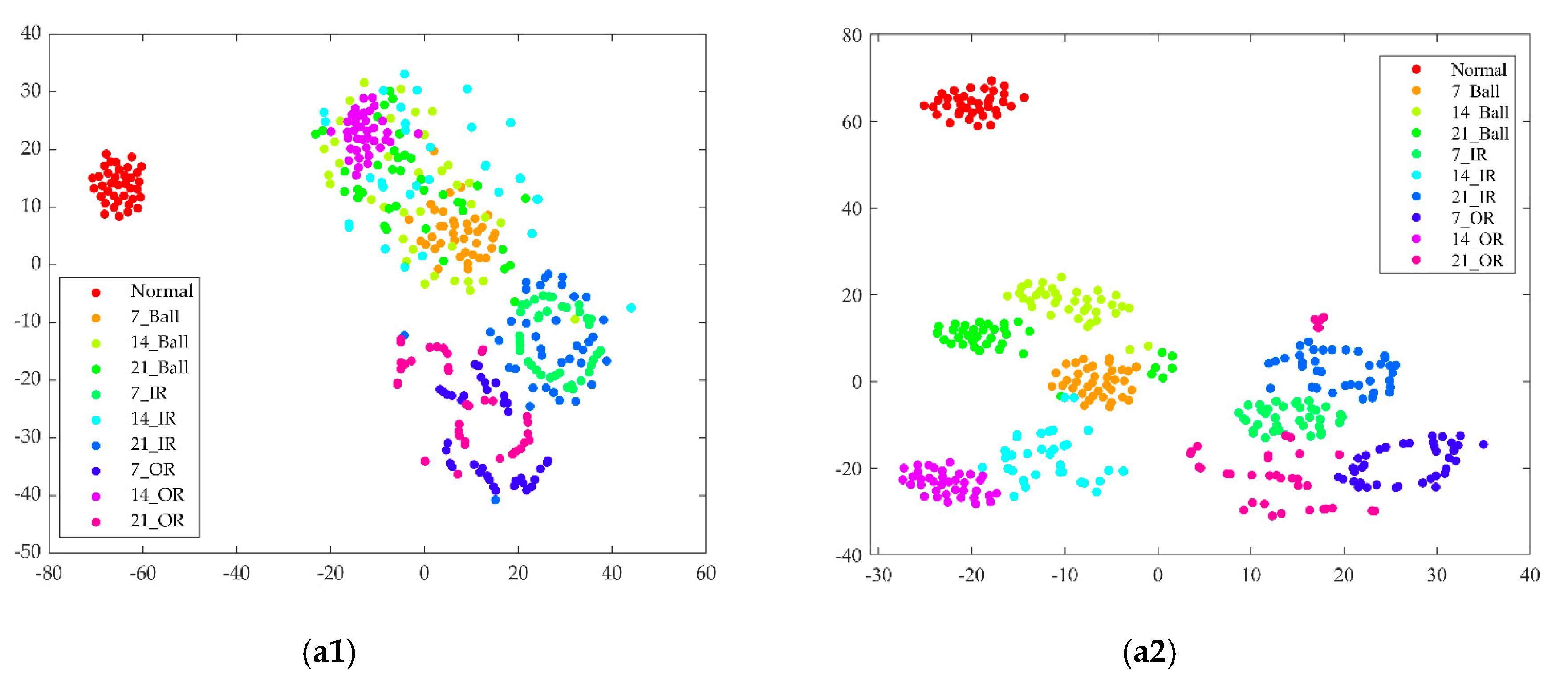
4.2.4. Feature Learning Ability
4.3. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Wang, Z.; Zhou, J.; Du, W. A novel fault diagnosis method of gearbox based on maximum kurtosis spectral entropy deconvolution. IEEE ACCESS. 2019, 7, 29520–29532. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J.; Du, W. Research and application of improved adaptive momeda fault diagnosis method. Meas. 2019, 140, 63–75. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J.; Du, W. Research on fault diagnosis of gearbox with improved variational mode decomposition. Sensors 2018, 10, 3510. [Google Scholar] [CrossRef] [PubMed]
- Gao, J.; He, X.; Yih, W.; Deng, L. Learning continuous phrase representations for translation modeling. In Proceedings of the 52nd Annual Meeting of the Association for Computational, Baltimore, MD, USA, 22–27 June 2014; pp. 699–709. [Google Scholar]
- Le, D.; Provost, E.M. Emotion recognition from spontaneous speech using hidden markov models with deep belief networks. In Proceedings of the 2013 IEEE Workshop on Automatic Speech Recognition and Understanding, Olomouc, Czech Republic, 8–12 December 2013; pp. 216–221. [Google Scholar]
- Feng, J. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72, 303–315. [Google Scholar]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Fukushima, K.; Miyake, S. Neocognitron: A new algorithm for patternrecognition tolerant of deformations and shifts in position. Pattern Recognit. 1982, 15, 455–469. [Google Scholar] [CrossRef]
- Chen, Z.Q.; Li, C.; Sanchez, R.V. Gearbox fault identication and classica-tion with convolutional neural networks. Shock Vib. 2015, 2, 1–10. [Google Scholar]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccuer, M.; Ver-stockt, S.; Walle, R.V.D.; Hoecke, S.V. Convolutional neural network based fault detection for rotating machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Wei, Z.; Peng, G.; Li, C. Bearings fault diagnosis based on convolutional neural networks with 2-d representation of vibration signals as input. Available online: https://www.matec-conferences.org/articles/matecconf/pdf/2017/09/matecconf_icmme2017_13001.pdf. (accessed on 29 April 2019).
- Yan, H.; Tang, B.; Lei, D. Multi-level wavelet packet fusion in dynamic ensemble convolutional neural network for fault diagnosis. Measurement 2018, 127, 246–255. [Google Scholar]
- Yuan, X.; Tao, Z. Fault diagnosis for rotating machinery based on con-volutional neural network and empirical mode decomposition. Shock Vib. 2017, 19, 1–12. [Google Scholar]
- Min, X.; Teng, L.; Lin, X.; Liu, L.; Silva, C.W.D. Fault diagnosis for rotat-ing machinery using multiple sensors and convolutional neural networks. IEEE/ASME Transact. Mechatron. 2017, 99, 1. [Google Scholar]
- Guo, X.; Chen, L.; Shen, C. Hierarchical adaptive deep convolution neural network and its application to bearing fault diagnosis. Measurement 2016, 93, 490–502. [Google Scholar] [CrossRef]
- Wang, F.; Jiang, H.; Shao, H.; Duan, W.; Wu, S. An adaptive deep convo-lutional neural network for rolling bearing fault diagnosis. Meas. Sci. Techn. 2017, 28, 223–237. [Google Scholar]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-time motorfault detection by 1d convolutional neural networks. IEEE Transact. Industr. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Eren, L. Bearing fault detection by one dimensional convolutional neural networks, Mathematical Problems in Engineering. Math. Probl. Eng. 2017, 2017, 1–9. [Google Scholar] [CrossRef]
- Jing, L.; Wang, T.; Zhao, M.; Wang, P. An adaptive multi-sensor data fusion method based on deep convolutional neural networks for fault diagnosis of planetary gearbox. Sensors 2017, 17, 414. [Google Scholar] [CrossRef]
- Shen, C.; Dong, W.; Kong, F.; Tse, P.W. Fault diagnosis of rotating machinery based on the statistical parameters of wavelet packet paving and a generic support vector regressive classier. Meas. J. Int. Meas. Confed. 2013, 46, 1551–1564. [Google Scholar] [CrossRef]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef]
- Wang, Z.; Han, Z.; Gu, F. A novel procedure for diagnosing multiple faults in rotating machinery. ISA trans. 2015, 55, 208–218. [Google Scholar] [CrossRef]
- Wang, Z.; He, G.; Du, W.; Zhou, J.; Han, X.; Wang, J.; He, H.; Guo, X.; Wang, J.; Kou, Y. Application of parameter optimized variational mode decomposition method in fault diagnosis of gearbox. IEEE Access. 2019, 7, 44871–44882. [Google Scholar] [CrossRef]
- Ju, C.; Bibaut, A.; Laan, M.V.D. The relative performance of ensemble methods with deep convolutional neural networks for image classication. J. Appl. Statist. 2018, 25, 2800–2818. [Google Scholar] [CrossRef]
- Lee, J.; Lee, M.; Chang, J.H. Ensemble of jointly trained deep neural network-based acoustic models for reverberant speech recognition. Digit. Signal Process. 2019, 85, 1–9. [Google Scholar] [CrossRef]
- Yin, Z.; Zhao, M.; Wang, Y.; Yang, J.; Zhang, J. Recognition of emotions using multimodal physiological signals and an ensemble deep learning model. Comput. Meth. Progr. Biomed. 2017, 140, 93–110. [Google Scholar] [CrossRef]
- Li, S.; Liu, G.; Tang, X.; Lu, J.; Hu, J. An ensemble deep convolutional neural network model with improved d-s evidence fusion for bearing fault diagnosis. Sensors 2017, 17, 1729. [Google Scholar] [CrossRef]
- Suk, H.I.; Lee, S.W.; Shen, D. Deep ensemble learning of sparse regression models for brain disease diagnosis. Med. Image Anal. 2017, 37, 101–113. [Google Scholar] [CrossRef] [PubMed]
- Choon-Young, L.; Ju-Jang, L. Adaptive control for uncertain nonlinear systems based on multiple neural networks. IEEE Trans. Syst. 2004, 34, 325–333. [Google Scholar]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- Heaton, J. Ian goodfellow, yoshua bengio, and aaron courville: Deep learning. Genet. Program. Evol. Mac. 2017, 19, 1–3. [Google Scholar] [CrossRef]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overtting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Lou, X.; Loparo, K.A. Bearing fault diagnosis based on wavelet transform and fuzzy inference. Mech. Syst. Signal Process. 2004, 18, 1077–1095. [Google Scholar] [CrossRef]
- Sun, S. Ensemble-compression: A new method for parallel training of deep neural networks. In Proceedings of the Joint European Conference on Machine Learning and Knowledge Discovery in Databases, Riva del Garda, Italy, 19–23 September 2016; pp. 187–202. [Google Scholar]
- Maaten, L.V.d.; Hinton, G. Visualizing data using t-sne. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layers | CNN | DNN | Training Parameters | ||
|---|---|---|---|---|---|
| 1 | Input layer | Input layer | 9 | Adam Batch size = 100 Learning rate = 0.0015 Epoch = 100 (ks is kernel size; kn is kernel number; s is sub-sampling rate) Dropout = 0.5 | |
| 2 | Convolution layer 1 | Ks = 5 × 1, Kn = 20, Stride = 1 | Hidden layer 1 | 20 | |
| 3 | Pooling layer | S = 2 | Hidden layer 2 | 40 | |
| 4 | Convolution layer 2 | Ks = 5 × 1, Kn = 40, Stride = 1 | Hidden layer 3 | 80 | |
| 5 | Pooling layer | S = 2 | Hidden layer 3 | 160 | |
| 6 | Fusion layer | Relu activation function | |||
| 7 | Softmax | 10 outputs | |||
| Fault Location | None | Inner Race | Outer Race | Ball | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Fault Diameter(mil) | 0 | 7 | 14 | 21 | 7 | 14 | 21 | 7 | 14 | 21 | |
| Class label | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| Dataset A | Train | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 |
| Test | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | |
| Dataset B | Train | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 |
| Test | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | |
| Dataset C | Train | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 |
| Test | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | |
| Dataset D | Train | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 |
| Test | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | 37 | |
| Max | Kurtosis | ||
| Min | Absolute mean | ||
| Peak-Peak Value | Square root amplitude | ||
| Standard deviation | Shape factor | ||
| Skewness |
| Dataset | CNNEPDNN | CNN | DNN | BPNN | ||||
|---|---|---|---|---|---|---|---|---|
| Average Accuracy | Standard Deviation | Average Accuracy | Standard Deviation | Average Accuracy | Standard Deviation | Average Accuracy | Standard Deviation | |
| A | 98.10 | 0.94 | 95.07 | 1.28 | 89.89 | 1.63 | 80.43 | 1.36 |
| B | 97.62 | 0.42 | 97.11 | 0.74 | 89.46 | 1.32 | 83.07 | 1.43 |
| C | 97.92 | 0.44 | 97.79 | 0.63 | 86.32 | 1.98 | 82.41 | 1.06 |
| D | 95.76 | 0.70 | 93.40 | 1.15 | 83.07 | 1.43 | 79.40 | 1.40 |
| Metric | Dataset A | Dataset B | Dataset C | Dataset D | ||||
|---|---|---|---|---|---|---|---|---|
| CNNEPDNN | CNN | CNNEPDNN | CNN | CNNEPDNN | CNN | CNNEPDNN | CNN | |
| Precision | 0.99 | 0.97 | 0.98 | 0.98 | 0.99 | 0.98 | 0.99 | 0.97 |
| Recall | 0.99 | 0.97 | 0.98 | 0.95 | 0.99 | 0.98 | 0.99 | 0.97 |
| F-Score | 0.99 | 0.97 | 0.98 | 0.96 | 0.99 | 0.98 | 0.99 | 0.97 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Huang, J.; Ji, S. Bearing Fault Diagnosis with a Feature Fusion Method Based on an Ensemble Convolutional Neural Network and Deep Neural Network. Sensors 2019, 19, 2034. https://doi.org/10.3390/s19092034
Li H, Huang J, Ji S. Bearing Fault Diagnosis with a Feature Fusion Method Based on an Ensemble Convolutional Neural Network and Deep Neural Network. Sensors. 2019; 19(9):2034. https://doi.org/10.3390/s19092034
Chicago/Turabian StyleLi, Hongmei, Jinying Huang, and Shuwei Ji. 2019. "Bearing Fault Diagnosis with a Feature Fusion Method Based on an Ensemble Convolutional Neural Network and Deep Neural Network" Sensors 19, no. 9: 2034. https://doi.org/10.3390/s19092034
APA StyleLi, H., Huang, J., & Ji, S. (2019). Bearing Fault Diagnosis with a Feature Fusion Method Based on an Ensemble Convolutional Neural Network and Deep Neural Network. Sensors, 19(9), 2034. https://doi.org/10.3390/s19092034