A Data-Driven Approach for the Diagnosis of Mechanical Systems Using Trained Subtracted Signal Spectrograms



Abstract
:1. Introduction
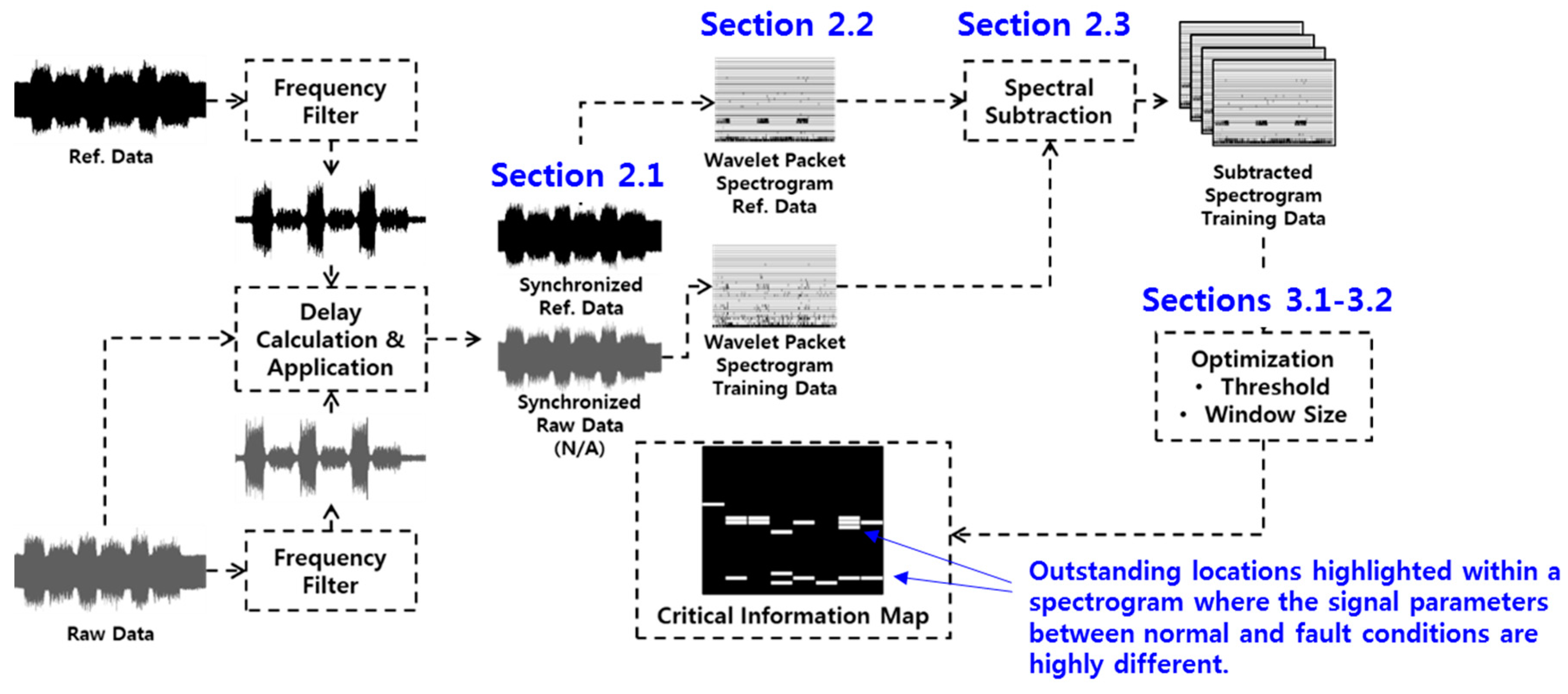
2. Critical Information Map (CIM): Pre-Processing
2.1. Data Synchronization
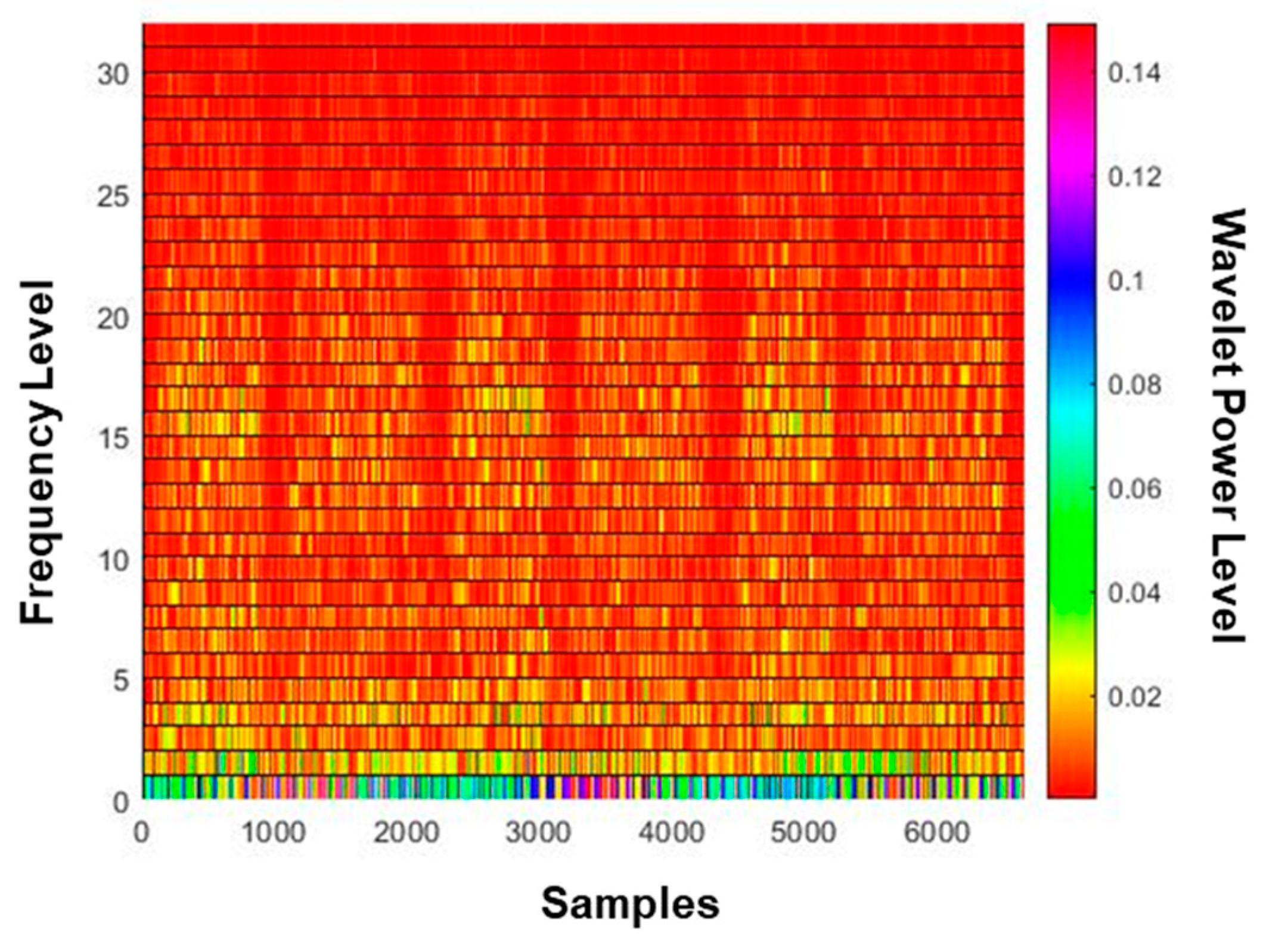
2.2. Time Frequency Representation (TFR) Transformation
2.3. Spectral Subtraction
3. Critical Information Map: Optimization
3.1. CIM Optimization (Training) Parameters
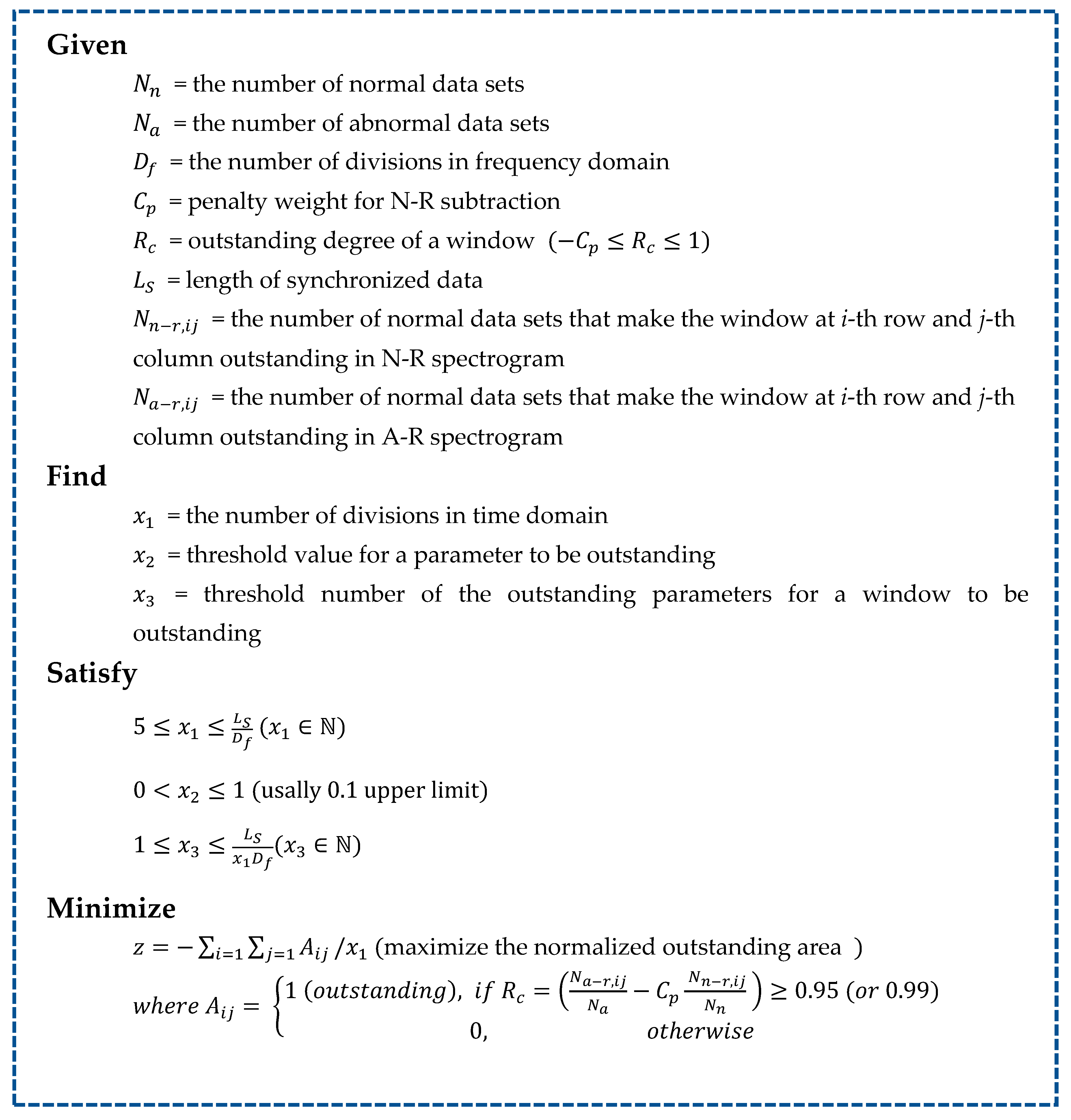
3.2. Optimization Problem Formulation
4. Case Study 1: Diagnosis of Input Gear Problems of Six-Degree-of-Freedom Manipulator
4.1. Data Acquisition Process
4.2. Data Synchronization
4.3. Wavelet Packet Decomposition (WPD) Spectrogram and Spectral Subtraction
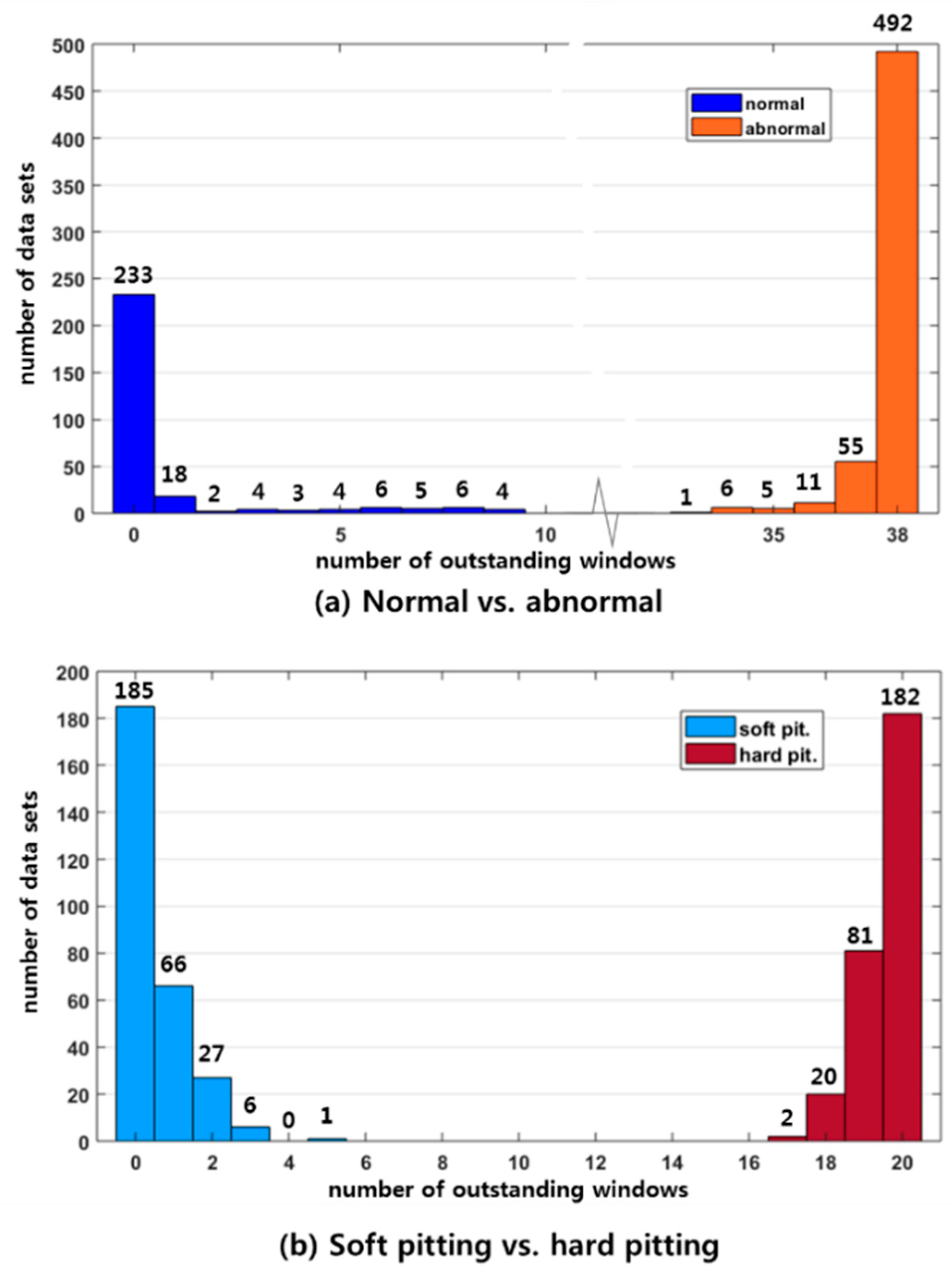
4.4. Optimization for Creating CIMs
4.5. Validation Results
5. Case Study 2: Bearing Data Set from National Aeronautics and Space Administration (NASA) Repository
5.1. Bearing Data Set
5.2. CIM and Comparison Results
6. Discussion and Closure
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| real time in raw signal | |
| time delay of signal | |
| wavelet packet kernel function | |
| wavelet packet index scale | |
| wavelet packet translation operation | |
| wavelet packet modulation parameter | |
| wavelet packet first mother function | |
| wavelet packet second mother function | |
| wavelet packet quadrature mirror filter | |
| wavelet packet quadrature mirror filter | |
| wavelet packet coefficient | |
| signal spectrum denoised by spectral subtraction | |
| raw signal spectrum | |
| noise signal spectrum | |
| wavelet spectrum denoised by spectral subtraction | |
| wavelet spectrum of raw signal | |
| wavelet spectrum of noise signal | |
| reduction factor of wavelet spectral subtraction | |
| wavelet filter location parameter | |
| wavelet filter scale parameter | |
| number of divisions in time domain | |
| threshold value for parameter to be outstanding | |
| minimum number of outstanding parameters for window to be outstanding | |
| number of outstanding windows | |
| normalized number of outstanding windows | |
| number of divisions in frequency domain | |
| penalty weight for N-R subtraction | |
| outstanding degree of window | |
| length of synchronized datasets | |
| number of normal datasets | |
| number of abnormal datasets | |
| number of normal datasets that make window at i-th row and j-th col outstanding in N-R spectrogram | |
| number of normal datasets that make window at i-th row and j-th col outstanding in A-R spectrogram | |
| counting number of i-th row and j-th col |
References
- Vichare, N.M.; Pecht, M.G. Prognostics and health management of electronics. IEEE Trans. Compon. Packag. Technol. 2006, 29, 222–229. [Google Scholar] [CrossRef]
- Qian, C.; Kim, D.-S.; Lee, D.-W. On-vehicle triboelectric nanogenerator enabled self-powered sensor for tire pressure monitoring. Nano Energy 2018, 49, 126–136. [Google Scholar] [CrossRef]
- Elforjani, M.; Mba, D. Accelerated natural fault diagnosis in slow speed bearings with acoustic emission. Eng. Fract. Mech. 2010, 77, 112–127. [Google Scholar] [CrossRef]
- Al-Ghamd, A.M.; Mba, D. A comparative experimental study on the use of acoustic emission and vibration analysis for bearing defect identification and estimation of defect size. Mech. Syst. Signal Process. 2006, 20, 1537–1571. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Wu, F.; Zhao, W.; Ghaffari, M.; Liao, L.; Siegel, D. Prognostics and health management design for rotary machinery systems—Reviews, methodology and applications. Mech. Syst. Signal Process. 2014, 42, 314–334. [Google Scholar] [CrossRef]
- Li, Y.; Li, G.; Yang, Y.; Liang, X.; Xu, M. A fault diagnosis scheme for planetary gearboxes using adaptive multi-scale morphology filter and modified hierarchical permutation entropy. Mech. Syst. Signal Process. 2018, 105, 319–337. [Google Scholar] [CrossRef]
- Santos, P.; Villa, L.F.; Reñones, A.; Bustillo, A.; Maudes, J. An SVM-based solution for fault detection in wind turbines. Sensors 2015, 15, 5627–5648. [Google Scholar] [CrossRef] [PubMed]
- Caesarendra, W.; Pratama, M.; Kosasih, P.B.; Tjahjowidodo, T.; Glowacz, A. Parsimonious Network based on Fuzzy Inference System (PANFIS) for Time Series Feature Prediction of Low Speed Slew Bearing Prognosis. Appl. Sci. 2018, 8, 2656. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Guo, L.; Li, N.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Benmoussa, S.; Djezir, M.A. Remaining useful life estimation without needing for prior knowledge of the degradation features. IEEE IET Sci. Meas. Technol. 2017, 11, 1071–1078. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part II: Fault diagnosis with knowledge-based and hybrid/active approaches. IEEE Trans. Ind. Electron. 2015, 62, 3768–3774. [Google Scholar] [CrossRef]
- Luo, Y.; Baddour, N.; Liang, M. A shape-independent approach to modelling gear tooth spalls for time varying mesh stiffness evaluation of a spur gear pair. Mech. Syst. Signal Process. 2018, 120, 836–852. [Google Scholar] [CrossRef]
- Endo, H.; Randall, R.B.; Gosselin, C. Differential diagnosis of spall vs. cracks in the gear tooth fillet region: Experimental validation. Mech. Syst. Signal Process. 2009, 23, 636–651. [Google Scholar] [CrossRef]
- Park, J.; Ha, J.M.; Oh, H.; Youn, B.D.; Choi, J.; Kim, N.H. Model-based fault diagnosis of a planetary gear: A novel approach using transmission error. IEEE Trans. Reliab. 2016, 65, 1830–1841. [Google Scholar] [CrossRef]
- Lebold, M.; McClintic, K.; Campbell, R.; Byington, C.; Maynard, K. Review of vibration analysis methods for gearbox diagnostics and prognostics. In Proceedings of the 54th Meeting of the Society for Machinery Failure Prevention Technology, Virginia Beach, VA, USA, 1–4 May 2000. [Google Scholar]
- He, W.; Miao, Q.; Azarian, M.; Pecht, M. Health monitoring of cooling fan bearings based on wavelet filter. Mech. Syst. Signal Process. 2015, 64, 149–161. [Google Scholar] [CrossRef]
- Henriquez, P.; Alonso, J.B.; Ferrer, M.A.; Travieso, C.M. Review of automatic fault diagnosis systems using audio and vibration signals. IEEE Trans. Syst. Man Cybern. Syst. 2014, 44, 642–652. [Google Scholar] [CrossRef]
- Cerrada, M.; Zurita, G.; Cabrera, D.; Sánchez, R.-V.; Artés, M.; Li, C. Fault diagnosis in spur gears based on genetic algorithm and random forest. Mech. Syst. Signal Process. 2016, 70–71, 87–103. [Google Scholar] [CrossRef]
- Wuest, T.; Weimer, D.; Irgens, C.; Thoben, K.D. Machine learning in manufacturing: Advantages, challenges, and applications. Prod. Manuf. Res. 2016, 4, 23–45. [Google Scholar] [CrossRef]
- Razavi-Far, R.; Zanjani, M.; Saif, M. An integrated class-imbalance learning scheme for diagnosing bearing defects in induction motors. IEEE Trans. Ind. Inf. 2017, 13, 2758–2769. [Google Scholar] [CrossRef]
- Kwon, D.; Hodkiewicz, M.R.; Fan, J.; Shibutani, T.; Pecht, M.G. IoT-Based Prognostics and Systems Health Management for Industrial Applications. IEEE Access 2016, 27, 3659–3670. [Google Scholar] [CrossRef]
- Papoulis, A. The Fourier Integral and Its Applications, 1st ed.; McGraw-Hill: New York, NY, USA, 1962; pp. 244–253. ISBN 0070484473. [Google Scholar]
- Tabrizi, A.; Garibaldi, L.; Fasana, A.; Marchesiello, S. Early damage detection of roller bearings using wavelet packet decomposition, ensemble empirical mode decomposition and support vector machine. Adv. Dyn. Stab. Control Mech. Syst. 2014, 50, 865–874. [Google Scholar] [CrossRef]
- Peng, Z.; Chu, F. Application of the wavelet transform in machine condition monitoring and fault diagnostics: A review with bibliography. Mech. Syst. Signal Process. 2004, 18, 199–221. [Google Scholar] [CrossRef]
- Verstraete, D.; Ferrada, A.; Droguett, E.L.; Meruane, V.; Modarres, M. Deep learning enabled fault diagnosis using time-frequency image analysis of rolling element bearings. Shock Vib. 2017, 2017, 5067651. [Google Scholar] [CrossRef]
- Yen, G.G.; Lin, K.-C. Wavelet packet feature extraction for vibration monitoring. IEEE Trans. Ind. Electron. 2000, 47, 650–667. [Google Scholar] [CrossRef] [Green Version]
- Berouti, M.; Schwartz, R.; Makhoul, J. Enhancement of speech corrupted by acoustic noise. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Washington, DC, USA, 2–4 April 1979. [Google Scholar]
- Denda, Y.; Nishiura, T.; Kawahara, H.; Irino, T. Speech recognition with wavelet spectral subtraction in real noisy environment. In Proceedings of the 7th International Conference on Signal Processing, Beijing, China, 31 August–4 September 2004. [Google Scholar]
- El Bouchikhi, E.; Choqueuse, V.; Benbouzid, M.E. Current Frequency Spectral Subtraction and Its Contribution to Induction Machines’ Bearings Condition Monitoring. IEEE Trans. Energy Convers. 2013, 28, 135–144. [Google Scholar] [CrossRef] [Green Version]
- Lee, Y.; Han, S.; Jang, S.; Kim, W.; Choi, H.-J.; Choi, S.-K. Multidisciplinary materials and geometry optimization of superheater tubes for advanced ultra-supercritical power boilers. J. Mech. Sci. Technol. 2018, 32, 3359–3369. [Google Scholar] [CrossRef]
- Staufer, P.; Gattringer, H. State estimation on flexible robots using accelerometers and angular rate sensors. Mechatronics 2012, 22, 1043–1049. [Google Scholar] [CrossRef]
- Yu, J. Health Condition Monitoring of Machines Based on Hidden Markov Model and Contribution Analysis. IEEE Trans. Instrum. Meas. 2012, 8, 2200–2211. [Google Scholar] [CrossRef]
- Qiu, H.; Lee, J.; Lin, J.; Yu, G. Robust performance degradation assessment methods for enhanced rolling element bearing prognostics. Adv. Eng. Inform. 2003, 17, 127–140. [Google Scholar] [CrossRef]
- Eren, L. Bearing Fault Detection by One-Dimensional Convolutional Neural Networks. Math. Probl. Eng. 2017, 2017, 8617315. [Google Scholar] [CrossRef]
- Stralen, K.J.V.; Stel, V.S.; Reisma, J.B.; Dekker, F.W.; Zoccali, C.; Jager, K.J. Diagnostic methods I: Sensitivity, specificity, and other measures of accuracy. Kidney Int. 2009, 75, 1257–1263. [Google Scholar] [CrossRef] [PubMed]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Properties |
|---|---|
| Sensitivity of Sensor | 10 mV/g |
| Sampling Frequency | 12,800 sample/s |
| Acquired duration | 20 s |
| Data Length | 256,000 sample points |
| Normal data | 300 datasets |
| Hard pitting data | 300 datasets |
| Soft pitting data | 300 datasets |
| Design Variables of CIMs | CIM (N-R vs. A-R) | CIM (S-R vs. H-R) |
|---|---|---|
| : the number of divisions in time domain | 19 | 7 |
| : threshold value for a parameter to be outstanding | 0.0089 | 0.0224 |
| : the minimum number of outstanding parameters for a window to be outstanding | 49 | 9 |
| CIMs Design Variable | CIM (N-R vs. A-R), Bearing Case |
|---|---|
| 5 | |
| 0.2658 | |
| 4 |
| Method | Ground Truth | ||
|---|---|---|---|
| Normal | Abnormal | ||
| Classification result of CIM | Normal | 500 (TN) | 0 (FP) |
| Abnormal | 0 (FN) | 500 (TP) | |
| Classification result of 1D CNN | Normal | 472 (TN) | 28 (FP) |
| Abnormal | 1 (FN) | 499 (TP) | |
| Method | Fault Detection | |||
|---|---|---|---|---|
| Accuracy | Sensitivity | Specificity | Precision | |
| Proposed CIM | 100 | 100 | 100 | 100 |
| 1D CNN | 97.1 | 99.8 | 94.4 | 94.7 |
| FFT-MLP | 95.0 | 100 | 90.0 | 90.9 |
| FFT-RBFN | 96.0 | 100 | 92.0 | 92.6 |
| FFT-SVM | 94.5 | 99.0 | 90.0 | 90.8 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huh, J.; Pham Van, H.; Han, S.; Choi, H.-J.; Choi, S.-K. A Data-Driven Approach for the Diagnosis of Mechanical Systems Using Trained Subtracted Signal Spectrograms. Sensors 2019, 19, 1055. https://doi.org/10.3390/s19051055
Huh J, Pham Van H, Han S, Choi H-J, Choi S-K. A Data-Driven Approach for the Diagnosis of Mechanical Systems Using Trained Subtracted Signal Spectrograms. Sensors. 2019; 19(5):1055. https://doi.org/10.3390/s19051055
Chicago/Turabian StyleHuh, Jiung, Huan Pham Van, Soonyoung Han, Hae-Jin Choi, and Seung-Kyum Choi. 2019. "A Data-Driven Approach for the Diagnosis of Mechanical Systems Using Trained Subtracted Signal Spectrograms" Sensors 19, no. 5: 1055. https://doi.org/10.3390/s19051055
APA StyleHuh, J., Pham Van, H., Han, S., Choi, H. -J., & Choi, S. -K. (2019). A Data-Driven Approach for the Diagnosis of Mechanical Systems Using Trained Subtracted Signal Spectrograms. Sensors, 19(5), 1055. https://doi.org/10.3390/s19051055