An Efficient Relayed Broadcasting Based on the Duplication Estimation Model for IoT Applications



Abstract
:1. Introduction
- We present the duplication ratio as a systematic and unified criterion for relay suppression and compensation. We also propose a simple and practical method to approximate it.
- As well as decreasing the redundancy, the proposed mechanism improves the reliability of flooding by combining duplication suppression and re-queuing schemes.
- The proposed mechanism is totally decoupled from the channel access mechanism of WLAN and works in a distributed manner without incurring a signaling overhead or relying on a feedback mechanism. Moreover, it does not require adjusting control parameters depending on network conditions.
2. Statement of the Problem
2.1. Motivation and Challenges
- Each node should determine whether or not to relay a frame by only overhearing the transmission of adjacent nodes. Thus, a specific criterion for this decision should be established.
- The reliability of traffic dissemination should be provided at an acceptable level without incurring severe duplicate transmissions or increasing the dissemination time significantly.
- As well as collisions, the interference from hidden nodes should be taken into account, which is another main cause of reliability degradation but has not been adequately considered in most existing studies.
2.2. Related Work
- Our flooding mechanism provides a unified solution to the broadcast storm problem and early die-out by combining the duplication suppression scheme and re-queuing scheme. The former discards unnecessary duplicate frames in a proactive way, whereas the latter retransmits selected frames in a reactive way. In both schemes, the novel criterion called the duplication ratio is used.
- Unlike the previous flooding mechanisms, the proposed mechanism does not need to tune several control parameters or to determine their optimal values under different network conditions. Therefore, it provides the robust performance to the change of network conditions.
- Our mechanism is completely free from any feedback information or signaling between nodes, so it neither requires a dedicated control frame nor incurs a signaling overhead, which is a crucial feature in the broadcasting to many nodes.
3. Duplication Suppression and Re-Queuing
3.1. The Definition and Characteristics of the Duplication Ratio
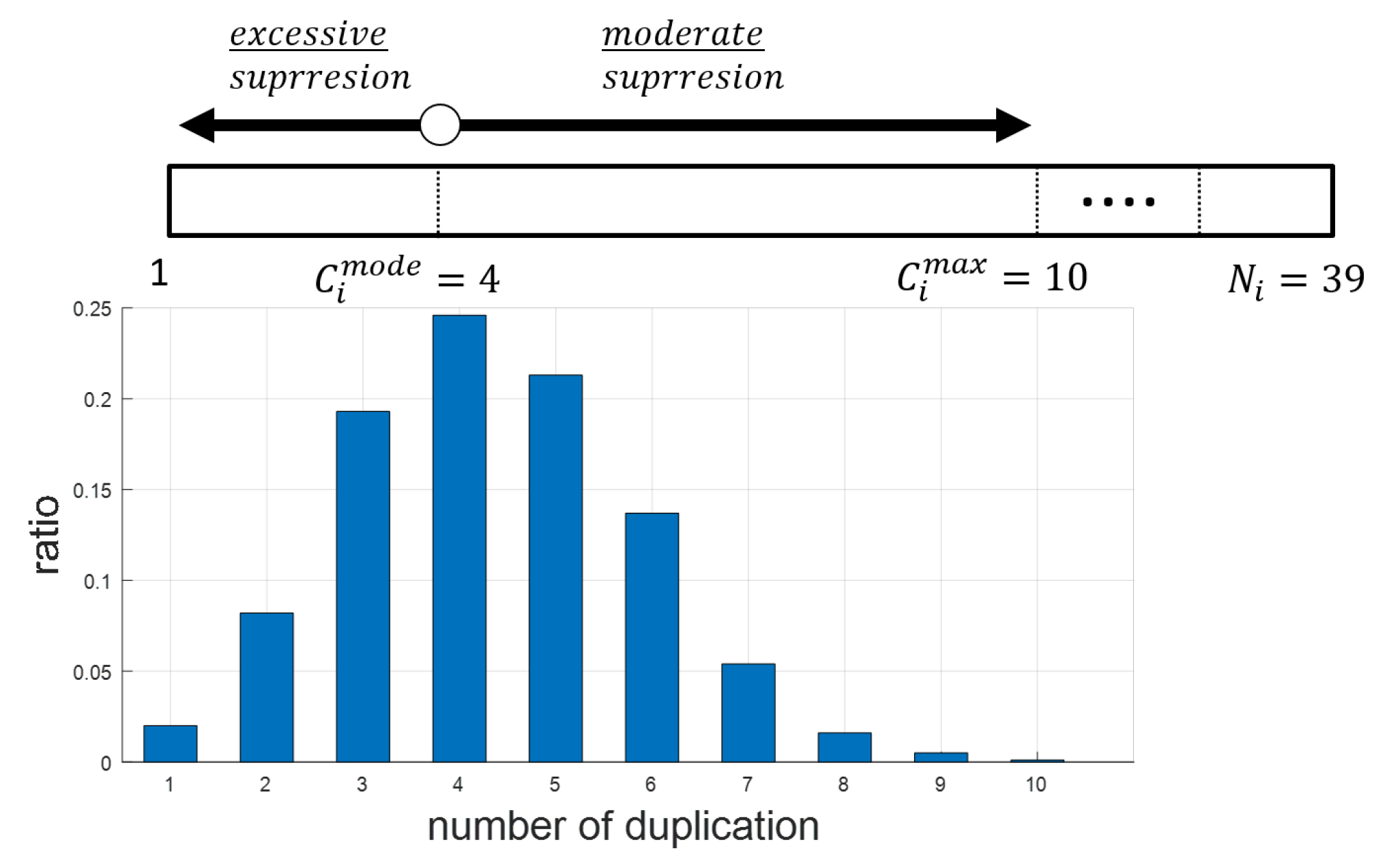
3.1.1. The Duplication Index and the Duplication Ratio
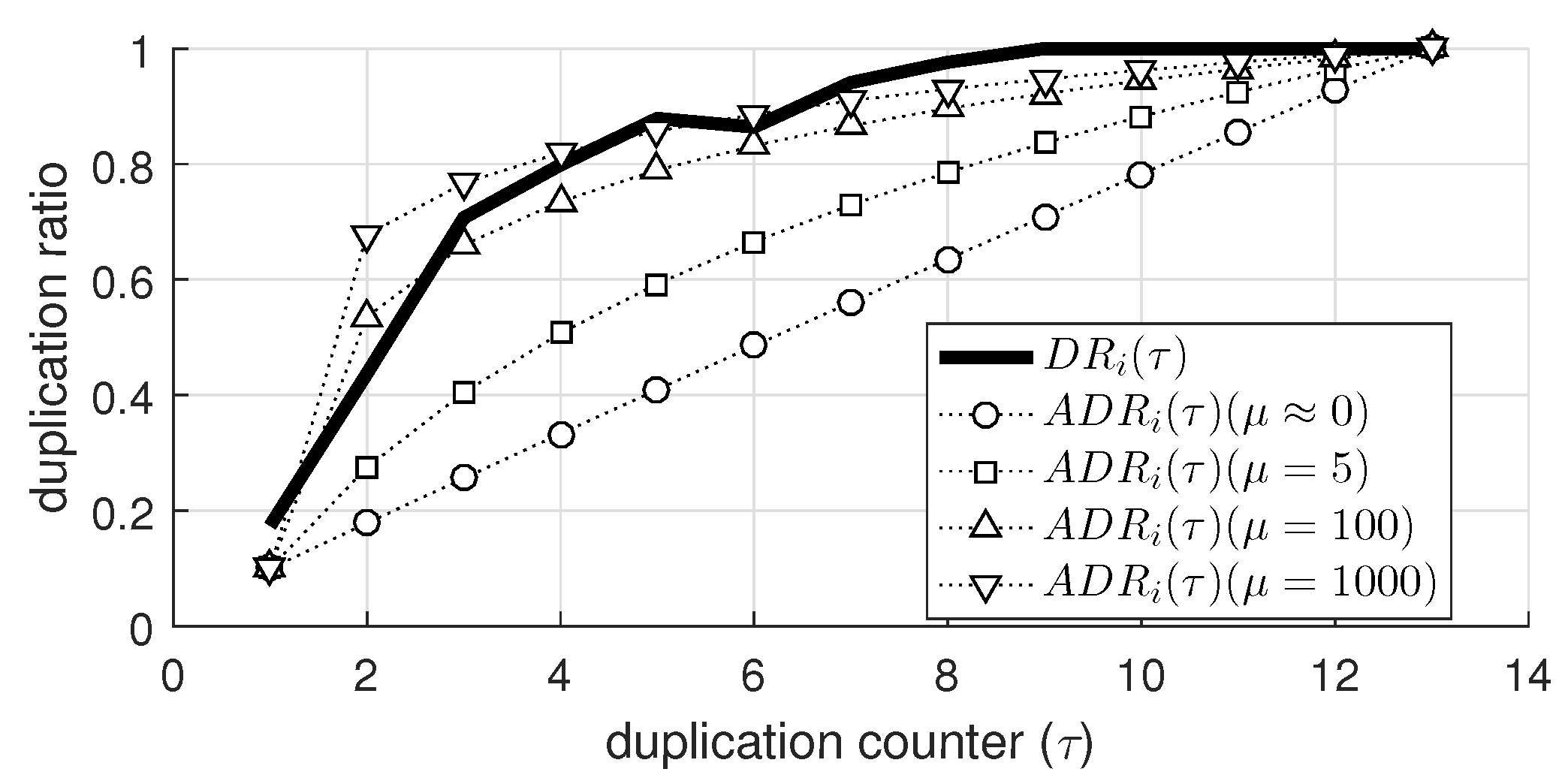
3.1.2. The Approximation of the Duplication Ratio
3.2. Redundancy Suppression with Duplication Ratio
| Algorithm 1: The redundancy suppression scheme based on the duplication ratio. |
 |
3.3. Re-Queuing to Compensate for Delivery Failure
3.3.1. The Selection Criterion for Re-Queuing Frames
3.3.2. Frame Observation Period for Re-Queuing
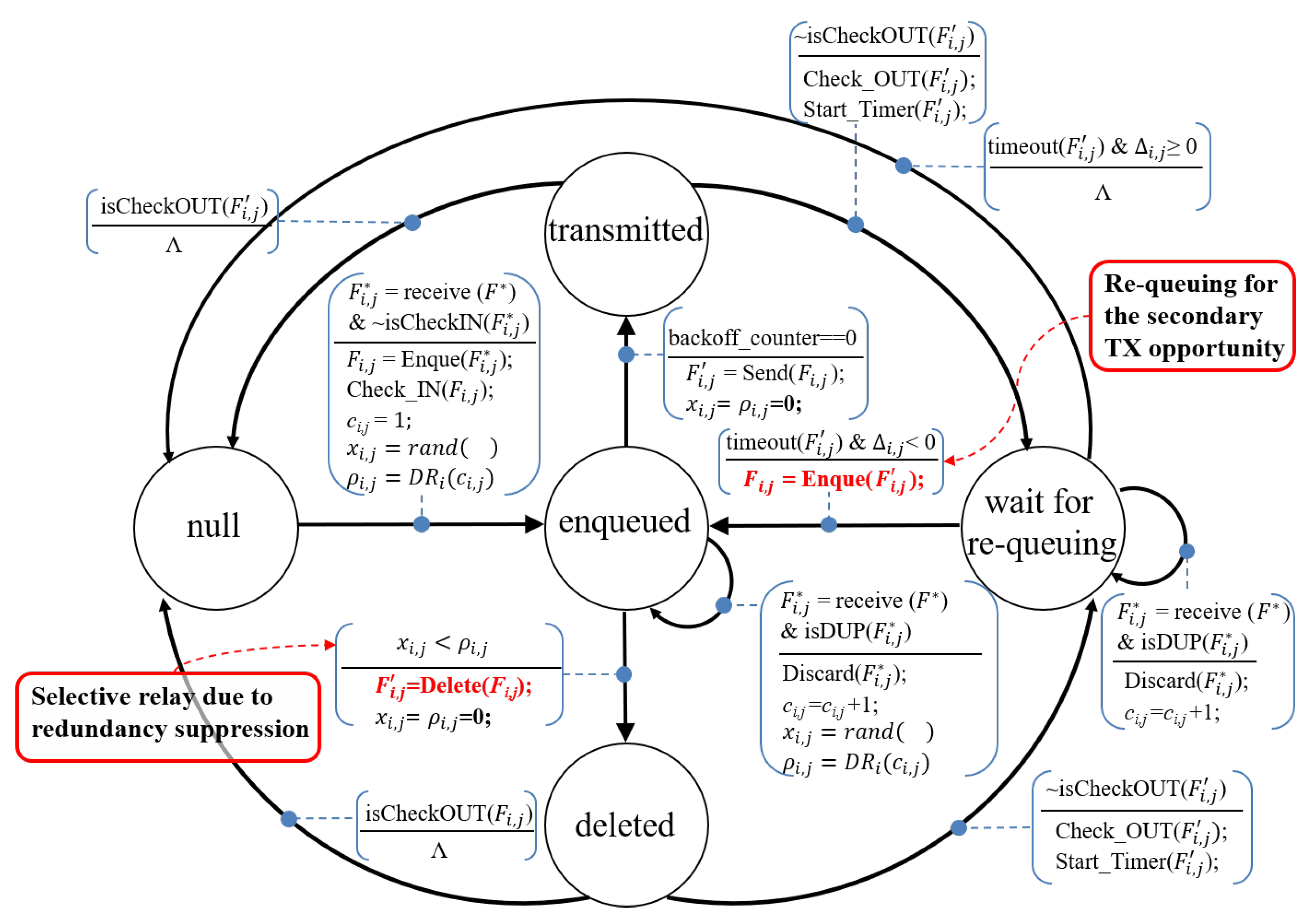
3.4. The Implementation of the Proposed Mechanism
- The null state: This is either the initial or final state of the frame: the former is the state when node i has not yet received frame whereas the latter is when it has finished all of the operations for this frame. If an unidentified frame arrives at the node, function receive() is invoked to identify frame by checking its sequence number. Function isCheckIN() returns true if the frame has already been enqueued more than once. If frame is a new frame (i.e., isCheckIN() is false), then the frame is enqueued and its duplication counter is initialized to 1. Moreover, function check_IN() indicates that the frame whose sequence number is j has entered the transmission buffer. After performing these operations, the state of the frame is switched to the enqueued state. Two initialized variables and denote the random variable and the duplication ratio, respectively, and they are used to determine whether the frame in the transmission buffer is deleted or not after entering to the enqueued state.
- The enqueued state: In this state, the frame waits in the buffer for transmission and its state is changed to either the transmitted or deleted state. If the backoff counter becomes 0 and frame remains in the buffer, it is transmitted by the Send() function. If the node receives another frame that is a duplicate (i.e., isDUP() is true), it discards and updates the corresponding , , and . Moreover, the node deletes frame waiting for transmission in the buffer depending on and (i.e., duplication ratio ) using the Delete() function. Please note that the re-queued frame may also be deleted or transmitted again depending on the duplication ratio. Meanwhile, when function Send() or Delete() is called, the state of frame with the sequence number j is changed from to , and and are initialized to 0.
- The transmitted and deleted states: If the state transition from the transmitted or deleted to the wait for re-queuing state has never happened (i.e., isCheckOUT() is false), the re-queuing process is initiated by function Start_Timer() and function check_OUT() indicates that the frame whose sequence number is j has been transmitted or deleted at least once. If isCheckOUT() is true, no further operation is performed on the frame and the state is changed to null.
- The wait for re-queuing state: In this state, the re-queuing procedure controls the frame (a copy of ). After the frame observation period has expired (i.e., timeout() is true), the state is switched to either enqueued or null depending on the value of . If 0, the frame is re-queued to obtain a secondary transmission opportunity; otherwise, the node completes all of the operations for this frame. On receiving the ADF, the node discards it and updates .
4. Simulation Study
4.1. Simulation Configuration
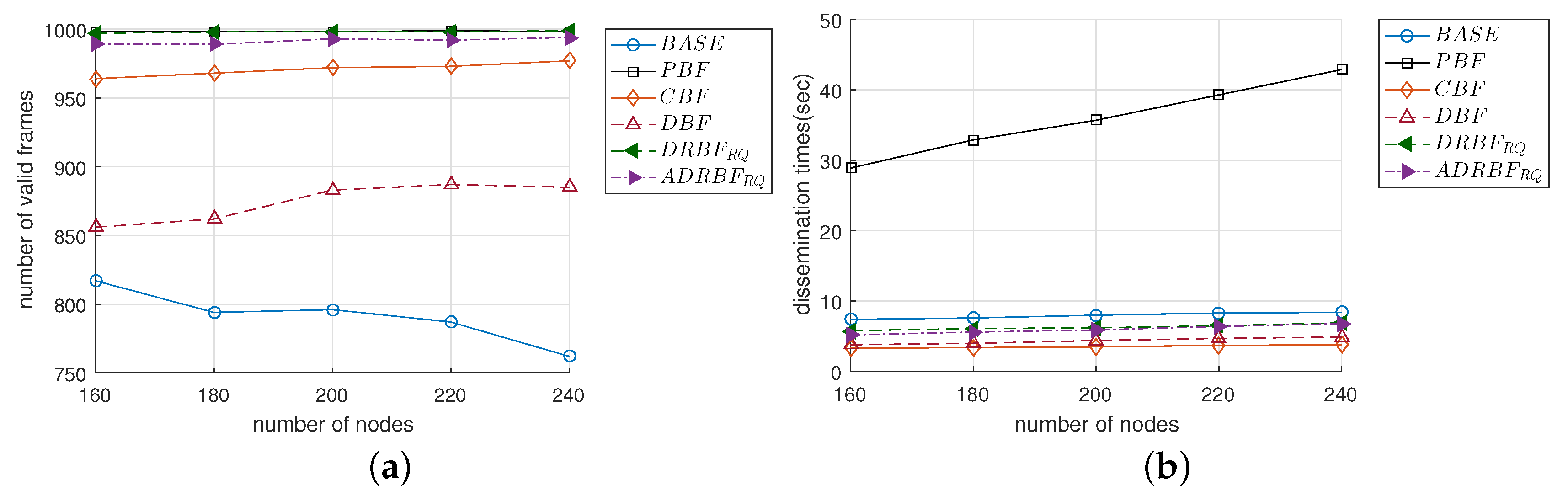
- BASE: This is a simple baseline flooding mechanism; all the received duplicate frames are discarded but all the new frames received successfully are transmitted without being suppressed.
- CBF: This is a conventional counter-based flooding scheme and the counter threshold was set to 2 (The threshold value has a significant impact on the performance of CBF. According to [10], its optimal value becomes a lower value when the topology is denser. We also verified that its performance was the best in most simulations when the threshold was 2).
- PBF: As proposed in our previous work [11], this mechanism sets the transmission probability as inversely proportional to the number of adjacent nodes (i.e., ). If a duplicate transmission is suppressed, this mechanism defers the transmission of the frame instead of dropping it to improve the reliability of flooding.
- DBF: In this mechanism, each node rebroadcasts the received frames with three differentiated probabilities depending on the distance from the sender. It used three equal distances divided from the maximum transmission distance (), as described in [19].
- , : They are the proposed mechanisms implementing the duplication suppression scheme and the re-queuing scheme as proposed in Section 3.2 and Section 3.3, respectively. The duplication ratio in (2) was used in whereas the approximated one in (3) was used in (We determined the values of and heuristically after performing many simulations under various configurations). Meanwhile, DRBF and ADRBF denote mechanisms that the re-queuing scheme without the re-queuing scheme.
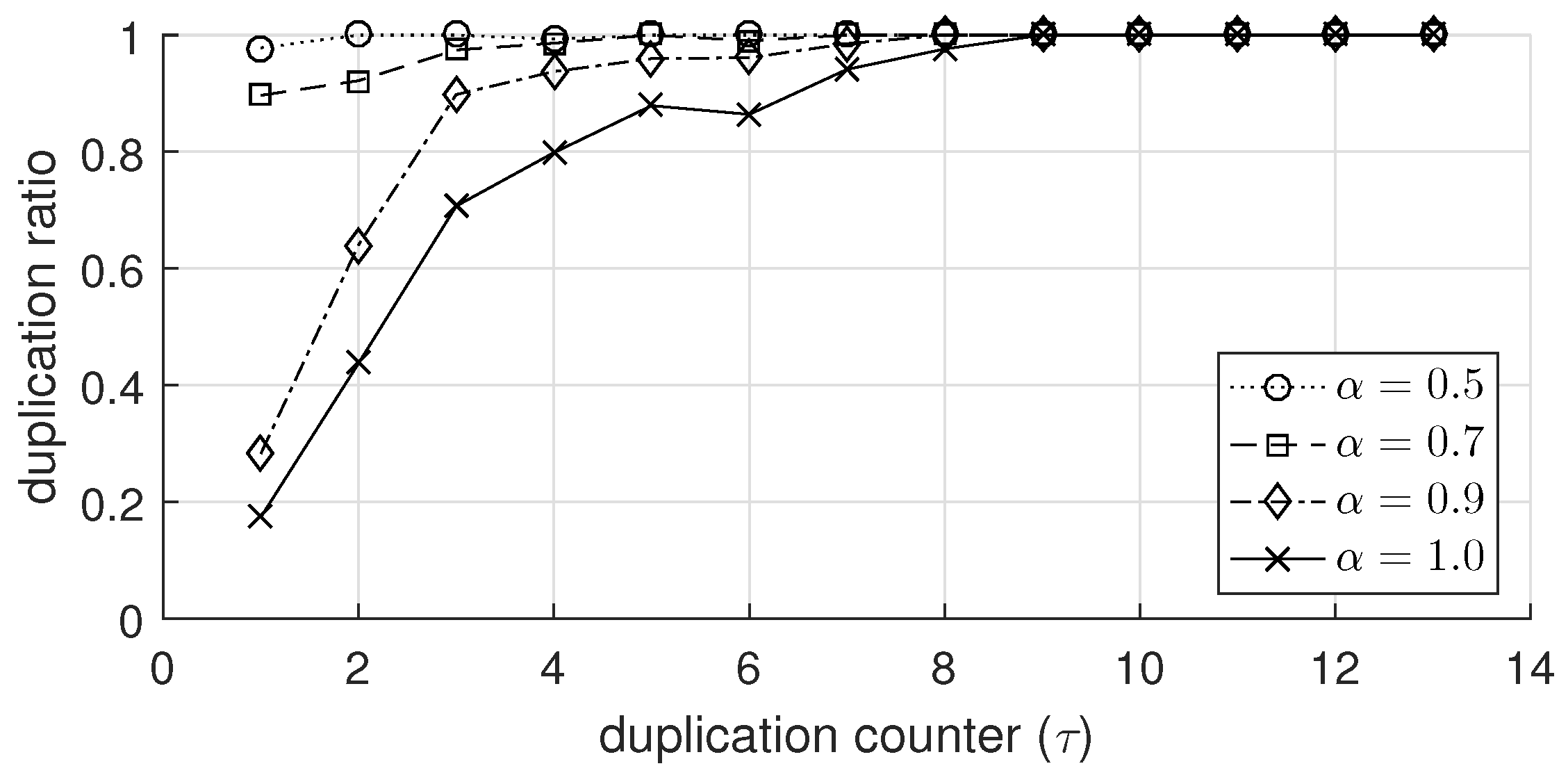
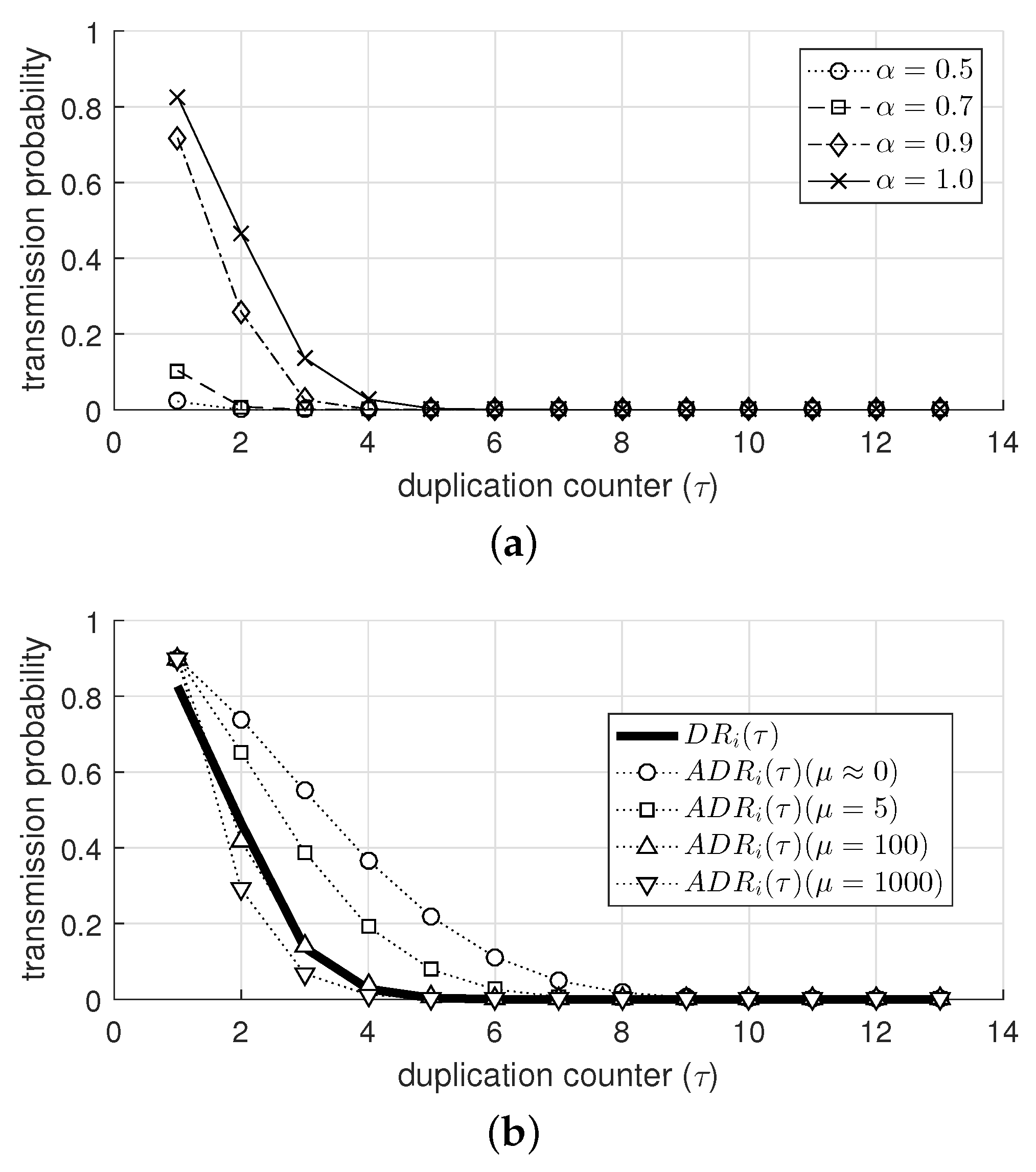
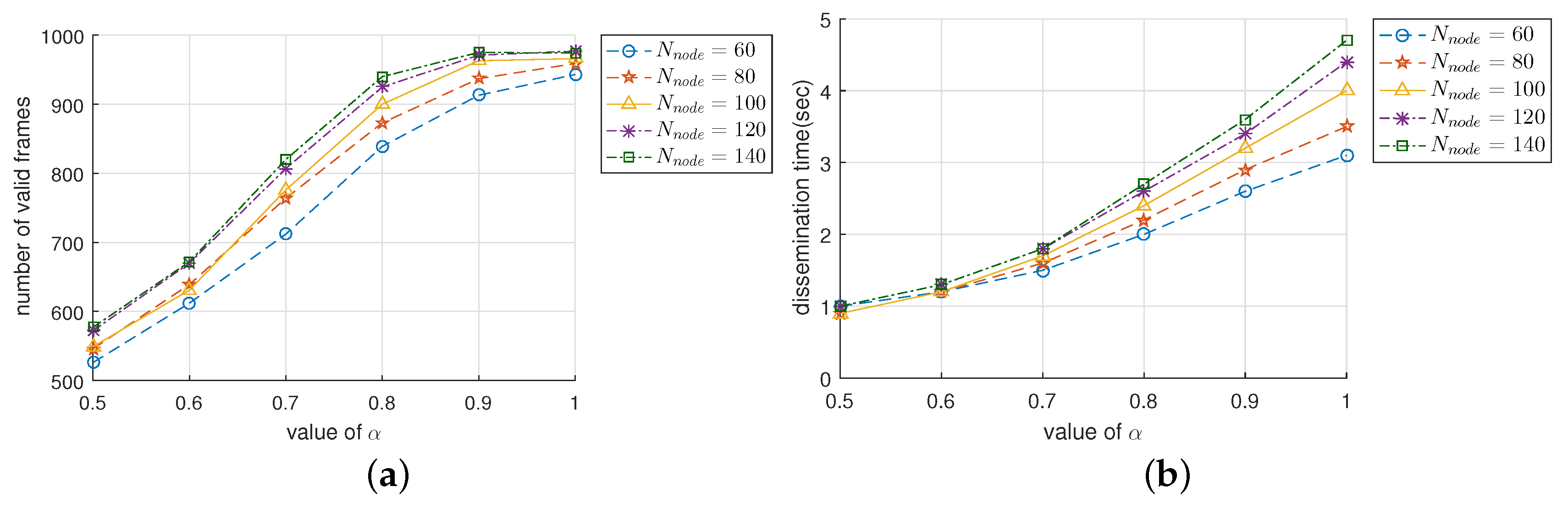
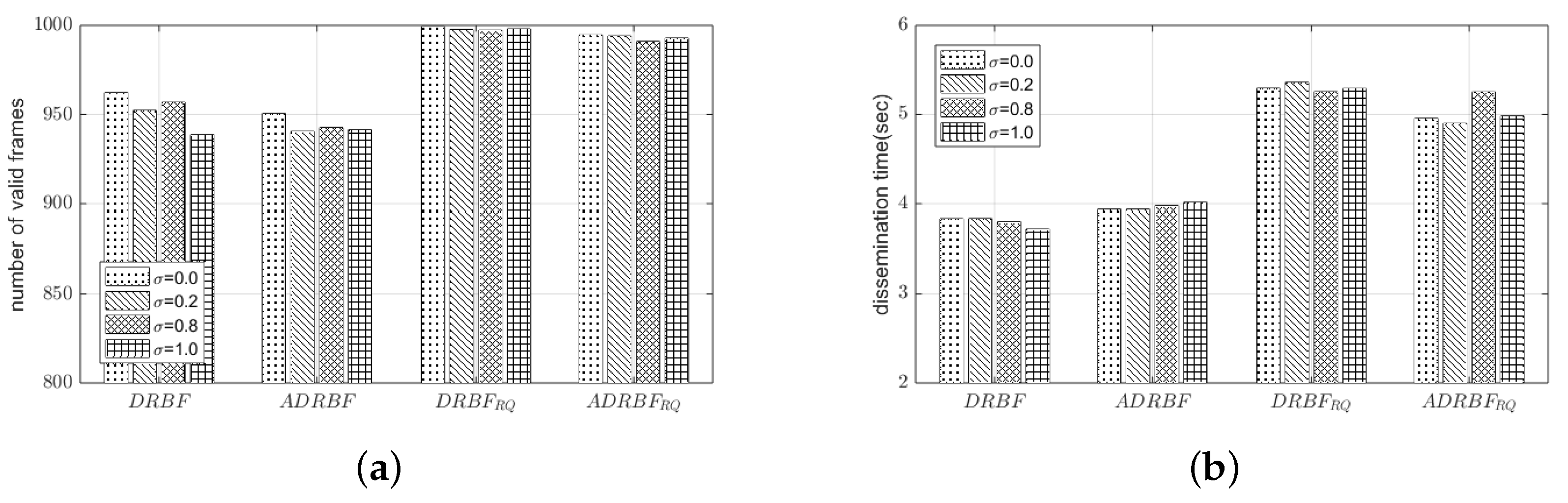
4.2. The Effect of the Duplication-Index-Decision Factor
- When the value of is small (e.g., 0.5), the increase in is considerably effective at improving the reliability in terms of while somewhat degrading the performance of fast traffic dissemination in terms .
- When the value of is large (e.g., more than 0.9), the increase in slightly increases but notably increases .
- It is desirable to set close to 1 for applications that are primarily intended to ensure the reliability strictly (Apart from increasing , the reliability of flooding can be further improved by adopting a proper coding technique in the application layer (e.g., erasure coding or digital fountain [43])). whereas it is better to set as a relatively small value if the quality-of-service (QoS) of applications largely depends on the latency.
4.3. A Performance Comparison of the Various Flooding Mechanisms
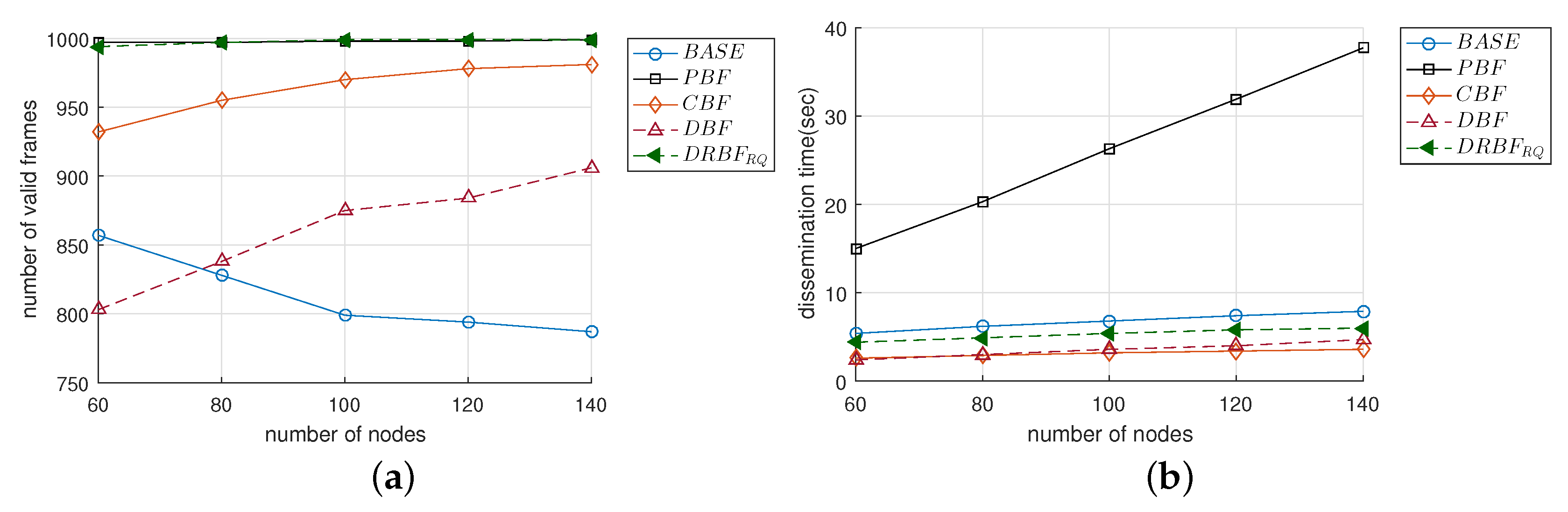
4.3.1. The Number of Valid Frames and Dissemination Time
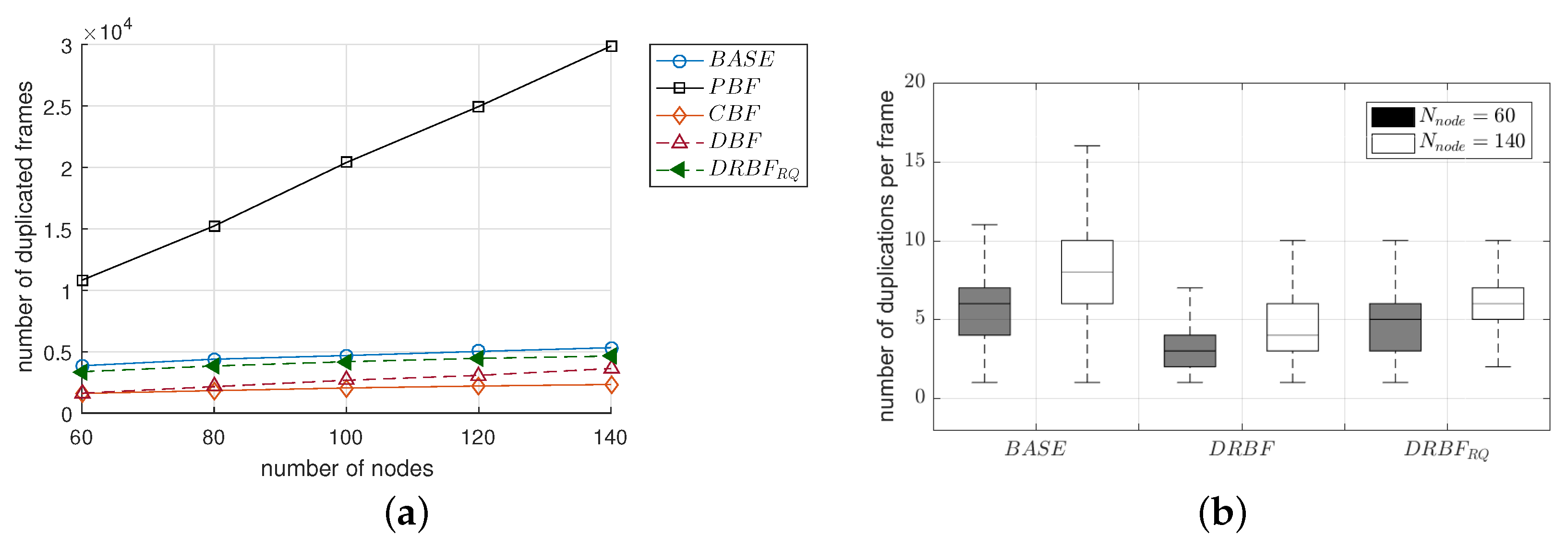
4.3.2. The Number of Duplicate Frames
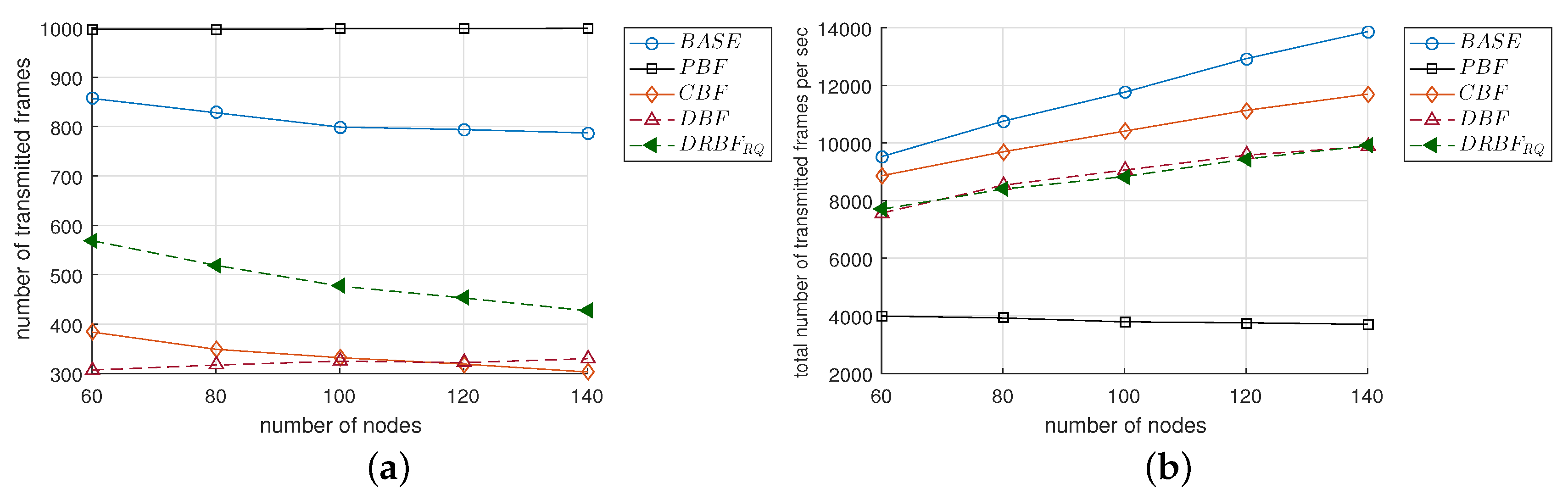
4.3.3. Channel Access Contention
4.4. The Effect of Re-Queuing Scheme
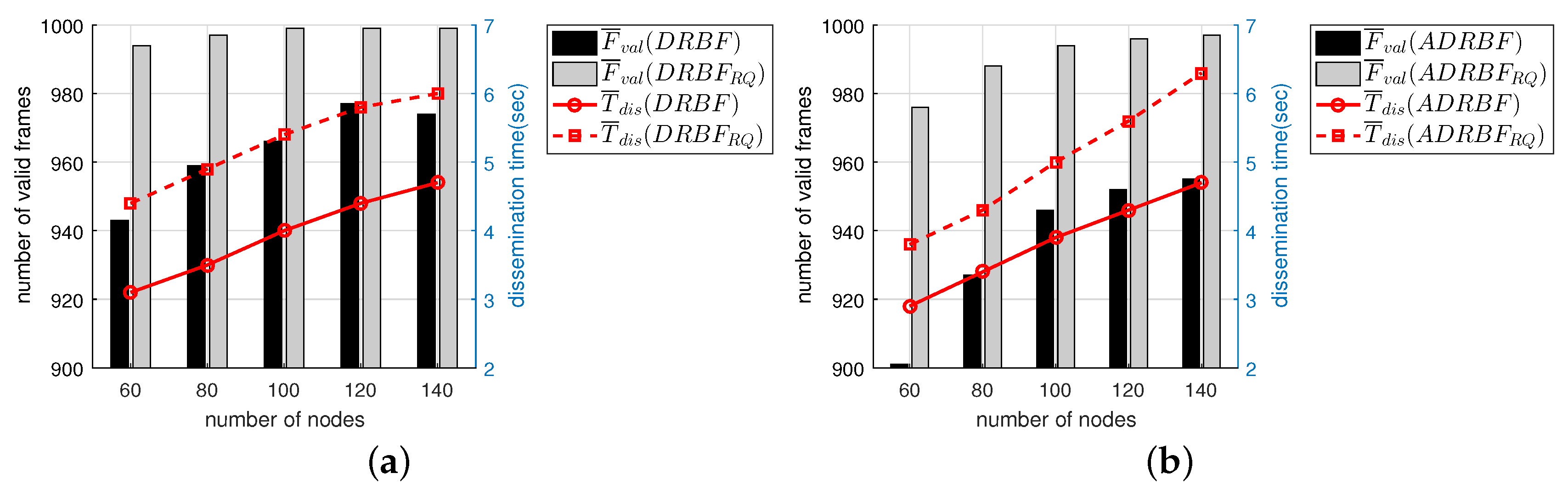
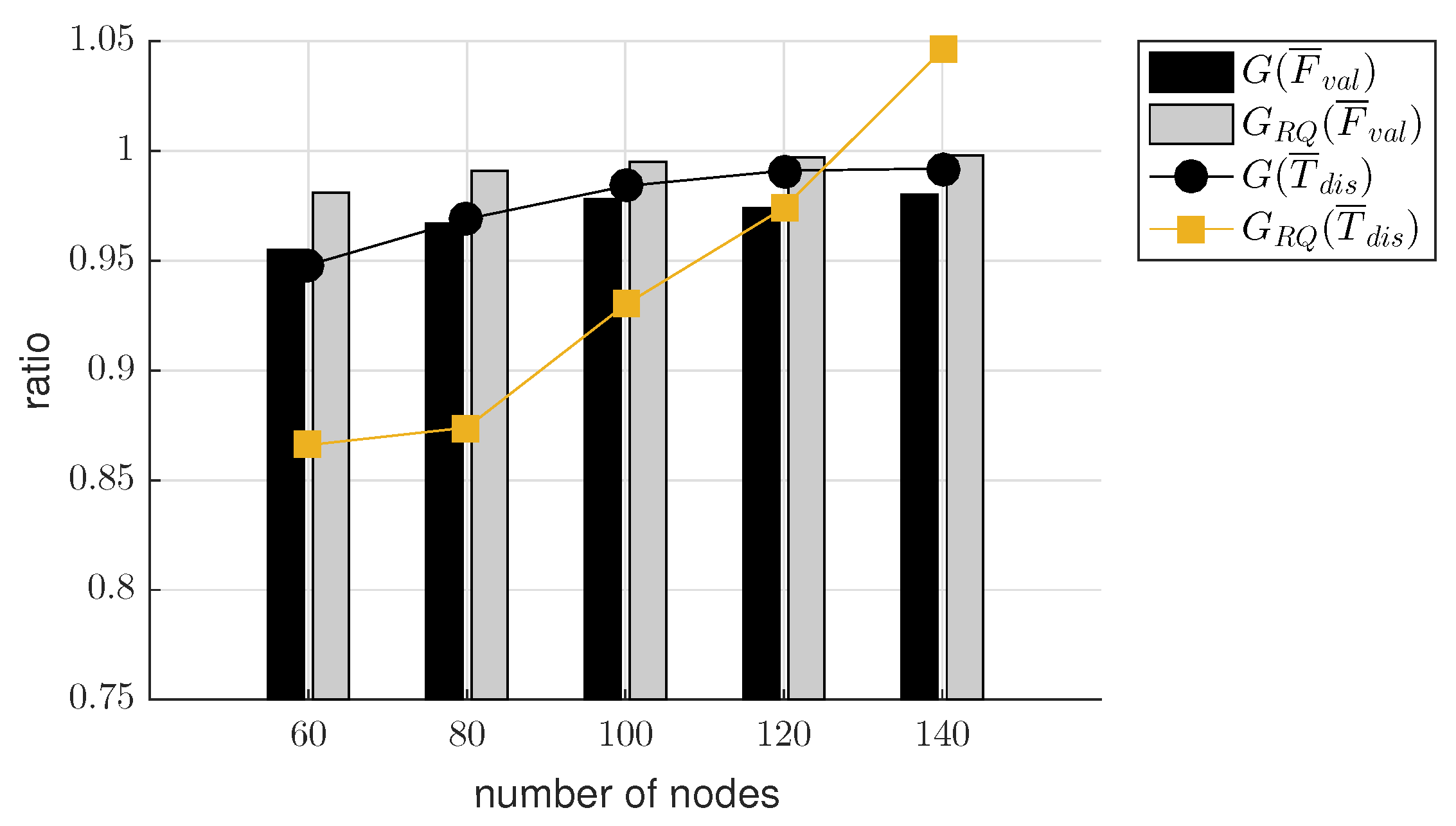
4.5. The Effect of the Duplication Ratio Approximation
- The average values of and were 0.971 and 0.993, respectively, confirming that the reliability of flooding hardly deteriorated due to the approximation error of the duplication ratio. Moreover, its influence diminished as the node density increased or the re-queuing scheme was applied, i.e., 1.
- The average value of was 0.977, meaning that the average traffic dissemination time of ADRBF is comparable to that of DRBF, i.e., the approximation of the duplication ratio has a negligible effect on the traffic dissemination time. Even with the approximation error, of was usually smaller or slightly higher than ; i.e., the average value of was 0.938.
4.6. The Effect of the Node Mobility
4.7. The Effect of the Network Scale
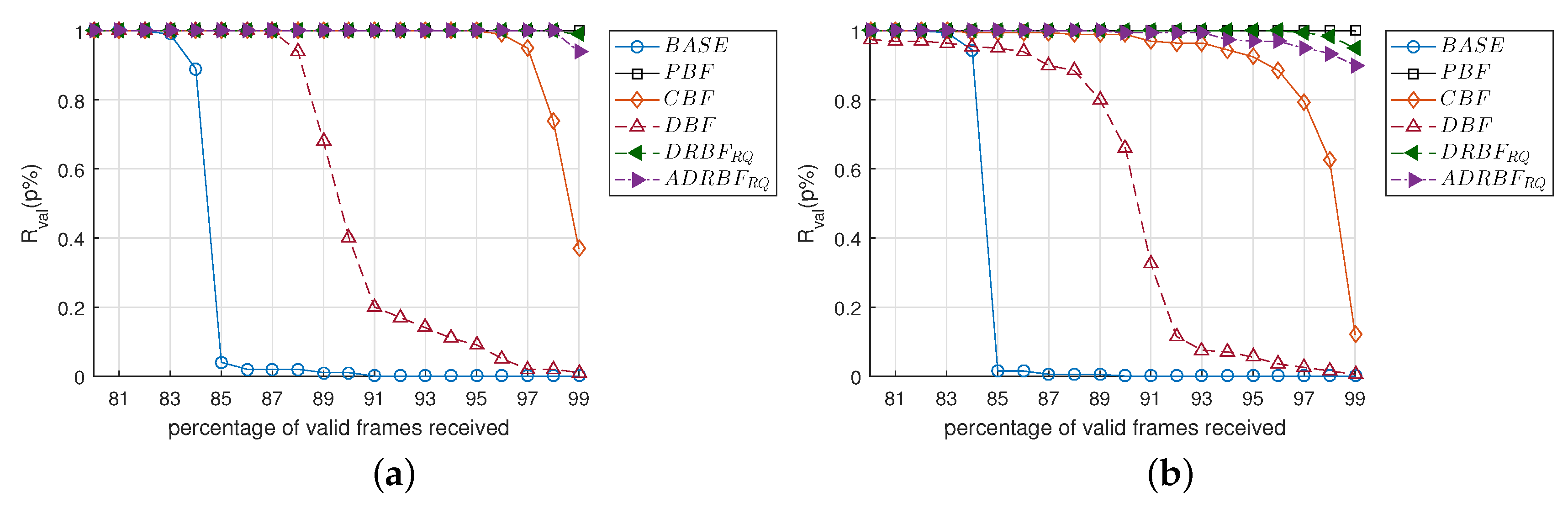
4.8. The Performance Evaluation of the Flooding Mechanism Reliability
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Atzori, L.; Iera, A.; Morabito, G. The Internet of Things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of Things: A Survey on Enabling Technologies, Protocols, and Applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Perera, C.; Liu, C.H.; Jayawardena, S.; Chen, M. A Survey on Internet of Things From Industrial Market Perspective. IEEE Access 2014, 2, 1660–1679. [Google Scholar] [CrossRef]
- Park, H.; Kim, H.; Joo, H.; Song, J. Recent Advancements in the Internet-of-Things Related Standards: A oneM2M Perspective. ICT Express 2016, 2, 126–129. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Fernández-Caramés, T.; Suárez-Albela, M.; Castedo, L.; González-López, M. A Review on Internet of Things for Defense and Public Safety. Sensors 2016, 16, 1644. [Google Scholar] [CrossRef] [PubMed]
- Gil, D.; Ferrández, A.; Mora-Mora, H.; Peral, J. Internet of Things: A Review of Surveys Based on Context Aware Intelligent Services. Sensors 2016, 16, 1069. [Google Scholar] [CrossRef]
- Pereira, C.; Aguiar, A. Towards Efficient Mobile M2M Communications: Survey and Open Challenges. Sensors 2014, 14, 19582–19608. [Google Scholar] [CrossRef] [PubMed]
- Kar, U.N.; Sanyal, D.K. An Overview of Device-to-Device Communication in Cellular Networks. ICT Express 2018, 4, 203–208. [Google Scholar] [CrossRef]
- IEEE 802.11 WG. Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications; IEEE Std. 802.11-2016; IEEE Press: New York, NY, USA, 2016. [Google Scholar]
- Tseng, Y.C.; Ni, S.Y.; Chen, Y.S.; Sheu, J.P. The Broadcast Storm Problem in a Mobile Ad Hoc Network. Wirel. Netw. 2002, 8, 153–167. [Google Scholar] [CrossRef]
- Kim, Y.; Park, E.C. Bimodal Flooding Scheme For Mitigating Contention and Redundancy in Relayed Broadcast. In Proceedings of the 2017 International Conference on Information and Communication Technology Convergence (ICTC 2017), Jeju, Korea, 18–20 October 2017; pp. 715–720. [Google Scholar]
- Williams, B.; Camp, T. Comparison of Broadcasting Techniques for Mobile Ad Hoc Networks. In Proceedings of the 3rd ACM International Symposium on Mobile Ad Hoc Networking & Computing (MobiHoc 2002), Lausanne, Switzerland, 9–11 May 2002; pp. 194–205. [Google Scholar]
- Hanashi, A.M.; Siddique, A.; Awan, I.; Woodward, M. Performance Evaluation of Dynamic Probabilistic Broadcasting for Flooding in Mobile Ad Hoc Networks. Simul. Model. Pract. Theory 2009, 17, 364–375. [Google Scholar] [CrossRef]
- Zhang, X.M.; Wang, E.B.; Xia, J.J.; Sung, D.K. A Neighbor Coverage-Based Probabilistic Rebroadcast for Reducing Routing Overhead in Mobile Ad Hoc Networks. IEEE Trans. Mob. Comput. 2013, 12, 424–433. [Google Scholar] [CrossRef]
- Ejmaa, A.M.E.; Subramaniam, S.; Zukarnain, Z.A.; Hanapi, Z.M. Neighbor-Based Dynamic Connectivity Factor Routing Protocol for Mobile Ad Hoc Network. IEEE Access 2016, 4, 8053–8064. [Google Scholar] [CrossRef]
- Liu, W.; Nakauchi, K.; Shoji, Y. A Neighbor-Based Probabilistic Broadcast Protocol for Data Dissemination in Mobile IoT Networks. IEEE Access 2018. [Google Scholar] [CrossRef]
- Tseng, Y.C.; Ni, S.Y.; Shih, E.Y. Adaptive Approaches to Relieving Broadcast Storms in a Wireless Multihop Mobile Ad Hoc Network. IEEE Trans. Comput. 2003, 52, 545–557. [Google Scholar] [CrossRef]
- Yassein, M.B.; Nimer, S.F.; Al-Dubai, A.Y. A New Dynamic Counter-Based Broadcasting Scheme for Mobile Ad Hoc Networks. Simul. Model. Pract. Theory 2011, 19, 553–563. [Google Scholar] [CrossRef]
- Kim, J.S.; Zhang, Q.; Agrawal, D.P. Probabilistic Broadcasting Based on Coverage Area and Neighbor Confirmation in Mobile Ad Hoc Networks. In Proceedings of the IEEE Global Telecommunications Conference Workshops 2004 (GLOBECOM 2004), Dallas, TX, USA, 29 November–3 December 2004; pp. 96–101. [Google Scholar]
- Wisitpongphan, N.; Tonguz, O.K.; Parikh, J.S.; Mudalige, P.; Bai, F.; Sadekar, V. Broadcast Storm Mitigation Techniques in Vehicular Ad Hoc Networks. IEEE Wirel. Commun. 2007, 14, 84–94. [Google Scholar] [CrossRef]
- Slavik, M.; Mahgoub, I. Statistical Broadcast Protocol Design for Unreliable Channels in Wireless Ad-Hoc Networks. In Proceedings of the 2010 IEEE Global Telecommunications Conference (GLOBECOM 2010), Miami, FL, USA, 6–10 December 2010; pp. 1–5. [Google Scholar]
- Zhang, Q.; Agrawal, D.P. Dynamic Probabilistic Broadcasting in MANETs. J. Parallel Distrib. Comput. 2005, 65, 220–233. [Google Scholar] [CrossRef]
- Mohammed, A.; Ould-Khaoua, M.; Mackenzie, L.M.; Perkins, C.; Abdulai, J.D. Probabilistic Counter-Based Route Discovery for Mobile Ad Hoc Networks. In Proceedings of the 2009 International Conference on Wireless Communications and Mobile Computing: Connecting the World Wirelessly (IWCMC 2009), Leipzig, Germany, 21–24 June 2009; pp. 1335–1339. [Google Scholar]
- Mohammed, A.; Ould-Khaoua, M.; Mackenzie, L.M.; Abdulai, J.D. Dynamic Probabilistic Counter-Based Broadcasting in Mobile Ad Hoc Networks. In Proceedings of the 2009 2nd International Conference on Adaptive Science & Technology (ICAST 2009), Accra, Ghana, 14–16 January 2009; pp. 120–127. [Google Scholar]
- Ling, H.; Mossé, D.; Znati, T. Coverage-Based Probabilistic Forwarding in Ad Hoc Routing. In Proceedings of the 14th International Conference on Computer Communications and Networks (ICCCN 2005), San Diego, CA, USA, 17–19 October 2005; pp. 13–18. [Google Scholar]
- Peng, W.; Lu, X.C. On the Reduction of Broadcast Redundancy in Mobile Ad Hoc Networks. In Proceedings of the 2000 First Annual Workshop on Mobile and Ad Hoc Networking and Computing (MobiHoc 2000), Boston, MA, USA, 11 August 2000; pp. 129–130. [Google Scholar]
- Lim, H.; Kim, C. Flooding in Wireless Ad Hoc Networks. Comput. Commun. 2001, 24, 353–363. [Google Scholar] [CrossRef]
- Nowak, S.; Nowak, M.; Grochla, K.; Pecka, P. Global Queue Pruning Method for Efficient Broadcast in Multihop Wireless Networks. In Proceedings of the 2016 31st International Symposium on Computer and Information Sciences (ISCIS 2016), Kraków, Poland, 27–28 October 2016; Volume 659, pp. 214–224. [Google Scholar]
- Haas, Z.J.; Halpern, J.Y.; Li, L. Gossip-Based Ad Hoc Routing. IEEE/ACM Trans. Netw. 2006, 14, 479–491. [Google Scholar] [CrossRef]
- Zhu, B.; Zeng, X.-P.; Xiong, X.-S.; Qian, C.; Fan, F.-Y.; Geng, W. A Novel Adaptive Load Balancing Routing Algorithm in Ad Hoc Networks. J. Converg. Inf. Technol. 2010, 5, 81–85. [Google Scholar] [CrossRef]
- Stann, F.; Heidemann, J.; Shroff, R.; Murtaza, M.Z. RBP: Reliable Broadcast Propagation in Wireless Networks; USC/Information Sciences Institute, Technical Report ISI-TR-2005-608; USC/Information Sciences Institute: Los Angeles, CA, USA, 2005. [Google Scholar]
- Tang, K.; Gerla, M. Random Access MAC for Efficient Broadcast Support in Ad Hoc Networks. In Proceedings of the 2000 IEEE Wireless Communications and Networking Conference. Conference Record (WCNC 2000), Chicago, IL, USA, 23–28 September 2000; Voume 1, pp. 454–459. [Google Scholar]
- Sun, M.t.; Huang, L.; Wang, S.; Arora, A.; Lai, T.H. Reliable MAC Layer Multicast in IEEE 802.11 Wireless Networks. Wirel. Commun. Mob. Comput. 2003, 3, 439–453. [Google Scholar] [CrossRef]
- Kuri, J.; Kasera, S.K. Reliable Multicast in Multi-Access Wireless LANs. Wirel. Netw. 2001, 7, 359–369. [Google Scholar] [CrossRef]
- Lyakhov, A.; Yakimov, M. Analytical Study of QoS-Oriented Multicast in Wireless Networks. EURASIP J. Wirel. Commun. Netw. 2011, 2011, 307507. [Google Scholar] [CrossRef]
- Smith, B. Instantaneous Companding of Quantized Signals. Bell Labs Tech. J. 1957, 36, 653–709. [Google Scholar] [CrossRef]
- Bianchi, G. Performance Analysis of the IEEE 802.11 Distributed Coordination Function. IEEE J. Sel. Areas Commun. 2000, 18, 535–547. [Google Scholar] [CrossRef]
- Vinko, E.; Laurent, S.; Persefoni, K.; Andreas, M.; Daniel, S.B.; Alexei, Y.G.; Claude, O.; Qinghua, L.; Kai, Y.; Nir, T.; et al. TGn Channel Model (IEEE 802.11-03/940r4). Available online: http://grouper.ieee.org/groups/802/15/archive/802-15-4dlist/doc00000.doc (accessed on 30 April 2019).
- Paul, T.; Ogunfrunmiri, T. Wireless LAN Comes of Age: Understanding the IEEE 802.11n Amendment. IEEE Circuits Syst. Mag. 2008, 8.1, 28–54. [Google Scholar] [CrossRef]
- Peng, F.; Zhang, J.; Ryan, W.E. Adaptive Modulation and Coding for IEEE 802.11n. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference (WCNC 2007), Kowloon, China, 11–15 March 2007; pp. 656–661. [Google Scholar]
- ns-2 Network Simulator. Available online: http://www.isi.edu/nsnam/ns/ (accessed on 30 April 2019).
- ns-3 Network Simulator. Available online: https://www.nsnam.org/ (accessed on 30 April 2019).
- Byers, J.W.; Luby, M.; Mitzenmacher, M. A Digital Fountain Approach to Asynchronous Reliable Multicast. IEEE J. Sel. Areas Commun. 2002, 20, 1528–1540. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| The average number of valid frames per node, i.e., frames received in each node without corruption or duplication. | |
| The average number of frames transmitted per node | |
| The average number of duplicate frames received per node without corruption. | |
| The traffic dissemination time defined as the time from the initial broadcast of the source node until all of the nodes stop relaying. | |
| The total number of frames transmitted per second in the whole network. | |
| The performance value of ADRBF divided by that of DRBF in terms of performance index X | |
| The performance value of divided by that of in terms of performance index X | |
| The fraction of nodes that received valid frames more than p%. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.; Park, E.-C. An Efficient Relayed Broadcasting Based on the Duplication Estimation Model for IoT Applications. Sensors 2019, 19, 2038. https://doi.org/10.3390/s19092038
Kim Y, Park E-C. An Efficient Relayed Broadcasting Based on the Duplication Estimation Model for IoT Applications. Sensors. 2019; 19(9):2038. https://doi.org/10.3390/s19092038
Chicago/Turabian StyleKim, Youngboo, and Eun-Chan Park. 2019. "An Efficient Relayed Broadcasting Based on the Duplication Estimation Model for IoT Applications" Sensors 19, no. 9: 2038. https://doi.org/10.3390/s19092038
APA StyleKim, Y., & Park, E. -C. (2019). An Efficient Relayed Broadcasting Based on the Duplication Estimation Model for IoT Applications. Sensors, 19(9), 2038. https://doi.org/10.3390/s19092038