Robust Sparse Bayesian Learning-Based Off-Grid DOA Estimation Method for Vehicle Localization


Abstract
:1. Introduction
- (1)
- We provide a vehicle localization system consisting of a passive bistatic radar and the vehicle localization method via DOA estimation. The proposed system and method is practically feasible and valuable since it can achieve high efficiency, great robustness, low cost, as well as reduced electromagnetic pollution.
- (2)
- Under the framework of SBL, we propose a novel off-grid DOA estimation approach. We introduce a fast evidence maximization method to update the hyperparameters to the off-grid DOA estimation domain, which can achieve faster convergence than the expectation maximization method used in many other SBL-based off-grid DOA approaches.
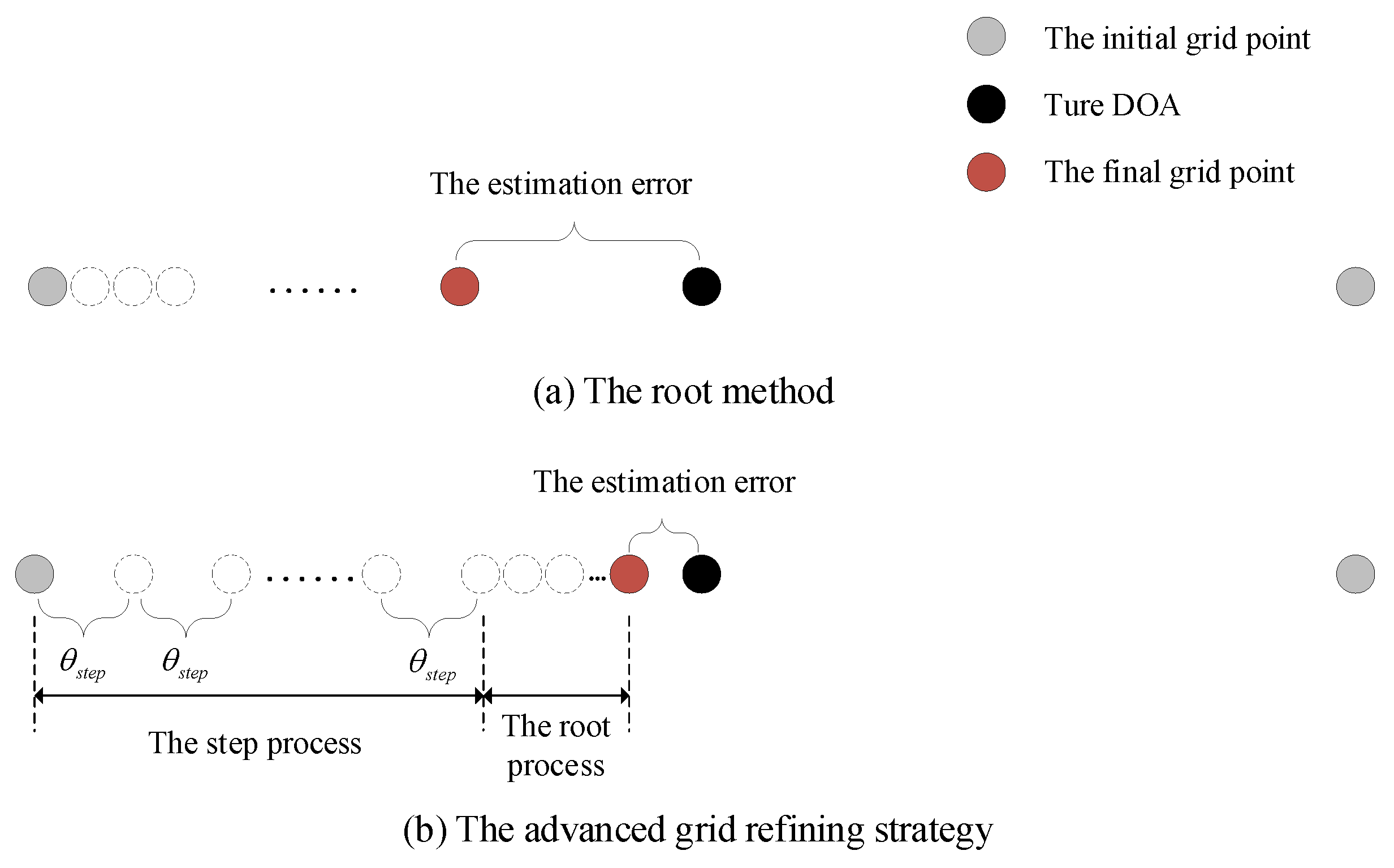
- (3)
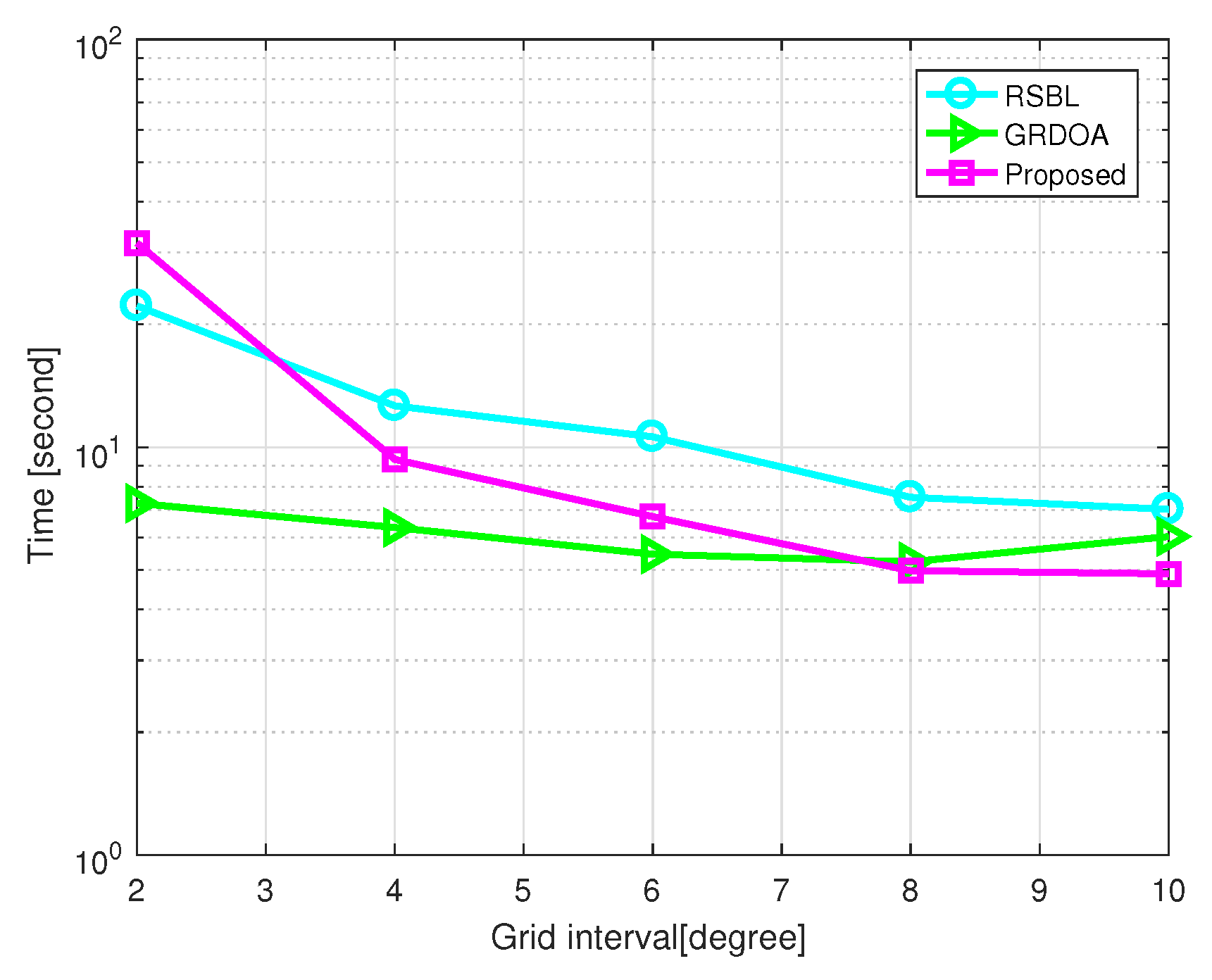
- Based on the conception of grid refining, we propose a new grid refining strategy consisting of a root process and a step process, which effectively reduces the off-grid errors. The grid refining strategy is less sensitive to the location of grid points and DOAs, which makes the proposed method more accurate than other DOA methods. The improvement is strengthened in good conditions with a large number of snapshots and high SNR. Furthermore, the grid refining strategy greatly speeds up the procedure of grid refining, making the proposed method more effective than other DOA methods.
- (4)
- We conduct adequate simulations to verify the superiority and effectiveness of the proposed method. Then, the influence of the parameter , the number of active grid points, and the different conditions on DOA estimation are examined. Then, we compare the proposed DOA method with GRDOA. Finally, a vehicle localization simulation is conducted to verify the feasibility of the proposed vehicle localization method.
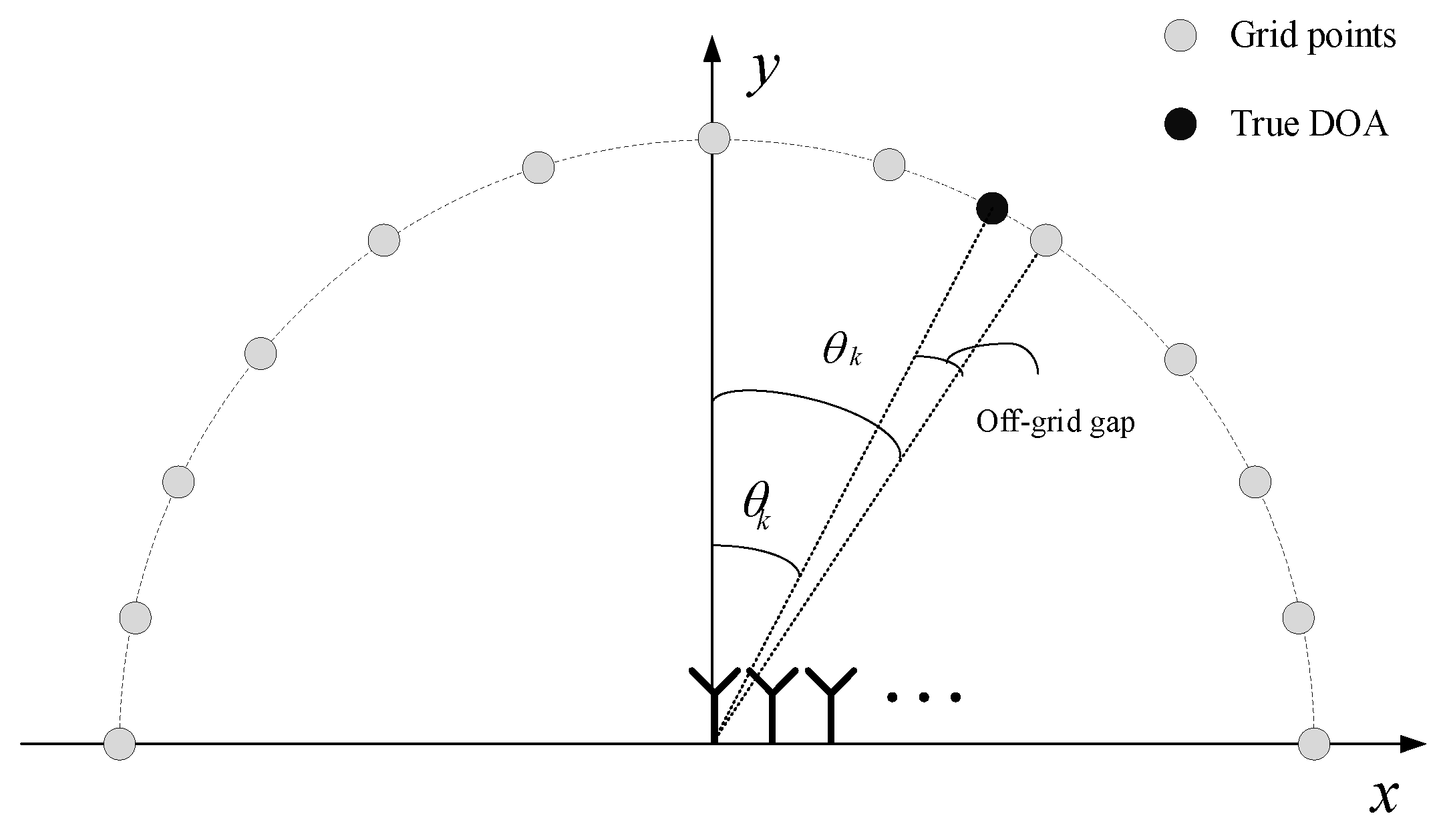
2. Signal Model
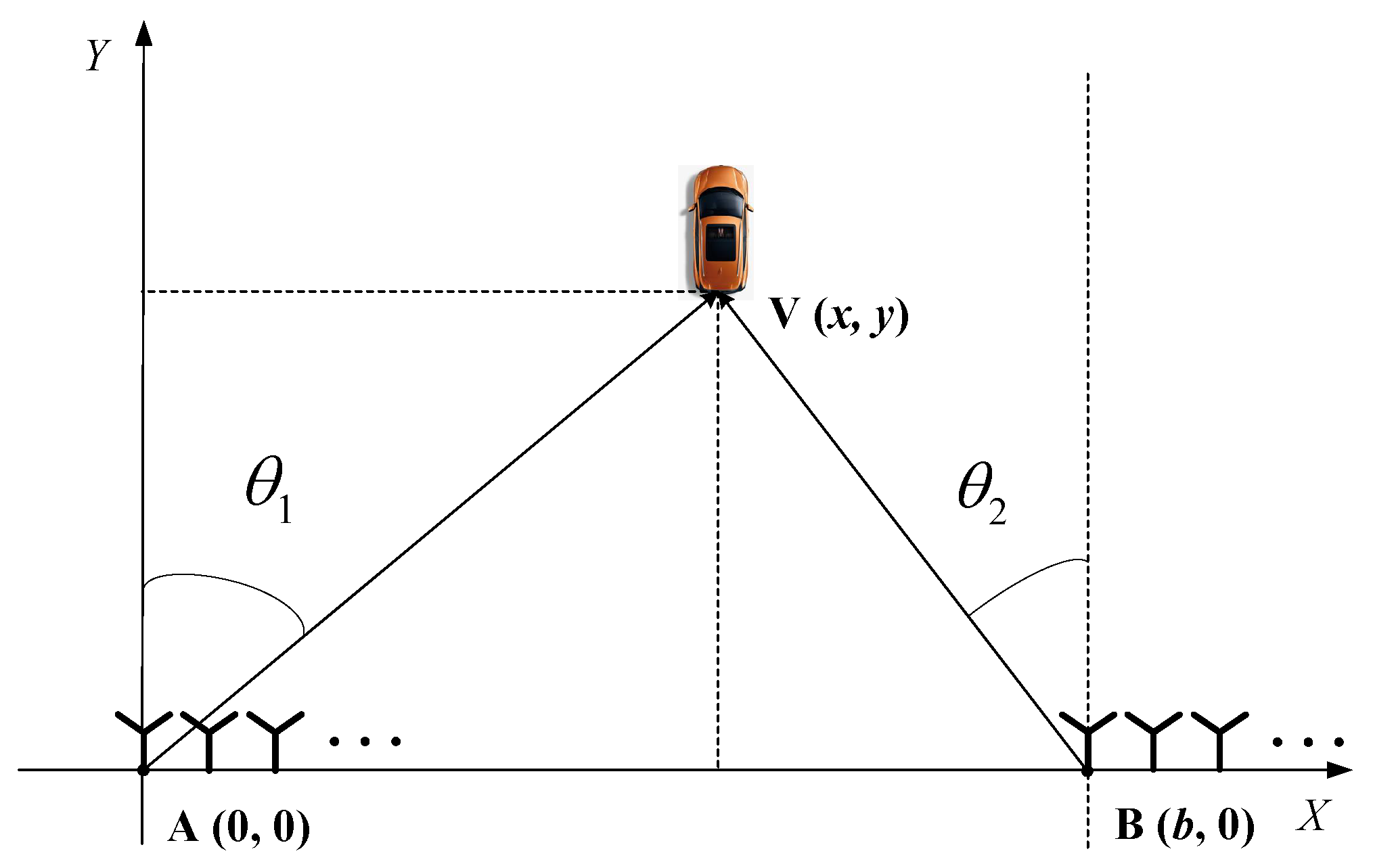
2.1. System Model
2.2. Data Model
3. The Proposed DOA Estimation Algorithm
3.1. Sparse Bayesian Framework
3.2. Hyperparameter Estimation
3.3. Advanced Grid Refining Strategy
3.3.1. The Root Process
3.3.2. The Step Process
3.4. Operating Instruction
4. Simulation
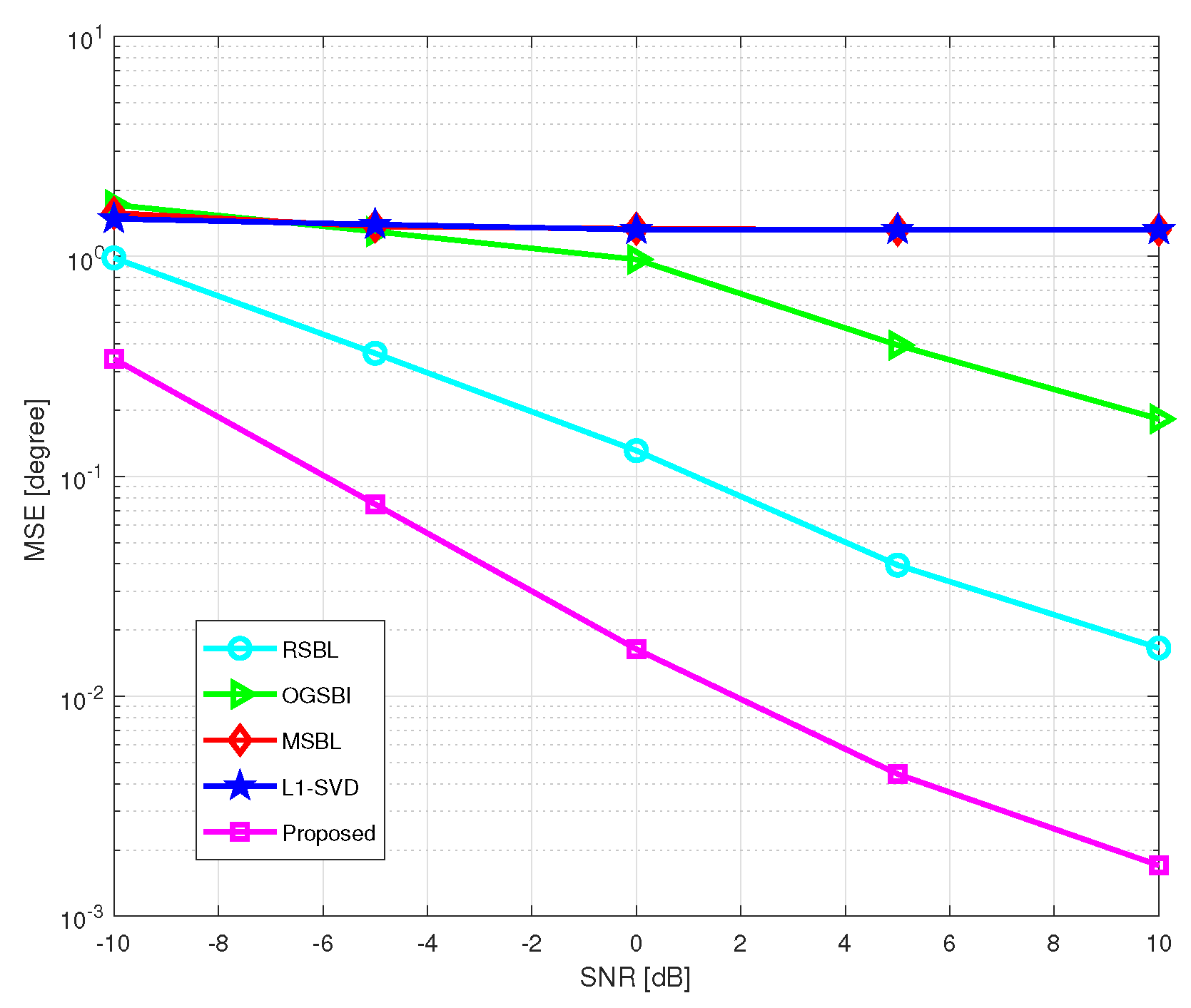
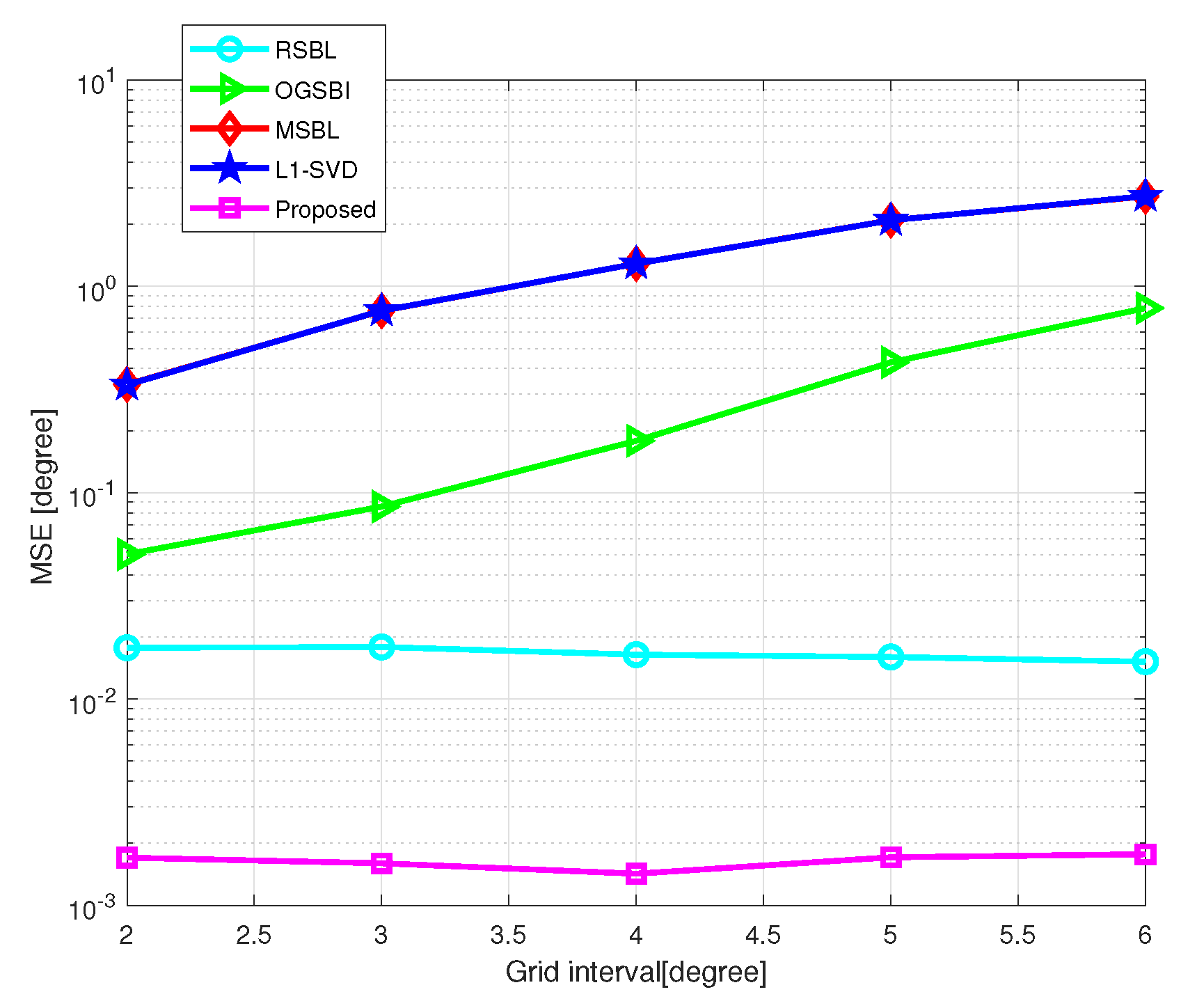
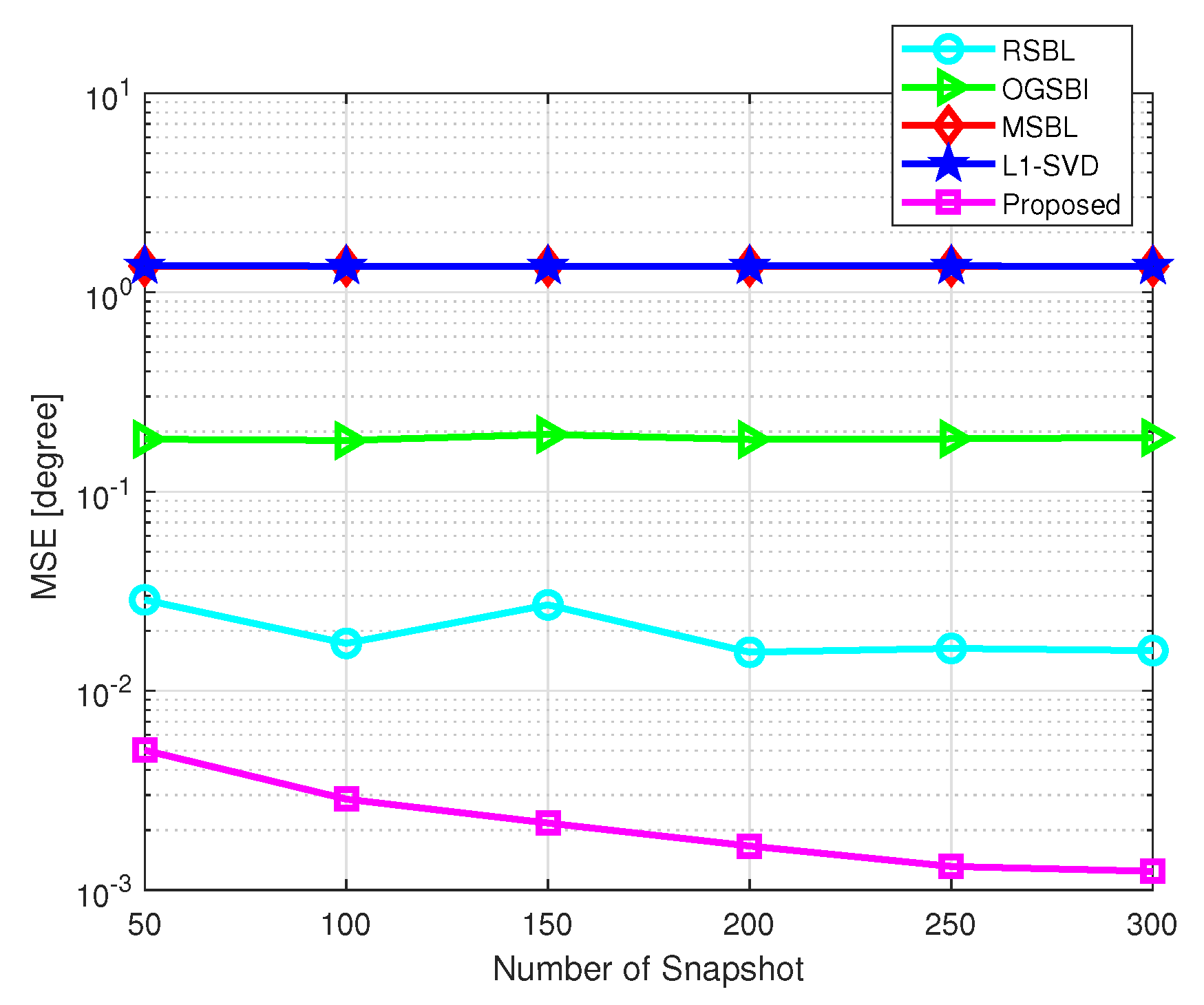
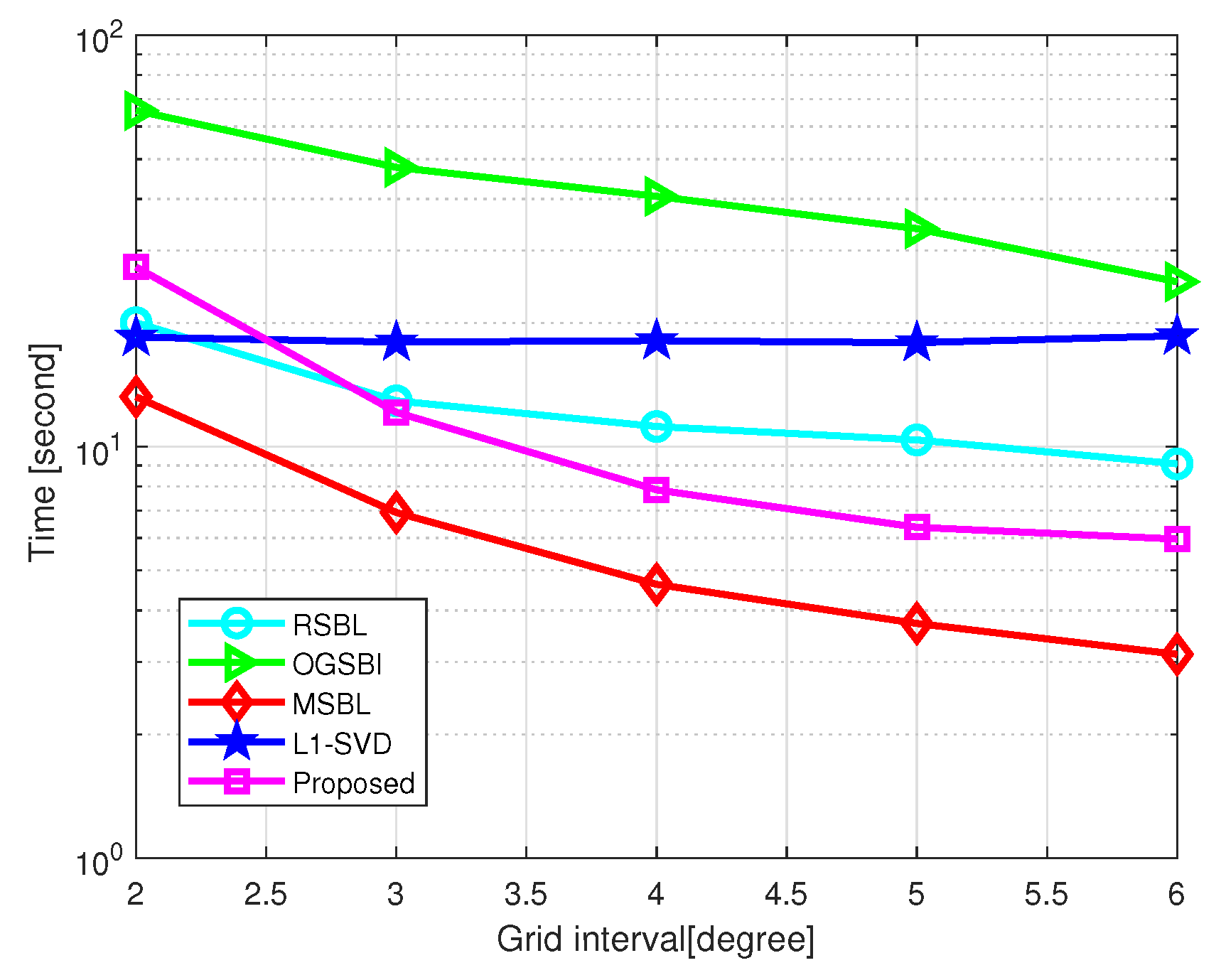
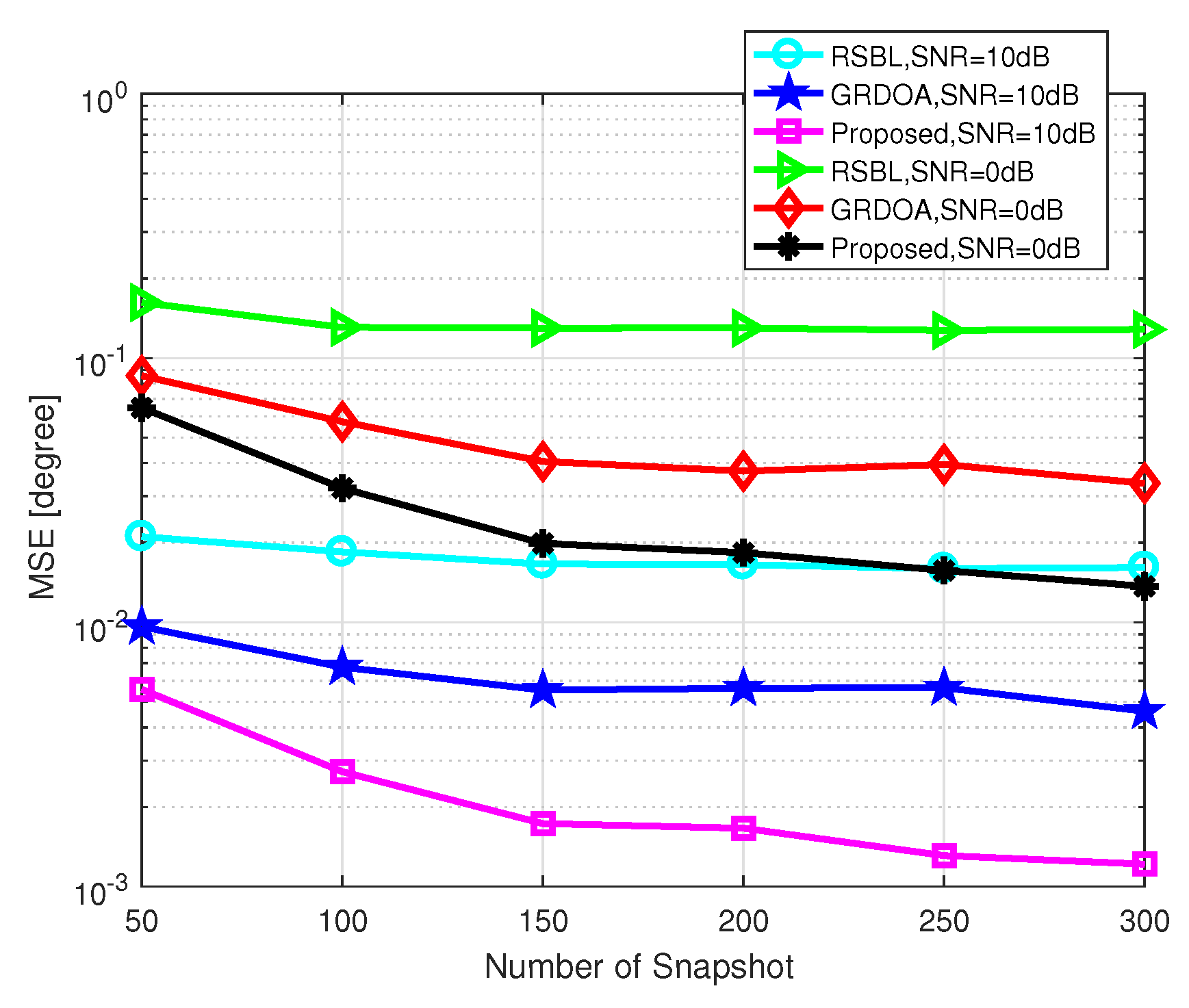
4.1. Performance Analysis
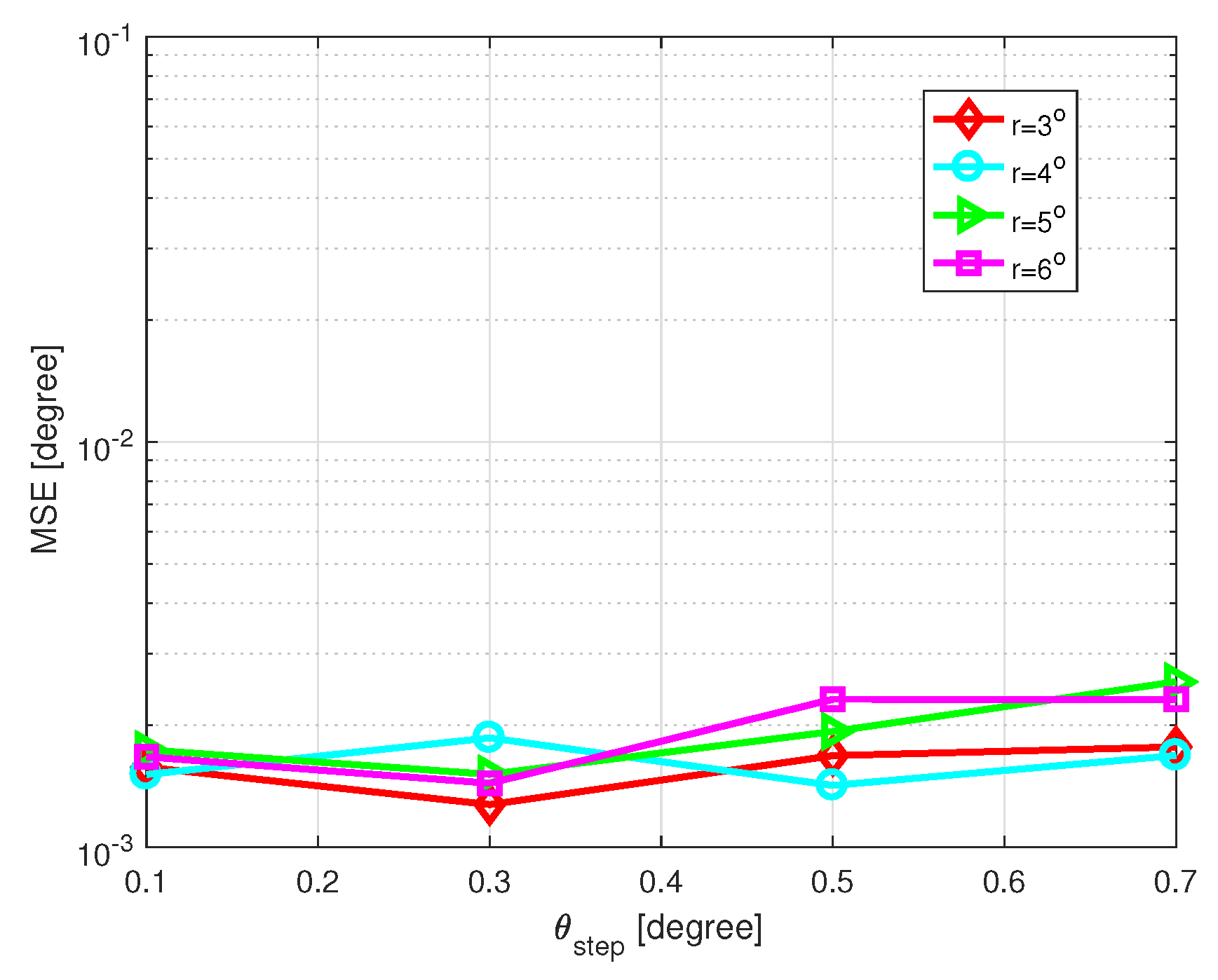
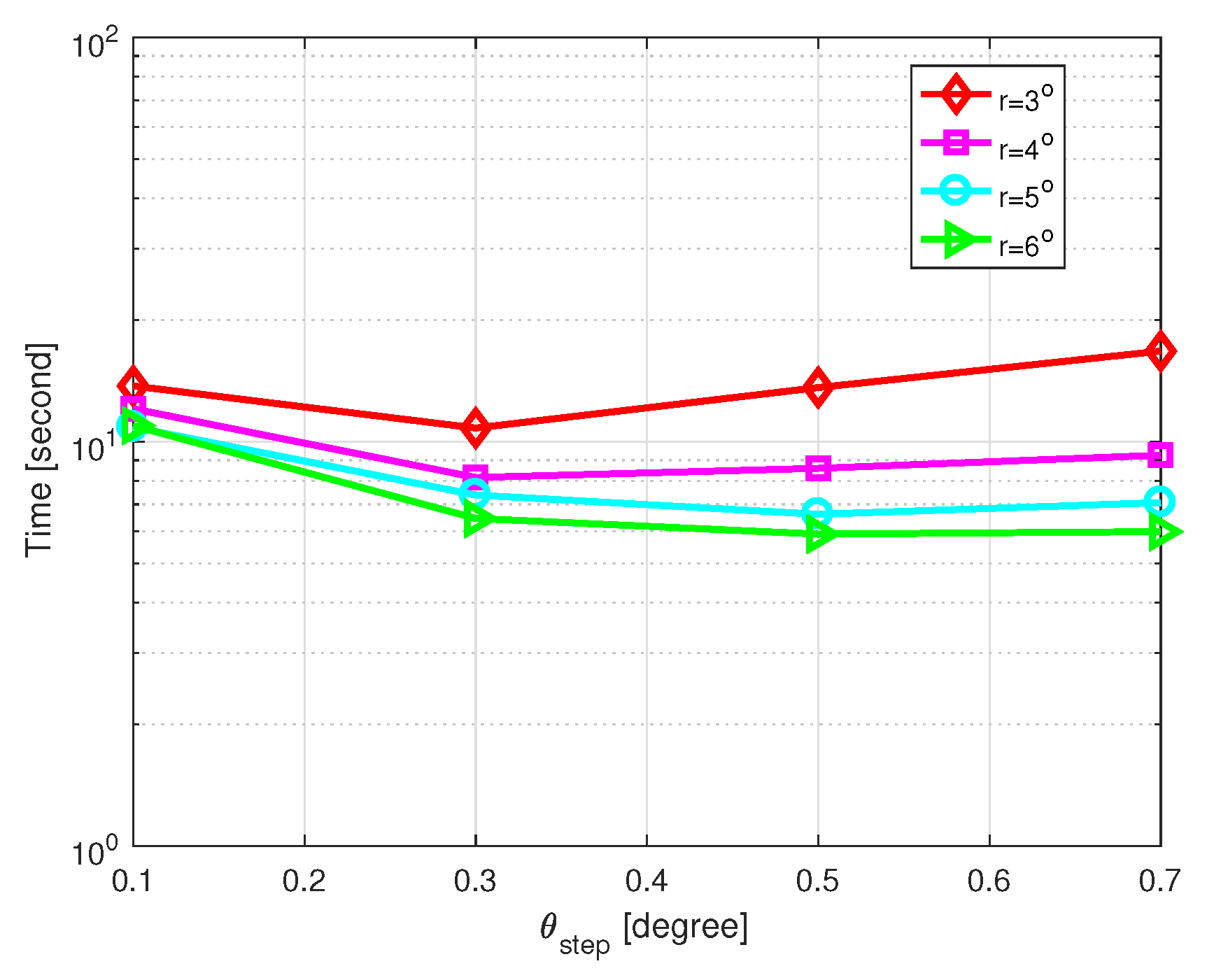
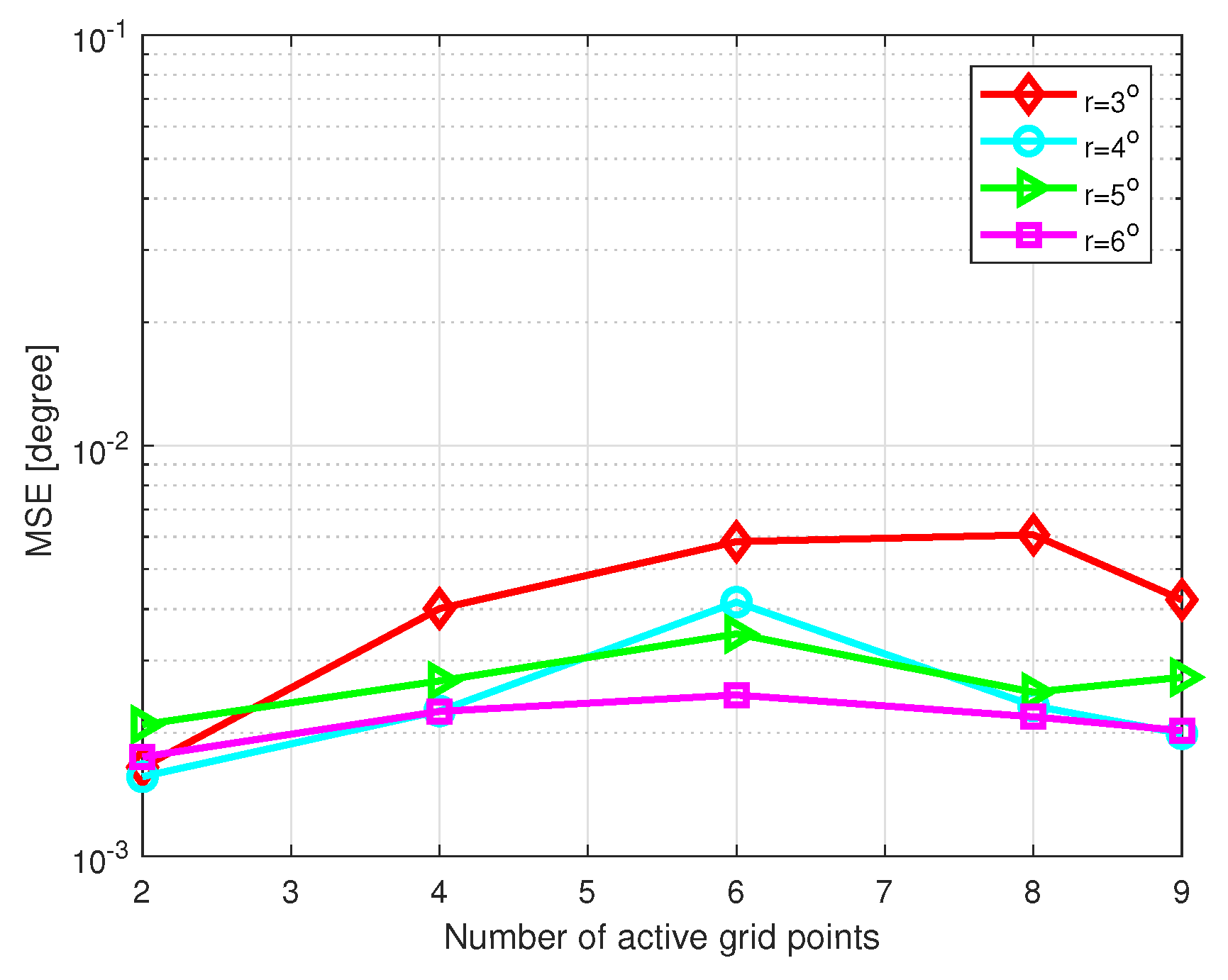
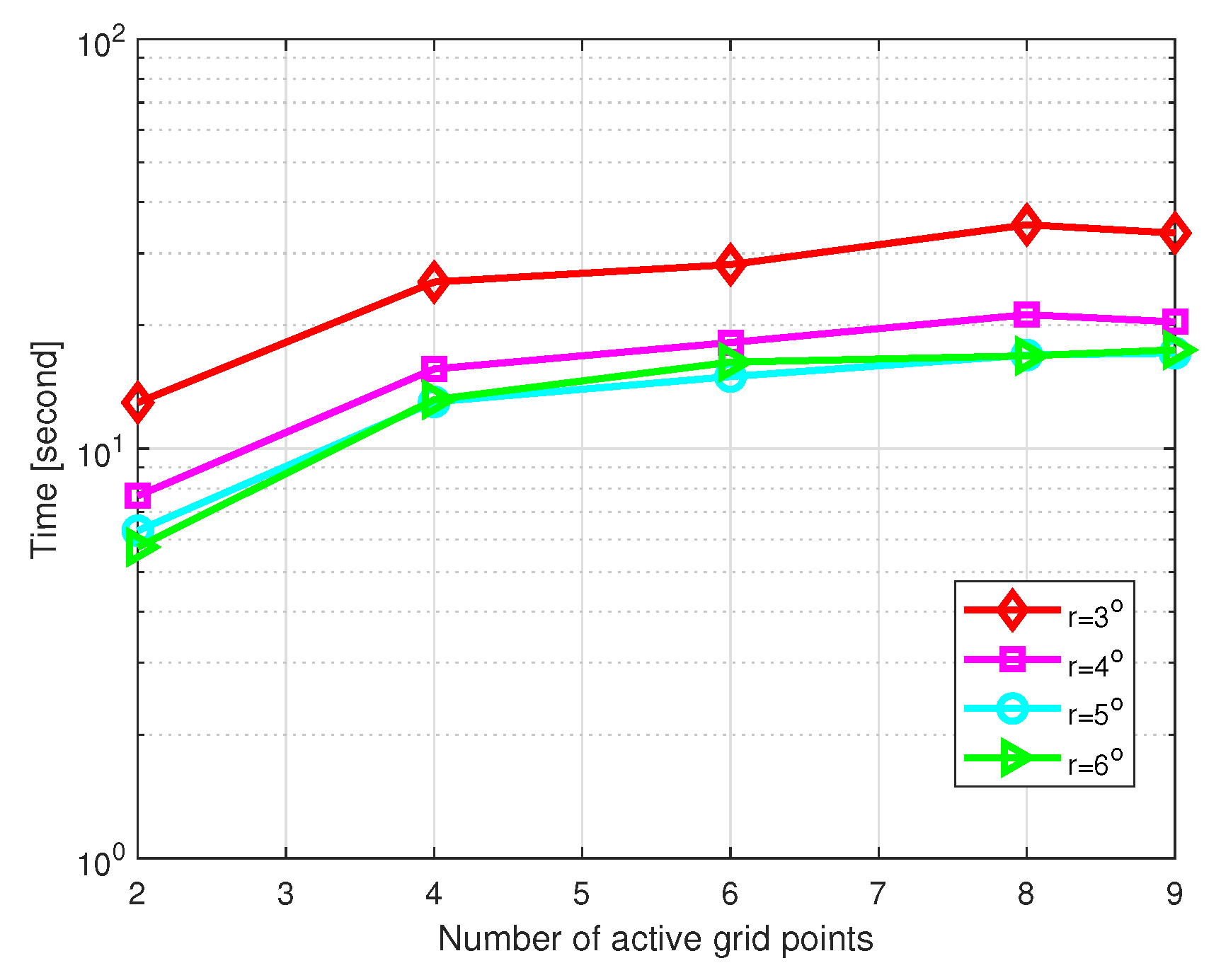
4.2. Influence of Parameter Settings and Conditions
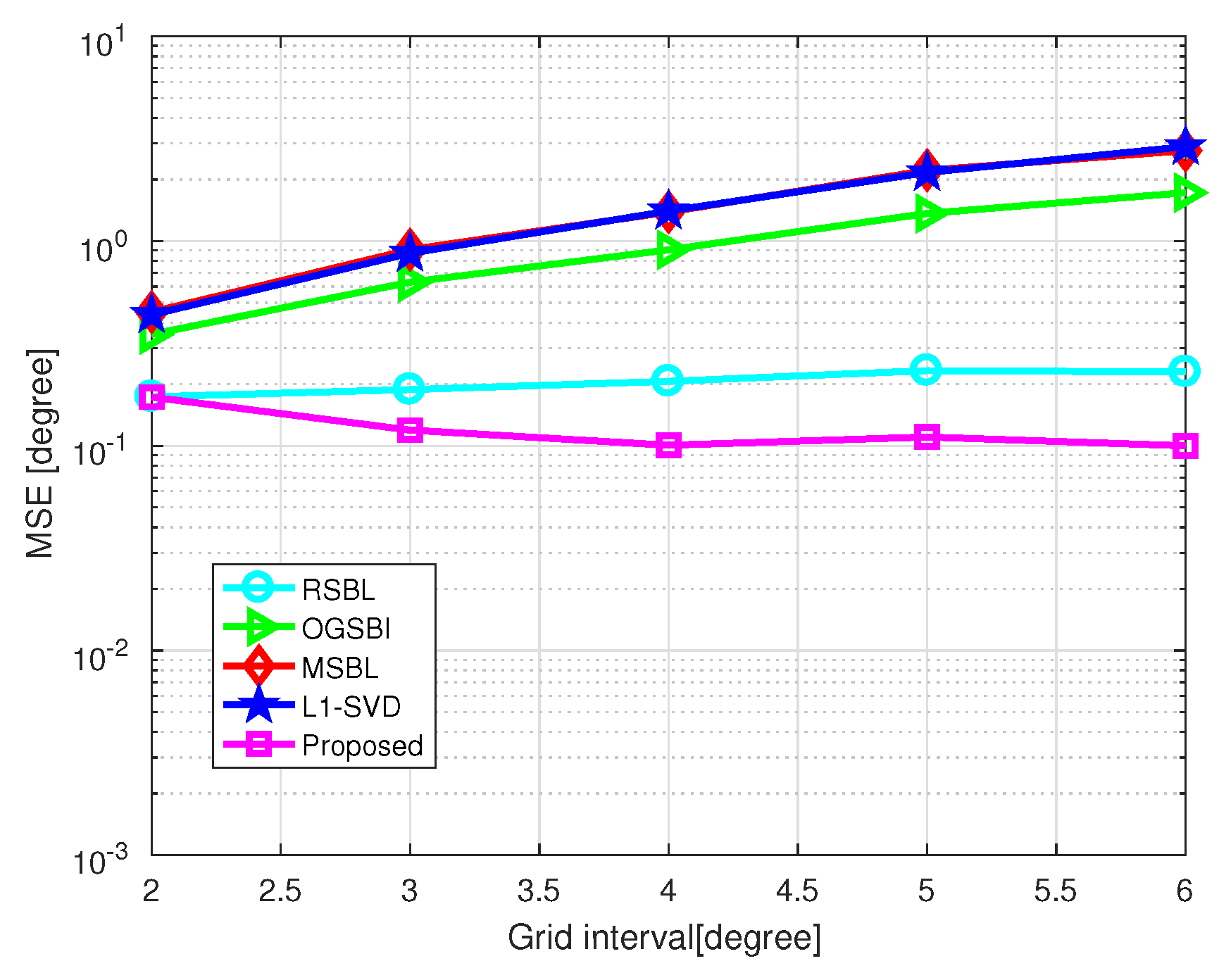
4.3. Compared with GRDOA
- (1)
- Different grid structures: the overall grid structure of GRDOA varies during the algorithm execution. Some new grid points are generated by the fission process, whereas some are discarded according to a certain criterion in the initial estimation of GRDOA. However, the overall grid structure of the proposed method stays unchanged.
- (2)
- Different hyperparameters estimation methods: an expectation maximization method is used in GRDOA to estimate the hyperparameters, whereas a fast evidence maximization method is used in the proposed method.
- (3)
- Different grid refining strategies: the polynomial root strategy [47] is adopted in the grid update process of GRDOA, whereas an advanced grid refining strategy consisting of a root process and a step process is provided in the proposed method.
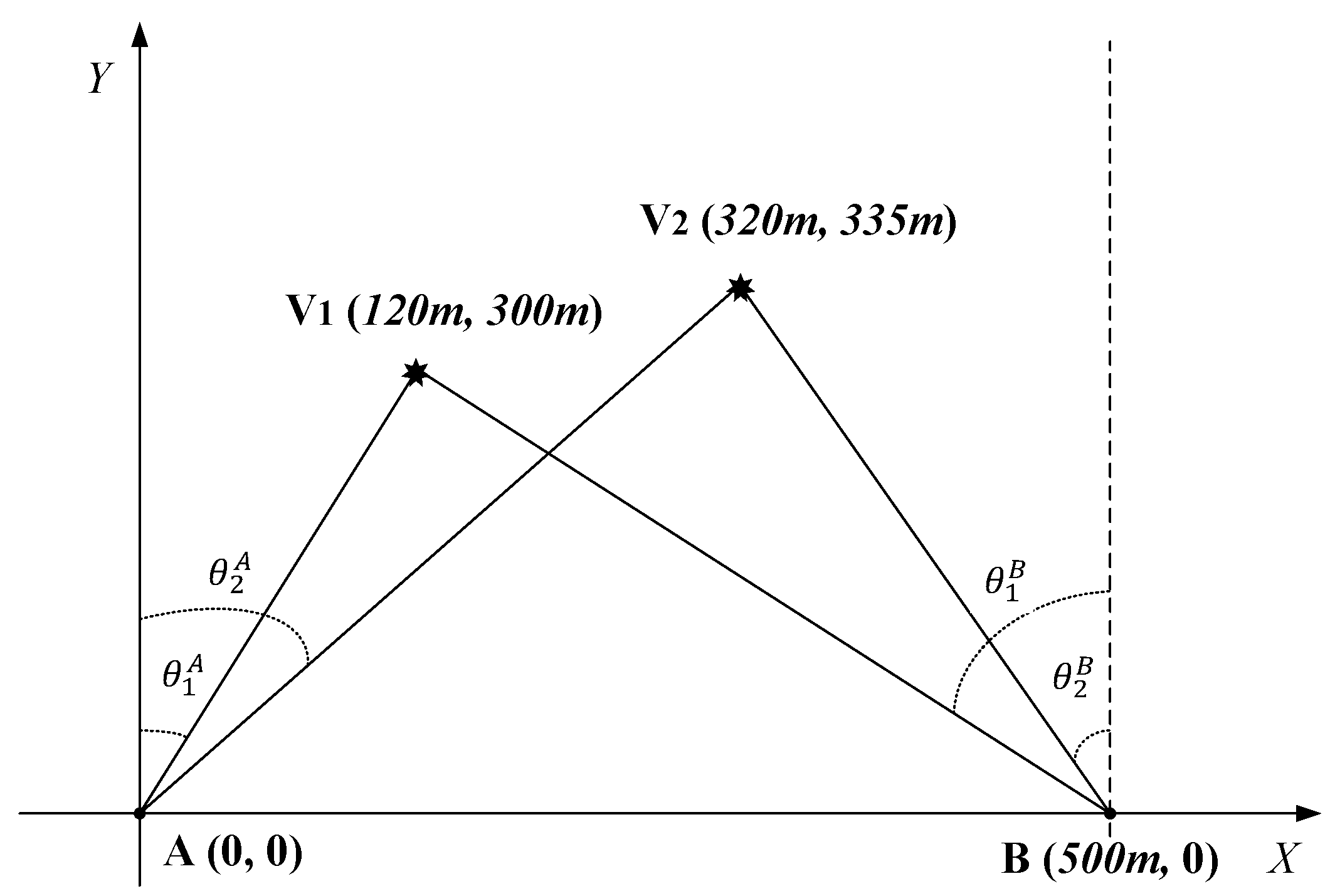
4.4. Vehicle Localization
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lu, R. A new communication-efficient privacy-preserving pange query scheme in fog-enhanced IoT. IEEE Internet Things J. 2018, 6, 2497–2505. [Google Scholar] [CrossRef]
- Lu, R.; Heung, K.; Lashkari, A.; Ghorbani, A. A lightweight privacy-preserving data aggregation scheme for fog computing-enhanced IoT. IEEE Access 2017, 5, 3302–3312. [Google Scholar] [CrossRef]
- Rathee, G.; Sharma, A.; Iqbal, R.; Aloqaily, M.; Jaglan, N.; Kumar, R. A Blockchain Framework for Securing Connected and Autonomous Vehicles. Sensors 2019, 19, 3165. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, C.; Lu, R.; Lin, X.; Shen, X. Secure automated valet parking: A privacy-preserving reservation scheme for autonomous vehicles. IEEE Trans. Veh. Technol. 2018, 67, 11169–11180. [Google Scholar] [CrossRef]
- Kuutti, S.; Fallah, S.; Katsaros, K.; Dianati, M.; Mccullough, F.; Mouzakitis, A. A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications. IEEE Internet Things J. 2018, 5, 829–846. [Google Scholar] [CrossRef]
- Jo, K.; Kim, J.; Kim, D.; Jang, C.; Sunwoo, M. Development of autonomous car—Part I: Distributed system architecture and development process. IEEE Trans. Ind. Electron. 2014, 61, 7131–7140. [Google Scholar] [CrossRef]
- Vivet, D.; Gérossier, F.; Checchin, P.; Trassoudaine, L.; Chapuis, R. Mobile ground-based radar sensor for localization and mapping: Anevaluation of two approaches. Int. J. Adv. Robot. Syst. 2013, 10, 307–318. [Google Scholar] [CrossRef]
- Hsu, C.M.; Shiu, C.W. 3D LiDAR-Based Precision Vehicle Localization with Movable Region Constraints. Sensors 2019, 19, 942. [Google Scholar] [CrossRef] [Green Version]
- Ren, R.; Fu, H.; Wu, M. Large-Scale Outdoor SLAM Based on 2D Lidar. Electronics 2019, 8, 613. [Google Scholar] [CrossRef] [Green Version]
- Cai, H.; Hu, Z.; Huang, G.; Zhu, D.; Su, X. Integration of GPS, Monocular Vision, and High Definition (HD) Map for Accurate Vehicle Localization. Sensors 2018, 18, 3270. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, B.; Matos, A.; Cruz, N. Optimal positioning of autonomous marine vehicles for underwater acoustic source localization using toa measurements. In Proceedings of the 2013 IEEE International Underwater Technology Symposium (UT), Tokyo, Japan, 5–8 March 2013; pp. 1–7. [Google Scholar]
- Wahab, A.A.; Khattab, A.; Fahmy, Y.A. Two-way TOA with limited dead reckoning for GPS-free vehicle localization using single RSU. In Proceedings of the 2013 13th International Conference on ITS Telecommunications (ITST), Tampere, Finland, 5–7 November 2013; pp. 244–249. [Google Scholar]
- Jin, B.; Xu, X.; Zhu, Y.; Zhang, T.; Fei, Q. Single-Source Aided Semi-Autonomous Passive Location for Correcting the Position of an Underwater Vehicle. IEEE Sens. J. 2019, 19, 3267–3275. [Google Scholar] [CrossRef]
- Huang, B.; Xie, L.; Yang, Z. TDOA-based source localization with distance-dependent noises. IEEE Trans. Wirel. Commun. 2015, 14, 468–480. [Google Scholar] [CrossRef]
- Sallouha, H.; Azari, M.M.; Chiumento, A.; Pollin, S. Aerial anchors positioning for reliable rss-based outdoor localization in urban environments. IEEE Wirel. Commun. Lett. 2017, 7, 376–379. [Google Scholar] [CrossRef]
- Sun, W.; Xue, M.; Yu, H.; Tang, H.; Lin, A. Augmentation of Fingerprints for Indoor WiFi Localization Based on Gaussian Process Regression. IEEE Trans. Veh. Technol. 2018, 67, 10896–10905. [Google Scholar] [CrossRef]
- Wang, X.; Huang, M.; Shen, C.; Meng, D. Robust vehicle localization exploiting two based stations cooperation: A MIMO radar perspective. IEEE Access 2018, 6, 48747–48755. [Google Scholar] [CrossRef]
- Wang, H.; Wan, L.; Dong, M.; Ota, K.; Wang, X. Assistant vehicle localization based on three collaborative base stations via SBL-based robust DOA estimation. IEEE Internet Things J. 2019, 6, 5766–5777. [Google Scholar] [CrossRef]
- Zhou, B.; Yao, X.; Yang, L.; Yang, S.; Wu, S.; Kim, Y.; Ai, L. Accurate Rigid Body Localization Using DoA Measurements from a Single Base Station. Electronics 2019, 8, 622. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, AP-34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Shi, Z.; Gu, Y.; Shen, X. DECOM: DOA Estimation with Combined MUSIC for Coprime Array. In Proceedings of the 2013 International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 24–26 October 2013; pp. 1–5. [Google Scholar]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A.; Qu, F. Source estimation using coprime array: A sparse reconstruction perspective. IEEE Sens. J. 2016, 17, 755–765. [Google Scholar] [CrossRef]
- Gu, Y.; Goodman, N.A. Information-theoretic compressive sensing kernel optimization and Bayesian Cramér–Rao bound for time delay estimation. IEEE Trans. Signal Process. 2017, 65, 4525–4537. [Google Scholar]
- Zhou, C.; Zhou, J. Direction-of-arrival estimation with coarray ESPRIT for coprime array. Sensors 2017, 17, 1779. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, C.; Gu, Y.; Zhang, Y.D.; Shi, Z.; Jin, T.; Wu, X. Compressive Sensing based Coprime Array Direction-of-Arrival Estimation. IET Commun. 2017, 11, 1719–1724. [Google Scholar] [CrossRef]
- Gong, P.C.; Wang, W.Q.; Li, F.; Thus, H.C. Sparsity-Aware Transmit Beamspace Design for FDA-MIMO Radar. Signal Process. 2018, 144, 99–103. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; Fan, X.; Shi, Z.; Mao, G.; Zhang, Y.D. Direction-of-arrival estimation for coprime array via virtual array interpolation. IEEE Trans. Signal Process. 2018, 66, 5956–5971. [Google Scholar]
- Zhou, C.; Gu, Y.; He, S.; Shi, Z. A Robust and Efficient Algorithm for Coprime Array Adaptive Beamforming. IEEE Trans. Veh. Technol. 2018, 67, 1099–1112. [Google Scholar] [CrossRef]
- Gu, Y.; Zhang, Y.D. Information-theoretic pilot design for downlink channel estimation in FDD massive MIMO systems. IEEE Trans. Signal Process. 2019, 67, 2334–2346. [Google Scholar]
- Chen, P.; Cao, Z.; Chen, Z.; Wang, X. Off-Grid DOA Estimation Using Sparse Bayesian Learning in MIMO Radar With Unknown Mutual Coupling. IEEE Trans. Signal Process. 2019, 67, 208–220. [Google Scholar]
- Wang, X.; Huang, M.; Wu, X.; Bi, G. Direction of arrival estimation for MIMO radar via unitary nuclear norm minimization. Sensors 2017, 17, 939. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Zhou, M.; Li, J. A PARALIND decomposition-based coherent two-dimensional direction of arrival estimation algorithm for acoustic vector-sensor arrays. Sensors 2013, 13, 5302–5316. [Google Scholar] [CrossRef] [Green Version]
- Malioutov, D.; Cetin, M.; Willsky, A. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef] [Green Version]
- Stoica, P.; Babu, P.; Li, J. SPICE: A sparse covariance-based estimation method for array processing. IEEE Trans. Signal Process. 2011, 59, 629–638. [Google Scholar] [CrossRef]
- Wipf, D.P.; Rao, B.D. An empirical Bayesian strategy for solving the simultaneous sparse approximation problem. IEEE Trans. Signal Process. 2007, 55, 3704–3716. [Google Scholar] [CrossRef]
- Gerstoft, P.; Mecklenbräuker, C.F.; Xenaki, A.; Nannuru, S. Multisnapshot sparse Bayesian learning for DOA. IEEE Signal Process. Lett. 2016, 23, 1469–1473. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Tang, J.; Eldar, Y.C.; Xie, L. On the sample complexity of multichannel frequency estimation via convex optimization. IEEE Trans. Inf. Theory 2018, 65, 2302–2315. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, W.P.; Yan, J. A fast gridless covariance matrix reconstruction method for one-and two-dimensional direction-of-arrival estimation. IEEE Sens. J. 2017, 17, 4916–4927. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, W.P.; Yan, J. A Toeplitz covariance matrix reconstruction approach for direction-of-arrival estimation. IEEE Trans. Veh. Technol. 2017, 66, 8223–8237. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, W.P.; Yan, J.; Zhang, Z. A Spatial Filtering Based Gridless DOA Estimation Method for Coherent Sources. IEEE Access 2018, 6, 56402–56410. [Google Scholar] [CrossRef]
- Cui, Y.; Wang, J.; Qi, J.; Zhang, Z.; Zhu, J. Underdetermined DOA Estimation of Wideband LFM Signals Based on Gridless Sparse Reconstruction in the FRF Domain. Sensors 2019, 19, 2383. [Google Scholar] [CrossRef] [Green Version]
- Han, M.; Dou, W. Atomic Norm-Based DOA Estimation with Dual-Polarized Radar. Electronics 2019, 8, 1056. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Gu, Y.; Shi, Z.; Zhang, Y.D. Off-Grid Direction-of-Arrival Estimation Using Coprime Array Interpolation. IEEE Signal Process. Lett. 2018, 25, 1710–1714. [Google Scholar] [CrossRef]
- Han, K.; Yang, P.; Nehorai, A. Calibrating nested sensor arrays with model errors. IEEE Trans. Antennas Propag. 2015, 63, 4739–4748. [Google Scholar] [CrossRef]
- Yang, Z.; Xie, L.; Zhang, C. Off-grid direction of arrival estimation using sparse Bayesian inference. IEEE Trans. Signal Process. 2013, 61, 38–43. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Zhu, W.P.; Yan, J. Direction of arrival estimation for off-grid signals based on sparse Bayesian learning. IEEE Sens. J. 2016, 16, 2004–2016. [Google Scholar] [CrossRef]
- Dai, J.; Bao, X.; Xu, W.; Chang, C. Root sparse Bayesian learning for off-grid DOA estimation. IEEE Signal Process. Lett. 2017, 24, 46–50. [Google Scholar] [CrossRef] [Green Version]
- Ling, Y.; Gao, H.; Ru, G.; Chen, H.; Li, B.; Cao, T. Grid Reconfiguration Method for Off-Grid DOA Estimation. Electronics 2019, 8, 1209. [Google Scholar] [CrossRef] [Green Version]
- Han, G.; Wan, L.; Shu, L.; Feng, N. Two novel DOA estimation approaches for real-time assistant calibration systems in future vehicle industrial. IEEE Syst. J. 2017, 11, 1361–1372. [Google Scholar] [CrossRef]
- Zhang, X.; Huo, K.; Liu, Y.; Li, X. Direction of Arrival Estimation via Joint Sparse Bayesian Learning for Bi-static Passive Radar. IEEE Access 2019, 7, 72979–72993. [Google Scholar] [CrossRef]
- Colone, F.; Falcone, P.; Bongioanni, C.; Lombardo, P. WiFi-based passive bistatic RADAR: Data processing schemes and experimental results. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1061–1079. [Google Scholar] [CrossRef]
- Raja, R.A.; Noor, A.A.; Nur, A.R.; Asem, A.S.; Fazirulhisyam, H. Analysis on target detection and classification in lte based passive forward scattering radar. Sensors 2016, 16, 1607. [Google Scholar] [CrossRef] [Green Version]
- Falcone, P.; Colone, F.; Macera, A.; Lombardo, P. Two-dimensional location of moving targets within local areas using WiFi-based multistatic passive radar. IET Radar Sonar Navig. 2014, 8, 123–131. [Google Scholar] [CrossRef]
- Chetty, K.; Smith, G.E.; Woodbridge, K. Through-the-wall sensing of personnel using passive bistatic wifi radar at standoff distances. IEEE Trans. Geosci. Remote Sens. 2011, 50, 1218–1226. [Google Scholar] [CrossRef]
- Wang, H.; Wang, X.; Wan, L.; Huang, M. Robust Sparse Bayesian Learning for Off-Grid DOA Estimation With Non-Uniform Noise. IEEE Access 2018, 6, 64688–64697. [Google Scholar] [CrossRef]
- MacKay, D. Bayesian interpolation. Neural Comput. 1992, 4, 415–447. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, Z.; Chen, Z.; Nie, Z. Grid evolution method for DOA estimation. IEEE Trans. Signal Process. 2018, 66, 2374–2383. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Proposed Method. |
|---|
| (1) Input: ; |
| (2) Initialize: , , and ; |
| (3) while not converge do |
| (a) Calculate the posterior moments and using Equations (12) and (13); |
| (b) Update the hyperparameters and using Equations (16) and (17); |
| (c) Implement the advanced grid refining strategy to update : |
| Conduct the root process to calculate the candidate point using Equations (19)–(21); |
| if not reach the maximum iteration time of the step process |
| Conduct the step process using Equation (22) or Equation (23) for grid refining; |
| else |
| Directly use the candidate point for grid refining; |
| end if |
| end while |
| (4) Output: and the final grid; |
| (5) Achieve off-grid DOA estimation through 1D spectrum search on the final grid. |
| Method | Location | Error | Location | Error |
|---|---|---|---|---|
| MSBL | (126.59, 313.33) | 14.87 | (304.65, 338.35) | 15.71 |
| OGSBI | (126.57, 313.02) | 14.58 | (304.57, 338.25) | 15.77 |
| RSBL | (126.38, 309.46) | 11.41 | (306.34, 338.06) | 14.00 |
| Proposed | (121.81, 298.77) | 2.19 | (317.72, 337.13) | 3.12 |
| Method | Location | Error | Location | Error |
|---|---|---|---|---|
| MSBL | (126.59, 313.33) | 14.87 | (304.65, 338.35) | 15.71 |
| OGSBI | (125.77, 311.60) | 12.96 | (306.85, 338.51) | 13.61 |
| RSBL | (122.89, 305.56) | 6.27 | (314.15, 335.66) | 5.89 |
| Proposed | (119.87, 299.16) | 0.85 | (319.13, 333.77) | 1.51 |
| Method | Location | Error | Location | Error |
|---|---|---|---|---|
| MSBL | (126.59, 313.33) | 14.87 | (304.65, 338.35) | 15.71 |
| OGSBI | (122.02, 304.16) | 4.62 | (315.04, 337.36) | 5.49 |
| RSBL | (120.81, 301.29) | 1.52 | (318.44, 336.06) | 1.89 |
| Proposed | (120.03, 299.84) | 0.16 | (320.12, 334.84) | 0.20 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ling, Y.; Gao, H.; Zhou, S.; Yang, L.; Ren, F. Robust Sparse Bayesian Learning-Based Off-Grid DOA Estimation Method for Vehicle Localization. Sensors 2020, 20, 302. https://doi.org/10.3390/s20010302
Ling Y, Gao H, Zhou S, Yang L, Ren F. Robust Sparse Bayesian Learning-Based Off-Grid DOA Estimation Method for Vehicle Localization. Sensors. 2020; 20(1):302. https://doi.org/10.3390/s20010302
Chicago/Turabian StyleLing, Yun, Huotao Gao, Sang Zhou, Lijuan Yang, and Fangyu Ren. 2020. "Robust Sparse Bayesian Learning-Based Off-Grid DOA Estimation Method for Vehicle Localization" Sensors 20, no. 1: 302. https://doi.org/10.3390/s20010302
APA StyleLing, Y., Gao, H., Zhou, S., Yang, L., & Ren, F. (2020). Robust Sparse Bayesian Learning-Based Off-Grid DOA Estimation Method for Vehicle Localization. Sensors, 20(1), 302. https://doi.org/10.3390/s20010302