Reflections and Methodological Proposals to Treat the Concept of “Information Precision” in Smart Agriculture Practices †


Abstract
:1. Introduction
2. Data, Information, and Decision Making Processes
- (1)
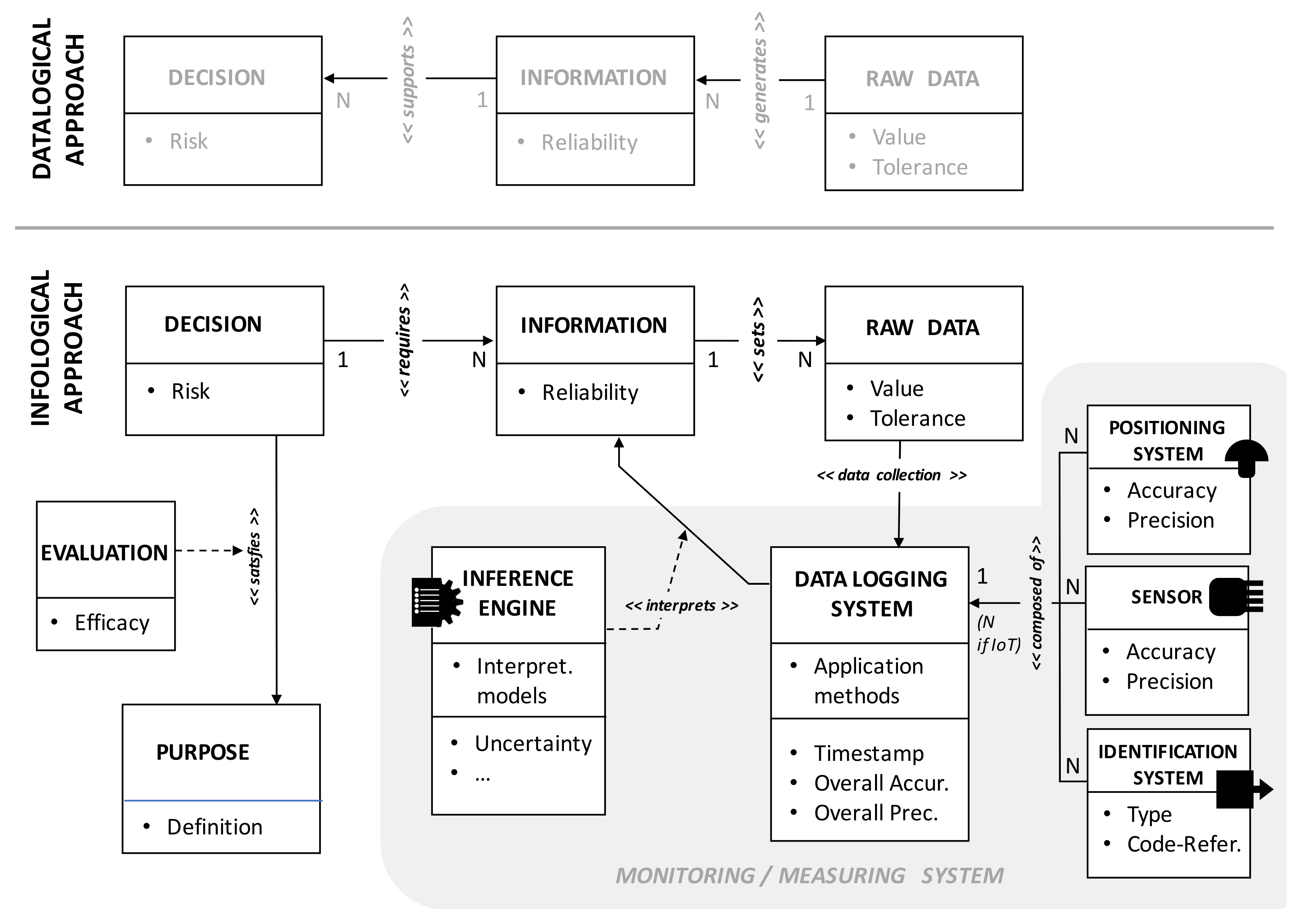
- infological and datalogical approaches share the same main classes of entities (DECISION, INFORMATION, RAW DATA); however, they radically change the relationships between them; in fact, with the datalogical approach, RAW DATA “generate” INFORMATION that then “support” DECISION; in the infological approach, the DECISIONs “require” INFORMATION, which then “set” RAW DATA; it is, therefore, a simple conceptual approach which, although virtual, is able to heavily influence the choice of IIS components and its general architecture, with potentially significant repercussions on the quality of the subsequent management of the enterprise;
- (2)
- in the infological approach, the concept of precision depends on the type of decision to be taken and the levels of risk the decision-maker is willing to assume a priori with respect to the efficacy derived from the effects of the decision itself; thus, the quality of decision-making depends on the degree of satisfaction of the objective that the decision is called to resolve (efficacy); from this standpoint, an evaluation process can be represented by a specific class (EVALUATION) that expresses the relationship << satisfies >> between the DECISION and PURPOSE entities;
- (3)
- raw data acquisition devices may require the use of different types of basic components (POSITIONING SYSTEMS, SENSORS, IDENTIFICATION SYSTEMS) that are often to be included in integrated combinations; each component has its own application methods and helps to condition the information reliability through the quality of the measures it can perform (conditioned by its precision and accuracy attributes, which must satisfy the tolerance requirements of the raw data);
- (4)
- data acquisition also has its own temporal dimension, of fundamental importance to reconstruct, then, the dynamic aspects of production processes; generally, the timestamp is in charge of the DATA LOGGING SYSTEM, which also performs synchronization (and eventually integration) functions with respect to the signal acquisition frequencies of each basic component attached to it;
- (5)
- the reliability of the transformation of raw data into information depends, besides on the instrumental reliability, often also on the need for interpretation of information through appropriate algorithms supported by inference engines; these procedures introduce a further degree of uncertainty that will ultimately affect the quality of the decision to be taken, with effects on the related levels of risk;
- (6)
- the above mentioned basic components usually have a one-to-many (1:N) relationship with the DATA LOGGING SYSTEM (“composed of”); the innovations introduced with the IoT and IoS solutions have allowed to modify it in a many-to-many (N:N), thanks, above all, to the possibility to manage the connections remotely, and to use specific communication protocols, including solutions based on decentralized architectures, such as cloud/fog computing. If on the one hand this allows to have undoubted advantages, thanks to a greater constructive simplicity and management flexibility, on the other hand it involves less customization of the components themselves, and a different attention in the use of INFERENCE ENGINE, which will have to be redefined according to the needs of each specific domain of interest. The world of research will be destined to develop relevant insights in this field, especially in the fields of application of the already mentioned “predictive maintenance”, where developments are expected especially in terms of interpretative skills of IIS (Machine Learning).
3. Type of Decisions and Quality of Monitoring
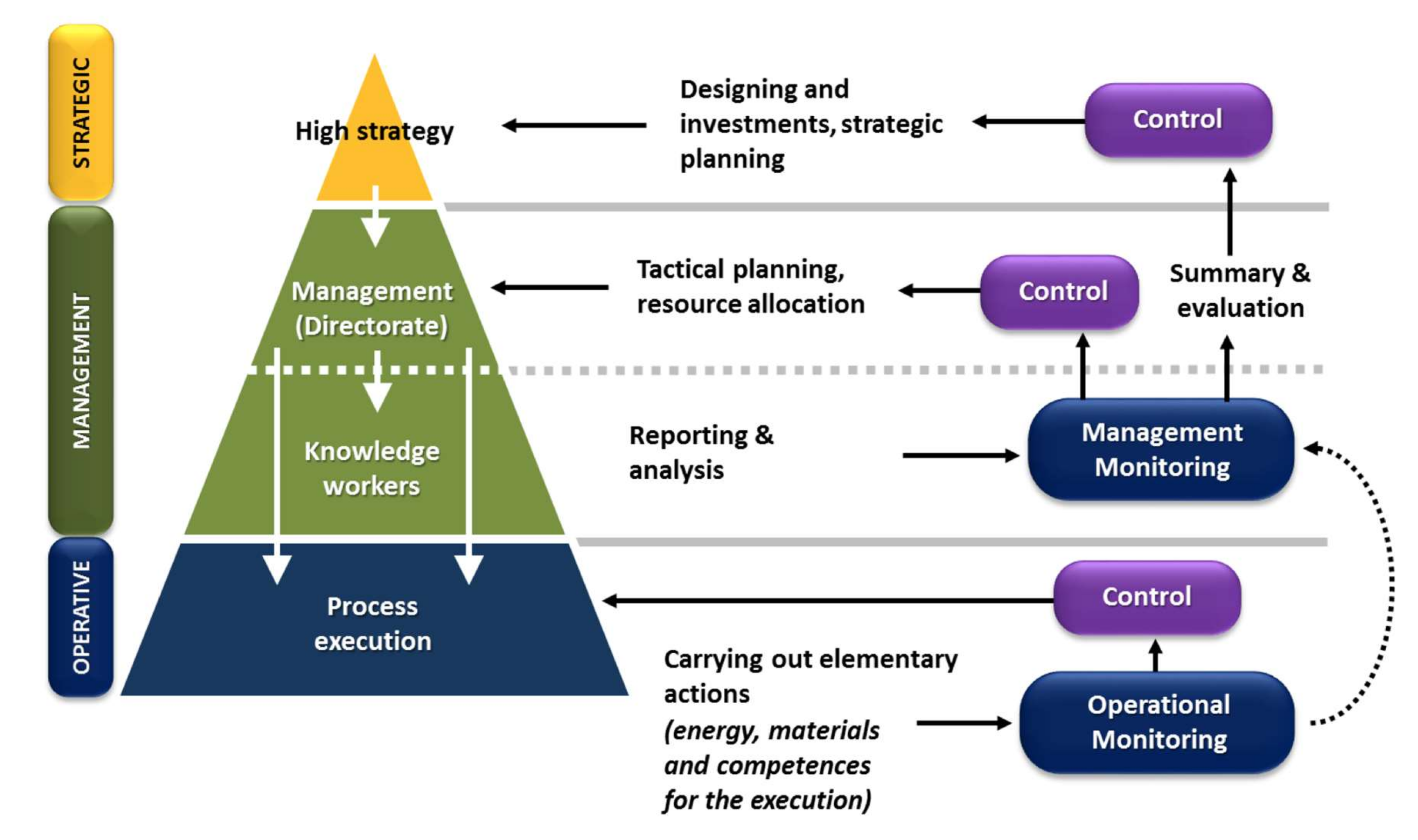
3.1. Hierarchy of Decision-Making Levels
3.2. Quality of the “A Priori Knowledge” and Domains of Interest
- (1)
- the decision-making level and purposes of the decision-maker;
- (2)
- the quality of the “a priori knowledge” that features the control activities required by the decision-making process, a quality that in turn depends on the features of the reference application context (domain of interest).
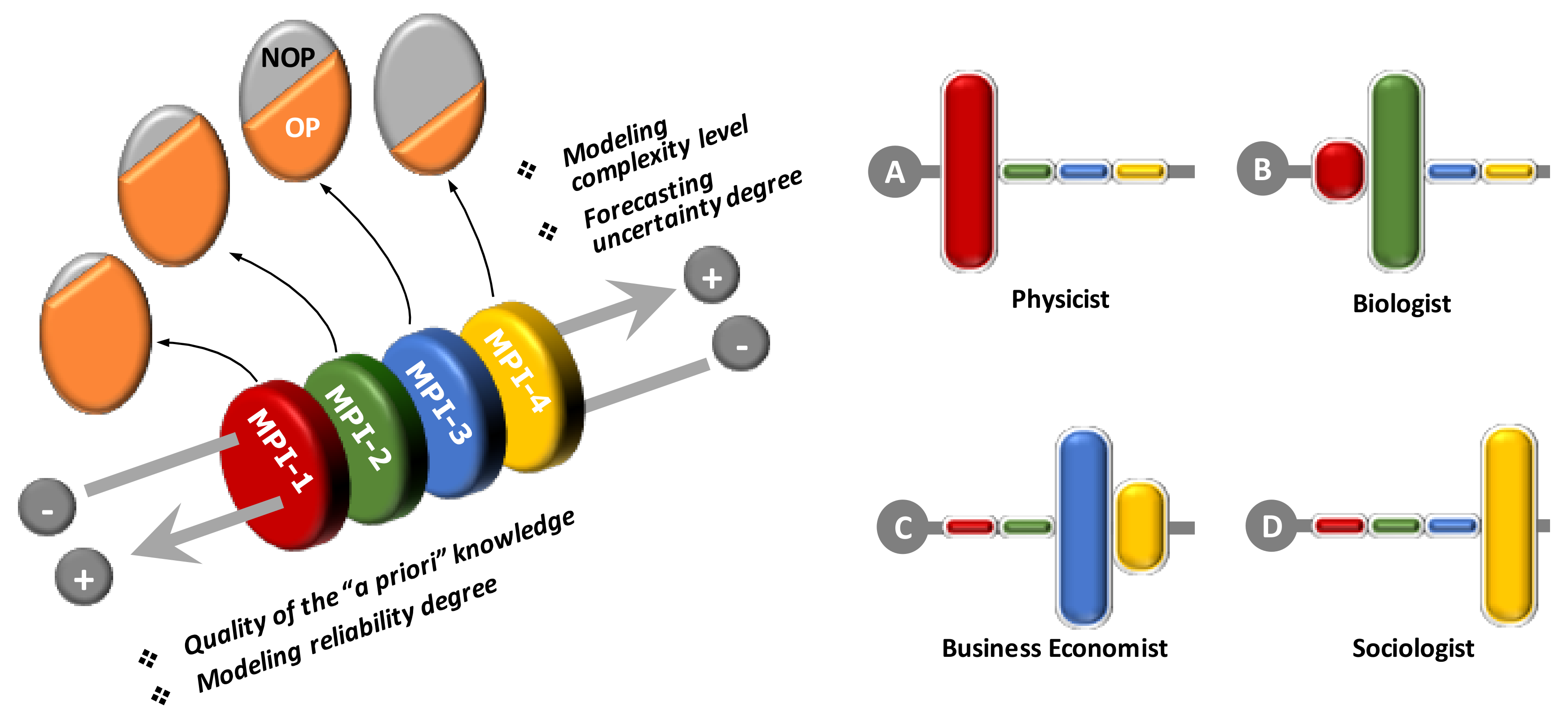
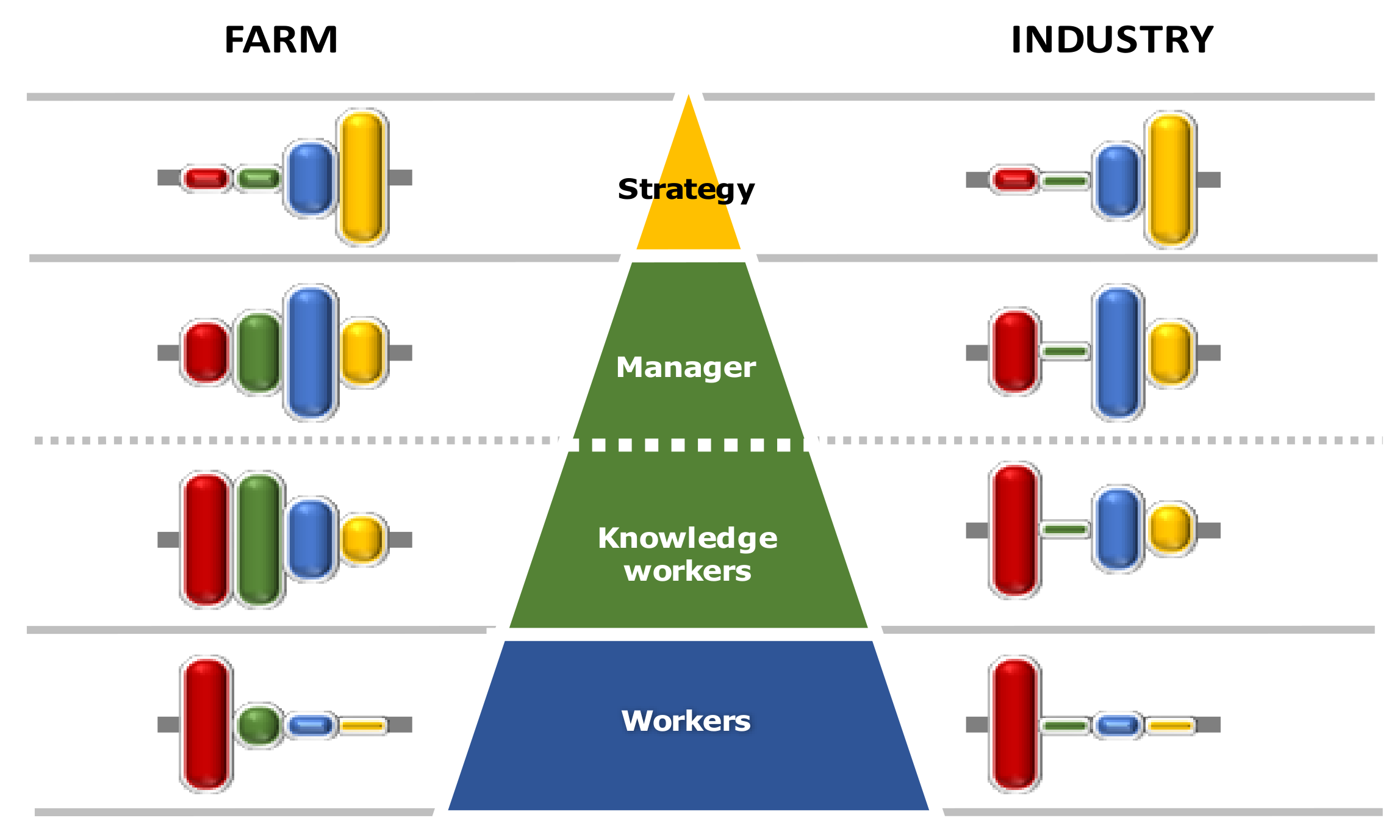
3.3. Macrodomains of Prevailing Interest
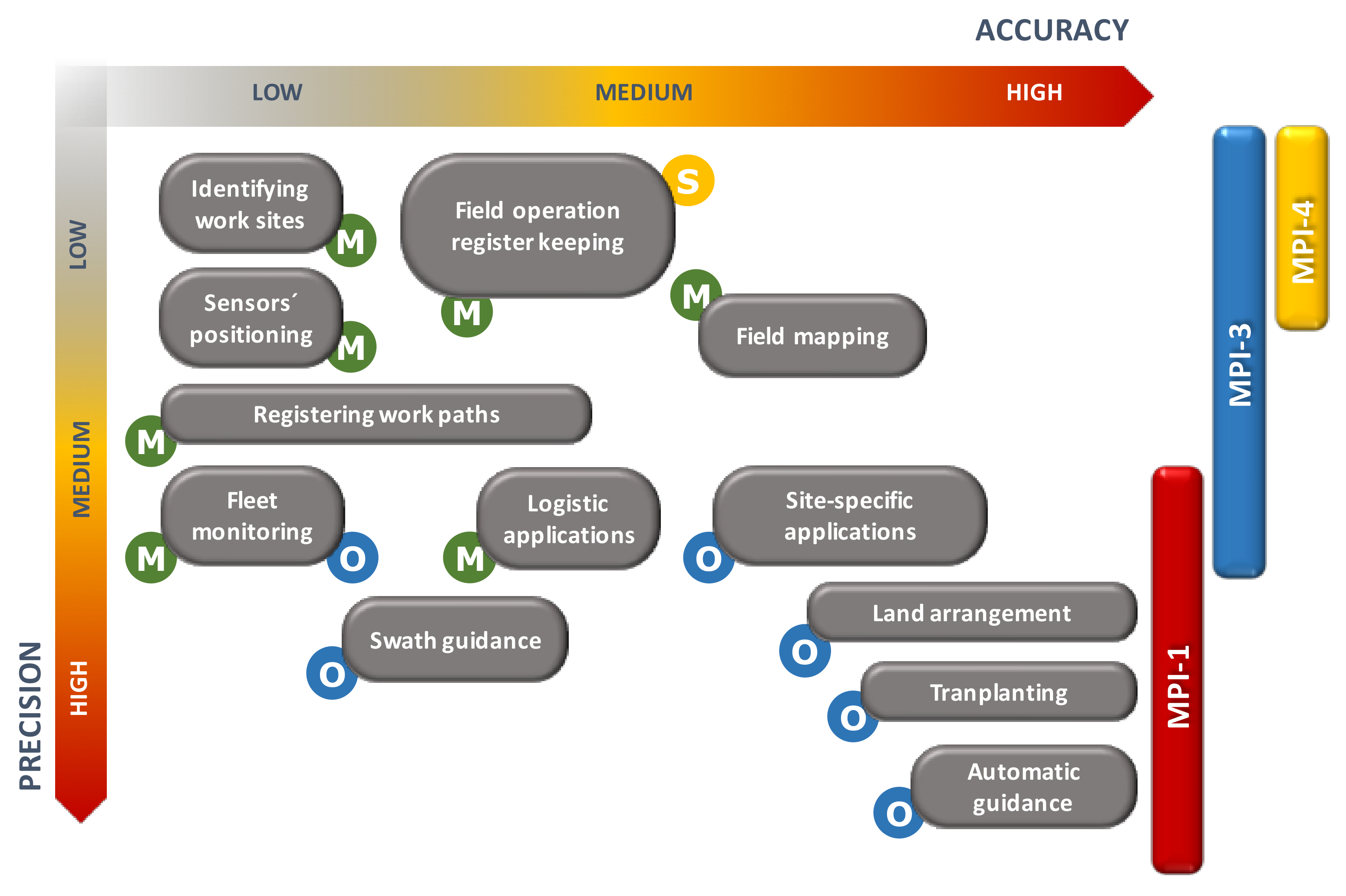
- MPI-1: Physical and Chemical MPIs, in which exact sciences and well defined/proved theories prevail;
- MPI-2: Biological and Ecological MPIs, partly yet conditioned by empirical sciences, with some theories that must be further improved, typically conditioned by the still fuzzy knowledge of some aspects of life sciences;
- MPI-3: Productive and Hierarchical MPIs, largely conditioned by empirical sciences, since also dependent on the cognitive behavior of single individuals; they require direct observations and analysis of trends;
- MPI-4: Economic and Social MPIs, concern complex systems in which the behavior of large masses of individuals prevails (contexts of not-exact sciences); the main investigative tools relate to economic and social observatories, market surveys and statistical sciences.
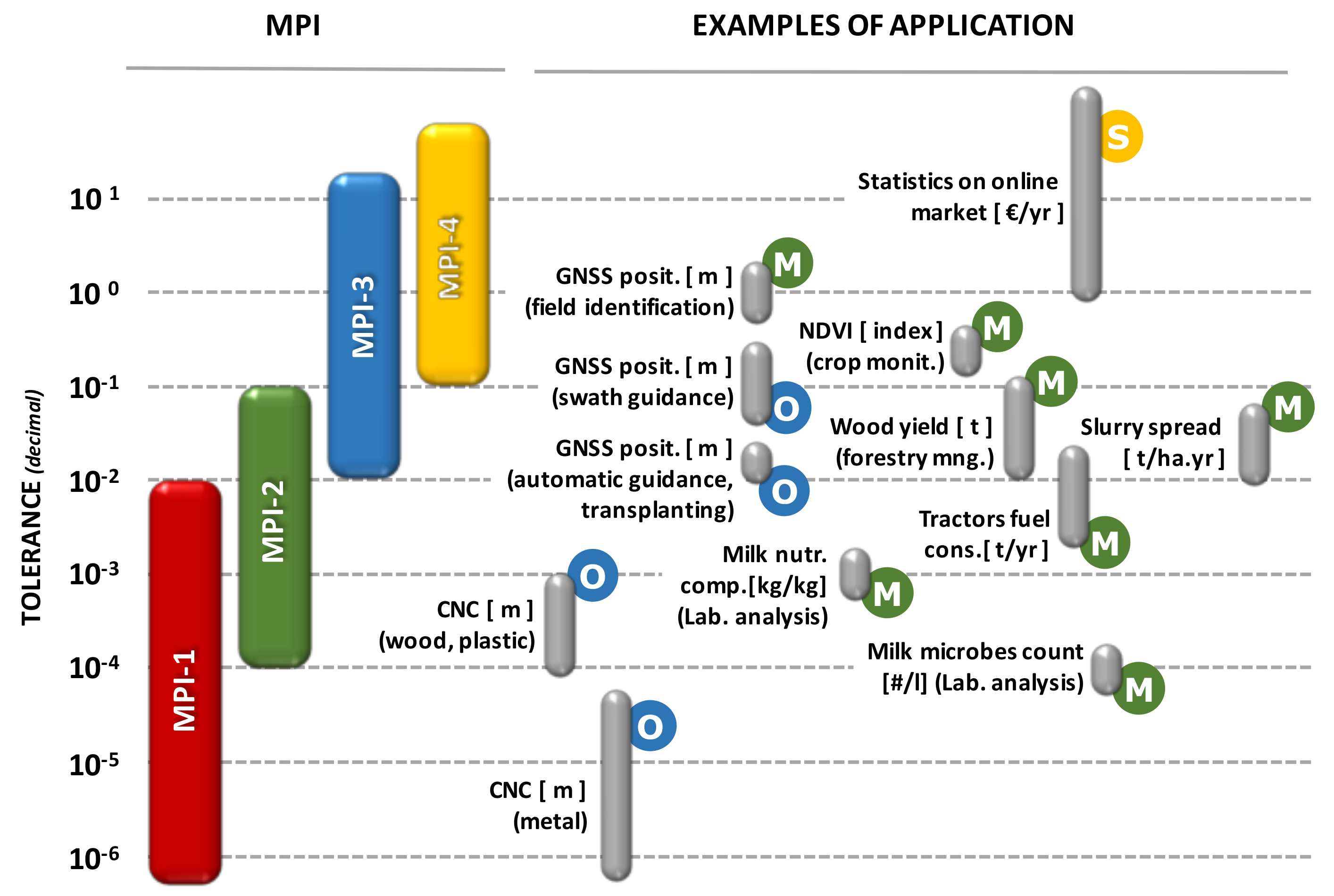
- Computer Numerical Control (CNC) machines, typical of many industrial processes, are among the means of production that allow the lowest tolerances (up to 10−6 m), however, with a very wide range of variability depending on the process and the type of material being processed. Here we operate in the full domain of MPI-1;
- there are needs for information that-regardless of the decision-making level that requires them (operational or managerial)-admit very narrow tolerance ranges; in the examples considered here, they concern both the automatic guidance rather than the fully automated field transplantation operations (MPI-1), and the feedback from laboratory tests aimed at a product control (MPI-1 or MPI-2);
- measurements for information related to Management Support Systems (MSS) applications generally allow higher tolerances, especially when the final information results from the aggregation of several measurements (e.g., yearly fuel consumption) or the integration of several measurement systems used in continuous monitoring activities (e.g., slurry spreading); in the SA applications—as well as in many predictive maintenance tasks—the information provided by an IIS often derive from a very articulated combination of monitoring and measurement systems between elements referable to different MPIs, whose aggregation generally involves significant phenomena of error propagation with a consequent increase in the degree of uncertainty;
- the information for Strategic Decision Support Systems (SDSS) are those characterized by the highest tolerances. Unlike the other cases, in fact, here the information often also comes from observations carried out outside the production system (e.g., average costs/prices of production factors, market analysis, statistics on consumer trends, etc.). In this way, the acquisition procedures outlined in Figure 2 are avoided, given that data logging systems are usually replaced by database access tools, by the use of simulation models for the analysis of hypothetical alternative scenarios, or by the carrying out of surveys through sample interviews; in this case we work on elements typically related to MPI-4.
4. Analysis of Some Practical Examples
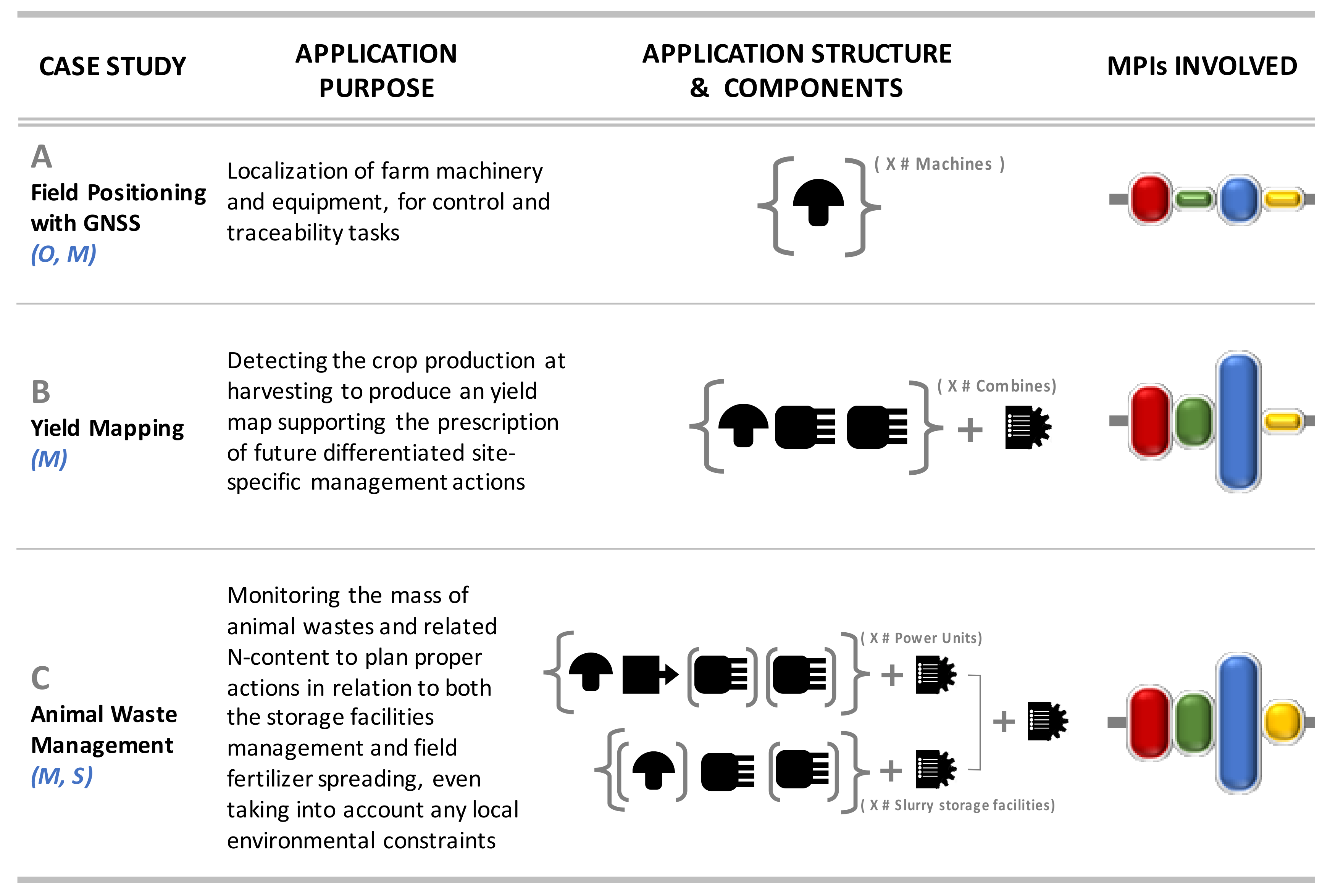
4.1. Field Positioning of Farm Machinery and Equipment
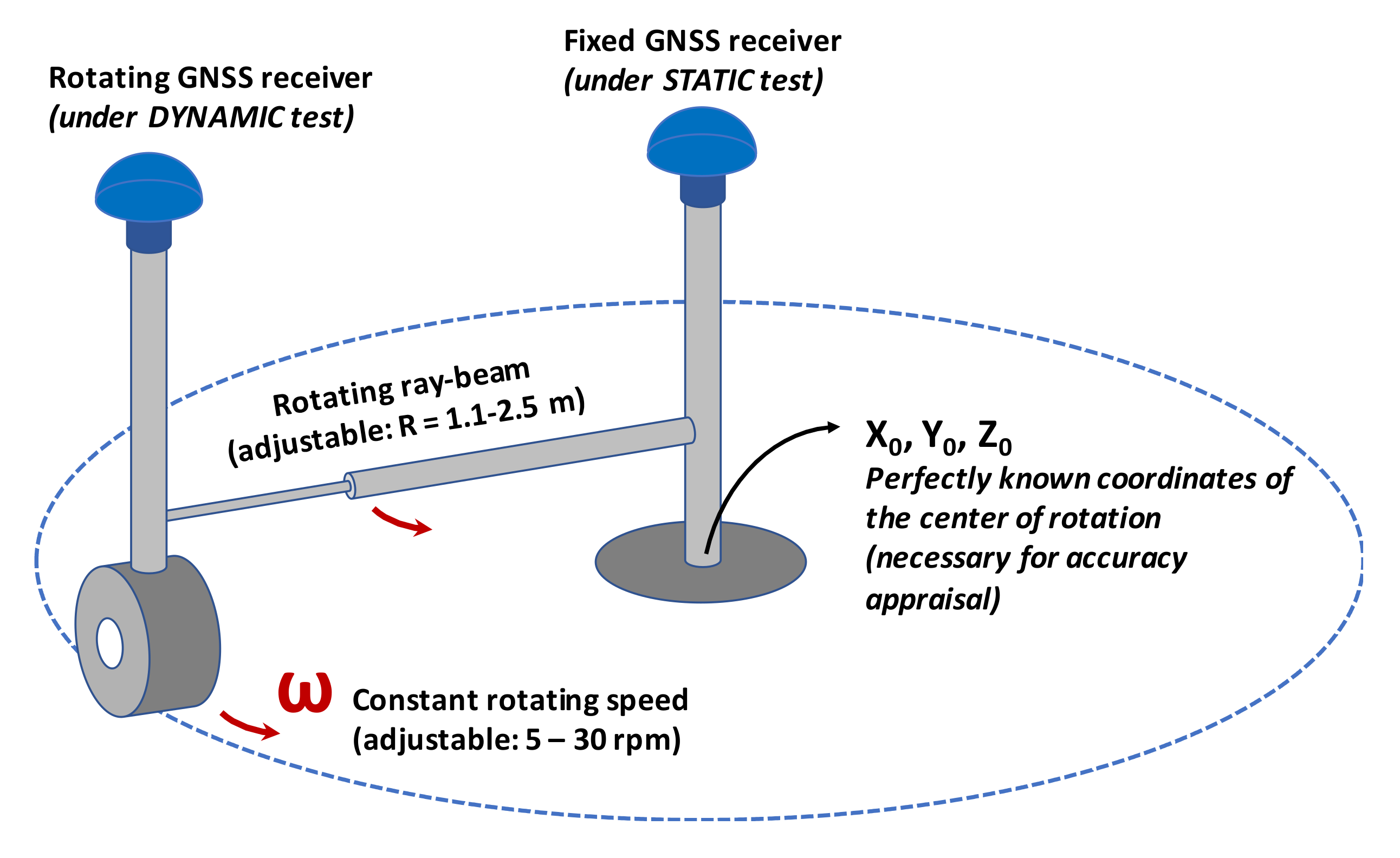
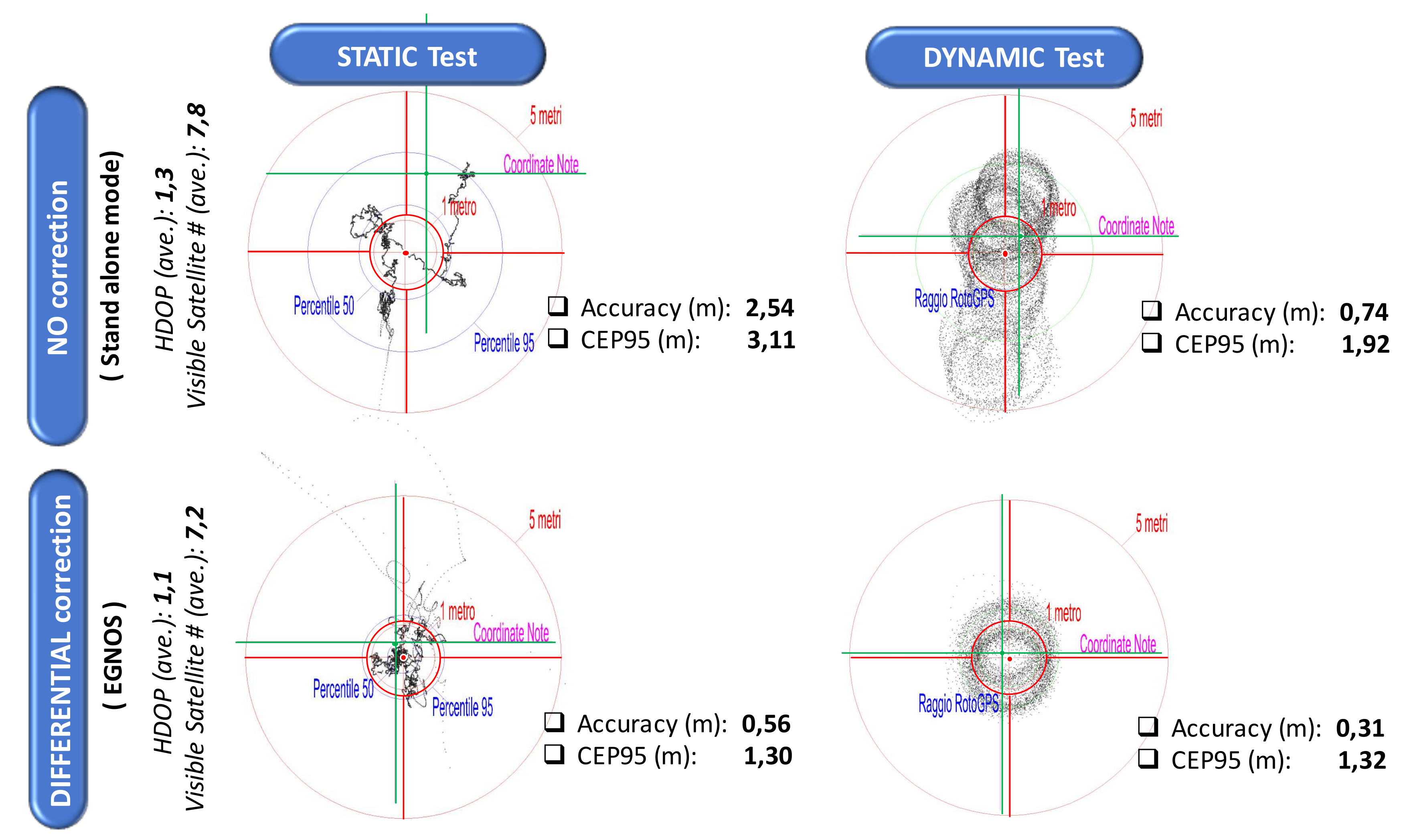
- in static tests, the position drift observable in the time sequence of fixings follows apparently random trajectories, mainly due to the arrangement of the satellite constellation visible from the receiver; every time the constellation changes there are variations in position, which in some cases can also be extremely significant despite the presence of a differential correction;
- in dynamic tests, the phenomena related to constellation variations are more evident since they have the effect of translating the “virtual” center of the rotation pivot in different points, with evidence of the permanence of different circular trajectories;
- as usually happens for many receiver models, the performance in dynamic tests tends to improve when compared to static tests; this is true for both accuracy and CEP95 (precision), given the geometrical effects of retracing the same trajectory several times; this aspect takes into greater consideration a behavior similar to that of many agricultural operations that process the same space even through adjacent parallel passes in sufficiently short time periods (e.g., swath guidance);
- the positive effects of the differential correction are very visible, also in this case both on accuracy and precision; the improvement is especially evident in the case of dynamic tests: with an accuracy that goes from 0.74 to 0.31 m and a CEP95 that varies from 1.95 to 1.32 m the overall result in the three hours of testing is very close—including visually—to the expected theoretical trajectory, with a considerable mitigation of the effects related to constellation changes;
- just for the effects related to the characteristics of the satellite constellation available during the tests, these should be performed only when the expected horizontal diluition of precision is HDOP < 2 (this condition, however, is easily verifiable a priori).
4.2. Yield Mapping
- from a cognitive point of view, it presupposes the downstream availability of a series of technologies at farm able to implement site-specific control interventions, consistent with the level of detail provided by these maps (e.g., differentiated soil tillage management, site-specific dosage of fertilizers and agrochemicals); such availability is not always verified, with consequent frustration of the perceived usefulness of the information provided by the yield maps;
- from a technological point of view, the data acquisition system that allows the realization of yield maps has represented for PF a first challenge of data fusion and integration of interpretative methods, with relevant implementation problems for constructors. Such difficulties have been always few perceived by farmers, as the latter are only focused in the prompt availability of a thematic map [43].
- (a)
- positioning by GNSS;
- (b)
- indirect instrumental measurement of grain flow (e.g., with sensor counting impact pulses on a metal intercepting surface);
- (c)
- indirect measurement of grain moisture (e.g., with capacitive sensors);
- (d)
- spatial synchronization between positioning data and flow data (depending on the construction features of the combine harvester, its working speed and the dynamics of transport of materials within it) [46];
- (e)
- projection of the data of a single fixing on a given surface (geostatistical elaboration, variable according to the intention to proceed with iso-production areas or with mosaic of cells of predefined shape and size) [47].
4.3. Animal Waste Management
- the measurement can be carried out in different ways, for example using pressure or ultrasonic sensors, to be placed, respectively, on the bottom of the tank or at a certain height with respect to the surface reachable from the maximum level; pressure sensors provide stable measurements over time, but involve serious maintenance problems being immersed in a rather corrosive environment; ultrasonic sensors have opposite features, with the addition of noises in measurements due to undesirable phenomena (uneven surface, often moved by the convective phenomena of fermentation, as well as subject to the growth of vegetation on the surface);
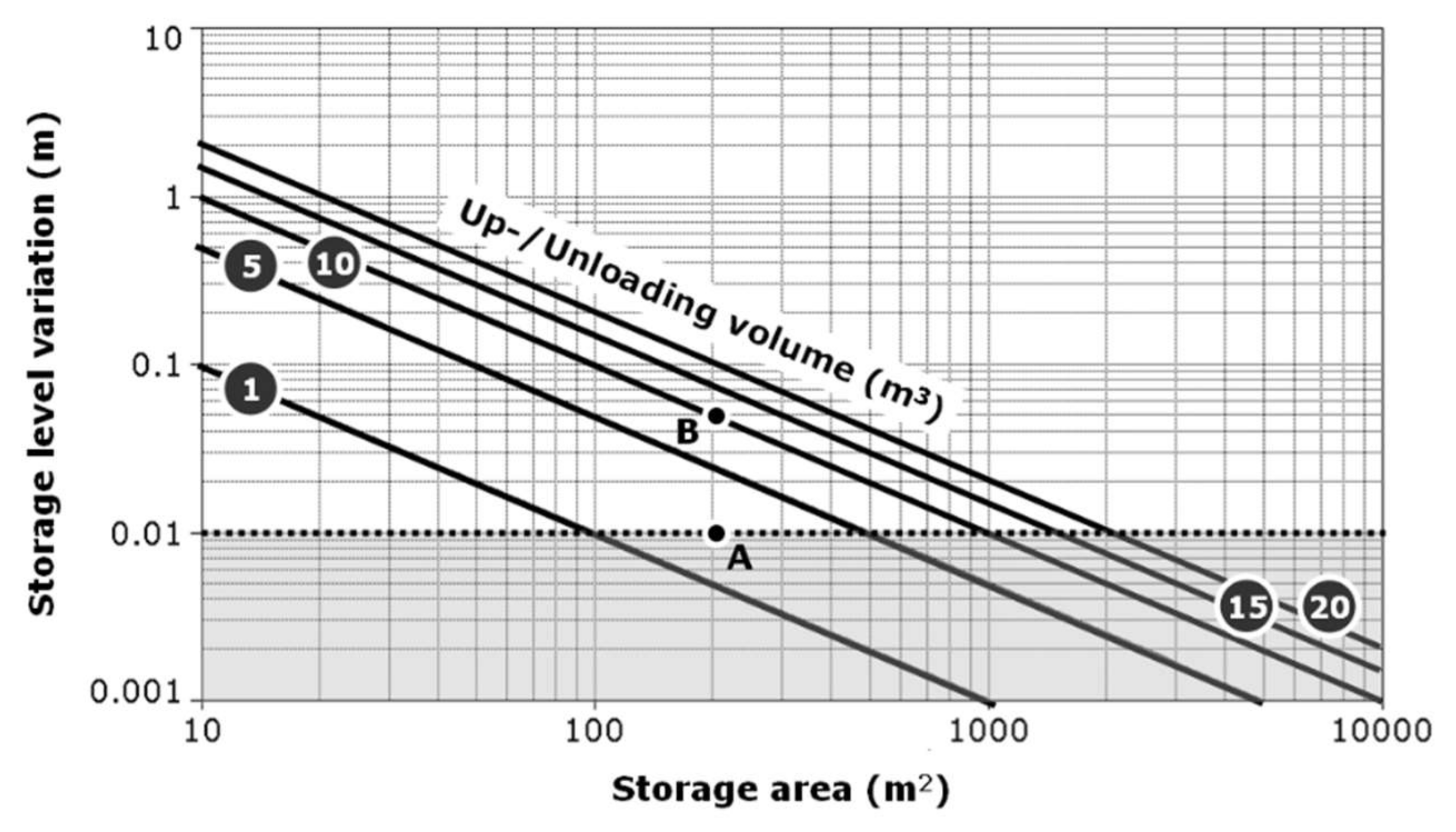
- level variations depend on the free area exposed in the storage facilities and the volumes transferred during each loading/unloading operation; the relationships among these three parameters is shown in Figure 11; here, it is highlighted that the acceptable tolerance threshold value for the level measurement provided by the afore mentioned sensors is theoretically around 1 cm; instruments with wider tolerances would be not very effective compared to the objectives of the control system; however, even with acceptable tolerances (2–3 cm), the measurements are generally affected by a significant noise, which makes it impossible to simply read values averaged or interpolated with conventional statistical methods; in this case, therefore, it becomes necessary to use an inference engine in order to fix the levels around stabilized reference values (benchmark levels) through signal analysis algorithms [57];
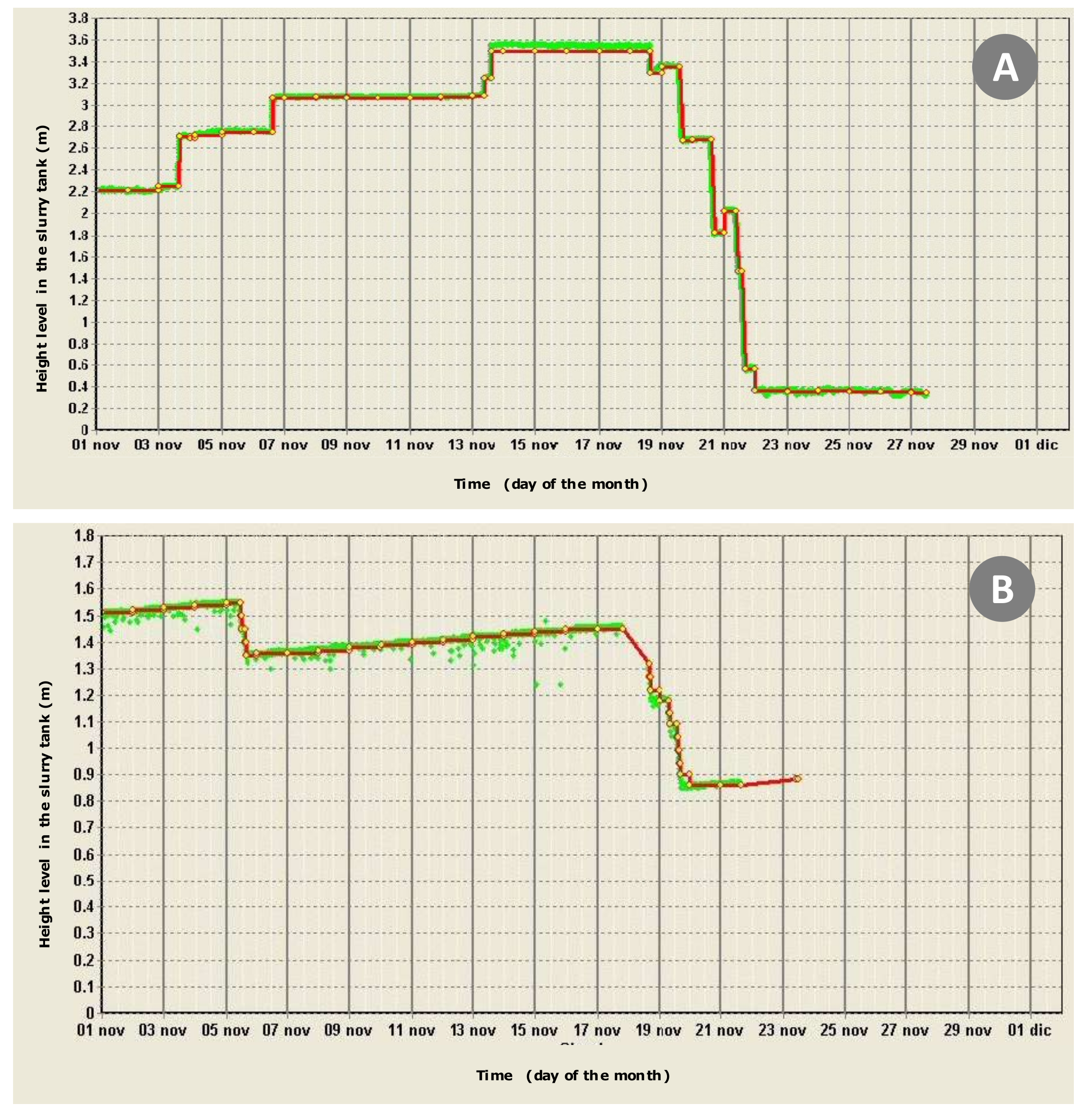
- according to Figure 11, shape and size of storage facilities directly affect the performance of monitoring activities; generally, aboveground cylindrical tanks with volumes up to 3000 m3 are able to highlight loading and unloading events with sufficient clarity. Conversely, parallelepiped-shaped slurry tanks placed under the grating floors of the stables with free-standing animals, are subject to a filling that takes place gradually all along the day; given their high extension (often >500 m2), the monitoring system only detects a progressive increase in levels, which can only be assessed over sufficiently long periods of time. Examples of these phenomena are shown in Figure 12.
5. Discussion and Conclusions
- it operates in an entrepreneurial environment closely related to the MPI-3 macro-domain, where the measures must support information to be used for solving decision-making problems that require different accuracies depending on the hierarchical level that must manage the decision itself; precise measures are not sought, but rather functional and satisfactory information with respect to a given objective; not infrequently, this objective must also meet requirements imposed by regulatory frameworks, to prove compliance of products and processes with administrative rules or best practice protocols;
- the information rarely originates from data obtained only from a single measuring instrument; these are usually indirect measurements resulting from the integration of several measuring systems (in turn derived from the combination of individual instruments);
- measurements are often not limited to the use of sensors (simple or complex sensors); by definition, a sensor is a power transducer that transforms the value of a physical or chemical quantity associated with real world phenomena into an intelligible message; in management environments, where SA is involved, it is often essential to recognize even the agents participating in a given event; hence the need to be able to integrate in data acquisition devices also identification systems, which operate on completely different logical and physical principles (comparison systems with reference elements) with respect to sensors; in their case, the concept of measurement accuracy is replaced by the concept of recognition accuracy and the verification of their performance requires its own approaches and metrics;
- many monitoring activities must be carried out under dynamic conditions, since the measurement/identification systems are mounted on moving means; this necessity, which in itself already complicates the measurement conditions, normally requires that every observation on the real world is also integrated with a position data for its instantaneous localization; hence, the need for positioning systems, which are neither sensors nor identification systems; in the case of GNSS, they are rather technologically similar to radio wave transmission systems and therefore require their own approaches for the verification of related performances;
- thus, the “final measurements” often derive from the integration of the responses from very different technological components; for their interpretation, it is almost always mandatory to use customized inference engines, often implemented on the specific needs of each measurement system, or the need to integrate measurements from multiple systems. However, the modeling interpretation is an integral part of the monitoring processes of SA and their behavior must be verified (validated) in the same way as any other technological hardware component.
- the intervention objectives and related decision-making strategies, seeking-where possible-to provide measurability criteria for the objectives;
- the minimum degree of efficacy allowed, always in relation to the decision-making objectives;
- the list of information necessary for the decision-making process, with the relative degree of reliability required (overall tolerance);
- for each item of information: specify the requirements for the measurement equipment (in terms of accuracy and precision) and for the related inference engines;
- the test modes in controllable environments for each measuring equipment, taking into account the different technological behavior of each component (sensor, identification system, positioning system);
- the validation methods for the most relevant interpretation procedures.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Agr-4.0 | Agriculture 4.0 |
| CEP95 | Radius of the Circle Error Probable, where 95% of the GNSS fixings would fall in |
| CNC | Computer Numerical Control |
| CPS | Cyber physical systems |
| DGNSS | Differential Global Navigation Satellite System |
| ERP | Enterprise Resource Planning |
| FORK | Field Operation Register Keeping |
| GNSS | Global Navigation Satellite System |
| HDOP | Horizontal Dilution of Precision |
| ICT | Information & Communication Technology |
| IIS | Integrated Information System |
| Ind-3.0 | Industry 3.0 |
| Ind-4.0 | Industry 4.0 |
| IoE | Internet of Everything |
| IoT | Internet of Things |
| IT | Information Technology |
| KM4.0 | Knowledge Management 4.0 |
| ML | Machine Learning |
| M2M | Machine to Machine Communications |
| MPI | Macrodomain of Prevailing Interest |
| MSS | Management Support Systems |
| NIR | Near Infra-Red band |
| NOP | Not Observable part of a system |
| OP | Observable part of a system |
| PF | Precision Farming |
| SA | Smart Agriculture |
| SDSS | Strategic Decision Support Systems |
| UML | Unified Modeling Language |
| US NRC | National Research Council of United States |
| WSN | Wireless Sensor Networks |
References
- Aubert, B.A.; Schroeder, A.; Grimaudo, J. IT as enabler of sustainable farming: An empirical analysis of farmers’ adoption decision of precision agriculture technology. Decis. Support Syst. 2012, 54, 510–520. [Google Scholar] [CrossRef] [Green Version]
- Cox, S. Information technology: The global key to precision agriculture and sustainability. Comput. Electron. Agric. 2002, 36, 93–111. [Google Scholar] [CrossRef]
- Wan, J.; Cai, H.; Zhou, K. Industrie 4.0: Enabling technologies. In Proceedings of the 2015 International Conference on Intelligent Computing and Internet of Things, Harbin, China, 17–18 January 2015; pp. 135–140. [Google Scholar]
- US NRC. Precision Agriculture in the 21st Century: Geospatial and Information Technologies in Crop Management. Comm. on Assessing Crop Yield, Site- Specific Farming, Information Systems and Res. Opportunities, Board on Agric; NRC National Academy Press: Washington, DC, USA, 1997; p. 149. [Google Scholar]
- Rao, M.S.; Suresh Babu, E.; Siva Naga Raju, P.; Kavati, I. Smart agriculture: Automated controlled monitoring system using internet of things. Int. J. Recent Technol. Eng. 2019, 8, 8778–8784. [Google Scholar]
- Gurnule, P.V. Economical smart agriculture monitoring system. Int. J. Recent Technol. Eng. 2019, 8, 3669–3671. [Google Scholar]
- Jin, X.-B.; Yang, N.-X.; Wang, X.-Y.; Bai, Y.-T.; Su, T.-L.; Kong, J.-L. Hybrid deep learning predictor for smart agriculture sensing based on empirical mode decomposition and gated recurrent unit group model. Sensors 2020, 20, 1334. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ciruela-Lorenzo, A.M.; Del-Aguila-Obra, A.R.; Padilla-Meléndez, A.; Plaza-Angulo, J.J. Digitalization of agri-cooperatives in the smart agriculture context. Proposal of a digital diagnosis tool. Sustainability 2020, 12, 1325. [Google Scholar] [CrossRef] [Green Version]
- Shamim, S.; Cang, S.; Yu, H.; Li, Y. Management approaches for Industry 4.0: A human resource management perspective. In Proceedings of the IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 5309–5316. [Google Scholar]
- Rodríguez-Molano, J.I.; Contreras-Bravo, L.E.; Rivas-Trujillo, E. Industry Knowledge Management Model 4.0. Proc. of the International Conference on Information Technology & Systems. In Advances in Intelligent Systems and Computing; Rocha, Á., Guarda, T., Eds.; Springer: Cham, Germany, 2018; Volume 721. [Google Scholar]
- Chiang, M.; Zhang, T. Fog and IoT: An Overview of Research Opportunities. IEEE Internet Things J. 2016, 3, 854–864. [Google Scholar] [CrossRef]
- Baccarelli, E.; Vinuenza Naranjo, P.G.; Shojafar, M.; Abawajy, J.H. Fog of everything: Energy-efficient networked computing architectures, research challenges, and a case study. IEEE Access 2017, 5, 9882–9910. [Google Scholar] [CrossRef]
- Morais, P.; Silva, N.; Mendes, J.; Adão, T.; Pádua, L.; López-Riquelme, J.A.; Pavón-Pulido, N.; João Sousa, J.; Peres, E. Mysense: A comprehensive data management environment to improve precision agriculture practices. Comput. Electron. Agric. 2019, 162, 882–894. [Google Scholar] [CrossRef]
- Sourav, K.; Arijit, S.; Ruhul, A. An overview of cloud-fog computing: Architectures, applications with security challenges. Secur. Priv. 2019, 2, 72. [Google Scholar]
- Tsipis, A.; Papamichail, A.; Koufoudakis, G.; Tsoumanis, G.; Polykalas, S.E.; Oikonomou, K. Latency-Adjustable Cloud/Fog Computing Architecture for Time-Sensitive Environmental Monitoring in Olive Groves. AgriEngineering 2020, 2, 175–205. [Google Scholar] [CrossRef] [Green Version]
- Candanedo, I.S.; Nieves, E.H.; González, S.R.; Martín, M.T.S.; Briones, A.G. Machine learning predictive model for industry 4.0. Commun. Comput. Inf. Sci. 2018, 877, 501–510. [Google Scholar]
- Bonnell, J. The importance of predictive, maintenance. Weld. J. 2019, 98, 62–64. [Google Scholar]
- Chuang, S.-Y.; Sahoo, N.; Lin, H.-W.; Chang, Y.-H. Predictive maintenance with sensor data analytics on a Raspberry Pi-based experimental platform. Sensors 2019, 19, 3884. [Google Scholar] [CrossRef] [Green Version]
- Short, M.; Twiddle, J. An industrial digitalization platform for condition monitoring and predictive maintenance of pumping equipment. Sensors 2019, 19, 3781. [Google Scholar] [CrossRef] [Green Version]
- Xie, N.F.; Wang, W.S.; Yang, Y. Ontology-based Agricultural Knowledge Acquisition and Application. In Proceedings of the 2nd IFIP Int. Conference Computer and Computing Technologies in Agriculture, Beijing, China, 18–20 October 2008; Springer: Heidelberg, Germany; Volume 1, pp. 349–357. [Google Scholar]
- Kim, J.Y.; Lee, C.G.; Baek, S.H.; Rhee, J.Y. Open farm information system data-exchange platform for interaction with agricultural information systems. Agric. Eng. Int. CIGR J. 2015, 17, 296–309. [Google Scholar]
- Mazzetto, F.; Gallo, R.; Riedl, M.; Sacco, P. Proposal of an ontological approach to design and analyse farm information systems to support Precision Agriculture techniques. IOP Conf. Ser. Earth Environ. Sci. 2019, 275, 012008. [Google Scholar] [CrossRef]
- Methlie, L. Data management for decision support systems. Database 1980, 12, 40–46. [Google Scholar]
- Westrup, C. Transforming organizations through systems analysis: Deploying new techniques for organizational analysis in Information Systems development. In Information Technology and Changes in Organizational Work; Orlikowski, W.J., Walsham, G., Jones, M.R., DeGross, J., Eds.; Springer: Boston, MA, USA, 1996; pp. 157–176. [Google Scholar]
- Drucker, P.F. Knowledge-worker productivity, the biggest challenge. IEEE Eng. Manag. Rev. 2006, 34, 29–39. [Google Scholar] [CrossRef]
- Rae, R.H.; Tan, K.H. Working knowledge: How to manage and retain contract workers knowledge. In Proceedings of the 22nd International Conference on Production Research ICPR, Iguassu Falls, Brazil, 28 July–1 August 2013. [Google Scholar]
- Anthony, R.N. Planning and Control: A Framework for Analysis; Harvard University Press: Cambridge, MA, USA, 1965. [Google Scholar]
- Sousa, M.J.; Dias, I.; Cruz, R.; Caracol, C. Information Management Systems in the Supply Chain; IGI Global: Hershey, PA, USA, 2016; pp. 469–485. [Google Scholar]
- Vansteenkiste, G.C. New Simulation Approaches to Ill-Defined Systems. In Systems Analysis and Simulation I. Advances in Simulation; Sydow, A., Tzafestas, S.G., Vichnevetsky, R., Eds.; Springer: New York, NY, USA, 1988; Volume 1. [Google Scholar]
- Kops, S.; Vangheluwe, H.; Claeys, F.; Vanrolleghem, P.; Yuan, Z.; Vansteenkiste, G. The Process of Model Building and Simulation of Ill-Defined Systems: Application to Wastewater Treatment. Math. Comput. Model. Dyn. Syst. 1999, 5, 298–312. [Google Scholar] [CrossRef]
- Ping, J.L.; Dobermann, A. Processing of yield map data. Precis. Agric. 2005, 6, 193–212. [Google Scholar] [CrossRef] [Green Version]
- Pierce, F.J.; Nowak, P. Aspects of Precision Agriculture. Adv. Agron. 1999, 67, 1–86. [Google Scholar]
- Stafford, J. GPS in Agriculture—A Growing Market. J. Navig. 1999, 52, 60–69. [Google Scholar] [CrossRef]
- Pérez Ruiz, M.; Upadhyaya, S. GNSS in Precision Agricultural Operations. In New Approach of Indoor and Outdoor Localization Systems; Intech: London, UK, 2012. [Google Scholar]
- Landonio, S.; ARVAtec srl, Rescaldina-MI, Italy. Personal communication, 2018.
- Mazzetto, F.; Azzoli, G.; Calcante, A.; Castelli, G. ROTOGPS: Uno strumento per la misura di precisione e accuratezza di ricevitori GPS (ROTOGPS: A tool for measuring accuracy and precision of GPS receivers). In L’ingegneria Agraria Per lo Sviluppo Sostenibile Dell’area Mediterranea; Blandini, G., Manetto, R., Eds.; GeoGrafica: Catania, Italy, 2005. [Google Scholar]
- Azzoli, G. II ROTOGPS: Uno Strumento Per La Valutazione Delle Prestazioni Di Ricevitori Gps in Ambienti Agricoli (The ROTOGPS: A Tool for Evaluating the Performance of GPS Receivers in Agricultural Environments). Master’s Thesis, Faculty of Agricultural Sciences, University of Milan, Milan, Italy, 2004. [Google Scholar]
- Mazzetto, F.; Gallo, R.; Importuni, P.; Petrera, S.; Sacco, P. Automatic filling of field activities register, from challenge into reality. Chem. Eng. Trans. 2017, 58, 667–672. [Google Scholar]
- Mazzetto, F.; Calcante, A. Highly automated vine cutting transplanter based on DGNSS-RTK technology integrated with hydraulic devices. Comput. Electron. Agric. 2011, 79, 20–29. [Google Scholar] [CrossRef]
- Keicher, R.; Seufert, H. Automatic guidance for agricultural vehicles in Europe. Comput. Electron. Agric. 2000, 25, 169–194. [Google Scholar] [CrossRef]
- Vega, A.; Córdoba, M.; Castro-Franco, M.; Balzarini, M. Protocol for automating error removal from yield maps. Precis. Agric. 2019, 20, 1030–1044. [Google Scholar] [CrossRef]
- Abramov, N.V. Yield mapping using satellite navigation systems. IOP Conf. Ser. Mater. Sci. Eng. 2019, 537, 062022. [Google Scholar] [CrossRef]
- Luck, J.D.; Fulton, J.P. Best Management Practices for Collecting Accurate Yield Data and Avoiding Errors during Harvest. Univ. Neb. Ext. Linc. NE 2014. Available online: https://bit.ly/2xrBBgI (accessed on 28 November 2017).
- Birrell, S.J.; Sudduth, K.A.; Borgelt, S.C. Comparison of sensors and techniques for crop yield mapping. EC2004. Comput. Electron. Agric. 1996, 14, 215–233. [Google Scholar] [CrossRef]
- Stafford, J.V.; Ambler, B.; Lark, R.M.; Catt, J. Mapping and interpreting the yield variation in cereal crops. Comput. Electron. Agric. 1996, 14, 101–119. [Google Scholar] [CrossRef]
- Louhaichi, M.; Young, W.C.; Johnson, E.D. Reliability of Yield Mapping System for Estimating Perennial Ryegrass Seed Yield. Aust. J. Basic Appl. Sci. 2013, 7, 133–138. [Google Scholar]
- Panten, K.; Haneklaus, S.; Schnug, E. Spatial accuracy of online yield mapping. Landbauforsch. Volkenrode 2002, 52, 205–209. [Google Scholar]
- Arslan, S.; Colvin, T.S. Grain yield mapping: Yield sensing, yield reconstruction, and errors. Precis. Agric. 2002, 3, 135–154. [Google Scholar] [CrossRef]
- Griffin, T.W.; Dobbins, C.L.; Vyn, T.J.; Florax, R.J.G.M.; Lowenberg-Deboer, J.M. Spatial analysis of yield monitor data: Case studies of on-farm trials and farm management decision making. Precis. Agric. 2008, 9, 269–283. [Google Scholar] [CrossRef] [Green Version]
- Marchant, B.; Rudolph, S.; Roques, S.; Kindred, D.; Gillingham, V.; Welham, S.; Coleman, C.; Sylvester-Bradley, R. Establishing the precision and robustness of farmers’ crop experiments. Field Crop. Res. 2019, 230, 31–45. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, X.; Zhao, C. Prescription Map Generation Intelligent System of Precision Agriculture Based on Web Services and WebGIS. In Proceedings of the 2009 International Conference on Management and Service Science, Wuhan, China, 20–22 September 2009; pp. 1–4. [Google Scholar]
- Rahelizatovo, N.C.; Gillespie, J.M. Factors influencing the implementation of best management practices in the dairy industry. J. Soil Water Conserv. 2004, 59, 166–175. [Google Scholar]
- Sacco, P.; Gallo, R.; Mazzetto, F. Data analysis and inference model for automating operational monitoring activities in Precision Farming and Precision Forestry applications. IOP Conf. Ser. Earth Environ. Sci. 2019, 275, 012013. [Google Scholar] [CrossRef]
- Calcante, A.; Mazzetto, F. Design, development and evaluation of a wireless system for the automatic identification of implements. Comput. Electron. Agric. 2014, 101, 118–127. [Google Scholar] [CrossRef]
- Gallo, R.; Carabin, G.; Vidoni, R.; Sacco, P.; Mazzetto, F. Solutions for the automation of operational monitoring activities for agricultural and forestry tasks. Bodenkultur 2018, 69, 131–140. [Google Scholar] [CrossRef] [Green Version]
- Ristorto, G.; Mazzetto, F.; Guglieri, G.; Quagliotti, F. Monitoring performances and cost estimation of multirotor Unmanned Aerial Systems in precision farming. Int. Conf. Unmanned Aircr. Syst. 2015, 7152329, 502–509. [Google Scholar]
- Mazzetto, F.; Sacco, P.; Calcante, A. Algorithms for the interpretation of continuous measurement of the slurry level in storage tanks. J. Agric. Eng. 2012, 43, 36–42. [Google Scholar] [CrossRef]
- Saeys, W.; Mouazen, A.M.; Ramon, H. Potential for onsite and online analysis of pig manure using visible and near infrared reflectance spectroscopy. Biosyst. Eng. 2005, 91, 393–402. [Google Scholar] [CrossRef]
- Provolo, G.; Martínez-Suller, L. In situ determination of slurry nutrient content by electrical conductivity. Bioresour. Technol. 2007, 98, 3235–3242. [Google Scholar] [CrossRef] [PubMed]
- Tamburini, E.; Castaldelli, G.; Ferrari, G.; Marchetti, M.G.; Pedrini, P.; Aschonitis, V.G. Onsite and online FT-NIR spectroscopy for the estimation of total nitrogen and moisture content in poultry manure. Environ. Technol. 2015, 36, 2285–2294. [Google Scholar] [CrossRef] [PubMed]
- Perricone, V.; Costa, A.; Calcante, A.; Agazzi, A.; Savoini, G.; Sesan, E.; Chiara, M.; Tangorra, F.M. TMR mixer wagon real time moisture measurement of animal forages. In Proceedings of the 2019 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Portici, Italy, 24–26 October 2019; pp. 247–250. [Google Scholar]
- Kaloxylos, A.; Groumas, A.; Sarris, V.; Katsikas, L.; Magdalinos, P.; Antoniou, E.; Politopoulou, Z.; Wolfert, S.; Brewster, C.; Eigenmann, R.; et al. A cloud-based farm management system: Architecture and implementation. Comput. Electron. Agric. 2014, 100, 168–179. [Google Scholar] [CrossRef]
- Bauerdick, J.; Piringer, G.; Gronauer, A.; Kral, I.; Bernhardt, H. Precision Grassland Farming—An overview of research and technology (Precision Grassland Farming—Ein überblick über Forschung und Technik). In Lecture Notes in Informatics (LNI), Proceedings Series of the Gesellschaft fur Informatik (GI); GI-Edition: Dresden, Germany, 2017; Volume 268, pp. 17–20. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
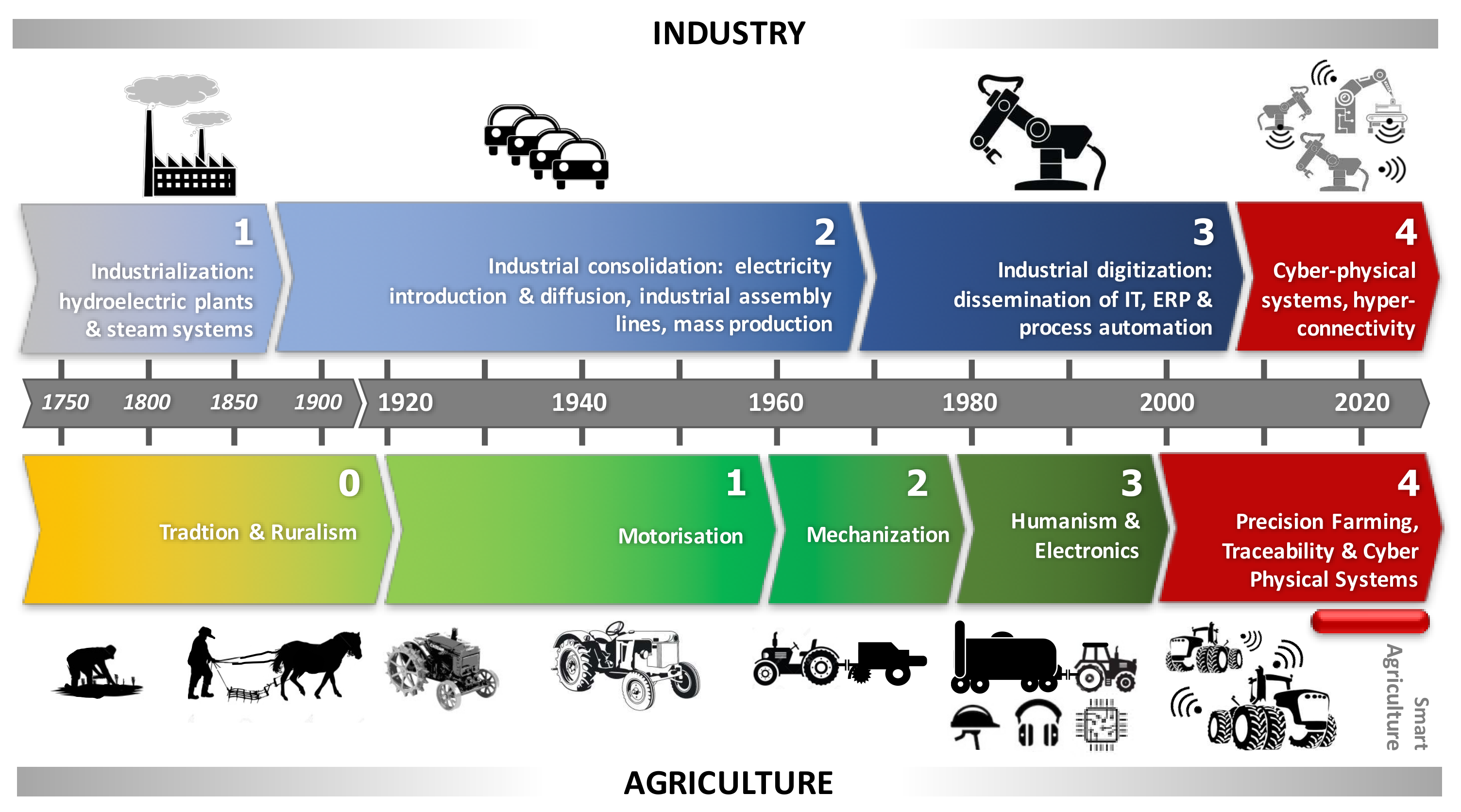
| Agriculture | Period | Name | Description |
|---|---|---|---|
| 0.0 | Until 1920 | Tradition and Ruralism | Prevalent use of manual labor force and animal traction; progressive transit towards motorized traction in the final phase. |
| 1.0 | 1920–1960 | Motorization | Introduction and diffusion of innovations in the tractor sector (diesel engines, hydraulic circuits, three-point linkage, “invention” of tires); the use of field manual labor continues to be prevalent; in Italy, this phase has been prolonged by autarkic rural policies wanted by Fascism; acceleration of the transition after World War II with the electrification of agricultural areas. |
| 2.0 | 1960–1980 | Mechanization | Tractor refinement with progressive increase of its nominal power and performances; strong development of the operating machines introduced in all farm production areas; fast replacement of the manual labor force and exodus from the countryside; increase of the primary yields also, thanks to the innovations in the genetic field and in the chemical industry. |
| 3.0 | 1980–2000 | Humanism and Electronics | Improvement of mechanized systems with greater attention to the man-machine relationship (ergonomics and safety); introduction of electronic control systems on board tractors and first fixed-point process automation solutions; first attempts to digitalize farm management, never fully and widely consolidated, except in specific sectors such as animal husbandry (especially in dairy farms). |
| 4.0 | After 2000 | PF, Traceability and Cyber Physical Systems (Smart Agriculture) | Consolidation of electronics and automation in all farm sectors, with a strong focus on the automation of mobile-point processes (site-specific control); diffusion of sensors in monitoring activities and on board tractor positioning systems; communication protocols between devices (CAN, ISOBUS, Wireless networks, Wi-Fi, Bluetooth, etc.); experiences in computerization and use of integrated information systems, especially in large farms; process connectivity and M2M communications; IoT and IoS; cloud and fog computing; proposals for proprietary solutions of farm information systems by major brands of the farm machinery market; product and process certification aimed at traceability systems |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mazzetto, F.; Gallo, R.; Sacco, P. Reflections and Methodological Proposals to Treat the Concept of “Information Precision” in Smart Agriculture Practices. Sensors 2020, 20, 2847. https://doi.org/10.3390/s20102847
Mazzetto F, Gallo R, Sacco P. Reflections and Methodological Proposals to Treat the Concept of “Information Precision” in Smart Agriculture Practices. Sensors. 2020; 20(10):2847. https://doi.org/10.3390/s20102847
Chicago/Turabian StyleMazzetto, Fabrizio, Raimondo Gallo, and Pasqualina Sacco. 2020. "Reflections and Methodological Proposals to Treat the Concept of “Information Precision” in Smart Agriculture Practices" Sensors 20, no. 10: 2847. https://doi.org/10.3390/s20102847
APA StyleMazzetto, F., Gallo, R., & Sacco, P. (2020). Reflections and Methodological Proposals to Treat the Concept of “Information Precision” in Smart Agriculture Practices. Sensors, 20(10), 2847. https://doi.org/10.3390/s20102847