Modification of MTEA-Based Temperature Drift Error Compensation Model for MEMS-Gyros


Abstract
:1. Introduction
2. Modification of TDE Compensation Model for MEMS-Gyros
2.1. Conventional TDE Compensation Model
2.2. Modified TDE Compensation Model
3. Design of Modified TDE Compensation Model
3.1. Design of Precise Test for Temperature Drift Error
- 1
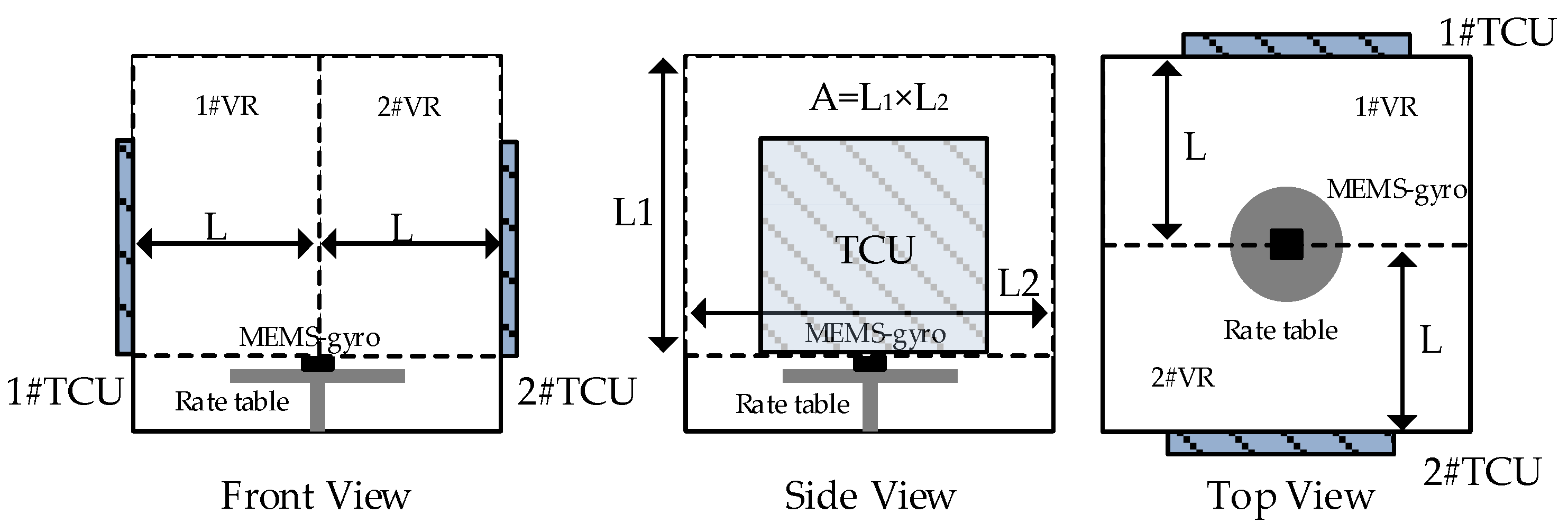
- MEMS-gyro was closely attached to a metal shell as a module with thermal silicone grease and installed on the precise rate table. The temperature sensor of precise temperature measurement system was attached closely to the metal shell and measures the temperature of MEMS-gyro . Get PC ready to record the data from MEMS-gyro in real time;
- 2
- Start the rate table at the target , while get PC ready to record the data from MEMS-gyro ;
- 3
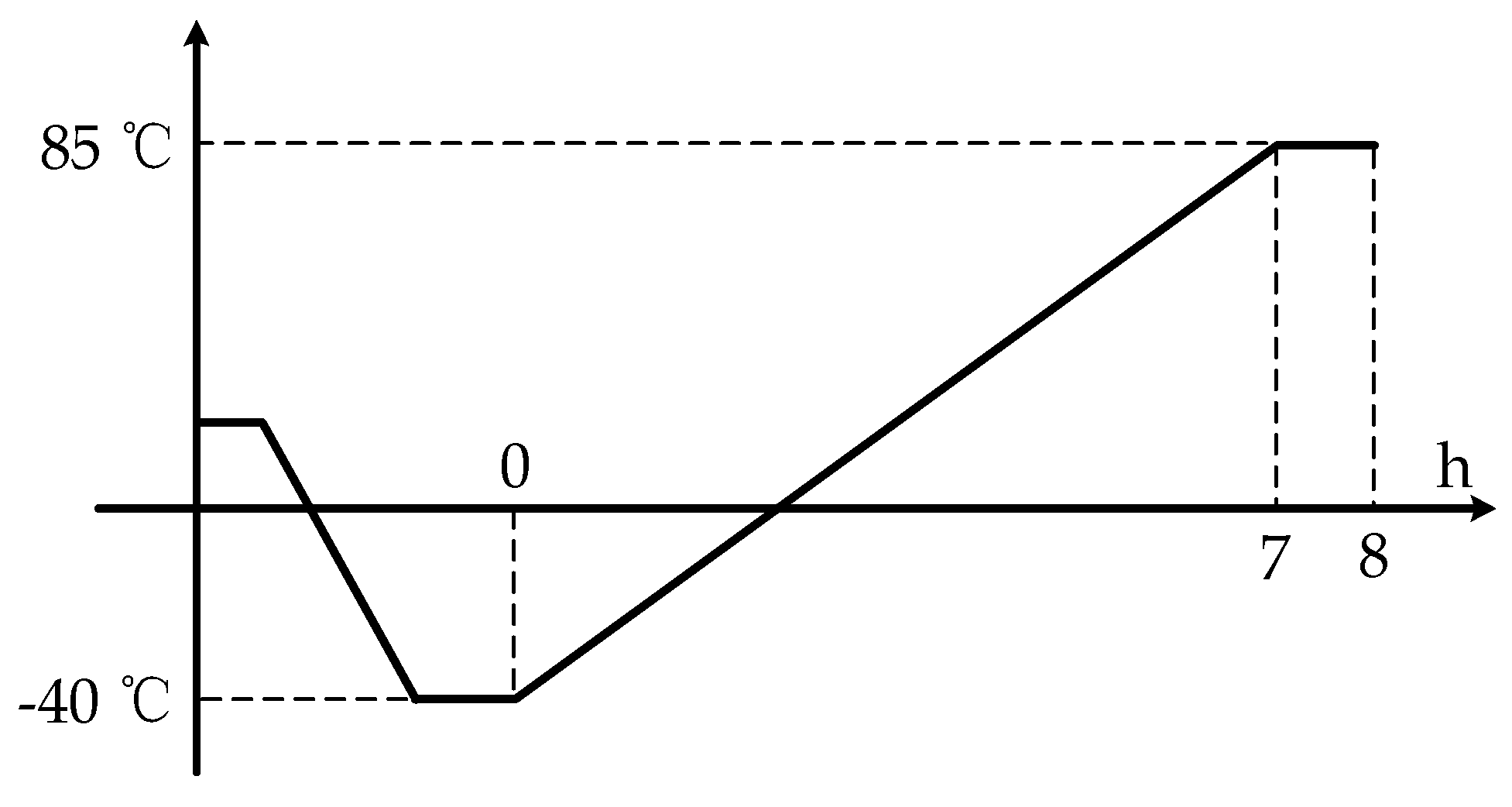
- Ambient temperature in thermal chamber goes down to −40 °C. After the data from MEMS-gyro and precise temperature measurement system are stable, start recording and ;
- 4
- Ambient temperature in the thermal chamber goes up to 85 °C at a heating rate of 18 °C/h and stop the experiment when the data from MEMS-gyro and precise temperature measurement system keep stable for 1 h. Meanwhile, all the data during this period are recorded;
- 5
- Repeat step (2) to step (4) 5 times and randomly select one group as the test data.
3.2. Parameter Identification for Modified TDE Compensation Model
- RBF ANN can avoid local minimums. Owing that RBF ANN works on the basis of Gaussian functions, the current results are optimal in global scope, even in complex conditions like some flat areas where error gradient approximate to zero.
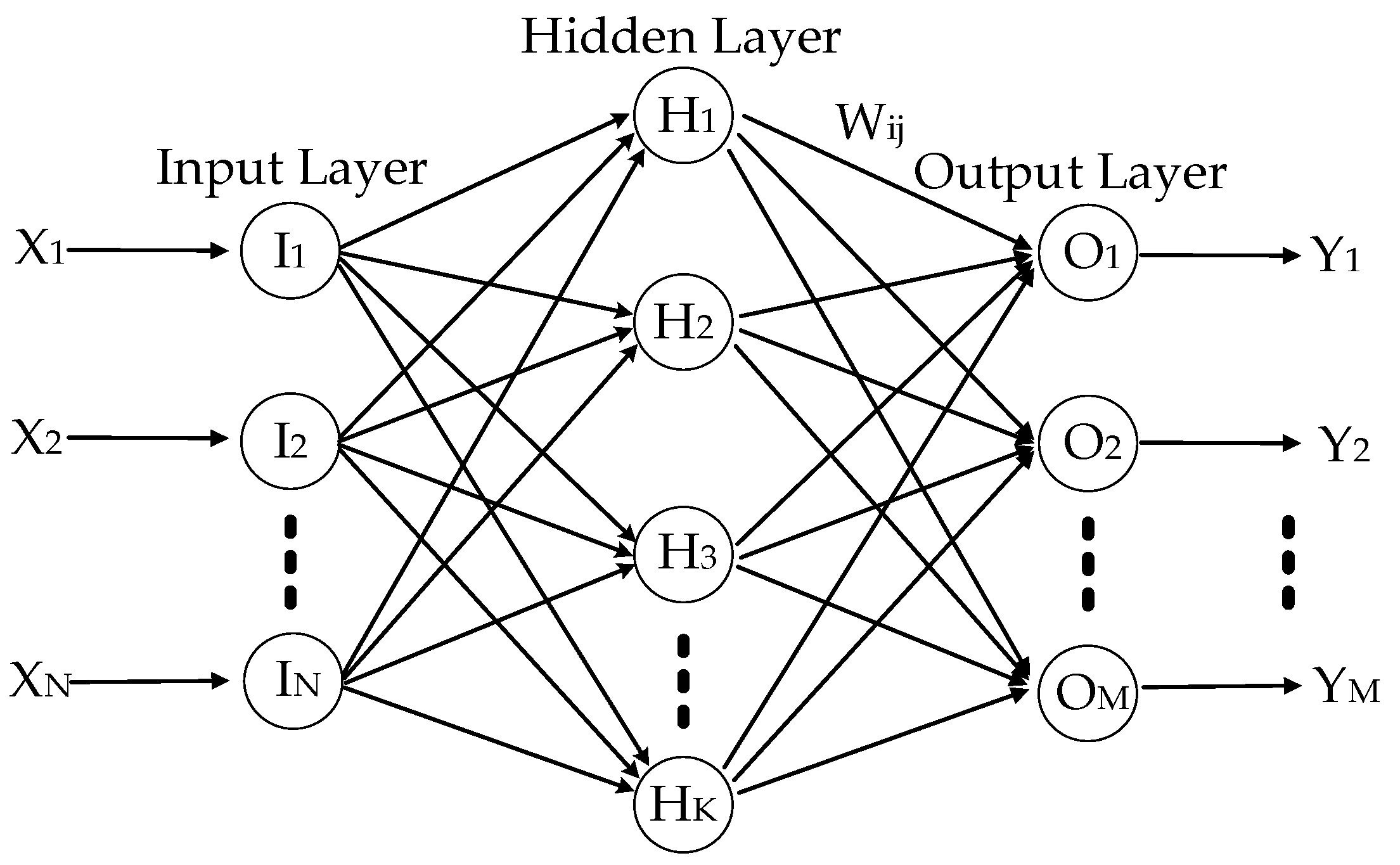
- According to Kolmogorov theorem, a three-layer forward network can approach any continuous function with any desired accuracy [18]. RBF ANN has the typical structure of input layer, hidden layer and output layer and is able to realize the nonlinearity in any accuracy. In addition—considering real time and the universality—the structure of the modified TDE compensation models should be as simple as possible. Hence, RBF ANN is good at improving the real time and the universality of TDE compensation models for MEMS-gyros.
- 1
- Two temperature experiments are carried out. The experimental data from one temperature experiments group are in training sample set and the other data are in verification sample set.
- 2
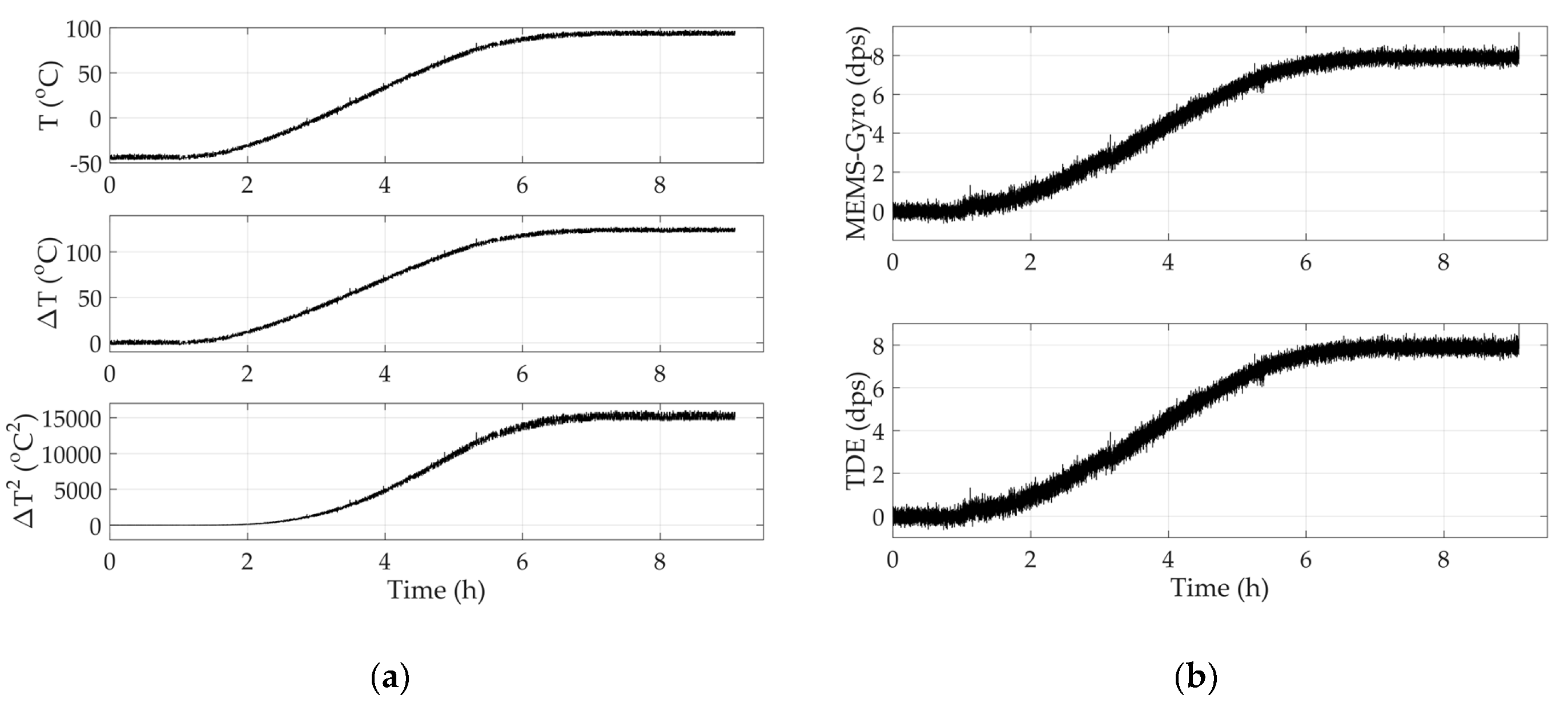
- The sample set of TDE is obtained by subtracting the reference outputs of MEMS-gyros from their actual outputs in the training sample set. The sample set of is obtained by subtracting the reference temperature of MEMS-gyros from their temperature in the training sample set, and is obtained by multiplying itself.
- 3
- RBF ANN is trained with and as the inputs and TDE as the output. Training will not stop until the differences between the outputs of RBF ANN and the corresponding TDE meet the design requirements.
- 4
- The compensated results are obtained from subtraction between the outputs of RBF ANN and the corresponding outputs of MEMS-gyros.
4. Comparison of Test Results Before and After Modification
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vetrella, A.R.; Fasano, G.; Accardo, D.; Moccia, A. Differential GNSS and vision-based tracking to improve navigation performance in cooperative multi-UAV systems. Sensors 2016, 16, 2164. [Google Scholar] [CrossRef] [PubMed]
- Renga, A.; Graziano, M.D.; D’Errico, M.; Moccia, A.; Menichino, F.; Vetrella, S.; Accardo, D.; Corraro, F.; Cuciniello, G.; Nebula, F. Galileo-based space-airborne bistatic SAR for UAS navigation. Aerosp. Sci. Technol. 2013, 27, 193–200. [Google Scholar] [CrossRef]
- Majdik, A.L.; Verda, D.; Albers-Schoenberg, Y.; Scaramuzza, D. Air-ground matching: Appearance-based GPS-denied urban localization of micro aerial vehicles. J. Robot. 2015, 32, 1015–1039. [Google Scholar] [CrossRef] [Green Version]
- Sanchez, J.; Denis, F.; Checchin, P.; Dupont, F.; Trassoudaine, L. Global Registration of 3D LiDAR Point Clouds Based on Scene Features: Application to Structured Environments. Remote. Sens. 2017, 9, 1014. [Google Scholar] [CrossRef] [Green Version]
- Hernández-Aceituno, J.; Arnay, R.; Toledo, J.; Acosta, L. Using Kinect on an Autonomous Vehicle for Outdoors Obstacle Detection. IEEE Sens. J. 2016, 16, 3603–3610. [Google Scholar] [CrossRef]
- Iuzzolino, M.; Accardo, D.; Rufino, G.; Oliva, E.; Tozzi, A.; Schipani, P. A cubesat payload for exoplanet detection. Sensors 2017, 17, 493. [Google Scholar] [CrossRef] [Green Version]
- Munguia, R.; Grau, A. A Practical Method for Implementing an Attitude and Heading Reference System. Int. J. Adv. Robot. Syst. 2014, 11, 62. [Google Scholar] [CrossRef] [Green Version]
- Chang, H.W.; Georgy, J.; El-Sheimy, N. Improved cycling navigation using inertial sensors measurements from portable devices with arbitrary orientation. IEEE Trans. Instrum. Meas. 2015, 64, 2012–2019. [Google Scholar] [CrossRef]
- Munguia, R.; Urzua, S.; Bolea, Y.; Grau, A. Vision-Based slam system for unmanned aerial vehicles. Sensors 2016, 16, 372. [Google Scholar] [CrossRef] [Green Version]
- Sheng, H.L.; Zhang, T.H. MEMS-based low-cost strap-down AHRS research. Eng. Meas. 2015, 59, 63–72. [Google Scholar] [CrossRef]
- Dan, L.H.; Ying, S.X.; Sheng, L.X. Application of Strongly Tracking Kalman Filter in MEMS Gyroscope Bias Compensation. In Proceedings of the 2017 6th International Conference on Advanced Materials and Computer Science, Zhengzhou, China, 29–30 April 2017; pp. 23–29. [Google Scholar]
- DeBruin, J. Control systems for Mobile Satcom antennas-Establishing and maintaining high-bandwidth satellite links during vehicle motion. IEEE Control Syst. Mag. 2008, 28, 86–101. [Google Scholar]
- Qi, B.; Cheng, J.H.; Zhao, L. A Novel Temperature Drift Error Model for MEMS Capacitive Accelerometer. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference, Chongqing, China, 24–26 March 2017; pp. 182–186. [Google Scholar]
- Yang, C.; Li, H.S. Digital control system for the MEMS tuning fork gyroscope based on synchronous integral demodulator. IEEE Sens. J. 2015, 15, 5755–5764. [Google Scholar] [CrossRef]
- Zhang, L.; Masek, V.; Sanatdoost, N. Structural optimization of Z-axis tuning-fork MEMS gyroscopes for enhancing reliability and resolution. Microsyst. Technol. 2014, 21, 1187–1201. [Google Scholar] [CrossRef]
- Tanaka, M. An Overview of Quartz MEMS Devices. In Proceedings of the 2010 IEEE International Frequency Control Symposium, Newport Beach, CA, USA, 1–4 June 2010; pp. 162–167. [Google Scholar]
- Liu, D.C.; Chi, X.Z.; Cui, J.; Lin, L.T. Research on temperature dependent characteristics and compensation methods for digital gyroscope. In Proceedings of the 3rd International Conference on Sensing Technology, Taiwan, China, 30 November–3 December 2008; pp. 273–277. [Google Scholar]
- Cheng, J.H.; Qi, B.; Chen, D.D.; Landry, R.J. Modification of an RBF ANN-Based Temperature Compensation Model of Interferometric Fiber Optical Gyroscopes. Sensors 2015, 15, 11189–11207. [Google Scholar] [CrossRef] [Green Version]
- Du, J.Y.; Gerdtman, C.; Linden, M. Signal processing algorithms for temperature drift in a MEMS-gyro-based head mouse. In Proceedings of the 21ST International Conference on Systems, Signals and Image Processing, Dubrovnik, Croatia, 12–14 May 2014; pp. 123–126. [Google Scholar]
- Fontanella, R.; Accardo, D.; Lo Moriello, R.S.; Angrisani, L.; De Simone, D. An Innovative Strategy for Accurate Thermal Compensation of Gyro Bias in Inertial Units by Exploiting a Novel Augmented Kalman Filter. Sensors 2018, 18, 1457. [Google Scholar] [CrossRef] [Green Version]
- Gunhan, Y.; Unsal, D. Polynomial degree determination for temperature dependent error compensation of inertial sensors. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1209–1212. [Google Scholar]
- Zhang, B.Q.; Chu, H.R.; Sun, T.T.; Guo, L.H. Thermal calibration of a tri-axial MEMS gyroscope based on parameter-interpolation method. Sens. A Phys. 2017, 261, 103–116. [Google Scholar] [CrossRef]
- Chen, X.Y.; Xu, C.Y. Neural network modeling for FOG zero point drift based on forward linear prediction algorithm. J. Chin. Inert. Technol. 2007, 15, 334–337. [Google Scholar]
- Doostdar, P.; Keighobadi, J. Design and implementation of SMO for a nonlinear MIMO AHRS. Mech. Syst. Process. 2012, 32, 94–115. [Google Scholar] [CrossRef]
- Prikhodko, I.P.; Trusov, A.A.; Shkel, A.M. Compensation of drifts in high-Q MEMS gyroscopes using temperature self-sensing. Sens. A Phys. 2013, 201, 517–524. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.C.; Su, Z.; Li, Q.; Li, C.; Zhao, H. Error Characteristics and Compensation Methods of MIMU with Non-centroid Configurations. In Proceedings of the 37th Chinese Control Conference, Wuhan, China, 25–27 July 2018; pp. 4877–4882. [Google Scholar]
- Zheng, H.; Yuan, D.; Yang, J.B.; Chen, F. Hardware Design of Virtual Gyroscope Based on Array Technology. In Proceedings of the 2017 2nd International Conference on Frontiers of Sensors Technologies, Shenzhen, China, 14–16 April 2017; pp. 24–27. [Google Scholar]
- Bourgeteau, B.; Levy, R.; Lavenus, P.; Le Traon, O. Multiphysical Finite Element Modeling of a Quartz Micro-Resonator Thermal Sensitivity. In Proceedings of the 2015 Symposium on Design Test Integration and Packaging of MEMS and MOEMS, Montpellier, France, 27–30 April 2015. [Google Scholar]
- Fontanella, R.; Accardo, D.; Lo Moriello, R.S. MEMS gyros temperature calibration through artificial neural networks. Sens. A Phys. 2018, 279, 553–565. [Google Scholar] [CrossRef]
- Xia, D.Z.; Chen, S.L.; Wang, S.R.; Li, H.S. Microgyroscope temperature effects and compensation-control methods. Sensors 2009, 9, 8349–8376. [Google Scholar] [CrossRef] [PubMed]
- Fontanella, R.; Accardo, D.; Lo Moriello, R.S. An Extensive Analysis for the use of Back Propagation Neural Networks to Perform the Calibration of MEMS Gyro Bias Thermal Drift. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 672–680. [Google Scholar]
- Bekkeng, J.K. Calibration of a Novel MEMS Inertial Reference Unit. IEEE Trans. Instrum. Meas. 2009, 58, 1967–1974. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| . | Principle | Merits | Demerits |
|---|---|---|---|
| Tuning fork gyro | Coriolis effect and momentum conservation | Low cost Simple implementation | Low precision |
| Piezoelectric gyro | Coriolis effect and Piezoelectric effect | Long service life High reliability | Worse environmental adaptability |
| MEMS-gyro | Coriolis effect and capacitor | Low cost and small size Higher precision | Bad environmental adaptability |
| HR-gyro | Coriolis effect and precession effect of standing wave in radial vibration | Highest precision High bandwidth Strong overload | High cost Complex implementation |
| BS1 (The Primary Data) | BS2 (After Compensation) | Improvement (BS2/BS1) | |
|---|---|---|---|
| 1st experiment | 30.0402 | 7.882 × 10−3 | 2.6239 × 10−4 |
| 2nd experiment | 29.3837 | 5.641 × 10−3 | 1.9199 × 10−4 |
| 3rd experiment | 28.3816 | 5.615 × 10−3 | 1.9782 × 10−4 |
| 4th experiment | 29.2548 | 5.630 × 10−3 | 1.9244 × 10−4 |
| 5th experiment | 29.4201 | 5.758 × 10−3 | 1.9570 × 10−4 |
| BS1 | BS2 | BS3 | P1 | P2 | P3 = P2/P1 | |
|---|---|---|---|---|---|---|
| x-axis | 15.3711 | 0.0055 | 3.885 × 10−4 | 3.594 × 10−4 | 2.528 × 10−5 | 7.03% |
| y-axis | 29.2621 | 0.0077 | 6.201 × 10−4 | 2.617 × 10−4 | 2.119 × 10−5 | 8.09% |
| z-axis | 1.5336 | 0.0075 | 4.571 × 10−4 | 4.889 × 10−3 | 2.980 × 10−4 | 6.09% |
| BS1 | BS2 | BS3 | P1 | P2 | P3 = P2/P1 | |
|---|---|---|---|---|---|---|
| x-axis | 15.0619 | 0.0167 | 1.716 × 10−3 | 1.111 × 10−3 | 1.139 × 10−4 | 10.26% |
| y-axis | 28.6982 | 0.0188 | 1.879 × 10−3 | 6.558 × 10−4 | 6.549 × 10−5 | 9.99% |
| z-axis | 1.5975 | 0.0177 | 1.807 × 10−3 | 1.109 × 10−2 | 1.131 × 10−3 | 10.19% |
| BS1 | BS2 | BS3 | P1 | P2 | P3 = P2/P1 | |
|---|---|---|---|---|---|---|
| x-axis | 15.7015 | 0.0174 | 1.654 × 10−3 | 1.109 × 10−3 | 1.054 × 10−4 | 9.49% |
| y-axis | 29.1082 | 0.0180 | 1.737 × 10−3 | 6.183 × 10−4 | 5.969 × 10−5 | 9.65% |
| z-axis | 1.5472 | 0.0184 | 1.904 × 10−3 | 1.190 × 10−2 | 1.231 × 10−3 | 10.34% |
| BS1 | BS2 | BS3 | P1 | P2 | P3 = P2/P1 | |
|---|---|---|---|---|---|---|
| x-axis | 15.6523 | 0.0179 | 1.870 × 10−3 | 1.146 × 10−3 | 1.195 × 10−4 | 10.42% |
| y-axis | 29.0114 | 0.0187 | 1.813 × 10−3 | 6.449 × 10−4 | 6.249 × 10−5 | 9.69% |
| z-axis | 1.4089 | 0.0180 | 1.740 × 10−3 | 1.275 × 10−2 | 1.235 × 10−3 | 9.69% |
| BS1 | BS2 | BS3 | P1 | P2 | P3 = P2/P1 | |
|---|---|---|---|---|---|---|
| x-axis | 15.3746 | 0.0172 | 1.749 × 10−3 | 1.117 × 10−3 | 1.138 × 10−4 | 10.18% |
| y-axis | 29.4375 | 0.0186 | 1.757 × 10−3 | 6.319 × 10−4 | 5.970 × 10−5 | 9.45% |
| z-axis | 1.5811 | 0.0185 | 2.038 × 10−3 | 1.171 × 10−2 | 1.289 × 10−3 | 11.01% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, B.; Wen, F.; Liu, F.; Cheng, J. Modification of MTEA-Based Temperature Drift Error Compensation Model for MEMS-Gyros. Sensors 2020, 20, 2906. https://doi.org/10.3390/s20102906
Qi B, Wen F, Liu F, Cheng J. Modification of MTEA-Based Temperature Drift Error Compensation Model for MEMS-Gyros. Sensors. 2020; 20(10):2906. https://doi.org/10.3390/s20102906
Chicago/Turabian StyleQi, Bing, Fuzhong Wen, Fanming Liu, and Jianhua Cheng. 2020. "Modification of MTEA-Based Temperature Drift Error Compensation Model for MEMS-Gyros" Sensors 20, no. 10: 2906. https://doi.org/10.3390/s20102906
APA StyleQi, B., Wen, F., Liu, F., & Cheng, J. (2020). Modification of MTEA-Based Temperature Drift Error Compensation Model for MEMS-Gyros. Sensors, 20(10), 2906. https://doi.org/10.3390/s20102906