Study on the Influence of Measuring AE Sensor Type on the Effectiveness of OLTC Defect Classification



Abstract
:1. Introduction
2. Materials and Methods
2.1. Measurement Setup
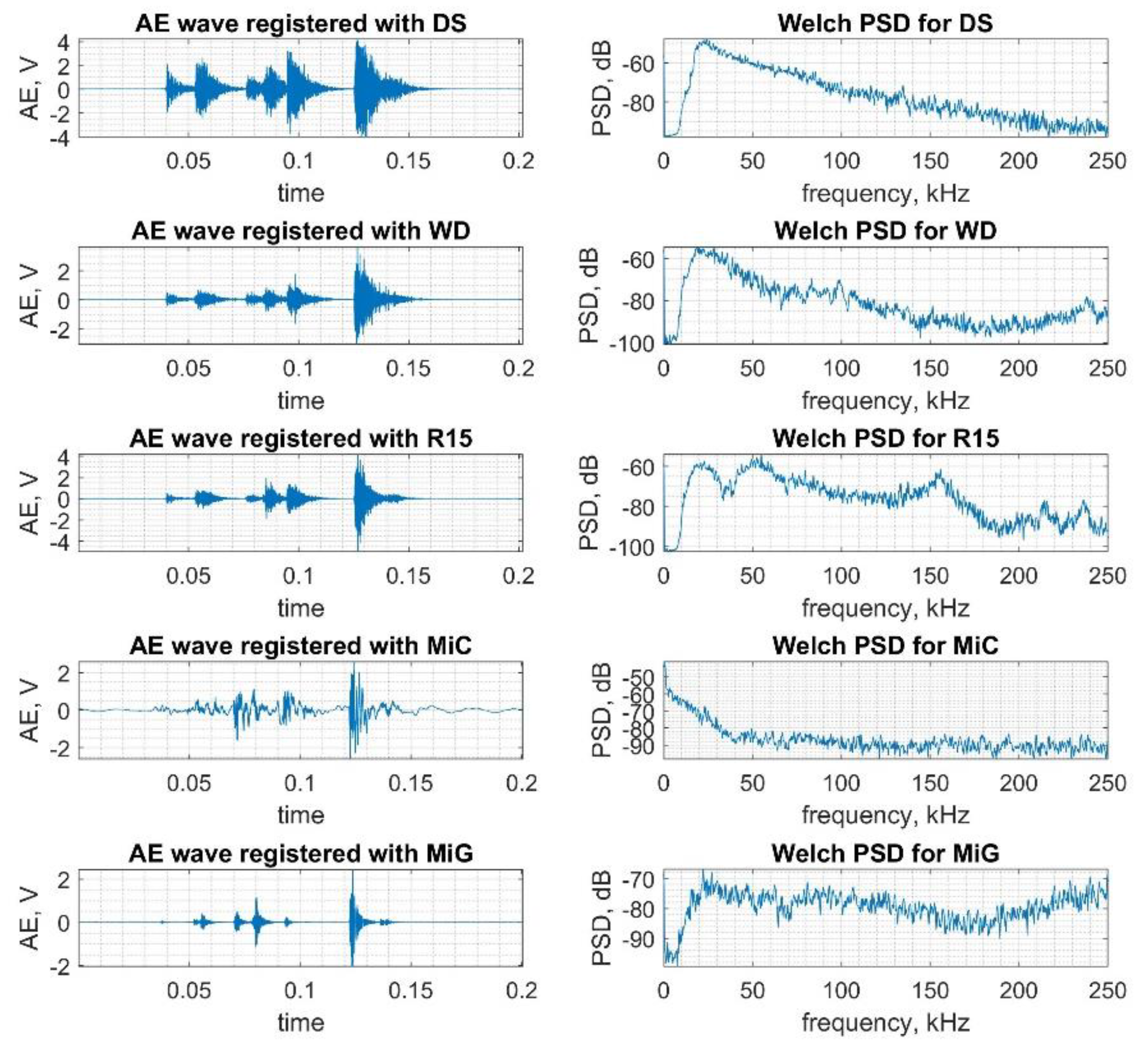
2.1.1. Sensors Applied for Measurements
- Broadband contact transmitter WD AH 17 (by Physical Acoustics Corporation) [29], marked as WD;
- Contact transducer D9241A (by Physical Acoustics Corporation) [30], marked as DS;
- Narrowband contact transducer R-15a (by Physical Acoustics Corporation) [31], marked as R15;
- Hydrophone 8103 (by Brüel & Kjær) [32], marked as MiG;
- Hydrophone TC4038 (by Reson) [33] marked as MiC.
2.1.2. Measurement Settings
2.1.3. OLTC Defects Considered
- Class C1: No damage - power switch operation with new contacts.
- Class C2: Operation of the power switch with 1 mm thick contacts.
- Class C3: Operation of the power switch with 2 mm thick contacts.
- Class C4: Operation of the power switch with 3 mm thick contacts.
- Class C5: Non-simultaneous operation of the power switch contacts.
2.1.4. Measurement Disturbances
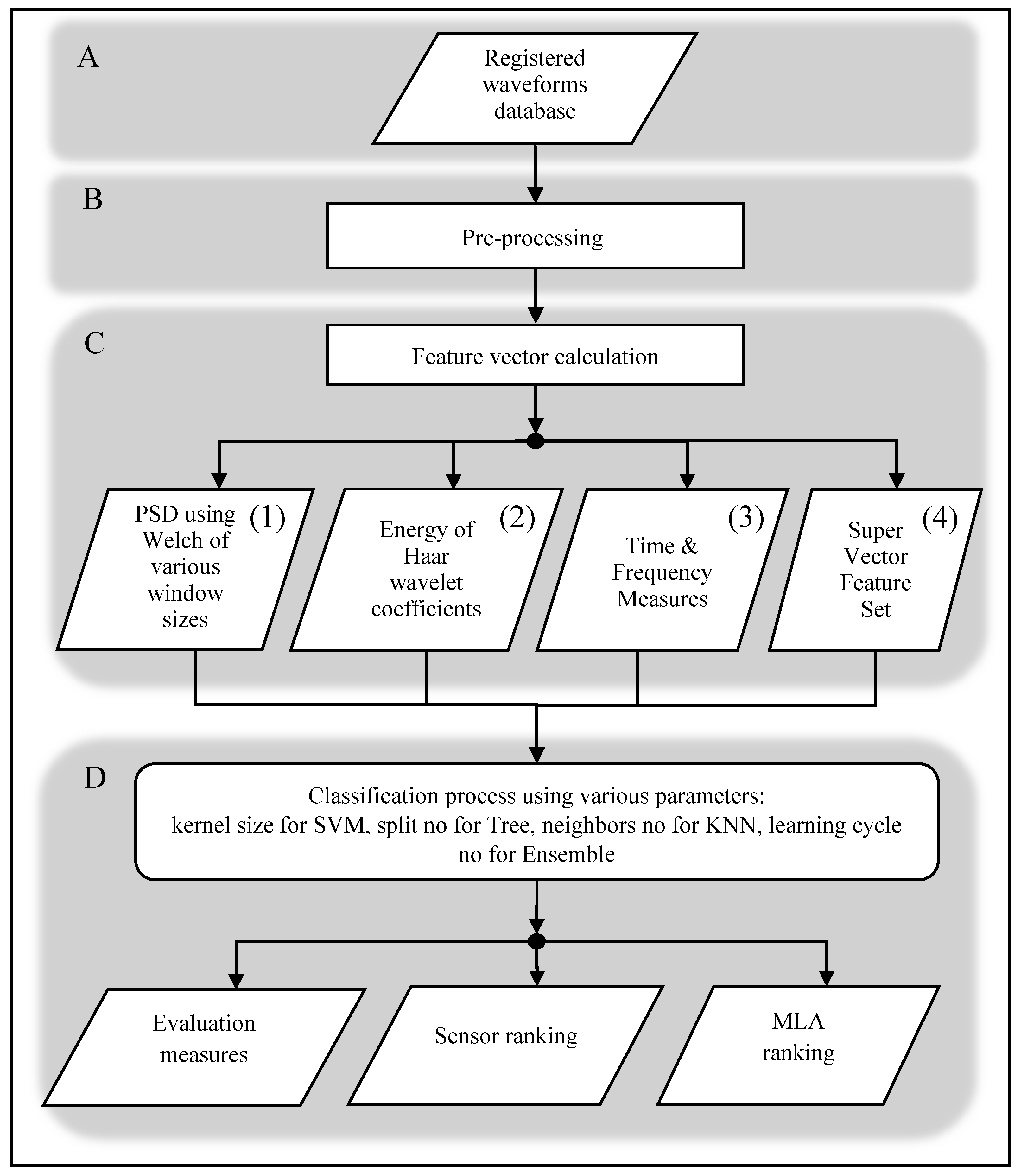
2.2. Data Analysis and Classification Methods
3. Results and Discussion
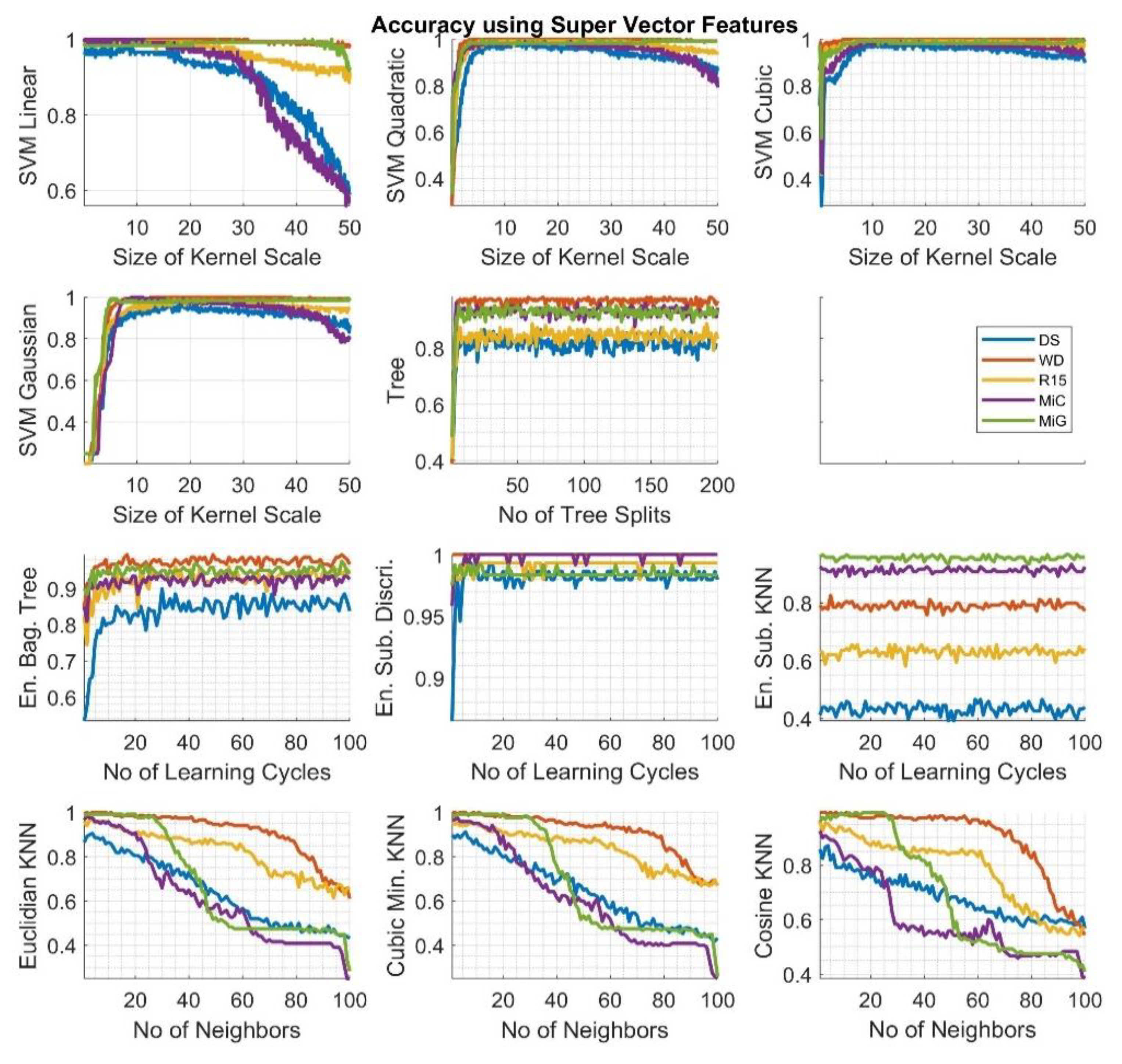
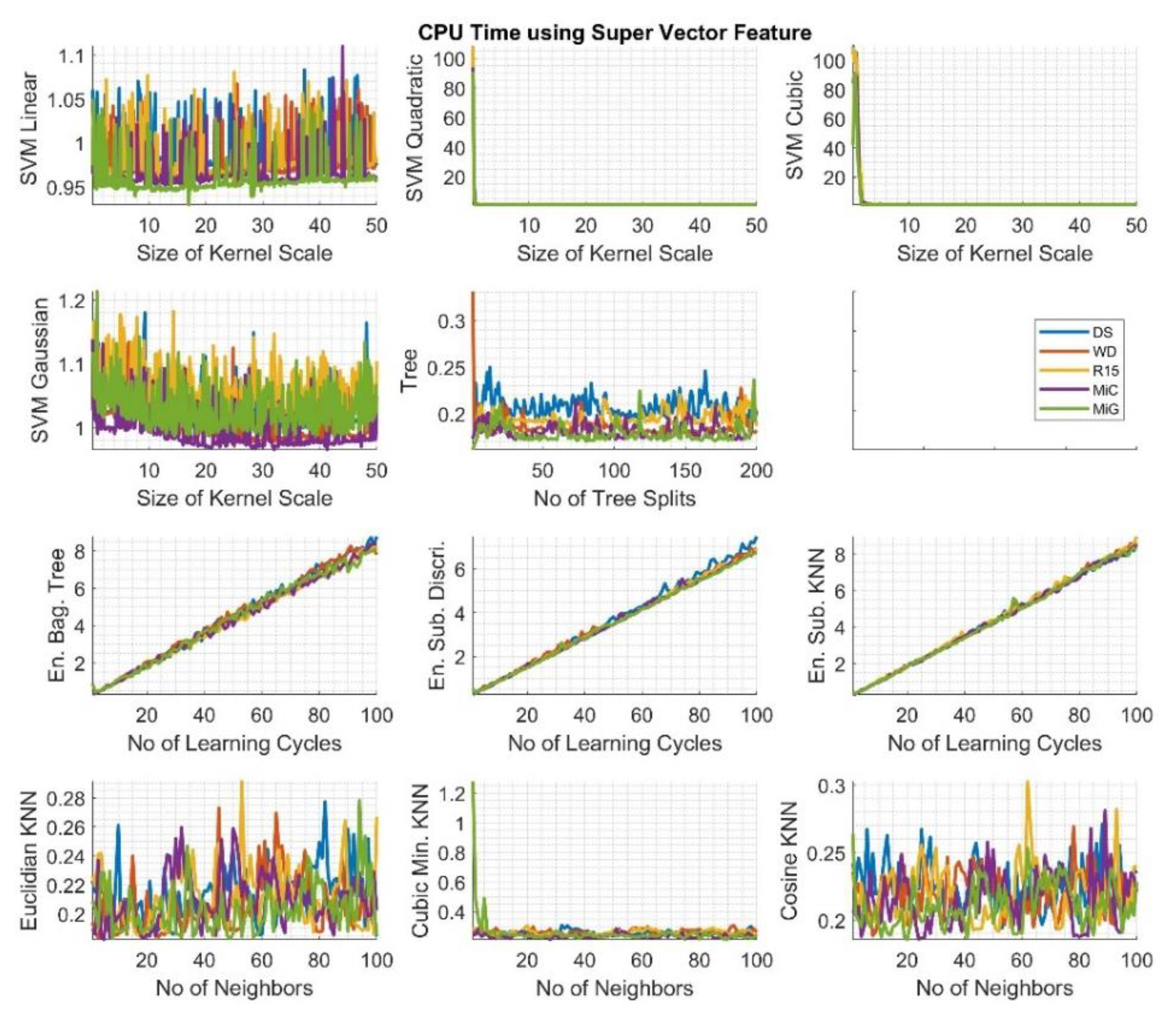
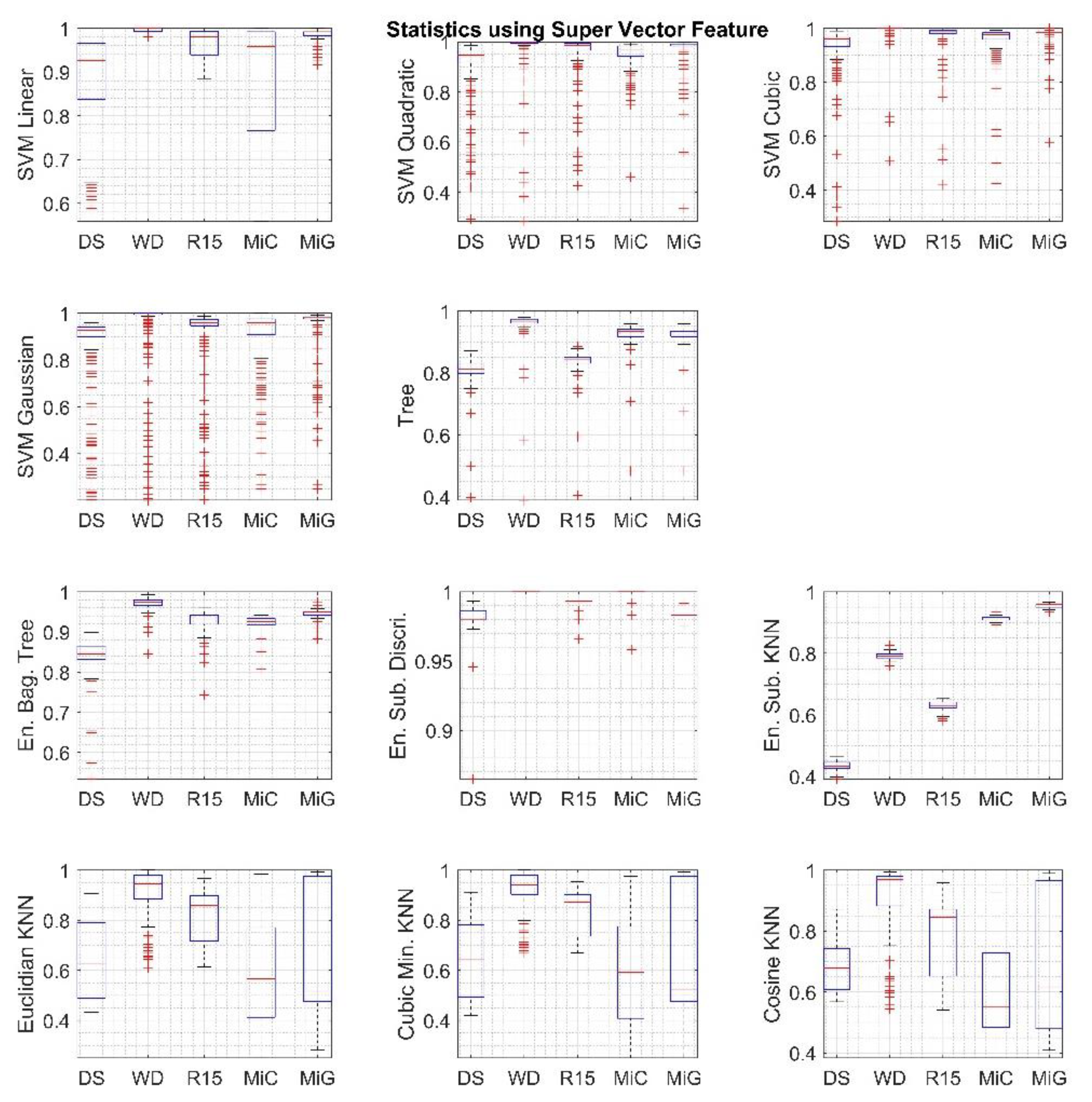
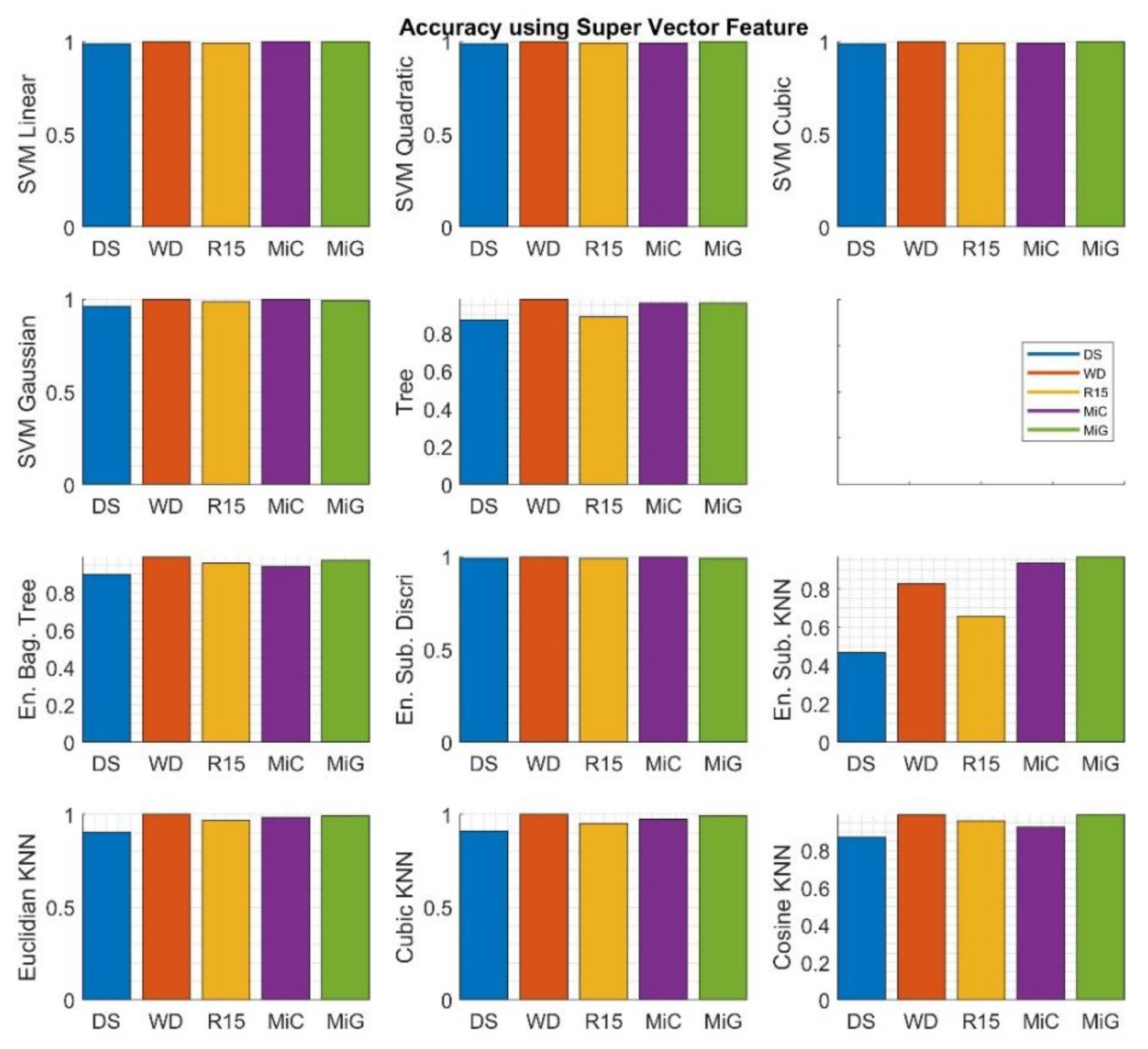
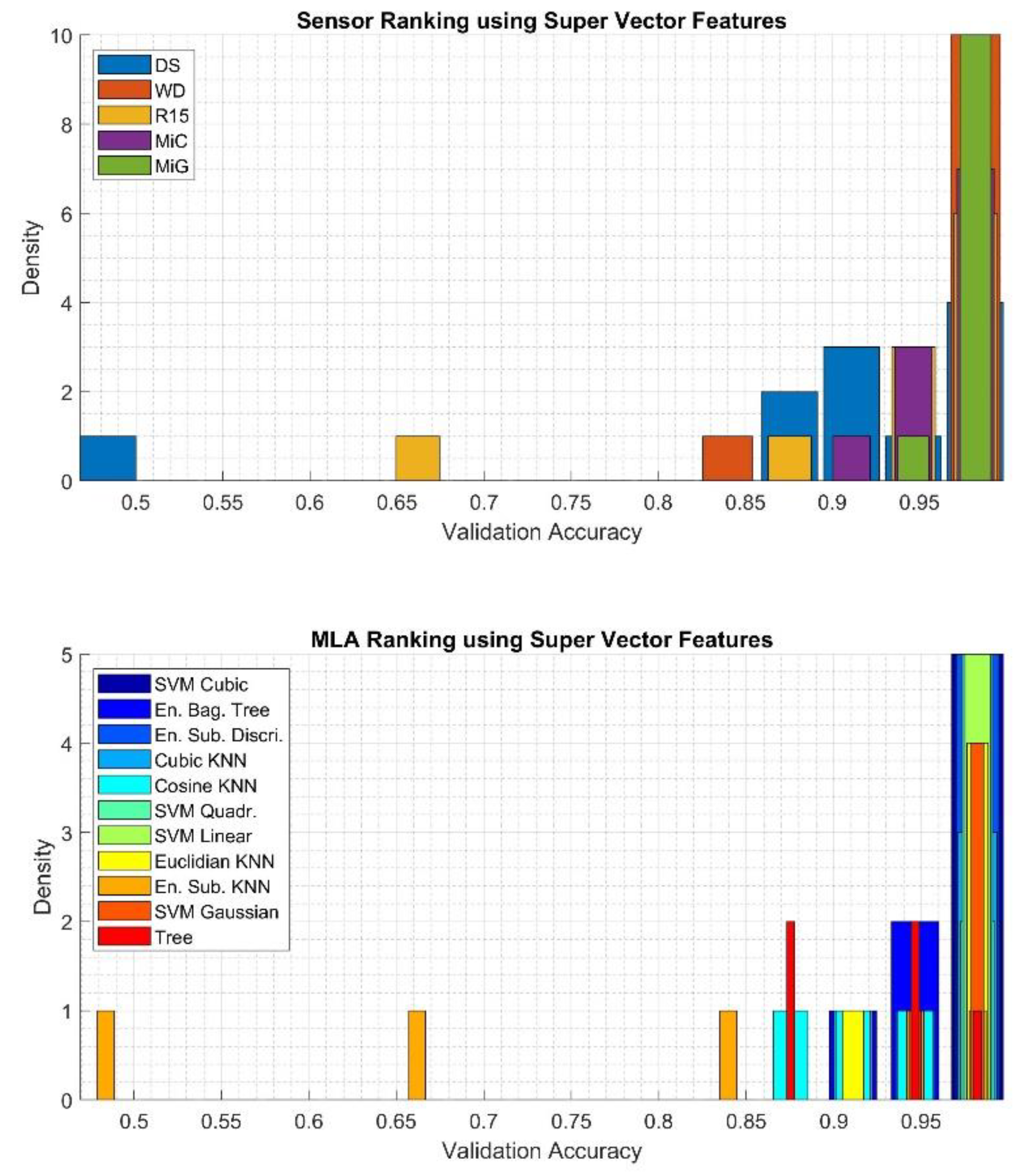
3.1. Analysis of the Influence of MLA Parameters on the Results Obtained for the Super Vector feature Set
- With a first degree polynomial (SVL), the highest efficiency is achieved for the smallest kernel scale. It then decreases with the increase of the scale size, but not for every type of signal. For signals recorded with DS and MiC sensors it drops rapidly, even below 0.6; for R15 to 0.9; and, for WD, the accuracy is the highest, regardless of the size of the analyzed parameter. In contrast, for MiG sensors, the value is initially smaller, then increases, so that, for values above 40, it falls again, but with values close to 0.9.
- This situation is different for the higher orders of the polynomial (SVQ, SVC) used and with the Gauss function-core (SVG). However, in these cases, the effectiveness is initially worse and increases for increasing kernel sizes.
- Efficacy is not dependent on the number of tree splits or from the number of learning cycles, especially for the ESK algorithm. However, significant differences in these values are visible depending on the type of sensor used.
- For Tree, EBT, and ESD the values are worse for the smallest value of the parameter and then increase and stabilize at a constant level.
- The worst results were obtained for the ESK algorithm and here also the biggest disproportions are visible for the signals recorded by individual sensors.
- For each type of applied kernel function, there is a negative impact on the level of effectiveness of the increase in the number of neighbors. Each time, the best results were obtained for the WD and the MiG sensors.
- The optimal kernel scale value for SVM algorithms was selected at level 10.
- The optimal value of tree splits for the decision tree algorithm was chosen at level 20.
- The optimal number of learning cycles for ensemble group algorithms was chosen at level 40.
- The optimal number of neighbors for KNN algorithms is chosen at level 1, which is the most precise.
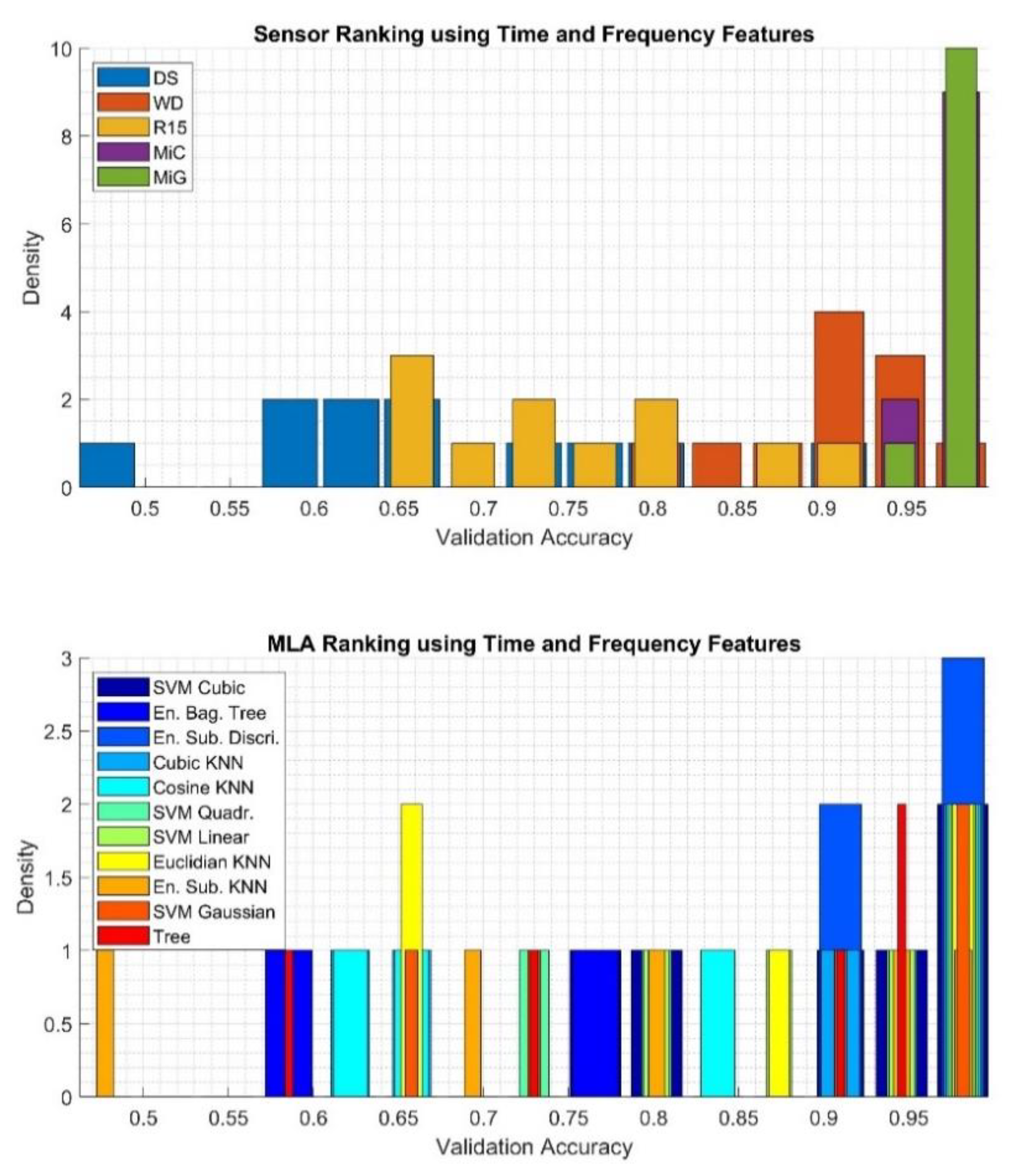
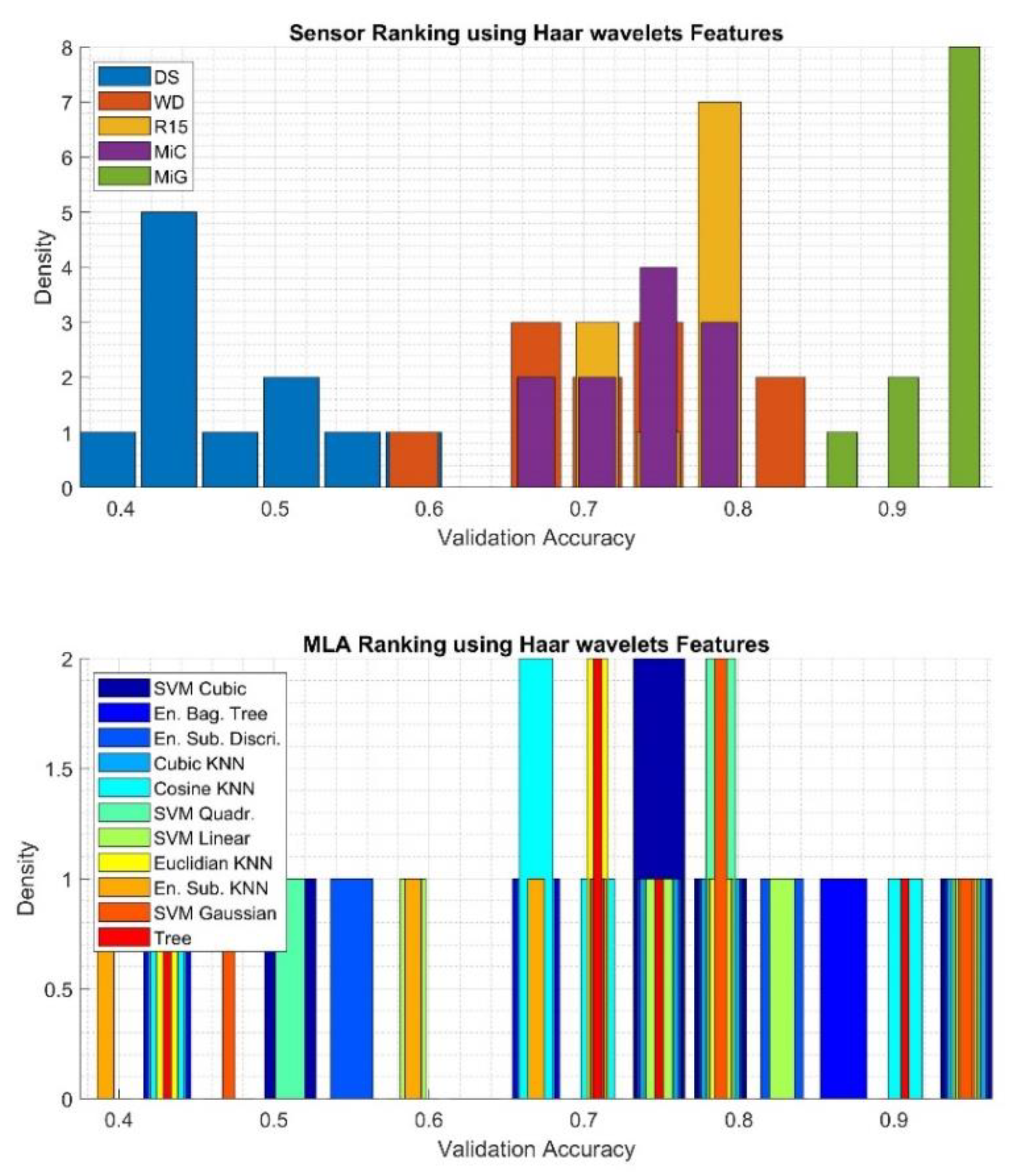
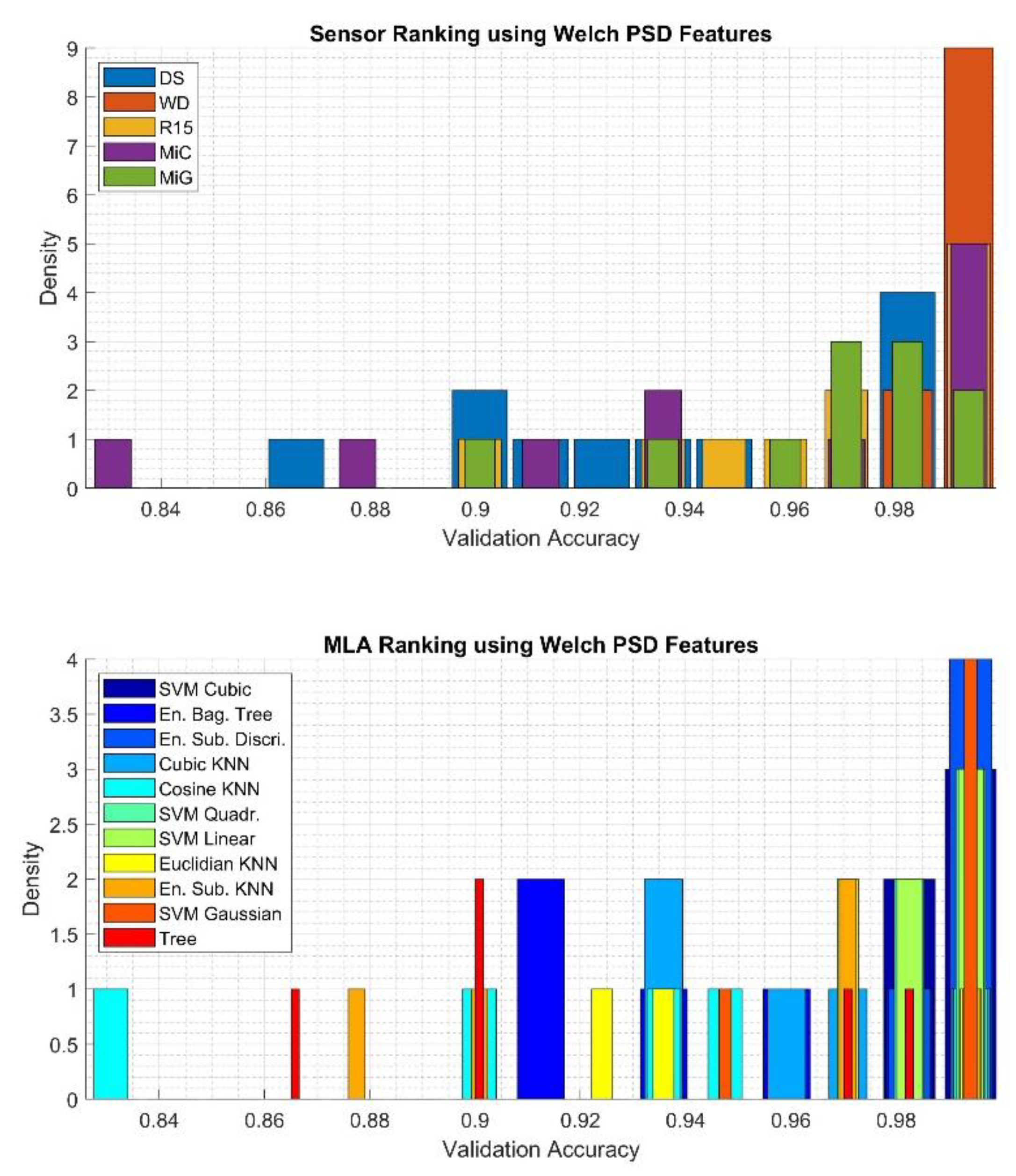
3.2. Discussion on the Optimal Sensor and MLA with Dependence from the Applied Feature Set
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, Y.Y.; Zhou, J.J.; Chen, W.J.; Du, L.; Chen, R.G.; Zhang, L.; Song, W.G. Study of an assessment method for the reliability of tap-changers in power transformer based on fault-tree analysis. In Proceedings of the 2008 International Conference on High Voltage Engineering and Application, ICHVE 2008, Chongqing, China, 9–12 November 2008; pp. 604–608. [Google Scholar] [CrossRef]
- Feizifar, B.; Usta, O. A new arc-based model and condition monitoring algorithm for on-load tap-changers. Electr. Power Syst. Res. 2019, 167, 58–70. [Google Scholar] [CrossRef] [Green Version]
- Jongen, R.; Gulski, E.; Siodla, K.; Parciak, J.; Erbrink, J. Diagnosis of degradation effects of on-load tap changer in power transformers. In Proceedings of the ICHVE 2014—2014 International Conference on High Voltage Engineering and Application, Poznan, Poland, 8–11 September 2014. [Google Scholar] [CrossRef]
- Jongen, R.; Seitz, P.P.; Smit, J.; Strehl, T.; Leich, R.; Gulski, E. On-load tap changer diagnosis with dynamic resistance measurements. In Proceedings of the Proceedings of 2012 IEEE International Conference on Condition Monitoring and Diagnosis, CMD 2012, Bali, Indonesia, 23–27 September 2012; pp. 485–488. [Google Scholar] [CrossRef]
- Duan, R.; Wang, F. Mechanical condition monitoring of on-load tap-changers using chaos theory & fuzzy C-means algorithm. In Proceedings of the IEEE Power and Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015. [Google Scholar] [CrossRef]
- Duan, R.; Wang, F. Fault Diagnosis of on-load tap-changer in converter transformer based on time-frequency vibration analysis. IEEE Trans. Ind. Electron. 2016, 63, 3815–3823. [Google Scholar] [CrossRef]
- Duan, R.; Zuo, Y.; Zheng, H.; Yao, R.; Deng, M.; Sun, Z. Condition monitoring of on-load tap-changers in converter transformers based on vibration method. In Proceedings of the 2nd IEEE Conference on Energy Internet and Energy System Integration, Beijing, China, 20–22 October 2018. [Google Scholar] [CrossRef]
- Secic, A.; Kuzle, I. On the novel approach to the on Load Tap Changer (OLTC) diagnostics based on the observation of fractal properties of recorded vibration fingerprints. In Proceedings of the 17th IEEE International Conference on Smart Technologies, Ohrid, Macedonia, 6–8 July 2017; pp. 720–725. [Google Scholar] [CrossRef]
- Osmanbasic, E.; Skelo, G. Tap changer condition assessment using dynamic resistance measurement. Procedia Eng. 2017, 202, 52–64. [Google Scholar] [CrossRef]
- Seo, J.; Ma, H.; Saha, T.K. A joint vibration and arcing measurement system for online condition monitoring of onload tap changer of the power transformer. IEEE Trans. Power Deliv. 2017, 32, 1031–1038. [Google Scholar] [CrossRef]
- Li, X. A brief review: Acoustic emission method for tool wear monitoring during turning. Int. J. Mach. Tools Manuf. 2002, 42, 157–165. [Google Scholar] [CrossRef] [Green Version]
- Hussain, A.; Lee, S.J.; Choi, M.S.; Brikci, F. An expert system for acoustic diagnosis of power circuit breakers and on-load tap changers. Expert Syst. Appl. 2015, 42, 9426–9433. [Google Scholar] [CrossRef]
- Yen, C.L.; Lu, M.C.; Chen, J.L. Applying the self-organization feature map (SOM) algorithm to AE-based tool wear monitoring in micro-cutting. Mech. Syst. Signal. Process. 2013, 34, 353–366. [Google Scholar] [CrossRef]
- Morette, N.; Ditchi, T.; Oussar, Y. Feature extraction and ageing state recognition using partial discharges in cables under HVDC. Electr. Power Syst. Res. 2020, 178, 6428–6438. [Google Scholar] [CrossRef]
- Morizet, N.; Godin, N.; Tang, J.; Maillet, E.; Fregonese, M.; Normand, B. Classification of acoustic emission signals using wavelets and Random Forests: Application to localized corrosion. Mech. Syst. Signal. Process. 2016, 70–71, 1026–1037. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, L. Hybrid feature selection using component co-occurrence based feature relevance measurement. Expert Syst. Appl. 2018, 102, 83–99. [Google Scholar] [CrossRef]
- Kane, P.V.; Andhare, A.B. Critical evaluation and comparison of psychoacoustics, acoustics and vibration features for gear fault correlation and classification. Meas. J. Int. Meas. Confed. 2020, 154, 107495. [Google Scholar] [CrossRef]
- Zhang, D.; Stewart, E.; Entezami, M.; Roberts, C.; Yu, D. Intelligent acoustic-based fault diagnosis of roller bearings using a deep graph convolutional network. Meas. J. Int. Meas. Confed. 2020, 156, 107585. [Google Scholar] [CrossRef]
- Chen, B.; Shen, B.; Chen, F.; Tian, H.; Xiao, W.; Zhang, F.; Zhao, C. Fault diagnosis method based on integration of RSSD and wavelet transform to rolling bearing. Meas. J. Int. Meas. Confed. 2019, 131, 400–411. [Google Scholar] [CrossRef]
- Kyprianou, A.; Lewin, P.L.; Efthimiou, V.; Stavrou, A.; Georghiou, G.E. Wavelet packet denoising for online partial discharge detection in cables and its application to experimental field results. Meas. Sci. Technol. 2006, 17, 2367–2379. [Google Scholar] [CrossRef] [Green Version]
- Sameh, W.; Gad, A.H.; Eldebeikey, S.M. An intelligent classifier of electrical discharges in oil immersed power transformers. In Proceedings of the 2019 21st International Middle East Power Systems Conference, Cairo, Egypt, 17–19 December 2019; pp. 866–871. [Google Scholar] [CrossRef]
- Meitei, S.N.; Borah, K.; Chatterjee, S. Modelling of acoustic wave propagation due to partial discharge and its detection and localization in an oil-filled distribution transformer. Frequenz 2020, 74, 73–81. [Google Scholar] [CrossRef]
- Ge, J.; Yin, G.; Wang, Y.; Xu, D.; Wei, F. Rolling-bearing fault-diagnosis method based on multimeasurement hybrid-feature evaluation. Information 2019, 10, 359. [Google Scholar] [CrossRef] [Green Version]
- Boczar, T.; Borucki, S. Time-frequency analysis of the AE signals generated by pds on bushing and stand-off insulators. Arch. Acoust. 2006, 31, 325–333. [Google Scholar]
- Cichoń, A.; Borucki, S.; Berger, P. Selecting sensor for on load tap changer contacts degree of wear diagnostics. Acta Phys. Pol. A 2013, 124, 395–398. [Google Scholar] [CrossRef]
- Gao, C.; Yu, L.; Xu, Y.; Wang, W.; Wang, S.; Wang, P. Partial discharge localization inside transformer windings via fiber-optic acoustic sensor array. IEEE Trans. Power Deliv. 2019, 34, 1251–1260. [Google Scholar] [CrossRef]
- Jiang, J.; Wang, K.; Wu, X.; Ma, G.; Zhang, C. Characteristics of the propagation of partial discharge ultrasonic signals on a transformer wall based on Sagnac interference. Plasma Sci. Technol. 2020, 22, 024002. [Google Scholar] [CrossRef]
- Khalid, K.N.; Rohani, M.N.K.H.; Ismail, B.; Isa, M.; Rosmi, A.S.; Wooi, C.L.; Yii, C.C. Influence of PD source and AE sensor distance towards arrival time of propagation wave in power transformer. In Proceedings of the First International Conference on Emerging Electrical Energy, Electronics and Computing Technologies, Melaka, Malaysia, 30–31 October 2019; Volume 1432, p. 012006. [Google Scholar] [CrossRef]
- MISTRAS Group. Product Brochure—WD Sensor. Available online: https://www.physicalacoustics.com/by-product/sensors/WD-100-900-kHz-Wideband-Differential-AE-Sensor (accessed on 29 May 2020).
- MISTRAS Group. Product Brochure—D9241A Sensor. Available online: https://pdf.directindustry.com/pdf/physical-acoustics/d9241a-sensor/27111-396871.html (accessed on 29 May 2020).
- MISTRAS Group. Product Brochure—R15 α Sensor. Available online: https://pdf.directindustry.com/pdf/physical-acoustics/r15-alpha/27111-396891.html (accessed on 29 May 2020).
- Brüel & Kjær. Product Brochure—Hydrophones—Types 8103, 8104, 8105 and 8106. Available online: https://www.bksv.com/-/media/literature/Product-Data/bp0317.ashx (accessed on 29 May 2020).
- Teledyne Reson. Product Brochure—Hydrophone TC4038. Available online: http://www.teledynemarine.com/reson-tc-4038?BrandID=17 (accessed on 29 May 2020).
- Boczar, T.; Cichoń, A. Comparative analysis of acoustic emission signals generated by electrical discharges measured by the hydrophone and the wideband contact transducer. J. Phys. IV Proc. France 2005, 129, 93–96. [Google Scholar] [CrossRef]
- Boczar, T.; Borucki, S.; Cichoń, A.; Lorenc, M. The influence of the propagation path length on the results of the time-frequency analysis of the acoustic emission generated by partial discharges in insulation oil. Int. J. Phys. IV Proc. France 2006, 137, 35–41. [Google Scholar] [CrossRef]
- Cichon, A.; Berger, P. Possibility of using acoustic emission method for testing load tap changers during normal operation of the transformer. In Proceedings of the ICHVE 2014—2014 International Conference on High Voltage Engineering and Application, Poznań, Poland, 8–11 September 2014. [Google Scholar] [CrossRef]
- Boczar, T.; Cichoń, A.; Borucki, S.; Szczyrba, T. Analysis of acoustic signals interfering diagnostic measurements of electric power transformer tap changers. Acta Phys. Pol. A 2013, 124, 387–390. [Google Scholar] [CrossRef]
- Xie, J.; Liu, Y.; Liu, L.; Tang, L.; Wang, G.; Li, X. A Partial discharge Signal Denoising Method Based on Adaptive Weighted Framing Fast Sparse Representation. Proc. Chin. Soc. Electr. Eng. 2019, 39, 6428–6438. [Google Scholar] [CrossRef]
- Kozioł, M.; Nagi, Ł.; Kunicki, M.; Urbaniec, I. Radiation in the optical and UHF range emitted by partial discharges. Energies 2019, 12, 4334. [Google Scholar] [CrossRef] [Green Version]
- Kunicki, M. Variability of the UHF signals generated by partial discharges in mineral oil. Sensors (Switzerland) 2019, 19, 1392. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nagi, L.; Kunicki, M. Ionizing radiation generated by the electrical discharges from medium and high voltage in the air. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Nagi, Ł.; Kozioł, M.; Zygarlicki, J. Optical radiation from an electric arc at different frequencies. Energies 2020, 13, 1676. [Google Scholar] [CrossRef] [Green Version]
- Cichon, A.; Fracz, P.; Zmarzly, D. Characteristic of acoustic signals generated by operation of on load tap changers. Acta Phys. Pol. A 2011, 120, 585–588. [Google Scholar] [CrossRef]
- Cichoń, A.; Borucki, S.; Boczar, T.; Zmarzły, D. The possibilities of using acoustic signals generated by the on load tap changer. In Proceedings of the 41st International Congress and Exposition on Noise Control Engineering 2012, New York, NY, USA, 19–22 August 2012. [Google Scholar]
- Cichon, A.; Borucki, T.; Boczar, T.; Zmarzly, D. Characteristic of acoustic emission signals generated by electric arc in on load tap changer. In Proceedings of the International Symposium on Electrical Insulating Materials, Kyoto, Japan, 6–10 September 2011. [Google Scholar] [CrossRef]
- Suzuki, H.; Kinjo, T.; Hayashi, Y.; Takemoto, M.; Ono, K.; Hayashi, Y. Wavelet transform of acoustic emission signals. J. Acoust. Emiss. 1996, 14, 69–84. [Google Scholar]
- Sause, M.G.R. Situ Monitoring of Fiber-Reinforced Composites Theory, Basic Concepts, Methods, and Applications; Springer Series in Materials Science; Springer: New York, NY, USA, 2016. [Google Scholar]
- Karandaeva, O.I.; Yakimov, I.A.; Filimonova, A.A.; Gartlib, E.A.; Yachikov, I.M. Stating diagnosis of current state of electric furnace transformer on the basis of analysis of partial discharges. Machines 2019, 7, 77. [Google Scholar] [CrossRef] [Green Version]
- Zheng, K.; Wang, X. Feature selection method with joint maximal information entropy between features and class. Pattern Recognit. 2018, 77, 20–29. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class no | Number of Samples Used for Each Sensor | ||||
|---|---|---|---|---|---|
| DS | WD | R15 | MiC | MiG | |
| C1 | 29 | 29 | 29 | 15 | 15 |
| C2 | 30 | 30 | 30 | 27 | 27 |
| C3 | 30 | 30 | 29 | 19 | 19 |
| C4 | 30 | 30 | 30 | 30 | 30 |
| C5 | 29 | 30 | 30 | 29 | 29 |
| Measure Name | Super Vector F. | Welch PSD F. | Haar Wavelet F. | Time–Frequency F. |
|---|---|---|---|---|
| Best Value of the Measure, MLA, Sensor | ||||
| Accuracy Sensitivity | 1, ESD, WD 1, ESD, WD | 1, ESD, WD 1, ESD, WD | 0.958, SVL, MiG | 0.991, ESD, MiC |
| 0.961, SVL, MiG | 0.993, ESD, MiC | |||
| Specificity | 1, ESD, WD | 1, ESD, WD | 0.989, SVL, MiG | 0.998, ESD, MiC |
| Precision | 1, ESD, WD | 1, ESD, WD | 0.957, SVL, MiG | 0.993, SVL, MiC |
| F1 score | 1, ESD, WD | 1, ESD, WD | 0.958, SVL, MiG | 0.992, SVL, MiC |
| Matthews CC | 1, ESD, WD | 1, ESD, WD | 0.948, SVL, MiG | 0.990, SVL, MiC |
| Worst value of the measure, MLA, Sensor | ||||
| Accuracy | 0.201, SVG, WD | 0.203, SVG, WD | 0.202, SVG, DS | 0.201, SVG, WD |
| Sensitivity | 0.200, SVG, DS | 0.200, SVG, DS | 0.200, SVG, DS | 0.200, SVG, DS |
| Specificity | 0.800, SVG, DS | 0.800, SVG, DS | 0.800, SVG, DS | 0.800, SVG, DS |
| Precision | 0.286, SVQ, WD | 0.298, SVQ, DS | 0.258, EBT, DS | 0.359, SVC, DS |
| F1 score | 0.252, SVQ, DS | 0.286, SVQ, DS | 0.254, EBT, DS | 0.270, SVC, R15 |
| Matthews CC | 0.109, SVQ, DS | 0.135, SVQ, DS | 0.089, EBT, DS | 0.162, SVC, DS |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wotzka, D.; Cichoń, A. Study on the Influence of Measuring AE Sensor Type on the Effectiveness of OLTC Defect Classification. Sensors 2020, 20, 3095. https://doi.org/10.3390/s20113095
Wotzka D, Cichoń A. Study on the Influence of Measuring AE Sensor Type on the Effectiveness of OLTC Defect Classification. Sensors. 2020; 20(11):3095. https://doi.org/10.3390/s20113095
Chicago/Turabian StyleWotzka, Daria, and Andrzej Cichoń. 2020. "Study on the Influence of Measuring AE Sensor Type on the Effectiveness of OLTC Defect Classification" Sensors 20, no. 11: 3095. https://doi.org/10.3390/s20113095
APA StyleWotzka, D., & Cichoń, A. (2020). Study on the Influence of Measuring AE Sensor Type on the Effectiveness of OLTC Defect Classification. Sensors, 20(11), 3095. https://doi.org/10.3390/s20113095