Angular Light, Polarization and Stokes Parameters Information in a Hybrid Image Sensor with Division of Focal Plane

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
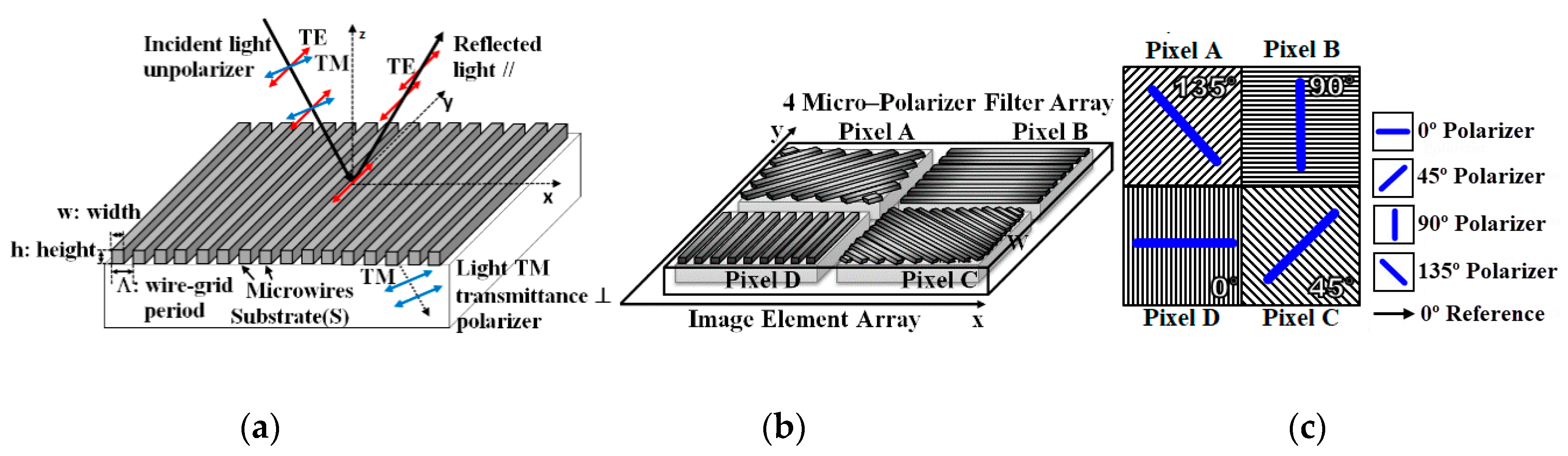
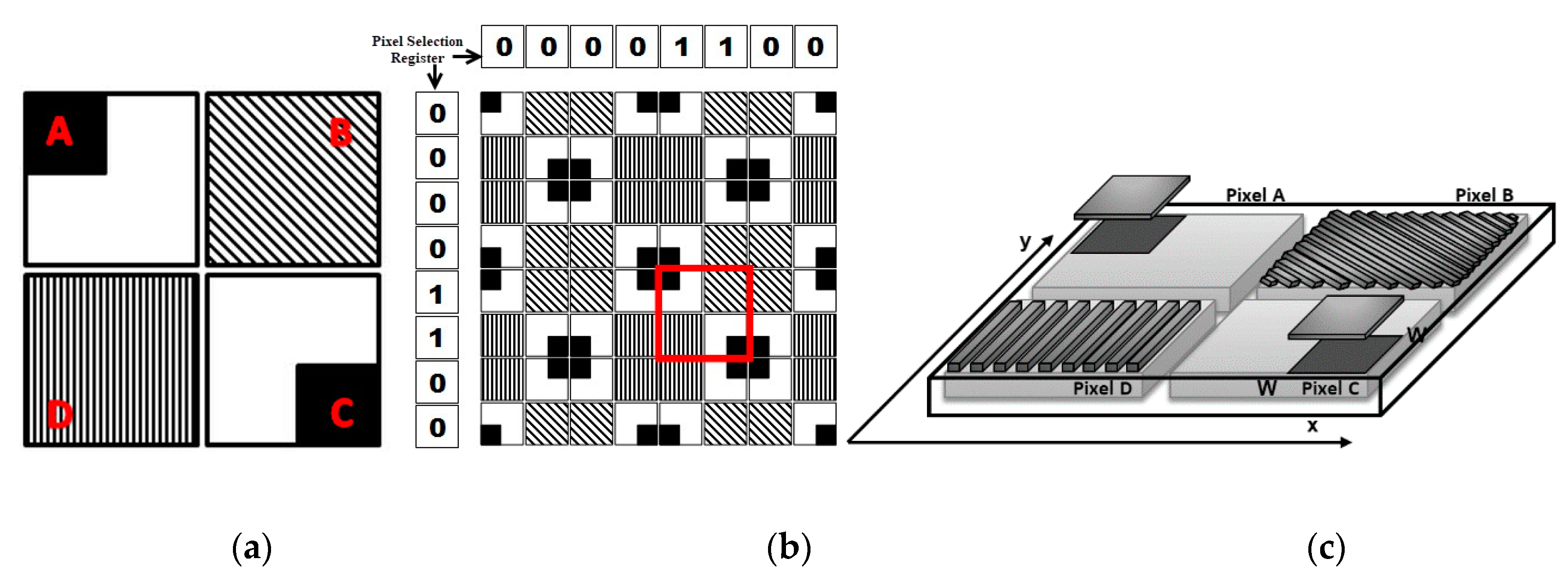
2.1. Operating Principles of Micropolarizer Array-Based Polarization Sensors
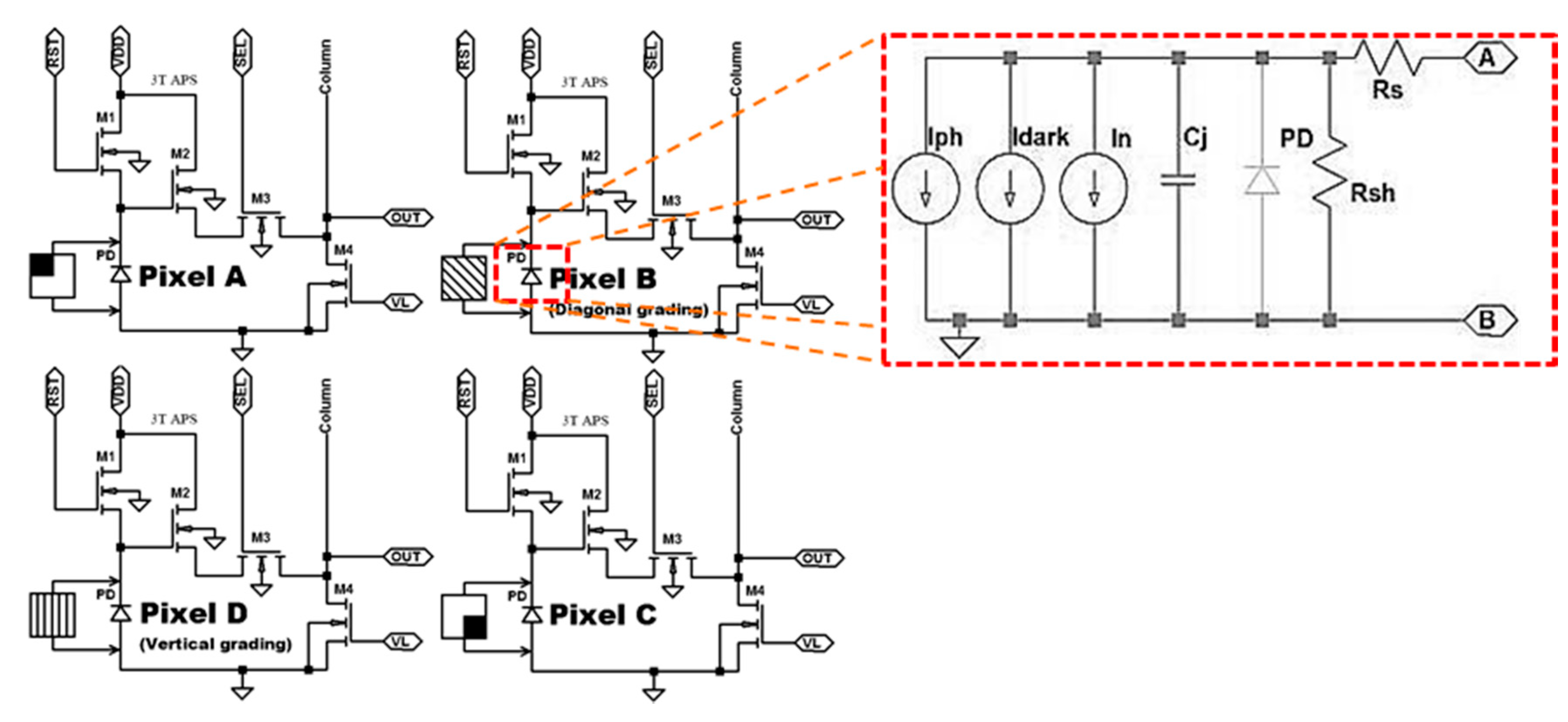
2.2. Photodiode Model
2.3. Polarization Pixel Cluster
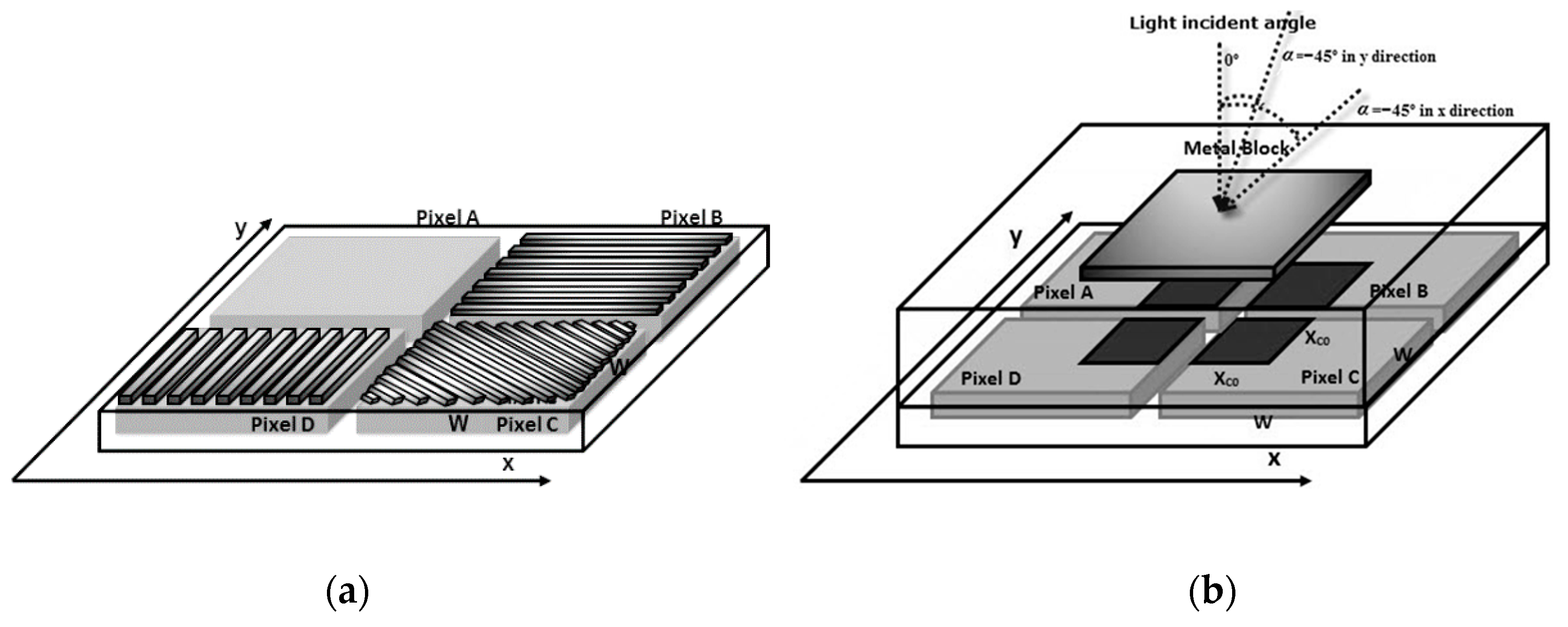
2.4. Quadrature Pixel Cluster
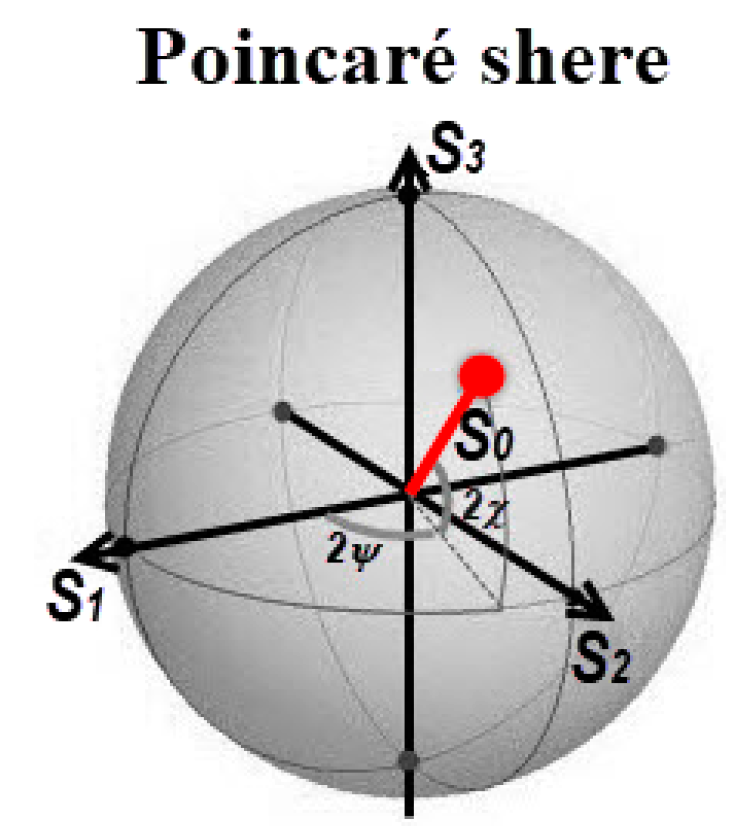
2.5. Stokes Parameters and Degree of Polarization
2.6. The Hybrid Pixel Cluster Proposed
3. Results and Discussion
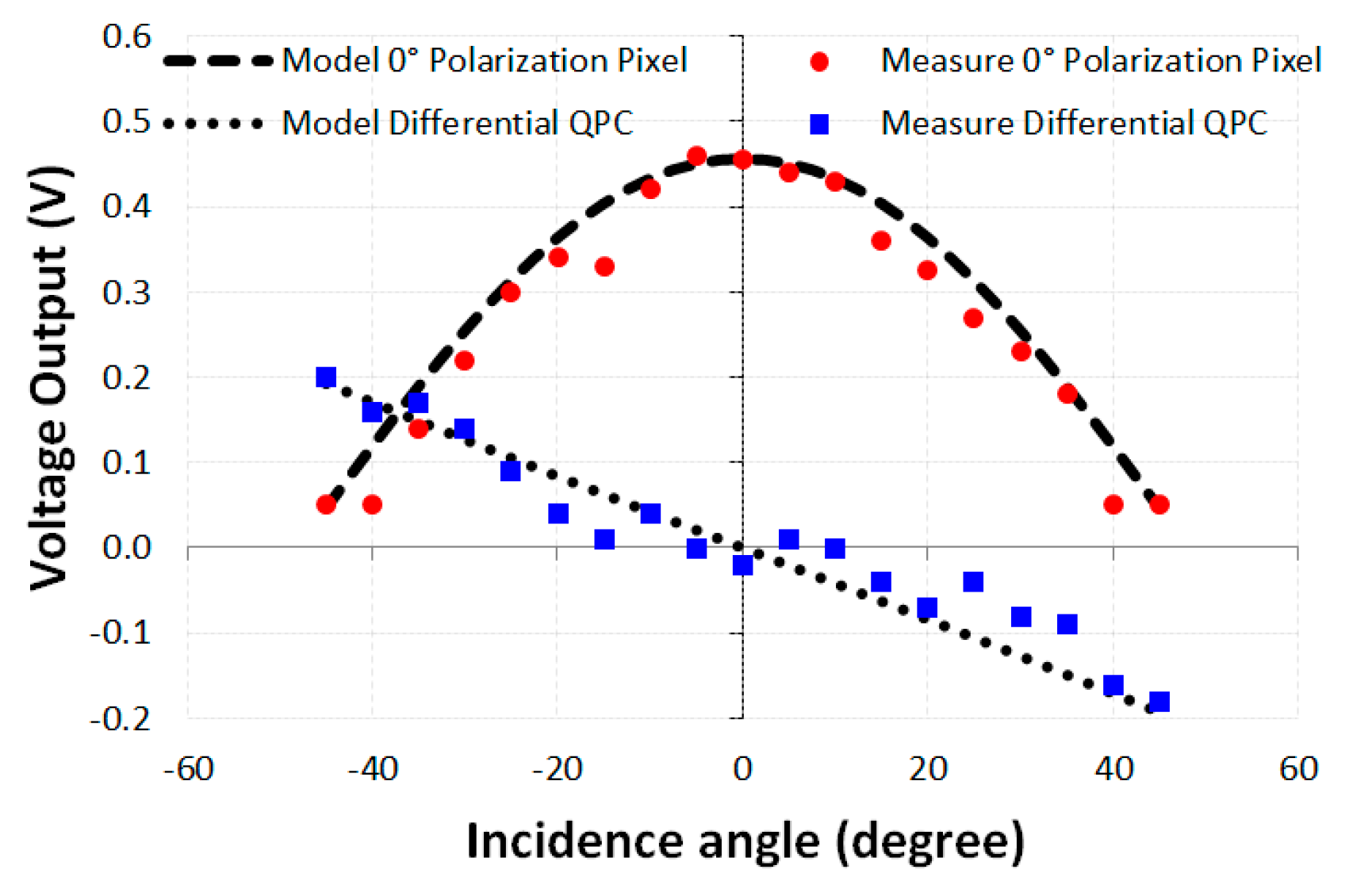
3.1. Circuit Simulation Data
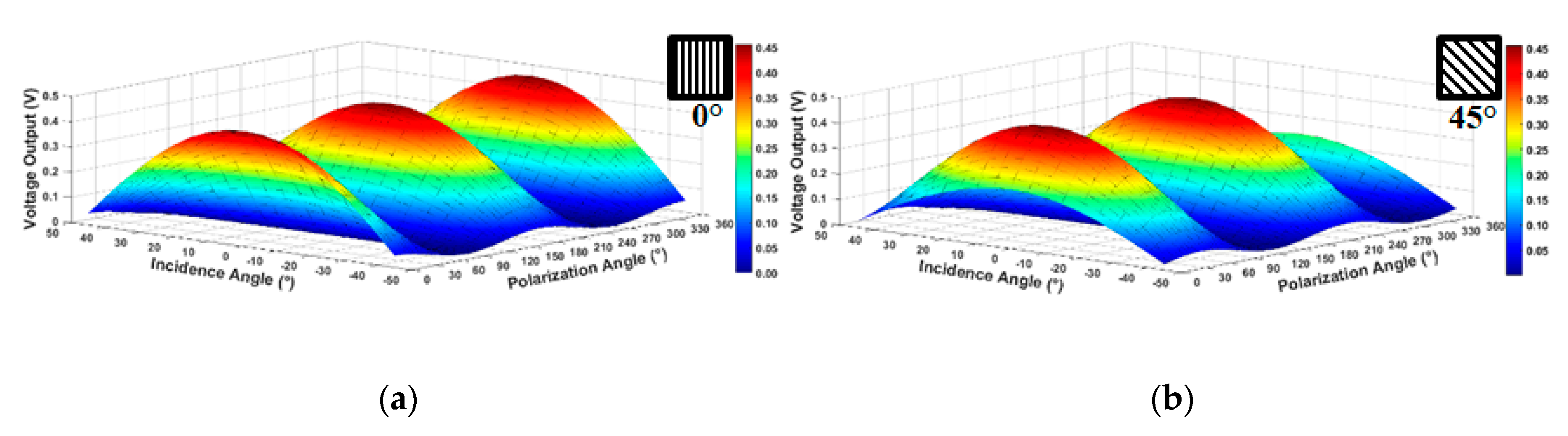
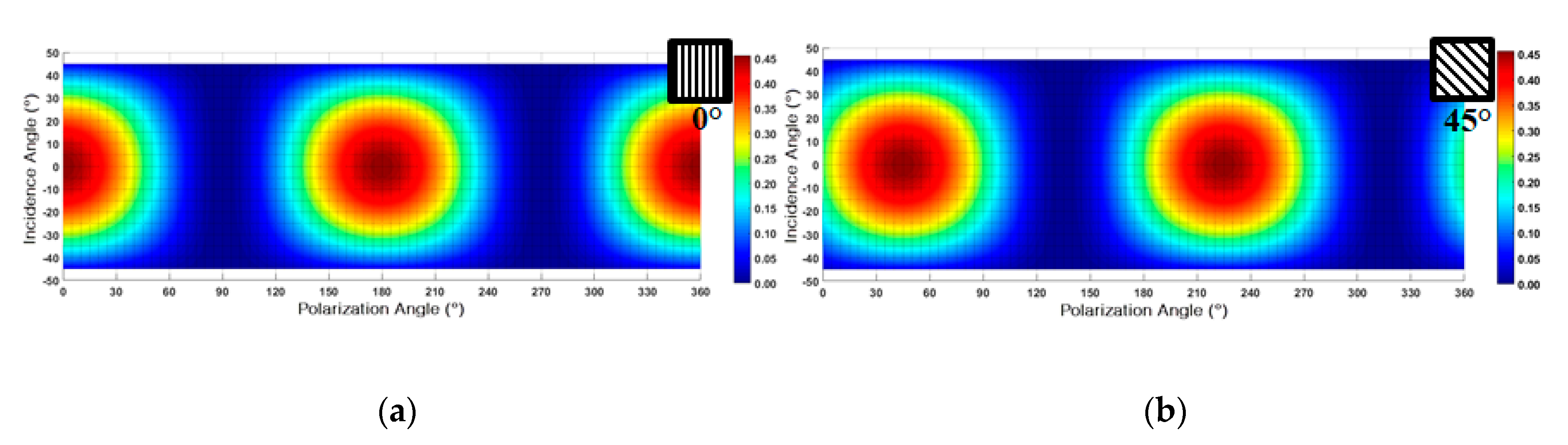
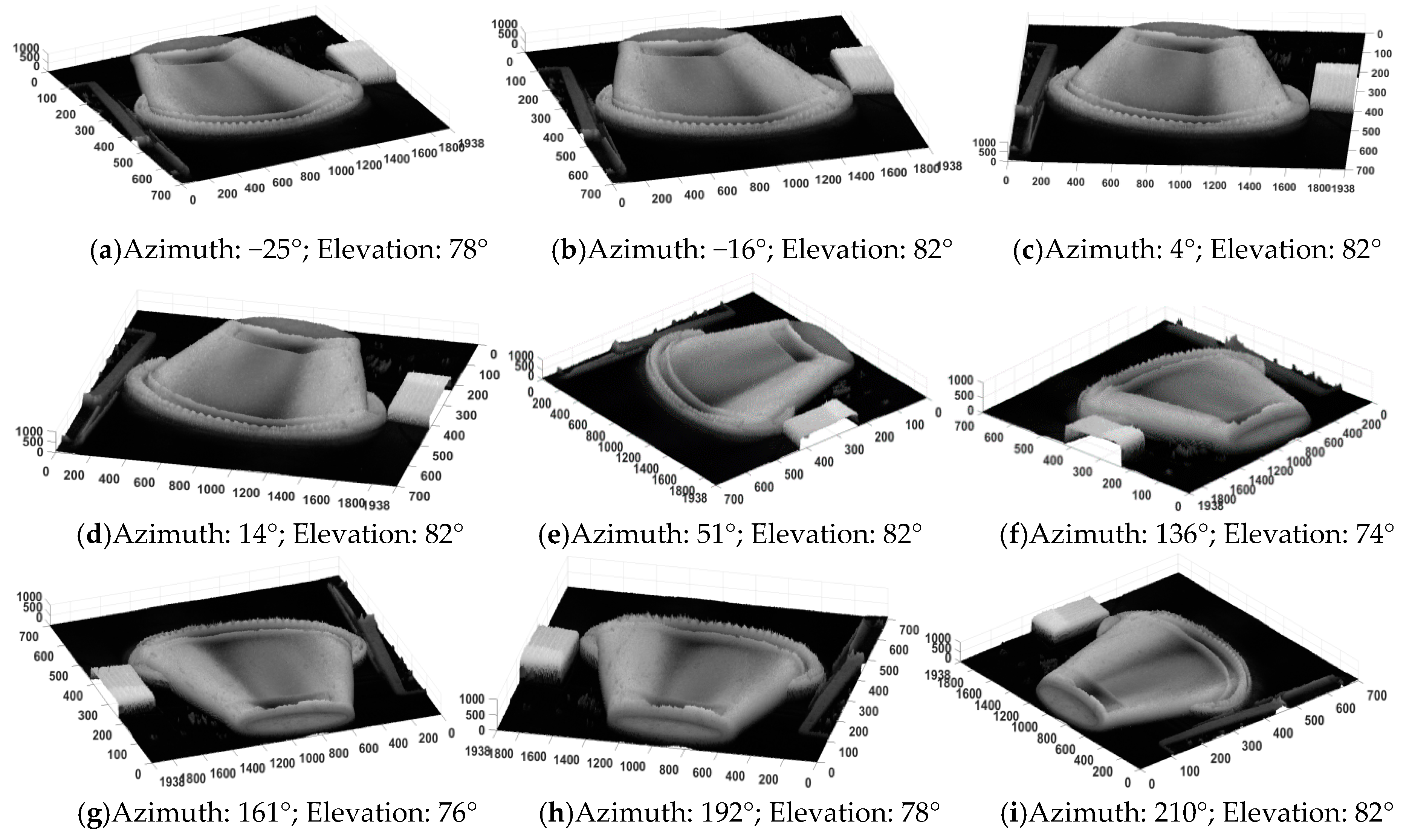
3.2. 3D Simulation Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

| Parameter | Value |
|---|---|
| Technology | 0.18 µm standard TSMC CMOS process |
| Pixel size (A) | 5 µm × 5 µm |
| Pixel type | Photodiode 3T APS |
| Width/Length of the CMOS Transistors: W1/L1, W2/L2, W3/L3, W4/L4 | 0.4/0.2, 5/0.2, 5/0.2, 0.4/0.2 µm |
| Fill Factor | 40% |
| Capacitance of the photodiode junction (Cj) | 20 fF |
| Dark Current | 0.1 fA |
| Supply Voltage | 1.8 V |
| Height of the metal M (Timε) | 6.360 µm |
| Thickness of the metal M (Tm) | 1.720 µm |
| Refractive index of air (nair) | 1 |
| Refractive index of SiO2 (nε) | 1.46 |
| Widths of the shaded regions of diodes under normal illumination (XA0, XB0, XC0, XD0) | 2.3 µm |
| Light intensity | 500 klux = 732 W/m2 [λ = 555 nm] |
References
- Sarkar, M.; Bello, D.; Hoof, C.; Theuwissen, A. Integrated Polarization Analyzing CMOS Image Sensor for Material Classification. IEEE Sens. J. 2011, 11, 1692–1703. [Google Scholar] [CrossRef]
- Sarhangnejad, N.; Katic, N.; Xia, Z.; Wei, M.; Gusev, N.; Dutta, G.; Gulve, R.; Li, P.Z.X.; Ke, H.F.; Haim, H. Dual-Tap Computational Photography Image Sensor with Per-Pixel Pipelined Digital Memory for Intra-Frame Coded Multi-Exposure. IEEE J. Solid-State Circuits 2019, 54, 3191–3202. [Google Scholar] [CrossRef]
- Hu, F.; Cheng, Y.; Gui, L.; Wu, L.; Zhang, X.; Peng, X.; Su, J. Polarization-based material classification technique using passive millimeter-wave polarimetric imagery. Appl. Opt. 2016, 55, 8690–8697. [Google Scholar] [CrossRef] [PubMed]
- Karman, S.B.; Diah, S.Z.M.; Gebeshuber, I.C. Bio-inspired polarized skylight-based navigation sensors: A review. Sensors 2012, 12, 14232–14261. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sarkar, M.; Bello, D.S.S.; Van Hoof, C.; Theuwissen, A.J. Integrated polarization-analyzing CMOS image sensor for detecting the incoming light ray direction. IEEE Trans. Instrum. Meas. 2011, 60, 2759–2767. [Google Scholar] [CrossRef]
- Dung, L.-R.; Wu, Y.-Y. A wireless narrowband imaging chip for capsule endoscope. IEEE Trans. Biomed. Circuits Syst. 2010, 4, 462–468. [Google Scholar] [CrossRef] [PubMed]
- Faramarzpour, N.; Munir, E.-D.; Deen, M.J.; Fang, Q.; Liu, L. CMOS imaging for biomedical applications. IEEE Potentials 2008, 27, 31–36. [Google Scholar] [CrossRef]
- Parikh, S.; Gulak, G.; Chow, P. A CMOS image sensor for DNA microarrays. In Proceedings of the 2007 IEEE Custom Integrated Circuits Conference, San Jose, CA, USA, 16–19 September 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 821–824. [Google Scholar]
- Zhang, M.; Ihida-Stansbury, K.; Van der Spiegel, J.; Engheta, N. Polarization-based non-staining cell detection. Opt. Express 2012, 20, 25378–25390. [Google Scholar] [CrossRef] [PubMed]
- Schechner, Y.Y.; Narasimhan, S.G.; Nayar, S.K. Instant dehazing of images using polarization. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. CVPR 2001, Kauai, HI, USA, 8–14 December 2001; IEEE: Piscataway, NJ, USA, 2001; pp. 325–332. [Google Scholar]
- Dias, R.; Correia, J.; Minas, G. CMOS optical sensors for being incorporated in endoscopic capsule for cancer cells detection. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 2747–2751. [Google Scholar]
- Song, H.; Kono, H.; Seo, Y.; Azhari, A.; Somei, J.; Suematsu, E.; Watarai, Y.; Ota, T.; Watanabe, H.; Hiramatsu, Y. A radar-based breast cancer detection system using CMOS integrated circuits. IEEE Access 2015, 3, 2111–2121. [Google Scholar] [CrossRef]
- Sansoni, G.; Trebeschi, M.; Docchio, F. State-of-the-art and applications of 3D imaging sensors in industry, cultural heritage, medicine, and criminal investigation. Sensors 2009, 9, 568–601. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Cao, Y.; Shi, G.; Cai, X.; Chen, Y.; Wang, S.; Yan, S. An overlapping-free leaf segmentation method for plant point clouds. IEEE Access 2019, 7, 129054–129070. [Google Scholar] [CrossRef]
- Eriksson, J.; Bergström, D.; Renhorn, I. Characterization and performance of a LWIR polarimetric imager. In Proceedings of the Electro-Optical Remote Sensing XI, Warsaw, Poland, 5 October 2017; International Society for Optics and Photonics: Bellingham, WA, USA; p. 1043407. [Google Scholar]
- Gurton, K.P.; Yuffa, A.J.; Videen, G.W. Enhanced facial recognition for thermal imagery using polarimetric imaging. Opt. Lett. 2014, 39, 3857–3859. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yuffa, A.J.; Gurton, K.P.; Videen, G. Three-dimensional facial recognition using passive long-wavelength infrared polarimetric imaging. Appl. Opt. 2014, 53, 8514–8521. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Iranmanesh, S.M.; Dabouei, A.; Kazemi, H.; Nasrabadi, N.M. Deep cross polarimetric thermal-to-visible face recognition. In Proceedings of the 2018 International Conference on Biometrics (ICB), Gold Coast, QLD, Australia, 20–23 February 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 166–173. [Google Scholar]
- Kim, S.-J.; Han, S.-W.; Kang, B.; Lee, K.; Kim, J.D.; Kim, C.-Y. A three-dimensional time-of-flight CMOS image sensor with pinned-photodiode pixel structure. IEEE Electron Device Lett. 2010, 31, 1272–1274. [Google Scholar] [CrossRef]
- Kato, Y.; Sano, T.; Moriyama, Y.; Maeda, S.; Yamazaki, T.; Nose, A.; Shina, K.; Yasu, Y.; van der Tempel, W.; Ercan, A. 320× 240 Back-illuminated 10μm CAPD pixels for high speed modulation Time-of-Flight CMOS image sensor. Kyoto, Japan, 5–8 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. C288–C289. [Google Scholar]
- Fife, K.; El Gamal, A.; Wong, H.-S.P. A 3MPixel multi-aperture image sensor with 0.7 μm pixels in 0.11 μm CMOS. In Proceedings of the 2008 IEEE International Solid-State Circuits Conference-Digest of Technical Papers, San Francisco, CA, USA, 3–7 February 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 48–594. [Google Scholar]
- Lumsdaine, A.; Georgiev, T. The focused plenoptic camera. In Proceedings of the 2009 IEEE International Conference on Computational Photography (ICCP), San Francisco, CA, USA, 16–17 April 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–8. [Google Scholar]
- Mochizuki, F.; Kagawa, K.; Okihara, S.; Seo, M.-W.; Zhang, B.; Takasawa, T.; Yasutomi, K.; Kawahito, S. Single-event transient imaging with an ultra-high-speed temporally compressive multi-aperture CMOS image sensor. Opt. Express 2016, 24, 4155–4176. [Google Scholar] [CrossRef] [PubMed]
- Wang, A.; Molnar, A. A light-field image sensor in 180 nm CMOS. IEEE J. Solid-State Circuits 2011, 47, 257–271. [Google Scholar] [CrossRef]
- Varghese, V.; Qian, X.; Chen, S.; ZeXiang, S.; Jin, T.; Guozhen, L.; Wang, Q.J. Track-and-tune light field image sensor. IEEE Sens. J. 2014, 14, 4372–4384. [Google Scholar] [CrossRef]
- Varghese, V.; Qian, X.; Chen, S.; ZeXiang, S. Linear angle sensitive pixels for 4D light field capture. In Proceedings of the 2013 International SoC Design Conference (ISOCC), Busan, Korea, 17–19 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 072–075. [Google Scholar]
- Morel, O.; Seulin, R.; Fofi, D. Handy method to calibrate division-of-amplitude polarimeters for the first three Stokes parameters. Opt. Express 2016, 24, 13634–13646. [Google Scholar] [CrossRef]
- Perkins, R.; Gruev, V. Signal-to-noise analysis of Stokes parameters in division of focal plane polarimeters. Opt. Express 2010, 18, 25815–25824. [Google Scholar] [CrossRef] [PubMed]
- Garcia, M.; Gao, S.; Edmiston, C.; York, T.; Gruev, V. A 1300× 800, 700 mW, 30 fps spectral polarization imager. In Proceedings of the 2015 IEEE International Symposium on Circuits and Systems (ISCAS), Lisbon, Portugal, 24–27 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1106–1109. [Google Scholar]
- Zhang, J.; Luo, H.; Liang, R.; Ahmed, A.; Zhang, X.; Hui, B.; Chang, Z. Sparse representation-based demosaicing method for microgrid polarimeter imagery. Opt. Lett. 2018, 43, 3265–3268. [Google Scholar] [CrossRef] [PubMed]
- Varghese, V.; Chen, S. Polarization-based angle sensitive pixels for light field image sensors with high spatio-angular resolution. IEEE Sens. J. 2016, 16, 5183–5194. [Google Scholar] [CrossRef]
- Varghese, V.; Chen, S. Angle sensitive imaging: A new paradigm for light field imaging. Ph.D. Dissertation, Nanyang Technological University, Singapore, 2016. [Google Scholar]
- Hecht, E. Optics; Addison Wesley: San Francisco, CA, USA, 2002; Volume 4. [Google Scholar]
- Varghese, V.; Chen, S. Incident light angle detection technique using polarization pixels. In Proceedings of the SENSORS, Valencia, Spain, 2–5 November 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2167–2170. [Google Scholar]
- Carvalho, F.F.; Souza, A.K.P.; de Moraes Cruz, C.A. A novel hybrid polarization-quadrature pixel cluster for local light angle and intensity detection. In Proceedings of the 30th Symposium on Integrated Circuits and Systems Design Chip on the Sands (SBCCI ’17), Fortaleza, Brazil, 28 August–1 September 2017. [Google Scholar]
- Carvalho, F.F.; Souza, A.K.P.; Cruz, C.A.d.M. Hybrid grated pixel cluster for local light angle and intensity detection. In Proceedings of the 2017 2nd International Symposium on Instrumentation Systems, Circuits and Transducers (INSCIT), Fortaleza, Brazil, 28 August–1 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Carvalho, F.F.; de Moraes Cruz, C.A.; Marques, G.C.; Bezerra, T.B. A Novel Hybrid CMOS Pixel-Cluster for Local Light Angle, Polarization and Intensity Detection with Determination of Stokes Parameters. J. Integr. Circuits Syst. 2018, 13, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, M. Óptica e fotónica; Lidel: Lisboa, Portugal, 2003; ISBN 972-757-288-X. [Google Scholar]
- Yu, X.; Kwok, H.S. Optical wire-grid polarizers at oblique angles of incidence. J. Appl. Phys. 2003, 93, 4407–4412. [Google Scholar] [CrossRef] [Green Version]
- De Moraes Cruz, C.A. Simplified Wide Dynamic Range CMOS Image Sensor with 3T APS Reset-Drain Actuation. Ph.D. Dissertation, Universidade Federal de Minas Gerais, Belo Horizonte, Brazil, 2014. [Google Scholar]
- Goldstein, D.H. Polarized Light; CRC Press: Boca Raton, FL, USA, 2017; ISBN 1-351-83367-7. [Google Scholar]
- Sarkar, M.; Theuwissen, A. A Biologically Inspired CMOS Image Sensor; Springer: Berlin, Germany, 2012; ISBN 3-642-34901-3. [Google Scholar]
- Gruev, V.; Spiegel, J.; Engheta, N. Integrated polarization image sensor for cell detection. In Proceedings of the International Image Sensor Workshop, Bergen, Norway, 26–28 June 2009. [Google Scholar]
- Guo, J.; Brady, D. Fabrication of thin-film micropolarizer arrays for visible imaging polarimetry. Appl. Opt. 2000, 39, 1486–1492. [Google Scholar] [CrossRef] [PubMed]
- Yang, R.; Sen, P.; O’connor, B.; Kudenov, M. Intrinsic coincident full-Stokes polarimeter using stacked organic photovoltaics. Appl. Opt. 2017, 56, 1768–1774. [Google Scholar] [CrossRef] [PubMed]
- Gruev, V.; York, T. High resolution CCD polarization imaging sensor. In Proceedings of the International Image Sensor Workshop, Sapporo, Japan, 8–11 June 2011. [Google Scholar]
- Garcia, N.M.; De Erausquin, I.; Edmiston, C.; Gruev, V. Surface normal reconstruction using circularly polarized light. Opt. Express 2015, 23, 14391–14406. [Google Scholar] [CrossRef] [PubMed]
- Kruse, A.W.; Alenin, A.S.; Tyo, J.S. Review of visualization methods for passive polarization imaging. Opt. Eng. 2019, 58, 082414. [Google Scholar] [CrossRef] [Green Version]
- Zhanghao, K.; Chen, X.; Liu, W.; Li, M.; Liu, Y.; Wang, Y.; Luo, S.; Wang, X.; Shan, C.; Xie, H. Super-resolution imaging of fluorescent dipoles via polarized structured illumination microscopy. Nat. Commun. 2019, 10, 1–10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cronin, T.W.; Garcia, M.; Gruev, V. Multichannel spectrometers in animals. Bioinspir. Biomim. 2018, 13, 021001. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Freitas Carvalho, F.; Augusto de Moraes Cruz, C.; Costa Marques, G.; Martins Cruz Damasceno, K. Angular Light, Polarization and Stokes Parameters Information in a Hybrid Image Sensor with Division of Focal Plane. Sensors 2020, 20, 3391. https://doi.org/10.3390/s20123391
Freitas Carvalho F, Augusto de Moraes Cruz C, Costa Marques G, Martins Cruz Damasceno K. Angular Light, Polarization and Stokes Parameters Information in a Hybrid Image Sensor with Division of Focal Plane. Sensors. 2020; 20(12):3391. https://doi.org/10.3390/s20123391
Chicago/Turabian StyleFreitas Carvalho, Francelino, Carlos Augusto de Moraes Cruz, Greicy Costa Marques, and Kayque Martins Cruz Damasceno. 2020. "Angular Light, Polarization and Stokes Parameters Information in a Hybrid Image Sensor with Division of Focal Plane" Sensors 20, no. 12: 3391. https://doi.org/10.3390/s20123391
APA StyleFreitas Carvalho, F., Augusto de Moraes Cruz, C., Costa Marques, G., & Martins Cruz Damasceno, K. (2020). Angular Light, Polarization and Stokes Parameters Information in a Hybrid Image Sensor with Division of Focal Plane. Sensors, 20(12), 3391. https://doi.org/10.3390/s20123391