Optimal Use of Titanium Dioxide Colourant to Enable Water Surfaces to Be Measured by Kinect Sensors



Abstract
:1. Introduction
2. Sensor Accuracy and Minimum Colourant Concentration
2.1. Kinect Sensors
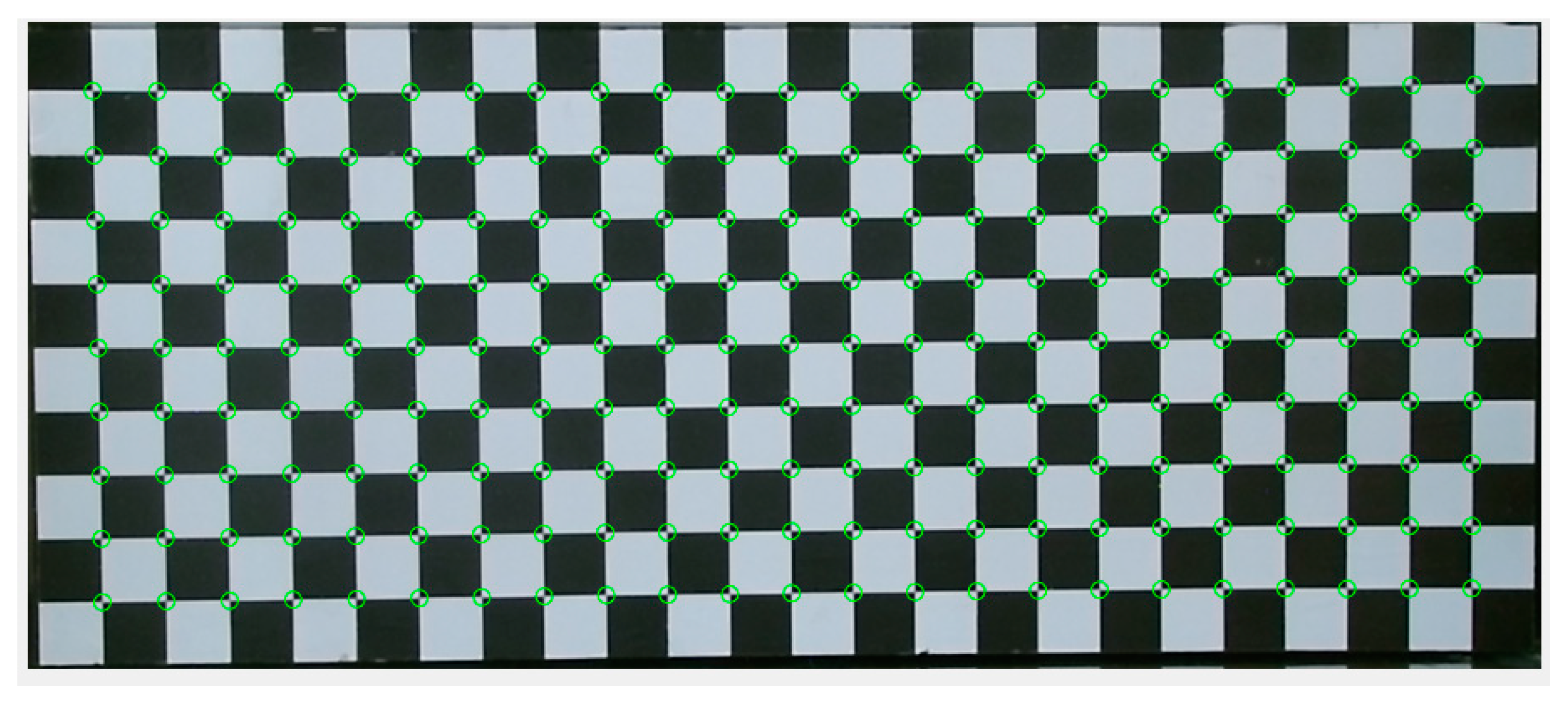
2.2. Kinect Data Calibration
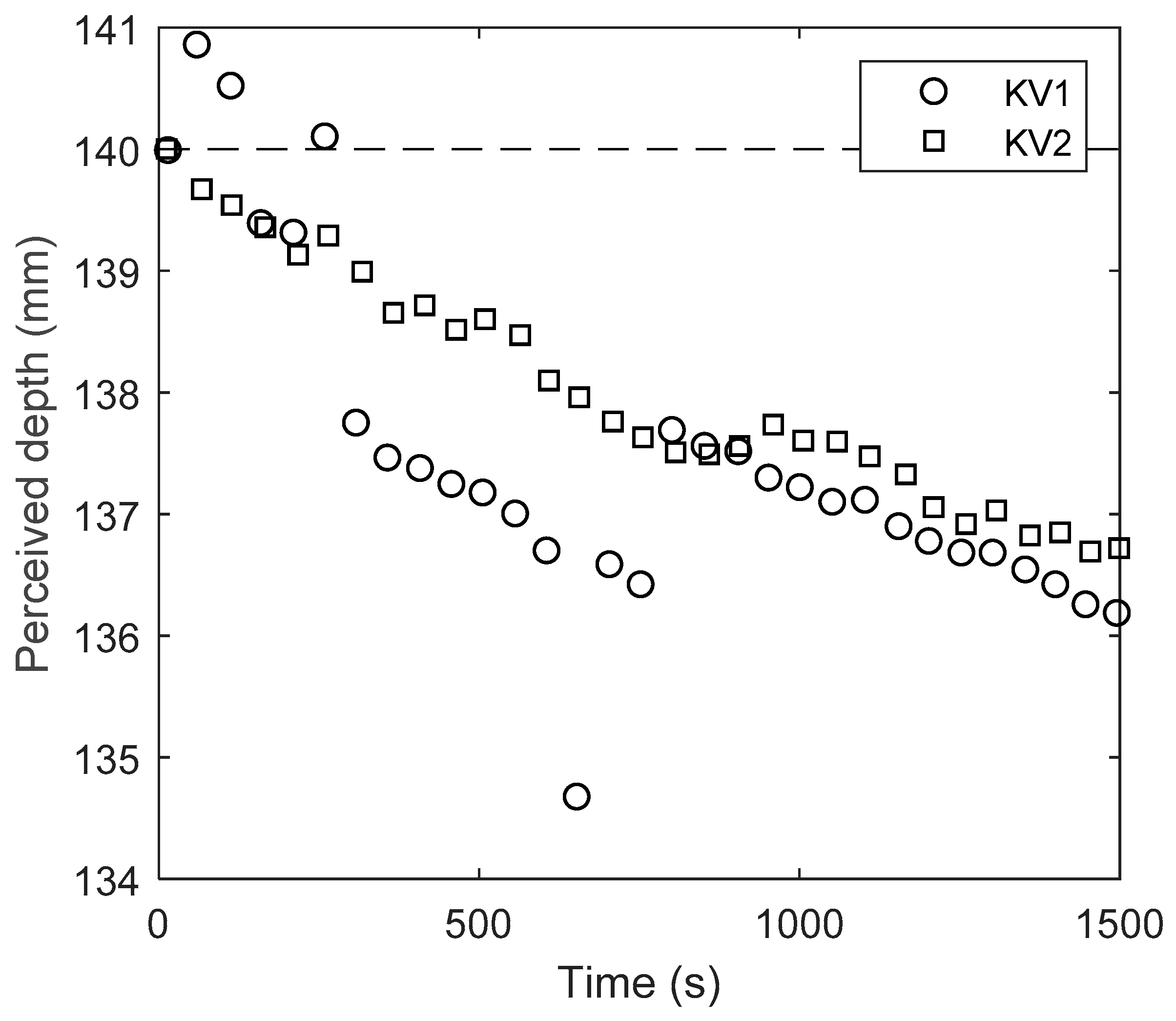
2.3. Accuracy of KV1 vs. KV2—Stationary Surface Measurement Accuracy and How to Improve It
2.4. TiO2 Concentration and Still-Water Stability Tests
3. Effect of TiO2 Concentration on Fluid Properties
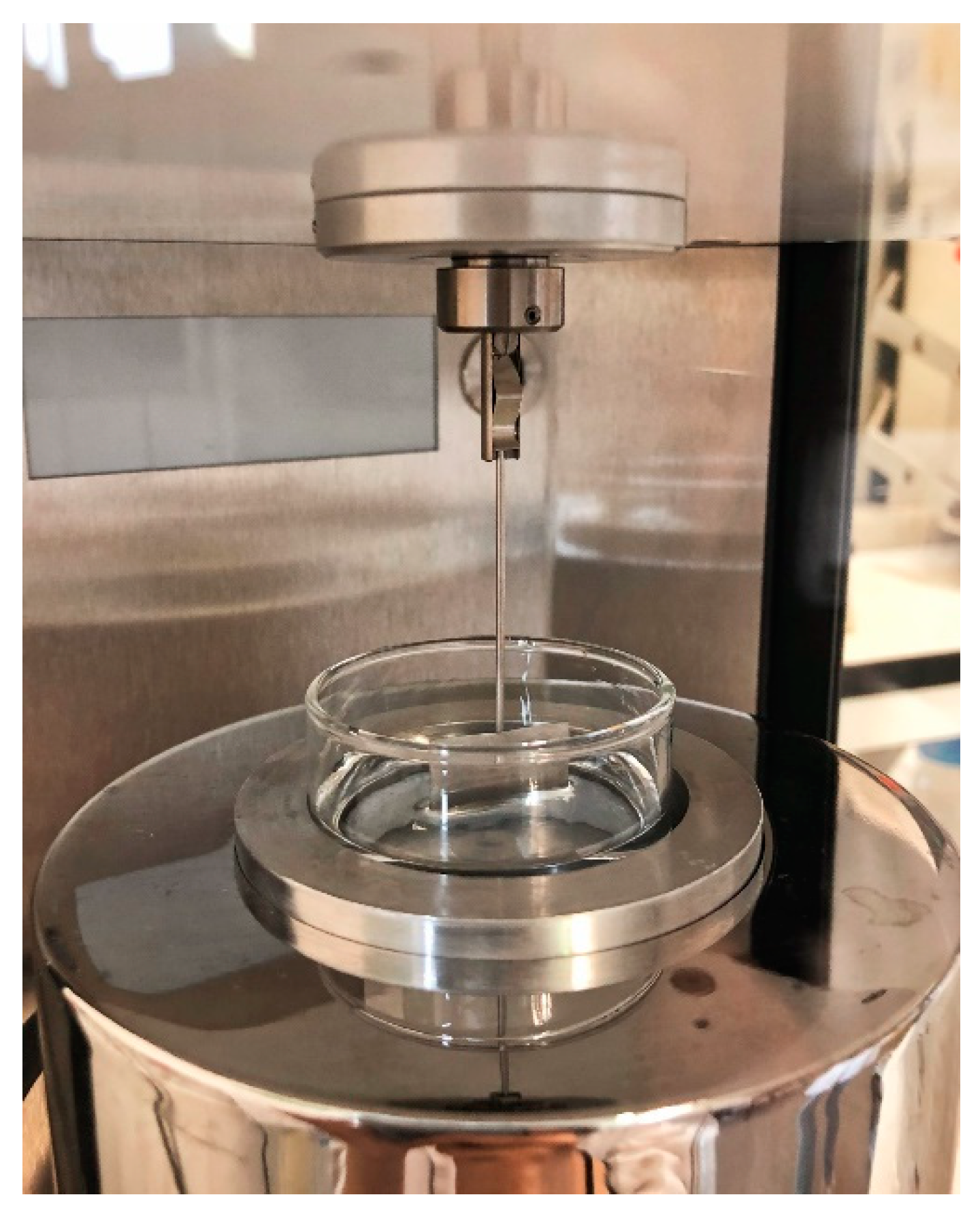
3.1. Effect of TiO2 on Surface Tension
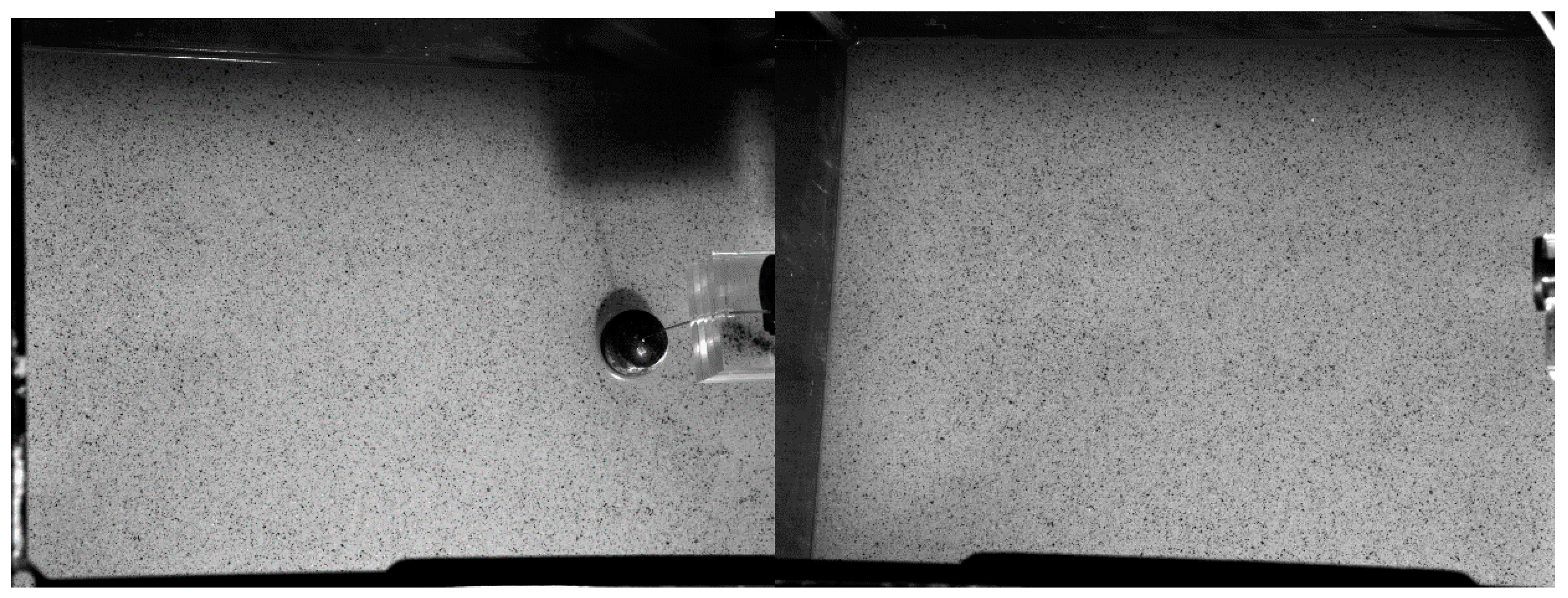
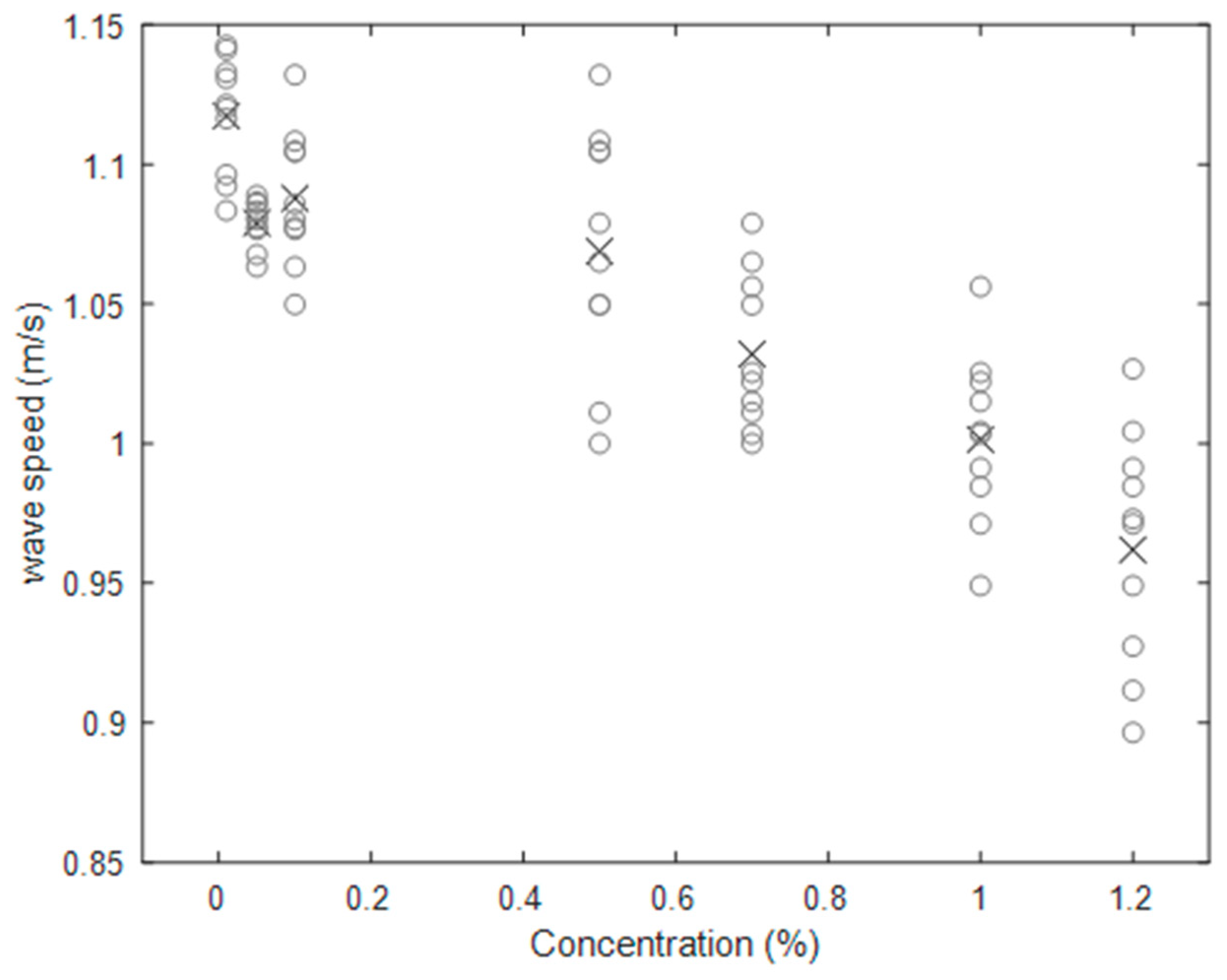
3.2. Effect of TiO2 on Gravity–Capillary Waves
4. Conclusions and Recommendations
- KV2 is more accurate and more reliable spatially and temporally for scientific applications.
- A TiO2 concentration of at least 0.01% is required for reliable Kinect measurements of surface shape.
- TiO2 concentration above 0.01% substantially affects fluid properties and must be taken into account if using TiO2-Kinect-derived data for model validation or other practical purposes.
- TiO2 of >1% is more significantly affected, showing a 27.85% reduction in gravity wave height and a 13.91% reduction in phase speed compared with a 0.01% concentration. It is strongly recommended to use the lower concentration to more closely represent pure water dynamics.
- TiO2 must remain well mixed, so this technique is not recommended for low Re flows or transient processes involving still water.
Author Contributions
Funding
Conflicts of Interest
References
- Konmori, S.; Murakami, Y.; Ueda, H. The relationship between surface renewal and busting motions in an open channel flow. J. Fluid Mech. 1989, 203, 103–123. [Google Scholar] [CrossRef]
- Horoshenkov, K.; Nichols, A.; Tait, S.; Maximov, G. The pattern of surface waves in a shallow free-surface flow. J. Geophys. Res. Earth Surf. 2013, 118, 1864–1876. [Google Scholar] [CrossRef]
- Nichols, A. Free Surface Dynamics in Shallow Turbulent Flows. Ph.D. Thesis, University of Bradford, Bradford, UK, 2013. [Google Scholar]
- Fujita, I.; Furutani, Y.; Okanishi, T. Advection features of water surface profile in turbulent open-channel flow with hemisphere roughness elements. Vis. Mech. Process. 2011, 1. [Google Scholar] [CrossRef]
- Roy, A.G.; Buffin-Blanger, T.; Lamarre, H.; Kirkbride, A.D. Size, shape and dynamics of large scale turbulent flow structures in a gravel bed river. J. Fluid Mech. 2004, 500, 1–27. [Google Scholar] [CrossRef] [Green Version]
- Gabreil, E.; Tait, S.; Shao, S.; Nichols, A. SPHysics simulation of laboratory shallow free surface turbulent flows over a rough bed. J. Hydraul. Res. 2018, 56, 727–747. [Google Scholar] [CrossRef] [Green Version]
- Evers, F.M.; Hager, W.H. Spatial impulse waves: Wave height decay experiments at laboratory scale. Landslides 2016, 13, 1395–1403. [Google Scholar] [CrossRef]
- Rashidi, M.; Hetsroni, G.; Benerjee, S. Wave-turbulence interaction in free-surface channel flows. Phys. Fluids 1992, 4, 2727–2738. [Google Scholar] [CrossRef]
- Savelsberg, R.; Van de Water, W. Experiments on free-surface turbulence. J. Fluid Mech. 2008, 619, 95. [Google Scholar] [CrossRef] [Green Version]
- Smolentsev, S.; Miranghaie, R. Study of a free-surface in open channel water flow in the regime from weak to strong turbulence. Int. J. Multiph. Flow 2005, 31, 921–939. [Google Scholar] [CrossRef]
- Boon, J.; Brubaker, J. Acoustic-microwave water level sensor comparisons in an estuarine environment. Ocean. Int. Conf. 2008. [Google Scholar] [CrossRef]
- Tsubaki, R.; Fujita, I. Stereoscopic measurement of a fluctuating free surface with discontinuities. Meas. Sci. Technol. 2005, 16, 1894–1902. [Google Scholar] [CrossRef]
- Takamasa, T.; Hazuku, T. Measuring inter-facial waves on film flowing down a vertical plate wall in the entry region using laser focus displacement meters. Int. J. Heat Mass Transf. 2000, 43, 2807–2819. [Google Scholar] [CrossRef]
- Lommer, M.; Levinsen, M. Using laser-induced fluorescence in the study of surface water turbulence. J. Fluoresc. 2002, 12, 45–50. [Google Scholar] [CrossRef]
- Rubinato, M.; Martins, R.; Kesserwani, G.; Leandro, J.; Djordjevic, S.; Shucksmith, J.D. Experimental calibration and validation of sewer/surface flow exchange equations in steady and unsteady flow conditions. J. Hydrol. 2017, 552, 421–432. [Google Scholar] [CrossRef]
- Rubinato, M.; Martins, R.; Shucksmith, J. Quantification of energy losses at a surcharging manhole. Urban Water J. 2018, 15, 234–241. [Google Scholar] [CrossRef] [Green Version]
- Rubinato, M.; Lee, S.; Martins, R.; Shucksmith, J. Surface to sewer flow exchange through circular inlets during urban flood conditions. J. Hydroinformatics 2018, 20, 564–576. [Google Scholar] [CrossRef] [Green Version]
- Beg, M.; Carvalho, R.; Tait, S.; Brevis, W.; Rubinato, M.; Schellart, A.; Leandro, J. A comparative study of manhole hydraulics using stereoscopic PIV and different RANS models. Water Sci. Technol. 2018, 2017, 87–98. [Google Scholar] [CrossRef]
- Hahn, E.; Lyn, D. Anomalous contraction scour? Vertical-contraction case. J. Hydraul. Eng. 2010, 136, 137–141. [Google Scholar] [CrossRef] [Green Version]
- Coleman, S.E.; Andrews, D.P.; Webby, M.G. Overtopping breaching of non-cohesive homogeneous embankments. J. Hydraul. Eng. 2002, 128, 829–838. [Google Scholar] [CrossRef]
- Gabl, R.; Steynor, J.; Forehand, D.I.M.; Davey, T.; Bruce, T.; Ingram, D.M. Capturing the Motion of the Free Surface of a Fluid Stored within a Floating Structure. Water 2019, 11, 50. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Sung, H.J.; Park, J.S. PIV measurement of flow around an arbitrarily moving free surface. Exp. Fluids 2015, 56. [Google Scholar] [CrossRef]
- Gonzalez, E.; Femarques, J.; Diaz-Pache, F.; Agudo, J.; Gomez, L. Experimental validation of a sediment transport two dimensional depth-averaged numerical model using PIV and 3D scanning technologies. J. Hydraul. Res. 2008, 46, 489–503. [Google Scholar] [CrossRef]
- Khoshelham, K.; Elberink, S. Accuracy and resolution of Kinect depth data for indoor mapping applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Izadi, S.; Kim, D.; Hilliges, O.; Molyneaux, D.; Newcombe, R.; Kholi, P.; Shotton, J.; Hodges, S.; Freeman, D.; Davidson, A.; et al. Kinect fusion: Real-time 3D reconstruction and interaction using a moving depth camera. In Proceedings of the UIST’11, Santa Barbara, CA, USA, 16–19 October 2011. [Google Scholar]
- Chang, Y.; Chen, S.; Huang, J. A Kinect-based system for physical rehabilitation: A pilot study for young adults with motor disabilities. Res. Dev. Disabil. 2011, 32, 2566–2570. [Google Scholar] [CrossRef]
- Patel, S.; Chauhan, Y. Heart attack detection and medical attention using motion sensing device. Int. J. Sci. Res. Publ. 2014, 4, 468–471. [Google Scholar]
- Boulos, M.N.K.; Resch, B.; Crowley, D.N.; Breslin, J.G.; Sohn, G.; Burtner, R.; Pike, W.A.; Jezierski, E.; Chuang, K.Y.S. Crowdsourcing, citizen sensing and sensor web technologies for public and environmental health surveillance and crisis management: Trends, OGC standards and application examples. Int. J. Health Geogr. 2011, 10, 67. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mankoff, K.; Russo, T. The Kinect: A low-cost, high-resolution, short-range 3D camera. Earth Surf. Process. Landforms 2013, 38, 926–936. [Google Scholar] [CrossRef]
- Amaral, S.; Caldeira, L.; Viseu, T.; Ferreira, R. Designing Experiments to Study Dam Breach Hydraulic Phenomena. J. Hydraul. Eng. 2020, 146, 04020014. [Google Scholar] [CrossRef]
- Amaral, S.; Viseu, T.; Ferreira, R. Experimental methods for local-scale characterization of hydro-morphodynamic dam breach processes. Breach detection, 3D reconstruction, flow kinematics and spatial surface velocimetry. Flow Meas. Instrum. 2019, 70, 70. [Google Scholar] [CrossRef]
- Manghisi, V.M.; Uva, A.E.; Fiorentino, M.; Bevilacqua, V.; Trotta, G.F.; Monno, G. Real time RULA assessment using Kinect v2 sensor. Appl. Ergon. 2016, 65, 481–491. [Google Scholar] [CrossRef]
- Gonzalez-Jorge, H.; Riveiro, B.; Vazquez-Fernandez, E.; Martinez-Sanchez, J.; Aria, P. Metrological evaluation of Microsoft Kinect and Asus Xtion sensors. Measurement 2013, 46, 1800–1806. [Google Scholar] [CrossRef]
- Gonzalez-Jorge, H.; Rodriguez-Gonzalvez, P.; Martinez-Sanchez, J.; Gonzalez-Aguilera, D.; Aria, P.; Gesto, M.; Diaz-Vilarino, L. Metrological comparison between Kinect I and Kinect II sensors. Measurement 2015, 70, 21–26. [Google Scholar] [CrossRef]
- Wasenmüller, O.; Stricker, D. Comparison of Kinect v1 and v2 Depth Images in Terms of Accuracy and Precision. In Proceedings of the Computer Vision–ACCV 2016 Workshops, Taipei, Taiwan, 20–24 November 2016. [Google Scholar]
- Amon, C.; Fuhrman, F. Evaluation of the spatial resolution accuracy of the face tracking system for Kinect for Windows V1 and V2. In Proceedings of the 6th Congress of Alps-Adria Acoustics Association, Graz, Austria, 16–17 October 2014. [Google Scholar]
- Hong, S.; Saavedra, G.; Matines-Corral, M. Full parallax three-dimensional display from Kinect v1 and v2. Opt. Eng. 2016, 56, 41305. [Google Scholar] [CrossRef] [Green Version]
- Samir, M.; Golkar, E.; Rahni, A. Comparison between the Kinect™ V1 and Kinect™ V2 for respiratory motion tracking. In Proceedings of the IEEE International Conference on Signal and Image Processing Applications (ICSIPA), Kuala Lumpur, Malaysia, 19–21 October 2015. [Google Scholar]
- Nichols, A.; Rubinato, M. Remote sensing of environmental processes via low-cost 3D free-surface mapping. In Proceedings of the 4th IHAR Europe Congress, Liege, Belgium, 27–29 July 2016. [Google Scholar]
- Martinez-Aranda, S.; Fernandez-Pato, J.; Caviedes-Voullieme, D.; Garcia-Palacin, I.; Garcia-Navarro, P. Towards transient experimental water surfaces: Strengthening two-dimensional SW model validation. In Proceedings of the 13th International Conference on Hydroinformatics, Palermo, Italy, 1–6 July 2018. [Google Scholar]
- Martinez-Aranda, S.; Fernandez-Pato, J.; Caviedes-Voullieme, D.; Garcia-Palacin, J.; Garcia-Navarro, P. Towards transient experimental water surfaces: A new benchmark datasets for 2D shallow water solvers. Adv. Water Resour. 2018, 121, 130–149. [Google Scholar] [CrossRef]
- Combes, B.; Guibert, A.; Memin, E.; Heitz, D. Free-surface flows from Kinect: Feasibility and limits. In Proceedings of the Forum on Recent Developments in Volume Reconstruction Techniques Applied to 3D Fluid and Solid Mechanics, FVR2011, Poitiers, France, 29 November–1 December 2011. [Google Scholar]
- Toselli, F.; De Lillo, F.; Onorato, M.; Boffetta, G. Measuring surface gravity waves using a Kinect sensor. J. Mech. B/Fluids 2019, 74, 260–264. [Google Scholar] [CrossRef] [Green Version]
- Cho, Y.H.; Rubinato, M.; Nichols, A. The Kinect sensor as a tool for remote flow characterization. In Proceedings of the 37th IAHR World Congress 2017, Kuala Lumpur, Malaysia, 13–18 August 2017; pp. 5600–5607. [Google Scholar]
- Cobelli, P.J.; Maurel, A.; Pagneux, V.; Petitjeans, P. Global measurement of water waves by Fourier transform profilometry. Exp. Fluids 2009, 46, 1037. [Google Scholar] [CrossRef]
- Aureli, F.; Maranzoni, A.; Mignosa, P.; Ziveri, C. An image processing technique for measuring free surface of dam-break flows. Exp. Fluids 2011, 50, 665–675. [Google Scholar] [CrossRef]
- Chatellier, L.; Jarny, S.; Gibouin, F.; David, L. A parametric PIV/DIC method for the measurement of free surface flows. Exp. Fluids 2013, 54, 1488. [Google Scholar] [CrossRef]
- Cang, Y.; He, H.; Qiao, Y. Measuring the wave height based on binocular cameras. Sensors 2019, 19, 1338. [Google Scholar] [CrossRef] [Green Version]
- Tadeu Abrahao, R. Study on the Dispersion of Titanium Dioxide Pigment Particles in Water. Ph.D. Thesis, Escola Politecnica da Universidade de Sao Paulo, Sao Paulo, Brazil, 2013. [Google Scholar]
- Przadka, A.; Cabane, B.; Pagneux, V.; Maurel, A.; Petitjeans, P. Fourier transform profilometry for water water waves: How to achieve clean water attenuation with diffusive reflection at the water surface. Exp. Fluids 2012, 52, 519–527. [Google Scholar] [CrossRef]
- Stuart, A.D. Some applications of infrared optical sensing. Sens. Actuators B Chem. 1993, 11, 185–193. [Google Scholar] [CrossRef]
- Singh, V.; Lin, P.T.; Patel, N.; Lin, H.; Li, L.; Zou, Y.; Deng, F.; Ni, C.; Hu, J.; Giammarco, J.; et al. Mid-infrared materials and devices on a Si platform for optical sensing. Sci. Technol. Adv. Mater. 2014, 15, 14603. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Zhang, L.; Dong, H.; Alelaiwi, A.; El Saddik, A. Evaluating and Improving the Depth Accuracy of Kinect for Windows v2. IEEE Sens. J. 2015, 15, 1. [Google Scholar] [CrossRef]
- Khosravi, K.; Rostaminejad, M.; Cooper, J.R.; Mao, L.; Melesse, A.M. Chapter 31—Dam break analysis and flood inundation mapping: The case study of Sefid-Roud Dam, Iran. In Extreme Hydrology and Climate Variability, Monitoring Modelling, Adaptation and Mitigation; Elsevier: Amsterdam, The Netherlands, 2019; pp. 395–405. [Google Scholar]
- Valiani, A.; Caleffi, V. Dam break in rectangular channels with different upstream-downstream widths. Adv. Water Resour. 2019, 132, 103389. [Google Scholar] [CrossRef] [Green Version]
- Shu, A.; Wang, S.; Rubinato, M.; Wang, M.; Qin, J.; Zhu, F. Numerical modeling of debris flows induced by dam-break using the Smoothed Particle Hydrodynamics (SPH) method. Appl. Sci. 2020, 10, 2954. [Google Scholar] [CrossRef]
- Shao, S.; Lo, E.Y.M. Incompressible SPH method for simulating Newtonian and non-Newtonian flows with a free surface. Adv. Water Resour. 2003, 26, 787–800. [Google Scholar] [CrossRef]
- Laiadi, A.; Merzougui, A. Free surface flows over a successive obstacles with surface tension and gravity effects. AIMS Math. 2019, 4, 316–326. [Google Scholar] [CrossRef]
- Balabel, A.; Alzaed, A. Computational fluid dynamics of dam-break problem with different fluid properties using the level set method. Energy Res. 2018, 2, 52–61. [Google Scholar] [CrossRef]
- Le Hocine, A.; Lacey, R.; Poncet, S. Multiphase modeling of the free surface flow through a Darrieus horizontal axis shallow-water turbine. Renew. Energy 2019, 143, 1890–1901. [Google Scholar] [CrossRef]
- Rojas, S.; Rubinato, M.; Nichols, A.; Shucksmith, J. Cost effective measuring technique to simultaneously quantify 2D velocity fields and depth-averaged solute concentrations in shallow water flows. J. Flow Meas. Instrum. 2018, 64, 213–223. [Google Scholar] [CrossRef]
- Dolcetti, G.; Krynkin, A.; Horoshenkov, K.V.; Tait, S.J. An Acoustic Technique to Measure the Velocity of Shallow Turbulent Flows Remotely. In Free Surface Flows and Transport Processes. GeoPlanet: Earth and Planetary Sciences; Kalinowska, M., Mrokowska, M., Rowiński, P., Eds.; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Horoshenkov, K.; Van Rentergham, T.; Nichols, A.; Krynkin, A. Finite difference time domain modelling of sound scattering by the dynamically rough surface of a turbulent open channel flow. Appl. Acoust. 2016, 110, 13–22. [Google Scholar] [CrossRef] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Author | Kinect Version | Colourant |
|---|---|---|---|
| Free-surface flows from Kinect: feasibility and limits. Proc., Forum on Recent Developments in Volume Reconstruction Techniques Applied to 3D Fluid and Solid Mechanics (FVR 2011), Chasseneuil, France 2011. [42] | Combès, B., Guibert, A., Memin, E., Heitz D. | 1 | “white dye”, concentration not stated |
| Remote sensing of environmental processes via low-cost 3D free-surface mapping, 4th IAHR Europe Congress, Liege, Belgium, 27–29 July 2016. [39] | Nichols, A., Rubinato, M. | 1 | TiO2, concentration not stated |
| P. Towards transient experimental water surfaces: A new benchmark dataset for 2D shallow water solvers. Advances in Water Resources, 121, 130–149, 2018. [40] | Martinez-Aranda, S., Fernandez-Pato, J., Caviedes-Voullieme, D., Garcia-Palacin, I., Garcia-Navarro, P. | 1 | TiO2, concentration 1.2% |
| Measuring surface gravity waves using a Kinect sensor. Journal of Mechanics – B/Fluids, 2018. [43] | Toselli, F., De Lillo, Onorato, M., Boffetta, G. | 1 | “commercial paint”, concentration 1% |
| Towards transient experimental water surfaces: strengthening two-dimensional SW model validation. 13th International Conference on Hydroinformatics, Palermo, 1–6 July 2018. [41] | Martinez-Aranda, S., Fernandez-Pato, J., Caviedes-Voullieme, D., Garcia-Palacin, I., Garcia-Navarro, P. | 1 | TiO2, concentration 1.2% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nichols, A.; Rubinato, M.; Cho, Y.-H.; Wu, J. Optimal Use of Titanium Dioxide Colourant to Enable Water Surfaces to Be Measured by Kinect Sensors. Sensors 2020, 20, 3507. https://doi.org/10.3390/s20123507
Nichols A, Rubinato M, Cho Y-H, Wu J. Optimal Use of Titanium Dioxide Colourant to Enable Water Surfaces to Be Measured by Kinect Sensors. Sensors. 2020; 20(12):3507. https://doi.org/10.3390/s20123507
Chicago/Turabian StyleNichols, Andrew, Matteo Rubinato, Yun-Hang Cho, and Jiayi Wu. 2020. "Optimal Use of Titanium Dioxide Colourant to Enable Water Surfaces to Be Measured by Kinect Sensors" Sensors 20, no. 12: 3507. https://doi.org/10.3390/s20123507
APA StyleNichols, A., Rubinato, M., Cho, Y. -H., & Wu, J. (2020). Optimal Use of Titanium Dioxide Colourant to Enable Water Surfaces to Be Measured by Kinect Sensors. Sensors, 20(12), 3507. https://doi.org/10.3390/s20123507