UAV Positioning Mechanisms in Landing Stations: Classification and Engineering Design Review



Abstract
:1. Introduction
- connecting and disconnecting contacts to charge the batteries;
- exchanging information with a UAV;
- battery replacement/refueling;
- loading and unloading of transported goods, and so on.
- a review of the state-of-the-art of UAV landing stations based on patents and commercial prototypes and products;
- a classification of approaches for UAV positioning in landing platforms;
- an analysis of the required landing precision, as well as the pros and cons of each type of approach.
2. Classification of Approaches for UAV Positioning in Landing Platforms
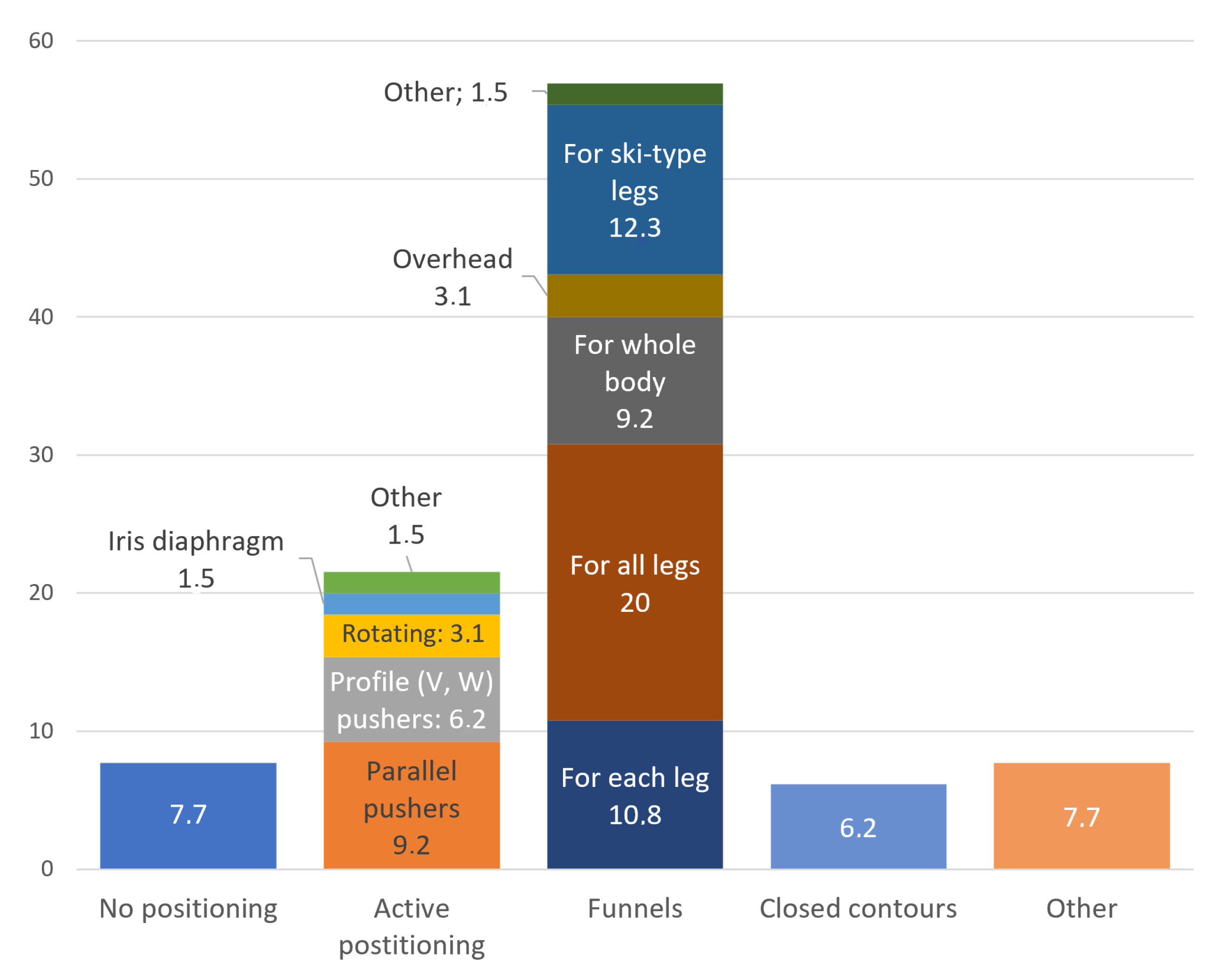
- platforms without positioning devices 8%
- platforms with active positioning device 22%
- platforms with passive positioning device 63%
- platforms with non-standard positioning devices 7%.
- positioning devices with parallel pushers (42%) and profile pushers (28%) among active positioning devices
- a positioning funnel for all UAV legs (39%) among the passive positioning devices.
3. Landing Platforms without UAV Positioning
4. Active Methods of UAV Positioning
4.1. Active Method of UAV Positioning with Parallel Pushers
4.2. Landing Platforms with “V”- and “W”-Shaped Pushers
4.3. Landing Platforms with Rotating Pushers
4.4. Landing Platforms with Iris Diaphragms
5. Landing Platforms with Passive Positioning
5.1. Landing Platforms with Conical Funnels
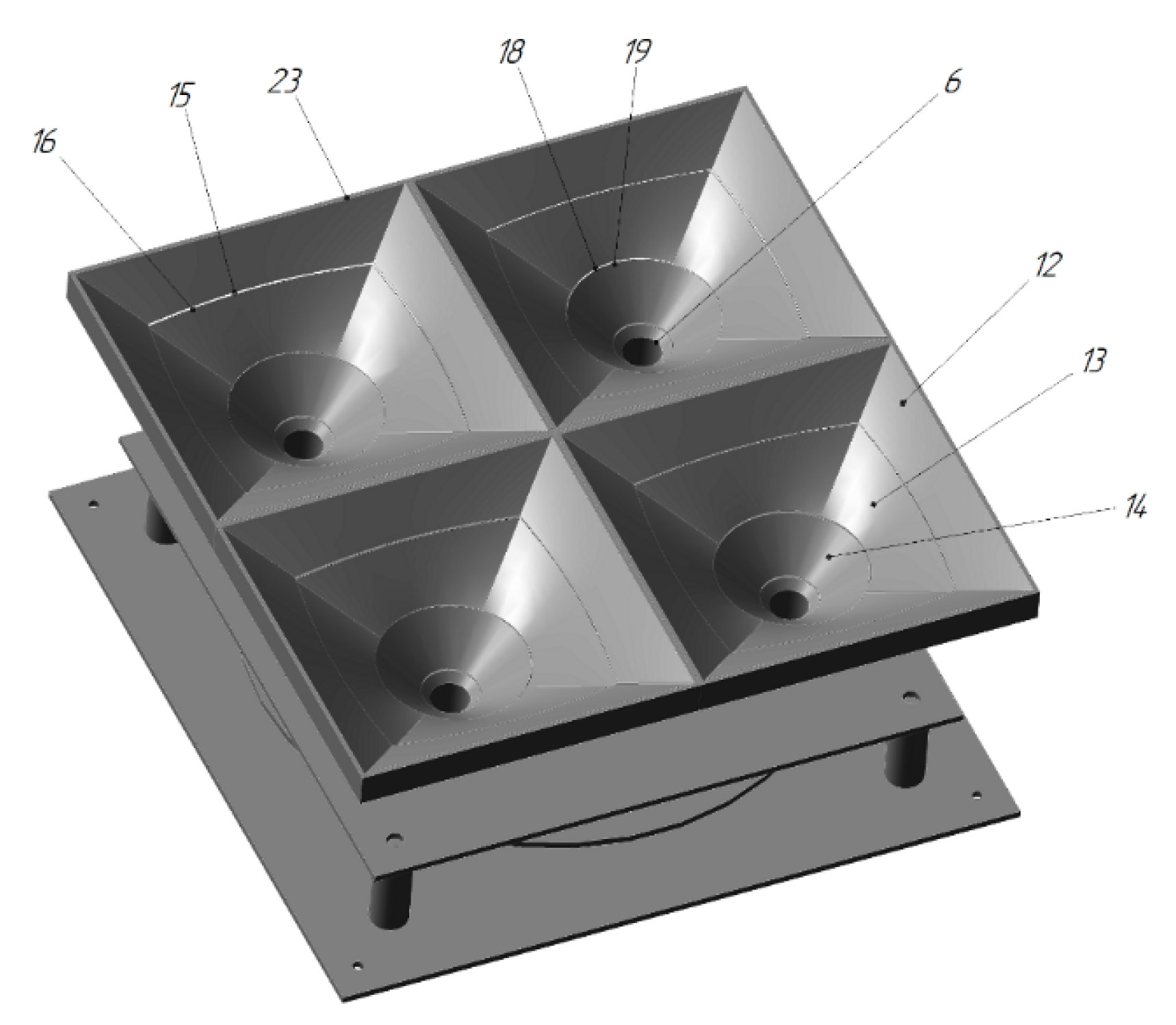
5.1.1. Landing Platforms with Separate Conical Funnels for Each Leg
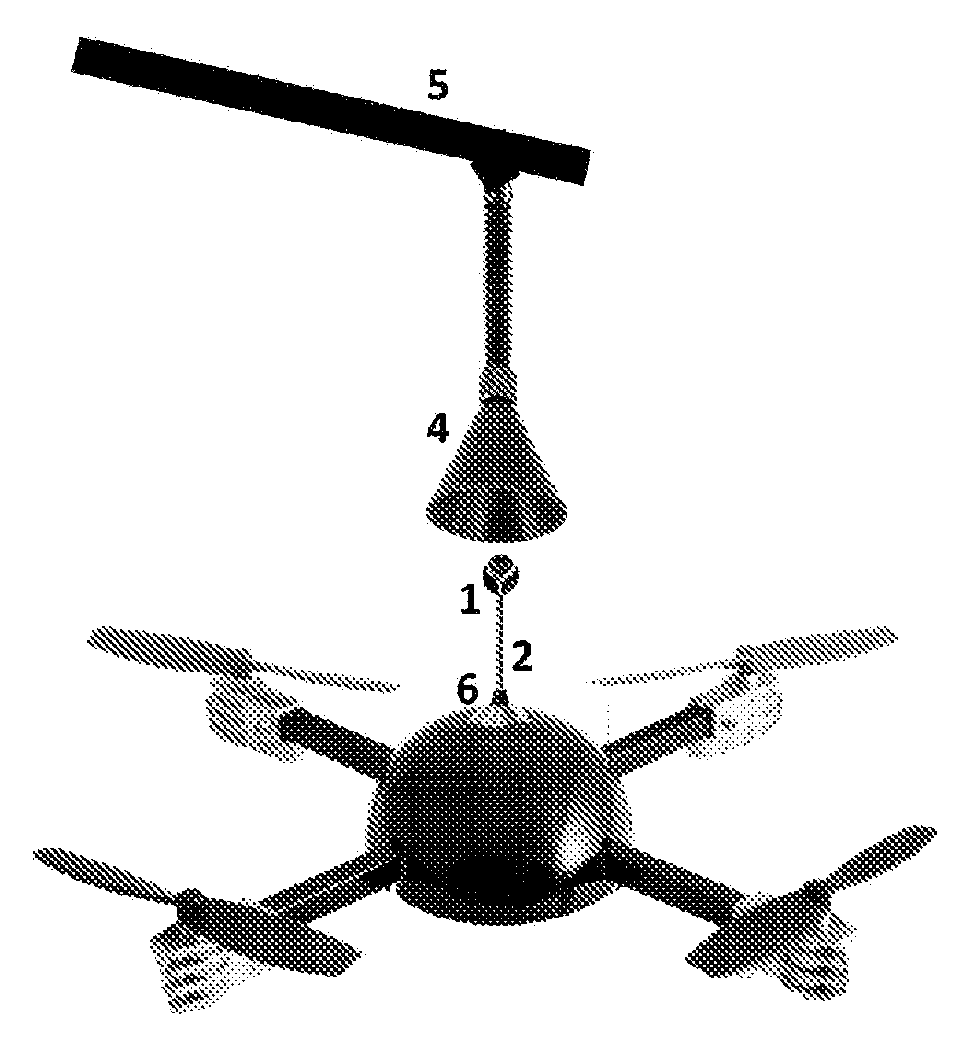
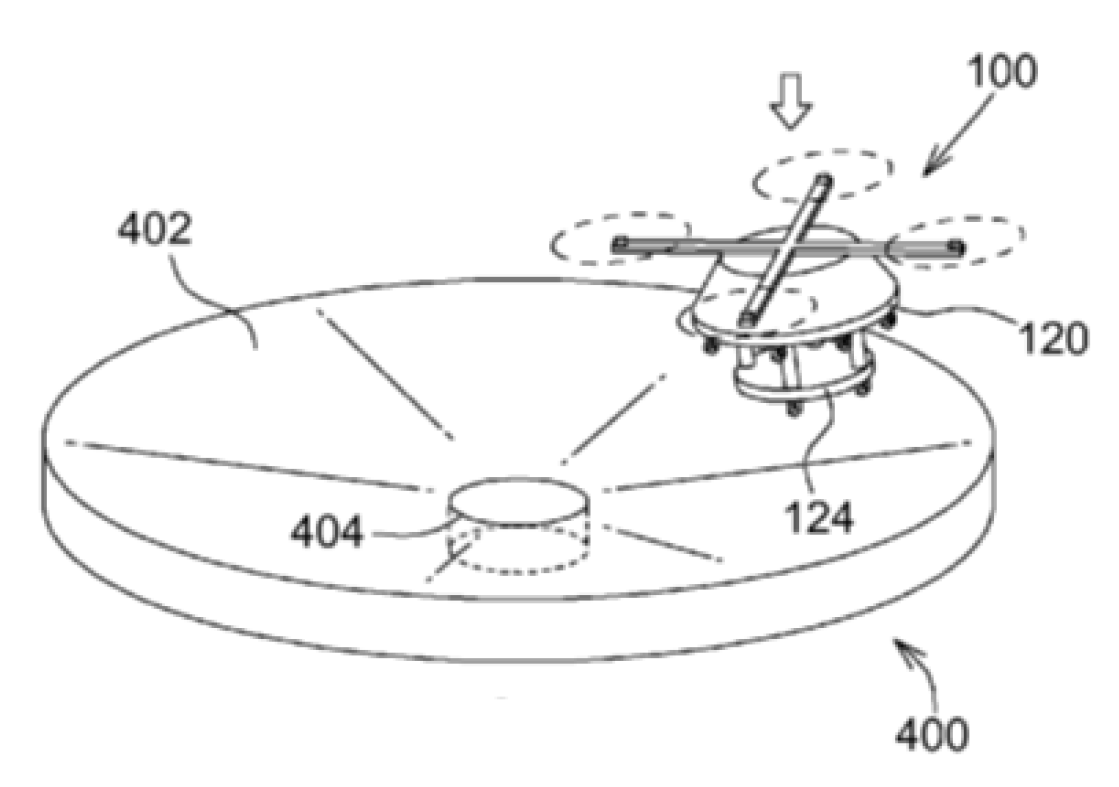
5.1.2. Landing Platforms with Overhead Cone Funnels for UAV Positioning
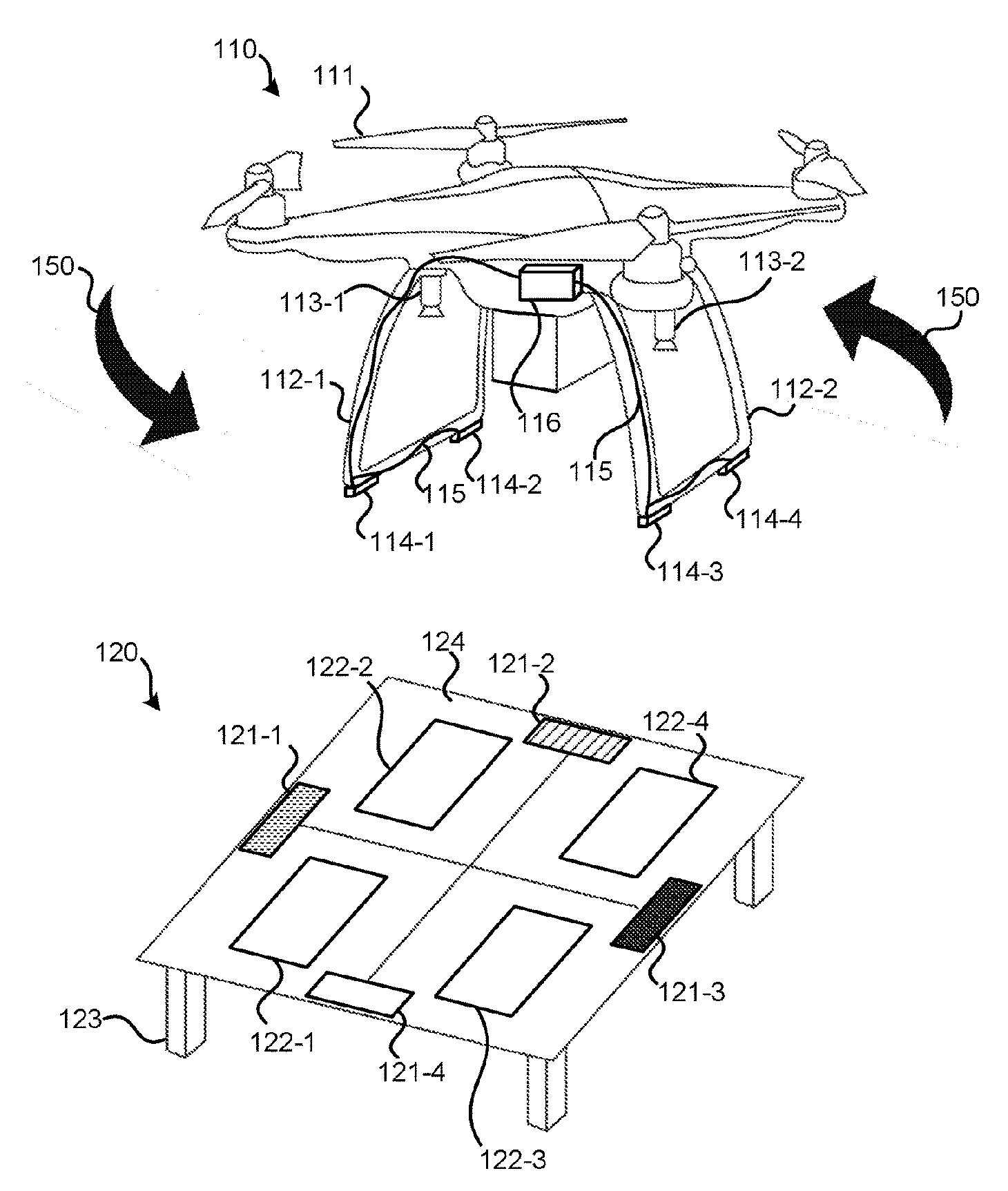
5.1.3. Landing Platforms with a Conical Funnel for All Uav Legs
5.1.4. Landing Platforms for UAVs with Ski-Type Legs
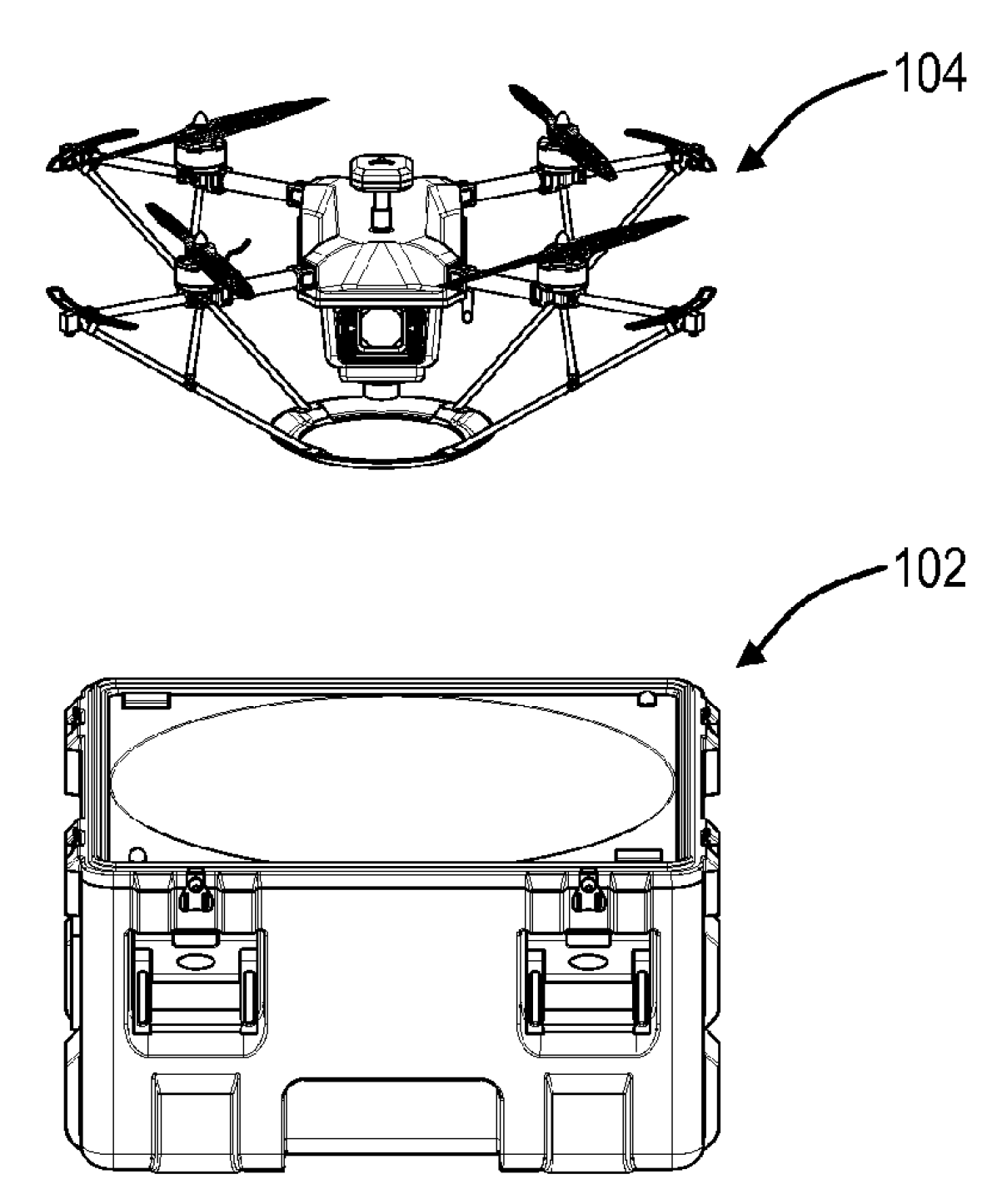
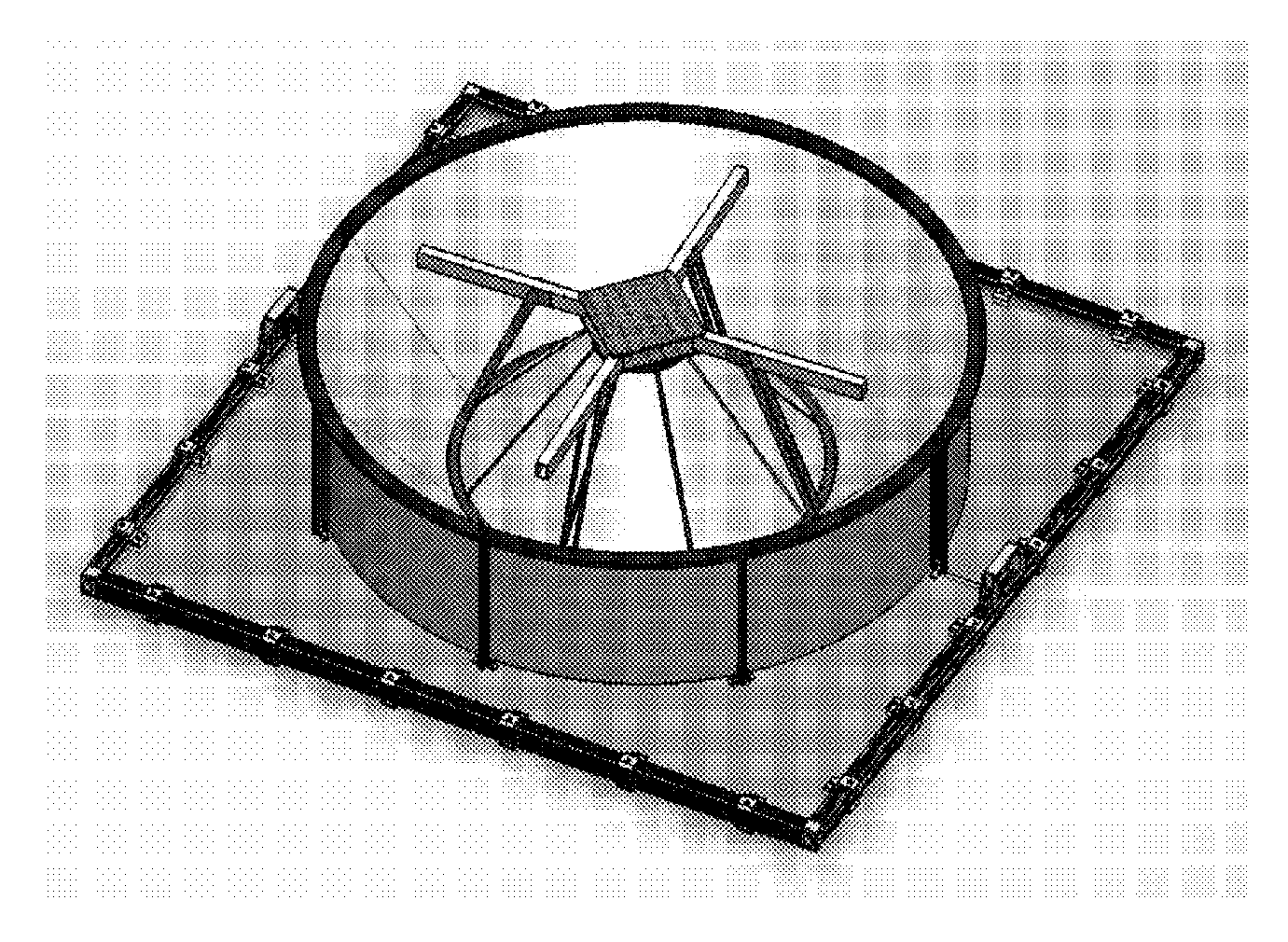
5.1.5. Landing Platforms with Funnels for the Whole UAV Body
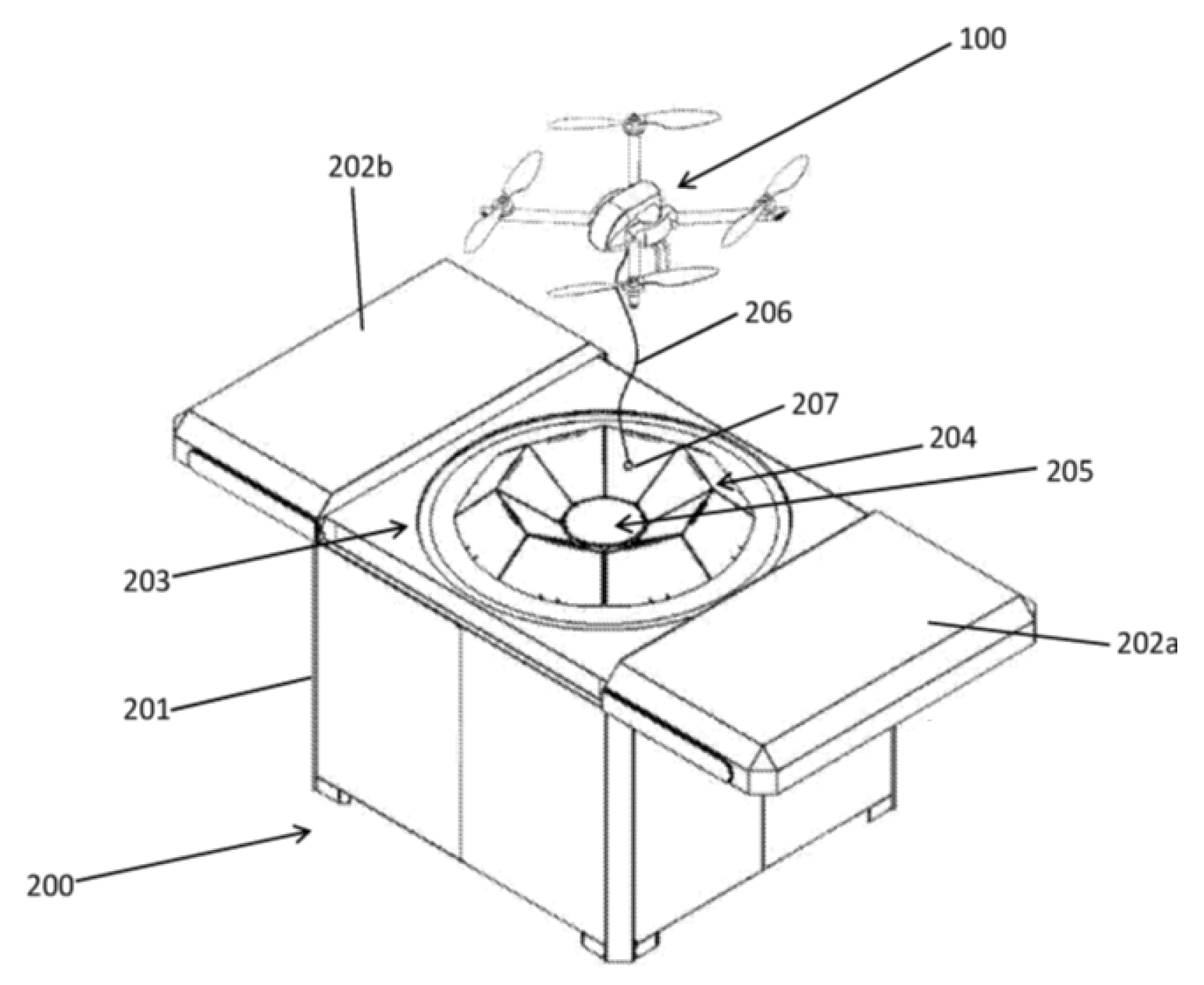
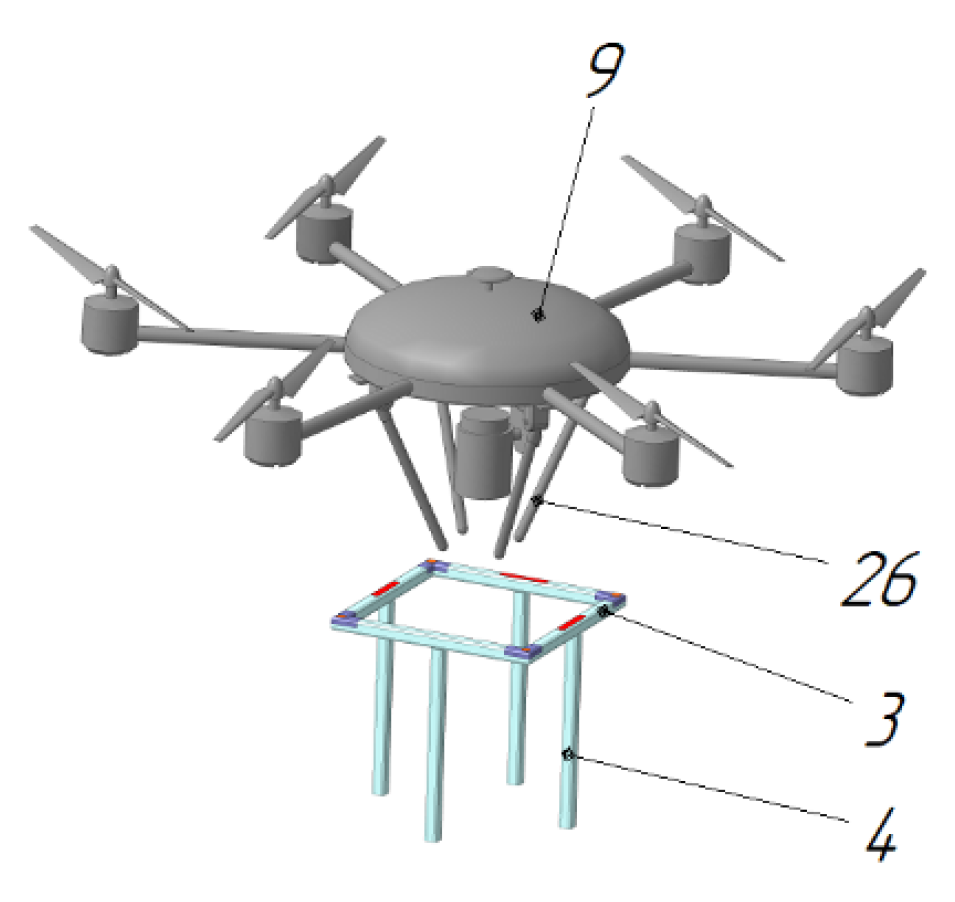
5.2. Landing Surfaces in the Form of Closed Contours
5.3. Combined Positioning Devices
6. Non-Standard Landing Platforms
7. Conclusions
Funding
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | Directory of open access journals |
| UAV | Unmanned aerial vehicle |
| VTOL | Vertical Take-Off and Landing |
| AC | Alternating current |
References
- Choi, C.H.; Jang, H.J.; Lim, S.G.; Lim, H.C.; Cho, S.H.; Gaponov, I. Automatic wireless drone charging station creating essential environment for continuous drone operation. In Proceedings of the 2016 International Conference on Control, Automation and Information Sciences, ICCAIS 2016, Ansan, Korea, 27–29 October 2016. [Google Scholar] [CrossRef]
- Feng, Y.; Zhang, C.; Baek, S.; Rawashdeh, S.; Mohammadi, A. Autonomous Landing of a UAV on a Moving Platform Using Model Predictive Control. Drones 2018, 2, 34. [Google Scholar] [CrossRef] [Green Version]
- Guastella, D.; Cantelli, L.; Melita, C.; Muscato, G. A global path planning strategy for a UGV from aerial elevation maps for disaster response. In Proceedings of the ICAART 2017—Proceedings of the 9th International Conference on Agents and Artificial Intelligence, Porto, Portugal, 24–26 February 2017; Volume 1, pp. 335–342. [Google Scholar] [CrossRef]
- Fedorenko, R.; Gabdullin, A.; Fedorenko, A. Global UGV Path Planning on Point Cloud Maps Created by UAV. In Proceedings of the 2018 3rd IEEE International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 3–5 September 2018; pp. 253–258. [Google Scholar]
- Hood, S.; Benson, K.; Hamod, P.; Madison, D.; O’Kane, J.M.; Rekleitis, I. Bird’s eye view: Cooperative exploration by UGV and UAV. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems, ICUAS 2017, Miami, FL, USA, 13–16 June 2017; pp. 247–255. [Google Scholar] [CrossRef] [Green Version]
- Manderson, T.; Wapnick, S.; Meger, D.; Dudek, G. Learning to Drive Off Road on Smooth Terrain in Unstructured Environments Using an On-Board Camera and Sparse Aerial Images. arXiv 2020, arXiv:cs.RO/2004.04697. [Google Scholar]
- Rashid, N.A.A.; Deen, S.A.; Bishop, A.; Collins, D.; Cott, B.; Growley, S.K.; Lieberman, P.; Owens, K.; Stanco, A.; Stoffle, M.; et al. DRIFT: Drone-rover integrated fire tracker system. In Proceedings of the 77th SAWE International Conference on Mass Properties Engineering 2018, Irving, TX, USA, 8–10 March 2018. [Google Scholar]
- Liu, Z.N.; Leo, D.; Zhao, H.W.; Wang, Z.h.; Liu, X.Q. QUADO: And Autonomoys Recharge System for Quadcopter. In Proceedings of the 2017 IEEE 8th International Conference on CIS & RAM, Ningbo, China, 19–21 November 2017; pp. 7–12. [Google Scholar]
- Jiang, Z. An Autonomous Landing and Charging System for Drones. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2019. [Google Scholar]
- Custodio, M.A.; Jensfelt, P.; Gustafson, J. Autonomous Recharging System for Drones: Detection and Landing on the Charging Platform. Master’s Thesis, KTH Royal Institute Of Technology, Stockholm, Sweden, 2019. [Google Scholar]
- Junaid, A.B.; Konoiko, A.; Zweiri, Y.; Sahinkaya, M.N.; Seneviratne, L. Autonomous wireless self-charging for multi-rotor unmanned aerial vehicles. Energies 2017, 10, 803. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Innovative design of drone landing gear used as a receiving coil in wireless charging application. Energies 2019, 12, 3483. [Google Scholar] [CrossRef] [Green Version]
- Le, A.; Truong, L.; Quyen, T.; Nguyen, C.; Nguyen, M. Wireless Power Transfer Near-field Technologies for Unmanned Aerial Vehicles (UAVs): A Review. Eai Endorsed Trans. Ind. Networks Intell. Syst. 2020, 7, 162831. [Google Scholar] [CrossRef] [Green Version]
- Al-Obaidi, M.R.; Mustafa, M.A.; Wan Hasan, W.Z.; Azis, N.B.; Sabry, A.H.; Ang, S.P.; Hamid, Z.H.A. Efficient Charging Pad for Unmanned Aerial Vehicle Based on Direct Contact. In Proceedings of the 2018 IEEE 5th International Conference on Smart Instrumentation, Measurement and Application, ICSIMA 2018, Kuching, Sarawak, 24–26 July 2018. [Google Scholar] [CrossRef]
- Dias, A. Network of Multipurpose Docking Stations for Delivery Drones. Master’s Thesis, Instituto Superior Tecnico, Lisboa, Portugal, 2019. [Google Scholar]
- Kim, S.; Moon, I. Traveling salesman problem with a drone station. IEEE Trans. Syst. Man, Cybern. Syst. 2019. [Google Scholar] [CrossRef]
- Hong, I.; Kuby, M.; Murray, A.T. A range-restricted recharging station coverage model for drone delivery service planning. Transp. Res. Part Emerg. Technol. 2018. [Google Scholar] [CrossRef]
- Baca, T.; Stepan, P.; Saska, M. Autonomous Landing On A Moving Car With Unmanned Aerial Vehicle. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Cantelli, L.; Guastella, D.; Melita, C.; Muscato, G. Autonomous Landing of a Uav on a Moving Vehicle for the Mbzirc. Hum.-Centric Robot. 2017, 197–204. [Google Scholar] [CrossRef]
- Beul, M.; Houben, S.; Nieuwenhuisen, M.; Behnke, S. Fast autonomous landing on a moving target at MBZIRC. In Proceedings of the 2017 European Conference on Mobile Robots, ECMR 2017, Paris, France, 6–8 September 2017. [Google Scholar] [CrossRef]
- Borowczyk, A.; Nguyen, D.T.; Nguyen, A.P.V.; Nguyen, D.Q.; Saussié, D.; Ny, J.L. Autonomous Landing of a Multirotor Micro Air Vehicle on a High Velocity Ground Vehicle. IFAC-PapersOnLine 2017, 50, 10488–10494. [Google Scholar] [CrossRef]
- Gautam, A.; Sujit, P.B.; Saripalli, S. A survey of autonomous landing techniques for UAVs. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems, ICUAS 2014—Conference Proceedings, Orlando, FL, USA, 27–30 May 2014; pp. 1210–1218. [Google Scholar] [CrossRef]
- Hu, B.; Mishra, S. A time-optimal trajectory generation algorithm for quadrotor landing onto a moving platform. In Proceedings of the American Control Conference, Seattle, WA, USA, 24–26 May 2017; pp. 4183–4188. [Google Scholar] [CrossRef]
- Shi, G.; Shi, X.; O’Connell, M.; Yu, R.; Azizzadenesheli, K.; Anandkumar, A.; Yue, Y.; Chung, S.J. Neural lander: Stable drone landing control using learned dynamics. In Proceedings of the IEEE International Conference on Robotics and Automation, Tianjin, China, 20–24 May 2019. [Google Scholar] [CrossRef] [Green Version]
- Danjun, L.; Yan, Z.; Zongying, S.; Geng, L. Autonomous landing of quadrotor based on ground effect modelling. In Proceedings of the Chinese Control Conference, CCC, Bunkyo-Ku, Tokyo, 28–30 July 2015. [Google Scholar] [CrossRef]
- Noor, M.B.; Ismail, M.A.; Khyasudeen, M.F.; Shariffuddin, A.; Kamel, N.I.; Azzuhri, S.R. Autonomous Precision Landing for Commercial UAV: A Review; Frontiers in Artificial Intelligence and Applications; IOS Press: Amsterdam, The Netherlands, 2017. [Google Scholar] [CrossRef]
- Wubben, J.; Fabra, F.; Calafate, C.T.; Krzeszowski, T.; Marquez-Barja, J.M.; Cano, J.C.; Manzoni, P. Accurate landing of unmanned aerial vehicles using ground pattern recognition. Electronics 2019, 8, 1532. [Google Scholar] [CrossRef] [Green Version]
- Acuna, R.; Carpio, R.M.; Willert, V. Dynamic Markers: UAV landing proof of concept. In Proceedings of the Computer Science, Engineering 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), 2018, Joao Pessoa, Brazil, 6–10 November 2018; pp. 496–502. [Google Scholar]
- Hoeller, D.; Ledergerber, A.; Hamer, M.; D’Andrea, R. Augmenting Ultra-Wideband Localization with Computer Vision for Accurate Flight. IFAC-PapersOnLine 2017, 50, 12734–12740. [Google Scholar] [CrossRef]
- Janousek, J.; Marcon, P. Precision landing options in unmanned aerial vehicles. In Proceedings of the 2018 International Interdisciplinary PhD Workshop, IIPhDW 2018, Swinoujście, Poland, 9–12 May 2018. [Google Scholar] [CrossRef]
- Marcon, P.; Janousek, J.; Kadlec, R. Vision-Based and Differential Global Positioning System to Ensure Precise Autonomous Landing of UAVs. In Proceedings of the Electromagnetics Research Symposium, Toyama, Japan, 1–4 August 2018. [Google Scholar] [CrossRef]
- Air Robot Onboard Battery Charging System. RU Patent 135469-U1, 10 December 2013.
- Xiaofang, G. A Kind of SUAV Catapult-Launching Gear. CN Patent 107364587-A, 9 August 2017. [Google Scholar]
- Minnick, D.J.; Goldey, J.; Michel, K.; DeWhitt, S.; Jonesm, K.; Mann, J. Systems and Methods for Uav Docking and Recharging. U.S. Patent 20180237161-A1, 23 August 2018. [Google Scholar]
- Wenqing, L. A Kind of Contact Unmanned Plane Automatic Charge Device. CN Patent 205811623-U, 14 December 2016. [Google Scholar]
- Stoyanov, Y.P. Method for Charging Accumulator Batteries of Unmanned Aerial Vehicles. RU Patent 2593207-C1, 23 June 2015. [Google Scholar]
- DJI S1000|WiBotic. Available online: https://www.wibotic.com/products/s1000 (accessed on 6 February 2020).
- Outdoor Charging Pad—Skysense—High Power Drone Charging Pad and Infrastructure. Available online: https://www.skysense.co/charging-pad-outdoor (accessed on 6 February 2020).
- Edronic—Drone Charging Station for Automated drone operations. Available online: https://www.edronic.com (accessed on 6 February 2020).
- Hanmin, X.; Yuanzhi, Z.; Baiman, C.; Liangjiu, Y.; Weicai, P.; Yihong, W.; Jianjin, L.; Shuo, Z.; Yujie, S. A Kind of Unmanned Plane Charging System and Charging Streetlamp. CN Patent 206226087U, 6 June 2017. [Google Scholar]
- Hao, Z. Unmanned Plane Interface Automatic Butt System. CN Patent 205790709-U, 7 December 2016. [Google Scholar]
- Method for Producing Complex of Manganese Dioxide and Carbon Nanofiber and Pseudo Capacitor Including the Complex. KR Patent 101126784-B1, 25 September 2009.
- Godzdanker, R.; Valavanis, K.P.; Rutherford, M.J. Intelligent Self-Leveling Docking System. U.S. Patent 20140124621-A1, 8 May 2014. [Google Scholar]
- Zhongjing, Y.Y.Z.; Zhang, S.C.; Mengyin, K.F. A Kind of Vehicle-Mounted Landing Fixed Platform of Rotary Wind Type Unmanned Plane. CN Patent 106904288-B, 30 June 2017. [Google Scholar]
- Magaña, E.J.C.; Esteban-Campillo, D.; Maza, D.S.J.; Caballero, F. Device and Method for Use with Unmanned Aerial Vehicles. U.S. Patent 20140319272-A1, 30 October 2014. [Google Scholar]
- EWATT UAV|California|Ewatt Aerospace. Available online: https://www.ewattuav.com (accessed on 6 February 2020).
- COEX Pelican—Autonomous Drone for Monitoring and Delivery. Available online: https://coex.tech/pelican (accessed on 6 February 2020).
- Autonomous Transportation Systems Lab—Innopolis University. Available online: https://robotics.innopolis.university/en/labs/laboratoriya-avtonomnyh-transportnyh-sistem (accessed on 6 February 2020).
- Matternet Unveils the New Matternet Station. Available online: https://mttr.net (accessed on 20 May 2020).
- Fox, Y.; Meir, K.; Ran, K. Positioning and Locking System and Method for Unmanned Vehicles. WO Patent 2017221235-A1, 20 June 2016. [Google Scholar]
- Liu, W.; Daoguang, Z. A Kind of Unmanned Plane Recharging Platform. CN Patent 106542109-A, 4 November 2016. [Google Scholar]
- Shizhou, L.; Xuguang, D.; Yuankai, R.; Jie, M.; Qifan, T.; Qingyu, S.; Tong, W. A Kind of Unmanned Plane Relay. CN Patent 206485585-U, 24 February 2017. [Google Scholar]
- Cheng, H.C.; Chen, Y.C.; Hsieh, C.T. Charge Device for a Drone. U.S. Patent 10079497-B2, 18 September 2018. [Google Scholar]
- Wei, W.; Wei, H.; Haifei, Z. Unmanned Aerial Vehicle System. CN Patent 204096090-U, 21 August 2014. [Google Scholar]
- Automated Industrial Drones|Airobotics. Available online: https://www.airoboticsdrones.com (accessed on 6 February 2020).
- Coretronic Intelligent Robotics (CIRC). Available online: https://www.coretronic-robotics.com (accessed on 6 February 2020).
- Yang, C. Unmanned Plane Rises and Falls Platform and Unmanned Plane Take-Off and Landing Device. CN Patent 207748039-U, 21 August 2018. [Google Scholar]
- Easy Aerial. Available online: https://easyaerial.com (accessed on 6 February 2020).
- Stamatovski, I. Unmanned Aerial Vehicle Charging Station with Centering Mechanism. U.S. Patent 20180148170-A1, 31 May 2018. [Google Scholar]
- Gabdullin, A.R.; Galimov, M.M.; Klimchik, A.S. Landing Platform for Uav Vertical Take-Off and Landing. RU Patent 2722249C1, 16 July 2019. [Google Scholar]
- Antonini, R.; Fici, G.P.; Gaspardone, M. Landing Platform for an Unmanned Aerial Vehicle. U.S. Patent 20170217323-A1, 3 August 2017. [Google Scholar]
- Three-Phase AC Power Wirelessly-Chargable Unmanned Aerial Vehicle and Three-Phase AC Power Wirelessly-Charging Apparatus for the Same. KR Patent 101858619-B1, 24 August 2016.
- Zhu, X.H.; Biao, X.J. A Kind of Unmanned Plane Charging Device. CN Patent 206685921-U, 28 November 2017. [Google Scholar]
- Mingxi, W. Systems and Methods for UAV Battery Exchange. U.S. Patent 9139310-B1, 8 August 2014. [Google Scholar]
- Samojlovskij, A.A.; Soloshenko, V.N.; Molostov, D.G. Base Station for Unmanned Aerial Vehicles. RU Patent 2670368-C1, 22 October 2018. [Google Scholar]
- Gabdullin, A.R.; Galimov, M.M.; Klimchik, A.S. Landing Place for Drone. RU Patent 2710887C1, 29 April 2019. [Google Scholar]
- Kim, B.K.; Kim, H.S.; Lee, D.H. Local Data Serviceable Control Station, Dock Rechargeable UAV and the Operating System Thereof. KR Patent 20170104186-A, 7 March 2016. [Google Scholar]
- Barbasov, K.V.; Barbasov, V.K. System of Landing of Unmanned Aerial Vehicle and Landing Vehicle of Vertical Take-Off and Landing. RU Patent 2666975-C1, 22 November 2017. [Google Scholar]
- The Skydio 2 Dock Aims to Make Fully Autonomous Workflows a Reality—Dronelife. Available online: https://dronelife.com/2019/10/16/the-skydio-2-dock-aims-to-make-fully-autonomous-workflows-a-reality (accessed on 6 February 2020).
- Sunflower Labs|Autonomous Home Security Drone. Available online: https://www.sunflower-labs.com (accessed on 6 February 2020).
- Rodriguez, C.A.S. Landing Platform for an Unmanned Aerial Vehicle. U.S. Patent 805018S1, 18 June 2016. [Google Scholar]
- Krauss, R.; Kliner, M. Centering and Landing Platform for Hovering Flying Vehicles. WO Patent 2017130181-A1, 3 August 2017. [Google Scholar]
- Van der Vaeren, S.; Bossens, M. Unmanned Aerial Vehicle Landing System. EP Patent 3326912-A1, 24 November 2016. [Google Scholar]
- Penet, T.H.M.M.; Marliave, G.D.; Dubois, O.B.F. System Comprising a Drone, a Wire, and a Receiver Station, Providing Self-Contained Landings of the Drone in Degraded Condition. FR Patent 3059647-A1, 2 February 2016. [Google Scholar]
- Pounds, P.E.I. Vehicle Replenishment. U.S. Patent 20150069968-A1, 12 March 2015. [Google Scholar]
- Sanz, C.; Miller, S.G.; Noorani, J.S.; Sirang, B. Unmanned Aerial Vehicle Landing Interface. U.S. Patent 20160001883-A1, 22 November 2016. [Google Scholar]
- Mozer, R.A. Drone Aircraft Landing and Docking Systems. U.S. Patent 20170073084-A1, 16 March 2017. [Google Scholar]
- Ramanathan, S. UAV Docking System and Method. U.S. Patent 9561871-B2, 7 May 2014. [Google Scholar]
- Afanasev, I.M.; Galimov, M.M.; Lipatov, A.N. Automatic Station for Charging and Servicing of Unmanned Aerial Vehicles and Unmanned Aerial Vehicle Operating Therewith. Patent RU 2721048C1, 29 April 2019. [Google Scholar]
- SEO, K.S. Automatic Charging System for Unmanned Aerial Vehicle. KR Patent 20180050069-A, 4 November 2016. [Google Scholar]
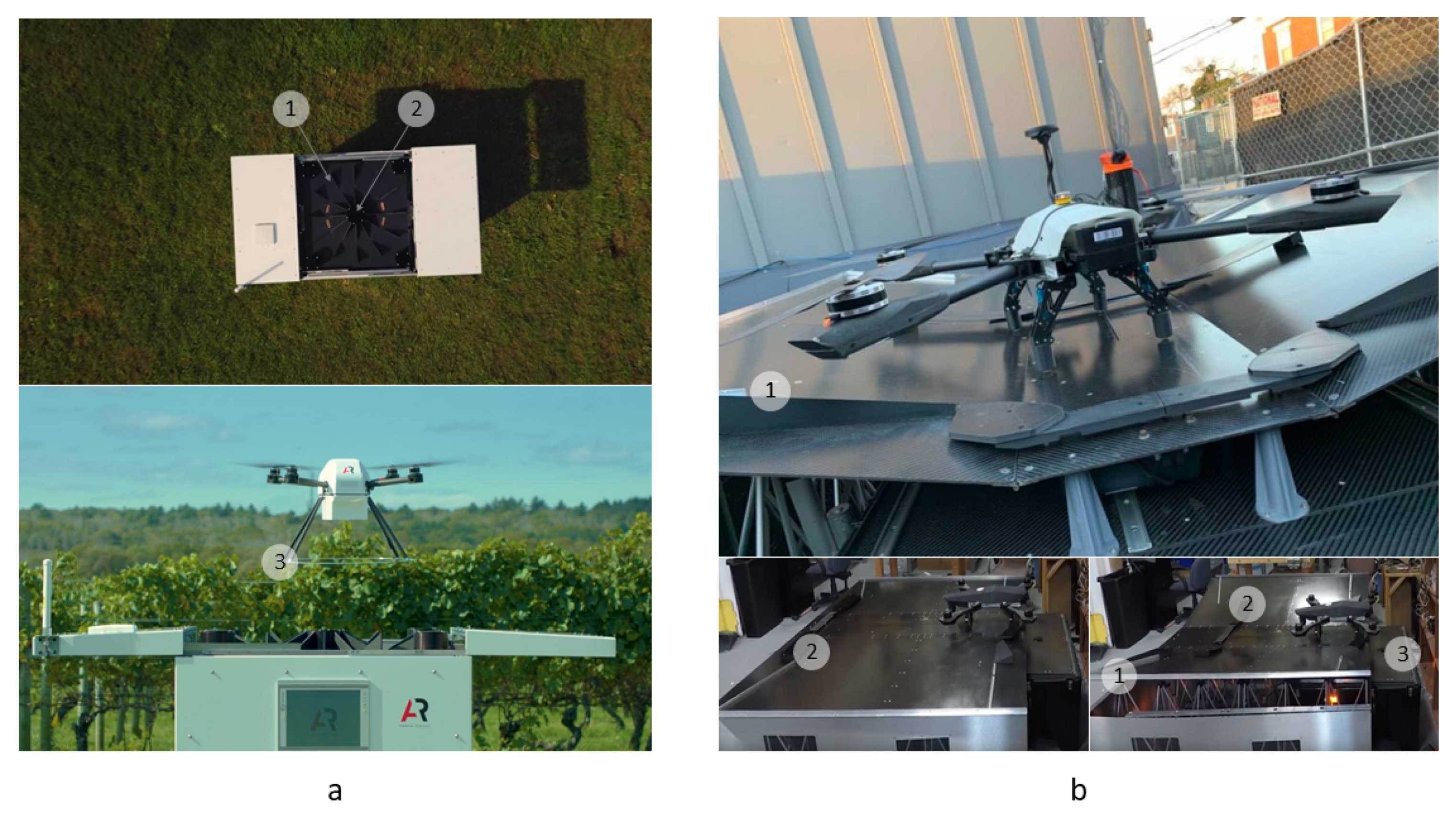
- American Robotics|Fully-Automated Drones. Available online: https://www.american-robotics.com (accessed on 6 February 2020).
- DroneCore|ASYLON. Available online: https://www.flyasylon.com (accessed on 6 February 2020).
- Mingxi, W.; Hanping, C.; Xiangyu, C.; Yuan, L. Positioning Mechanism and UAV (Unmanned Aerial Vehicle) Base Station Using Positioning Mechanism. CN Patent 204250382-U, 19 November 2014. [Google Scholar]
- Unmanned Aircraft Take-Off and Landing Platform. JP Patent 6228706-B1, 8 November 2017.
- Zhang, X.; Gao, S. Apron Platform, Unmanned Aerial Vehicle Base Station, and Unmanned Aerial Vehicle Landing Method and System. WO Patent 2019061533-A1, 30 September 2017. [Google Scholar]
- Koster, K.L. Delivery Platform for Unmanned Aerial Vehicles. U.S. Patent 20150175276-A1, 25 June 2015. [Google Scholar]
- Sullivan, R.M.; Williams, P.S.; Prokhorov, D.V. Systems for Transporting, Deploying, and Docking Unmanned Aerial Vehicles Mountable on a Ground Vehicle. U.S. Patent 20180009549-A1, 11 January 2018. [Google Scholar]
- Bing, Z.; Wenlin, W. Electric Power Remote Line Walking Unmanned Plane Charging Station. CN Patent 205811594-U, 24 June 2016. [Google Scholar]
- Beom-Soo, K.; Song, W.-J.; Tae-Wan, K.U.; Young-Seop, B.Y.U.N. Unmanned Aerial Vehicle Having Spherical Loading Portion and Unmanned Ground Vehicle Therefor. U.S. Patent 20110068224-A1, 24 March 2011. [Google Scholar]
- Strobel, A. Ducted Fan Unmanned Aerial Vehicle Docking Station. WO Patent 2018039784A1, 8 March 2018. [Google Scholar]
- Beardsley, P.A.; Eriksson, M.; Alonso-Mora, J.; Rehder, J. Robust and Autonomous Docking and Recharging of Quadrotors. U.S. Patent 20160039541-A1, 11 February 2016. [Google Scholar]
- Stabler, B.S.; Hall-Snyder, N.; Doersch, P.; Hammond, M. Systems and Methods for Unmanned Aerial Vehicle Landing. U.S. Patent 10124908-B2, 21 October 2013. [Google Scholar]
- Mozer, R.A. Drone Aircraft Landing and Docking Systems. U.S. Patent 10287034-B2, 2 March 2015. [Google Scholar]
- Pilskalns, O.J. Autonomous System for Unmanned Aerial Vehicle Landing, Charging and Takeoff. U.S. Patent 20170050749-A1, 23 February 2017. [Google Scholar]
- Galimov, M.M. Active Ring Landing Platform for UAV. RU Patent 2020-XXXXX; (pending), 2020. [Google Scholar]
- Marshall, P.T. Power Line Sentry Charging. U.S. Patent 7318564-B1, 4 October 2004. [Google Scholar]
- McNally, J. Method for Installing an Object Using an Unmanned Aerial Vehicle. U.S. Patent 20160023761-A1, 28 January 2016. [Google Scholar]
- Goossen, E.R.; Sheoran, Y.Y. Launch and Capture Systems for Vertical Take-Off and Landing (VTOL) Vehicles. U.S. Patent 8162256B2, 24 September 2009. [Google Scholar]
- Wright, C. Unmanned Aerial Vehicle (UAV) Recharging/Refuelling Station. U.S. Patent 20190100331A1, 4 April 2019. [Google Scholar]












































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 No positioning | |||||||||||
| Pros: simple and robust, because there are no actuators and mechanical moving parts Cons: the UAV and its electrical contacts are not fixed at the landing site; the UAV may move out of position and lose its electrical contact, or it may land on one electrical contact with opposing polarity contacts | |||||||||||
 |  |  | |||||||||
| 1.1 Landing site divided into two parts with rectangular contacts Pros: simple | 1.2 Alternating electrodes Pros: the large number of contacts eliminates the requirement for the accuracy of UAV landing | 1.3 Vertical separation Pros: the UAV is charged regardless of the accuracy of landing; different contacts are separated | |||||||||
| 2 Active positioning | |||||||||||
| Pros: fixes the UAV (in the wind, on a moving platform); operation is not affected by the accuracy of the UAV’s landing (in the area of the landing site) Cons: has moving parts and actuators; positioning and fixing should be automatically controlled | |||||||||||
 |  |  |  | ||||||||
| 2.1 Parallel pushers Pros: are suitable for use with UAVs of different sizes | 2.2 Profile (V,W) pushers Pros: reducing the number of pushers; positioning both in the direction of the movement of the pushers and orthogonal Cons: is suitable for use only with UAVs of a given size and number of legs | 2.3 Rotating pushers Pros: reducing the number of pushers Cons: is suitable for use only with UAVs of a given size and number of legs; does not fix the UAV | 2.4 Diaphragms Pros: could be configured for UAVs of different sizes and number of legs; quick fixing of the UAV | ||||||||
| 3 Passive funnels | |||||||||||
| Pros: simple; no actuators or moving devices; passive positioning simultaneously with landing Cons: usually has a small landing site; requires better landing precision; could be unreliable in difficult landing conditions (on a movable platform, under vibration, wind, landing with horizontal speed or with an angle) | |||||||||||
 |  |  |  | ||||||||
| 3.1 Under each leg Cons: suitable only for a given UAV leg configuration; needs a high payload mount | 3.2 One for all legs Most used type Pros: suitable for a UAV with a low payload mount | 3.3 For the whole UAV body Pros: no legs needed; the landing platform could be used as a storage container | 3.4 Overhead Pros: self-stabilization (centering) during docking; possibility of non-standard installation (on street lights, etc.) | ||||||||
| 4 Closed contours | |||||||||||
| Pros: Simple; no actuators or moving devices for positioning; passive positioning simultaneously with landing; simplified UAV construction (no UAV legs are needed); the UAV center of mass is below the fixation point; could be used with a UAV with low payload mounting; lower landing precision is usually required (comparing with funnels) Cons: UAV modification is usually needed to land on a closed contour | |||||||||||
 |  |  | |||||||||
| 4.1 Corona | 4.2 Track | 4.3 Circle Pros: Reversed landing sequence: fix first and positioning after | |||||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galimov, M.; Fedorenko, R.; Klimchik, A. UAV Positioning Mechanisms in Landing Stations: Classification and Engineering Design Review. Sensors 2020, 20, 3648. https://doi.org/10.3390/s20133648
Galimov M, Fedorenko R, Klimchik A. UAV Positioning Mechanisms in Landing Stations: Classification and Engineering Design Review. Sensors. 2020; 20(13):3648. https://doi.org/10.3390/s20133648
Chicago/Turabian StyleGalimov, Musa, Roman Fedorenko, and Alexander Klimchik. 2020. "UAV Positioning Mechanisms in Landing Stations: Classification and Engineering Design Review" Sensors 20, no. 13: 3648. https://doi.org/10.3390/s20133648
APA StyleGalimov, M., Fedorenko, R., & Klimchik, A. (2020). UAV Positioning Mechanisms in Landing Stations: Classification and Engineering Design Review. Sensors, 20(13), 3648. https://doi.org/10.3390/s20133648