Foot-Mounted Pedestrian Navigation Method by Comparing ADR and Modified ZUPT Based on MEMS IMU Array


Abstract
:1. Introduction
- (1)
- Aiming at the problem that the MLE method for fusing IMU array data has difficulty balancing reasonably the influence exerted by every IMU to the pedestrian navigation accuracy, a fusion scheme of IMU with large drift error elimination using the position calculated by each IMU is proposed in this paper.
- (2)
- In order to further improve the estimation accuracy of the position in the traditional ZUPT filtering model, the position estimator is extracted from its filtering model using adaptive dead reckoning based on LS to carry out the independent estimation.
2. ADR/ZUPT Integrated Framework Based on Adaptively Fusing Foot-Mounted IMU Array
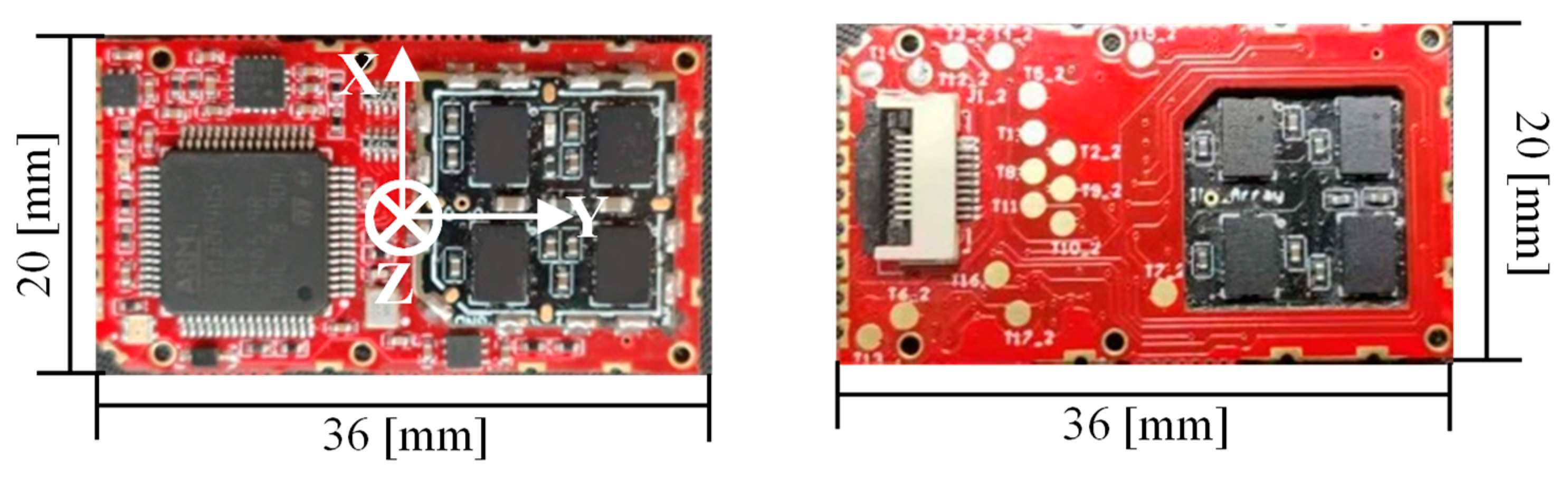
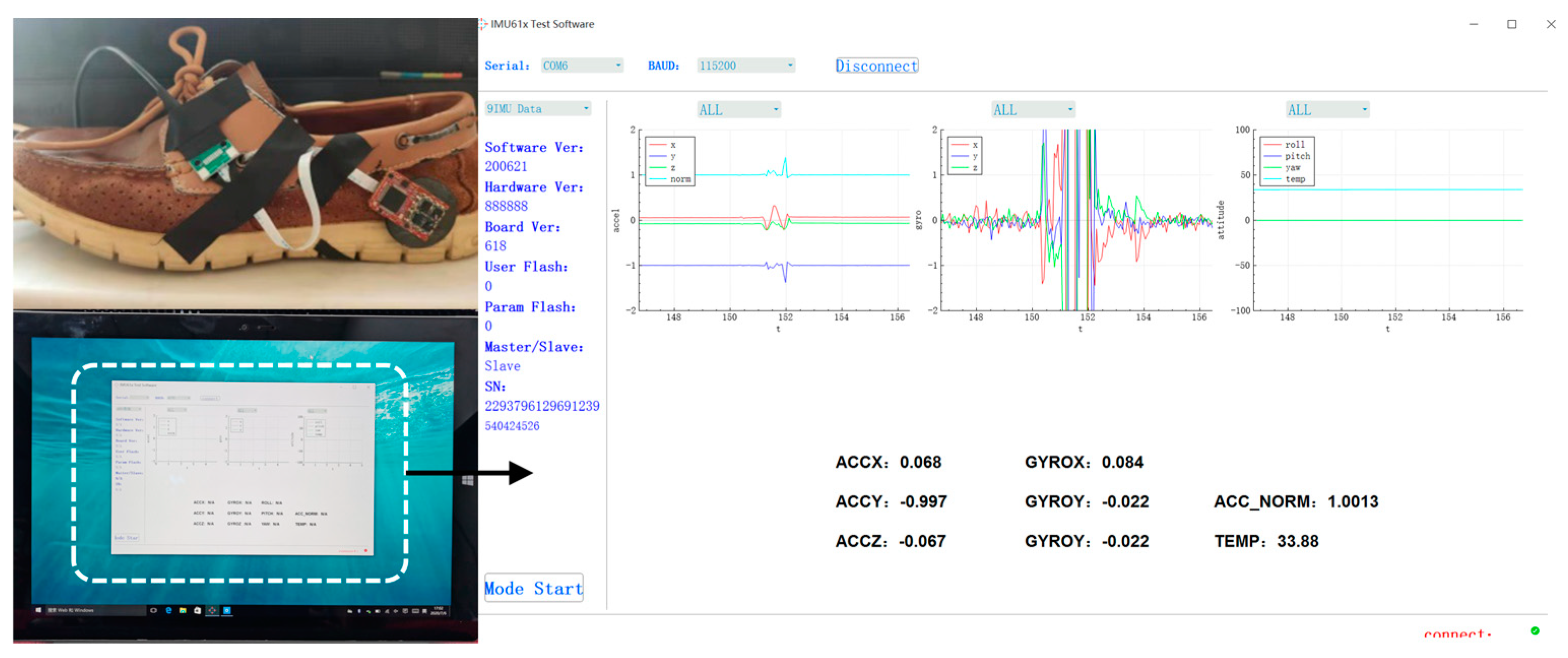
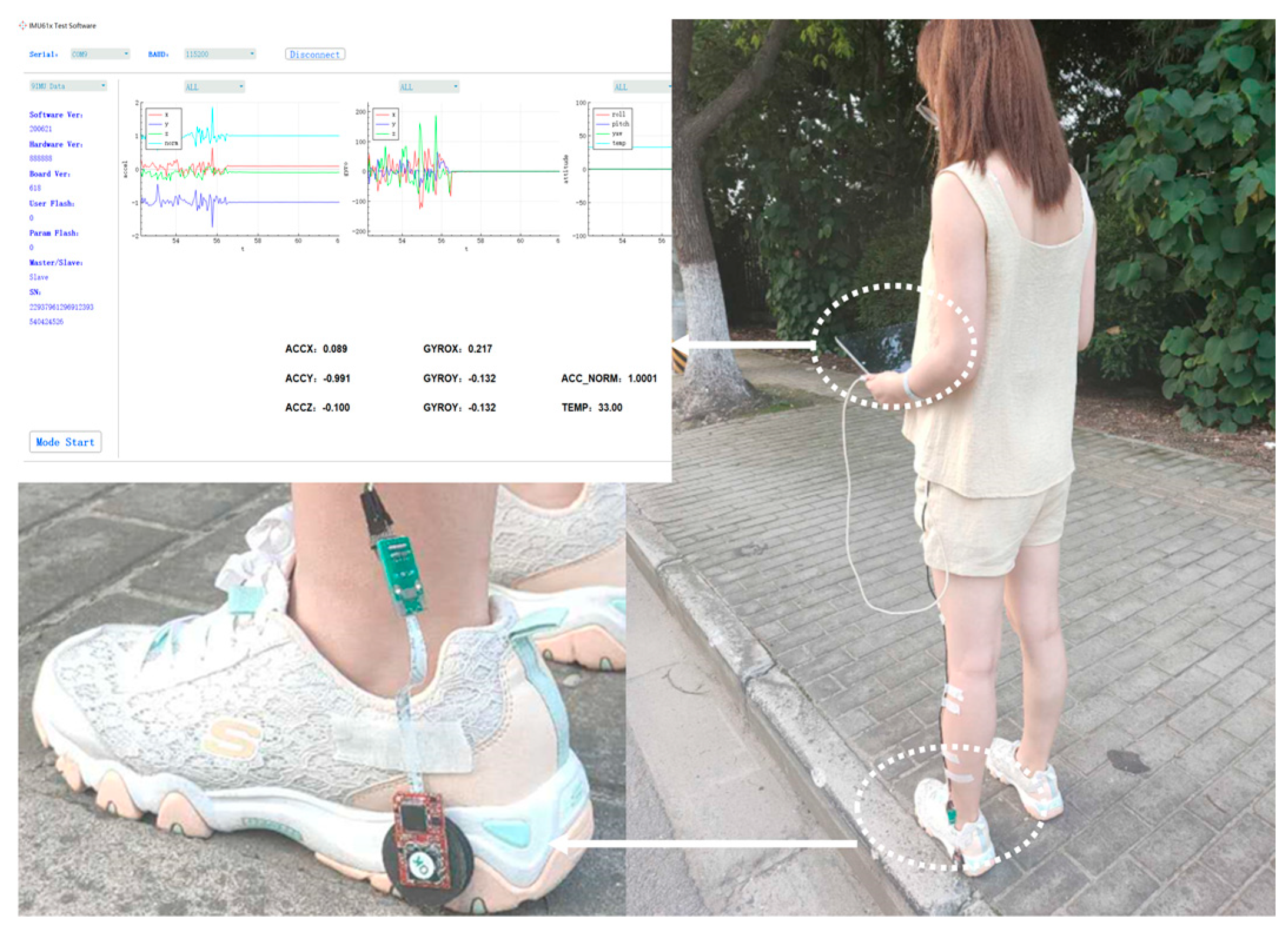
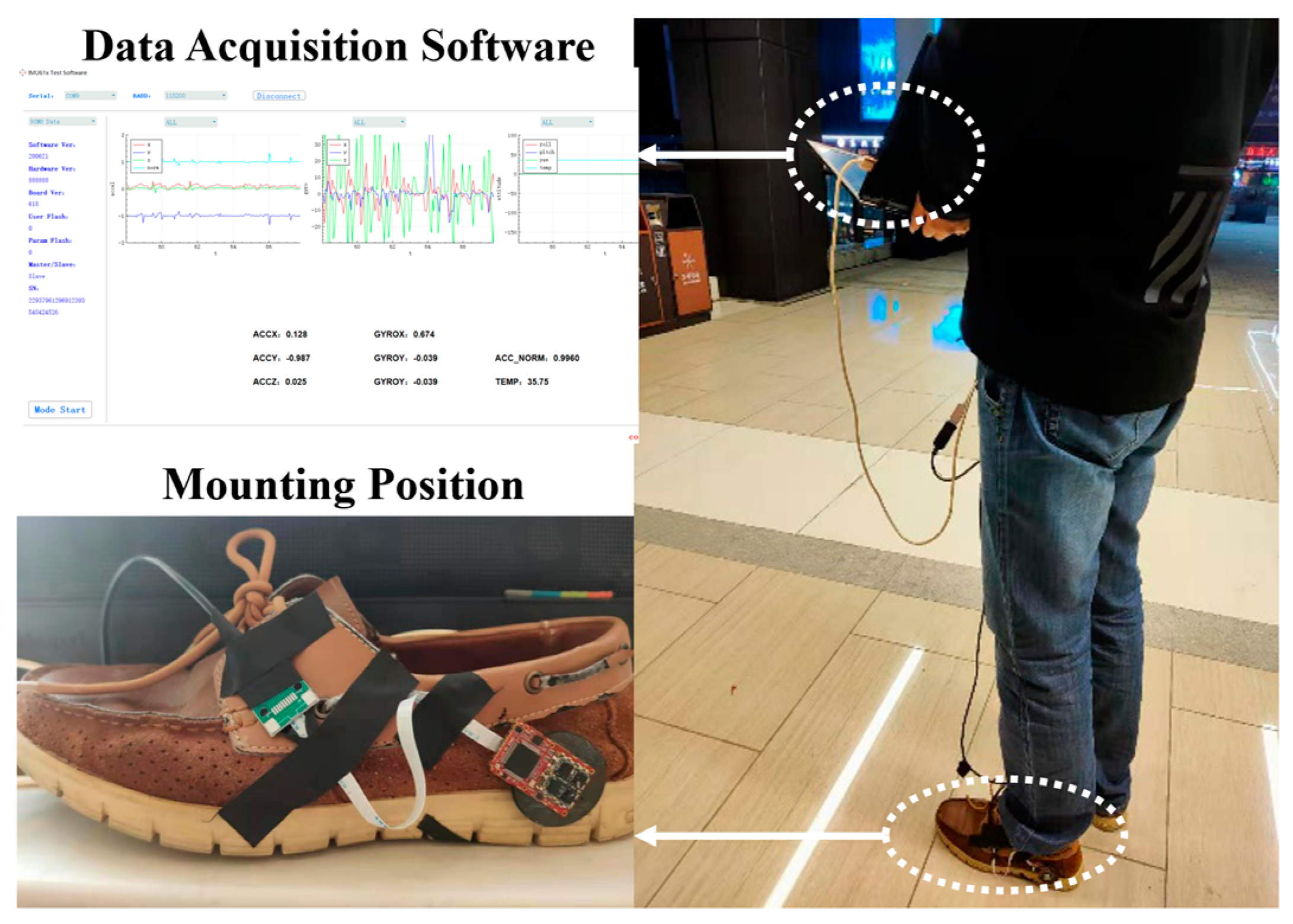
2.1. In-House Developed MEMS IMU Array
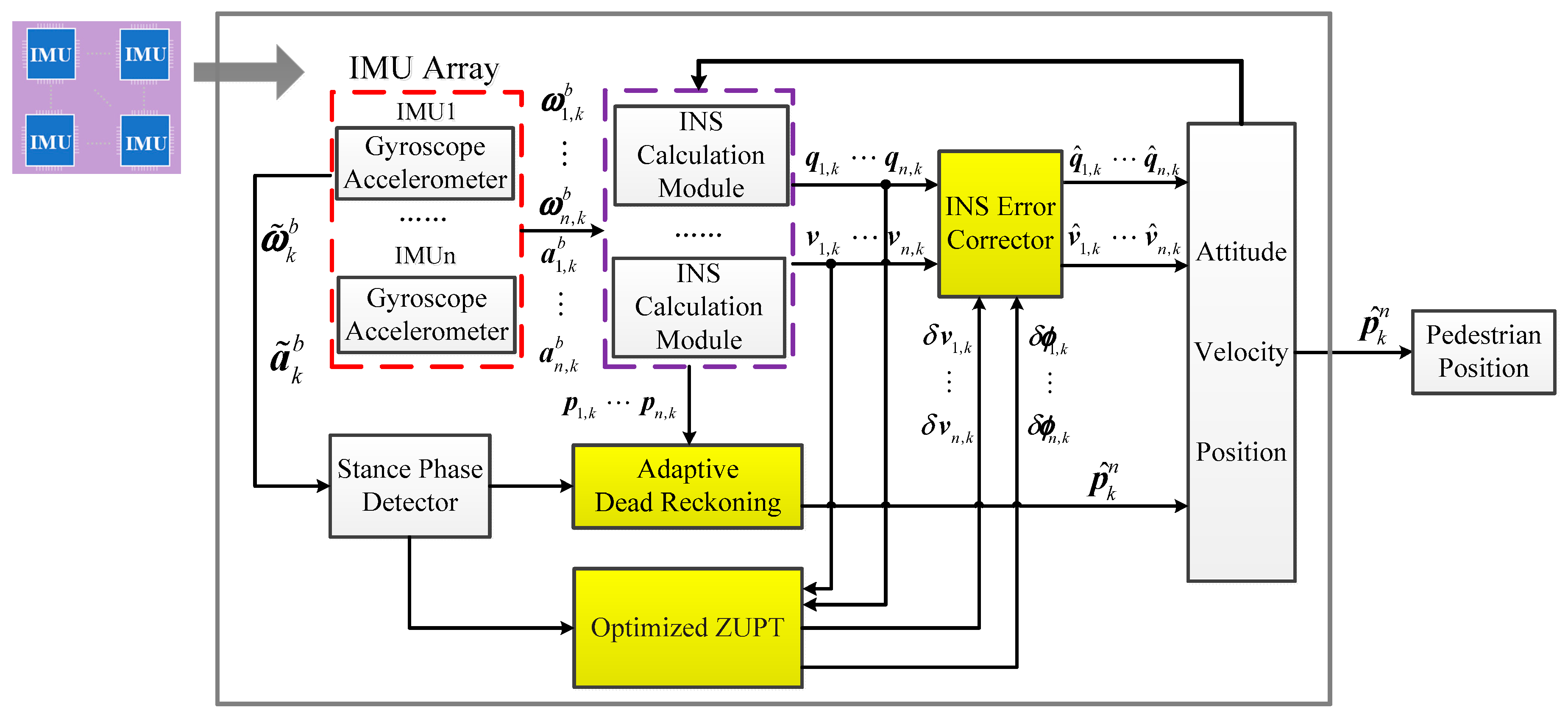
2.2. ADR/ZUPT Integrated Algorithm Structure
- (1)
- Adaptive dead reckoning module: As the traditional ZUPT filter model observes the position error weakly, the paper separates the position error from the filter model and fuses the IMU array redundant measurements to estimate the pedestrian position by applying the dead reckoning algorithm. In order to reasonably weight the IMU measurements to attain better position fusion performance, the paper proposes an adaptive dead reckoning (ADR) algorithm based on least squares (LS) to estimate the pedestrian position, which is detailed in the next section.
- (2)
- Optimized ZUPT module: The traditional ZUPT module uses the Kalman filter as an indirect filter to estimate the errors of the raw INS states. As the position is estimated in the adaptive dead reckoning module separately, the optimized ZUPT process filter model only contains the velocity error and the attitude error . An individual optimized ZUPT module is established for each IMU of the array. Since the sampling period is very small, the continuous-time error model of i: th IMU can be discretized aswhere , is a 6 × 6 identity matrix, and . is zero mean white noise with covariance matrix . Since the noise of accelerometers and gyroscopes in our designed system is respectively 0.01 m/s2 and 0.005 rad/s, is a 6 × 6 diagonal matrix with diagonal elements as .The measurement model of i:th IMU can be expressed aswhere and the measurement matrix . The measurement noise is zero mean white noise with covariance matrix . is set to be a 3 × 3 diagonal matrix with elements as based on experimental results.
- (3)
- INS error corrector: The error corrector utilizes the error estimates to refine the raw INS states and suppress the cumulative divergence error. Different from the INS error corrector in the traditional ZUPT, such a module only corrects attitude and velocity errors. The error corrector model of the i:th IMU is given bywhere is the corrected attitude matrix, is the corrected attitude quaternion, is the skew-symmetric matrix of , and is the corrected velocity.
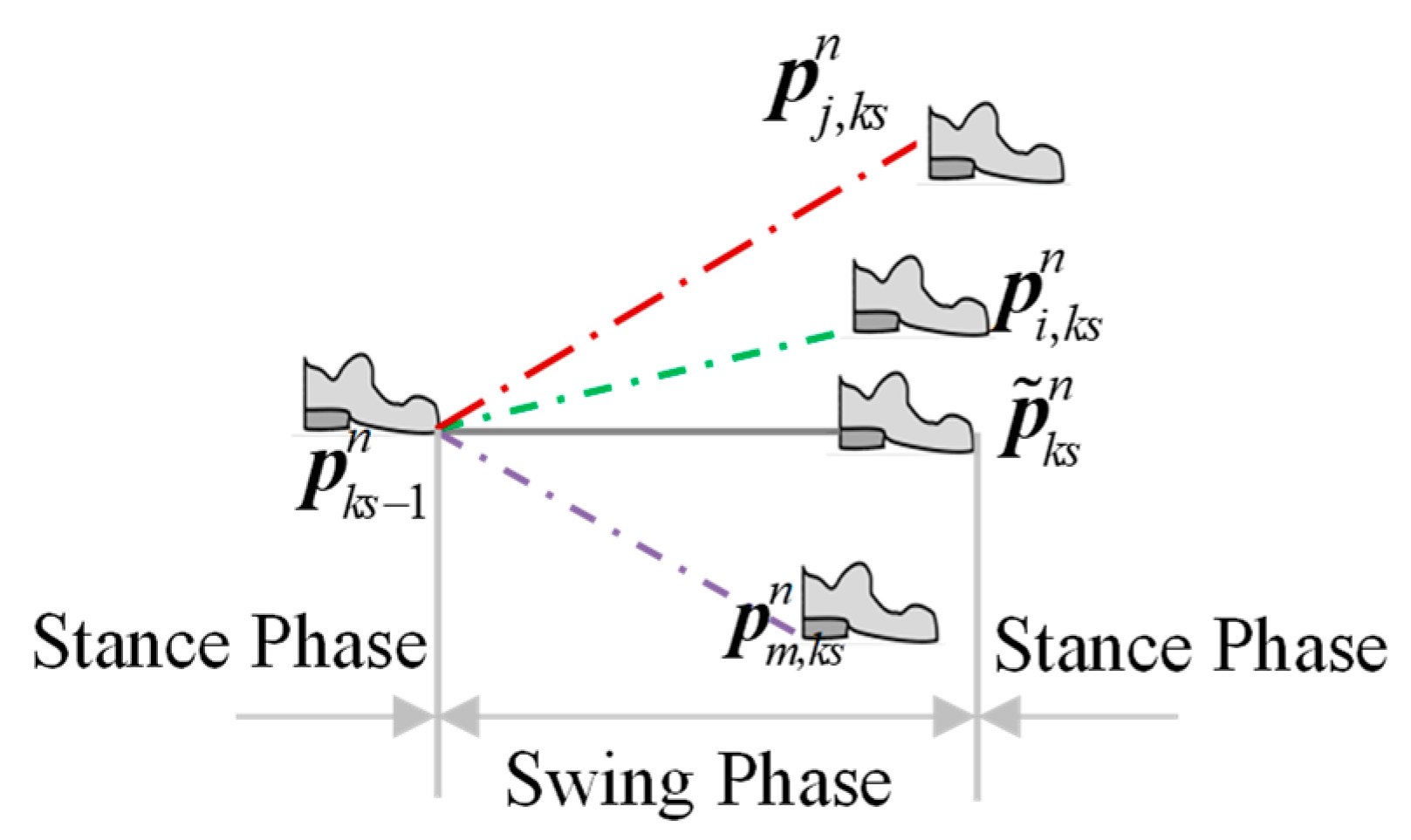
2.3. Position Estimation by Adaptive Dead Reckoning Based on IMU Array
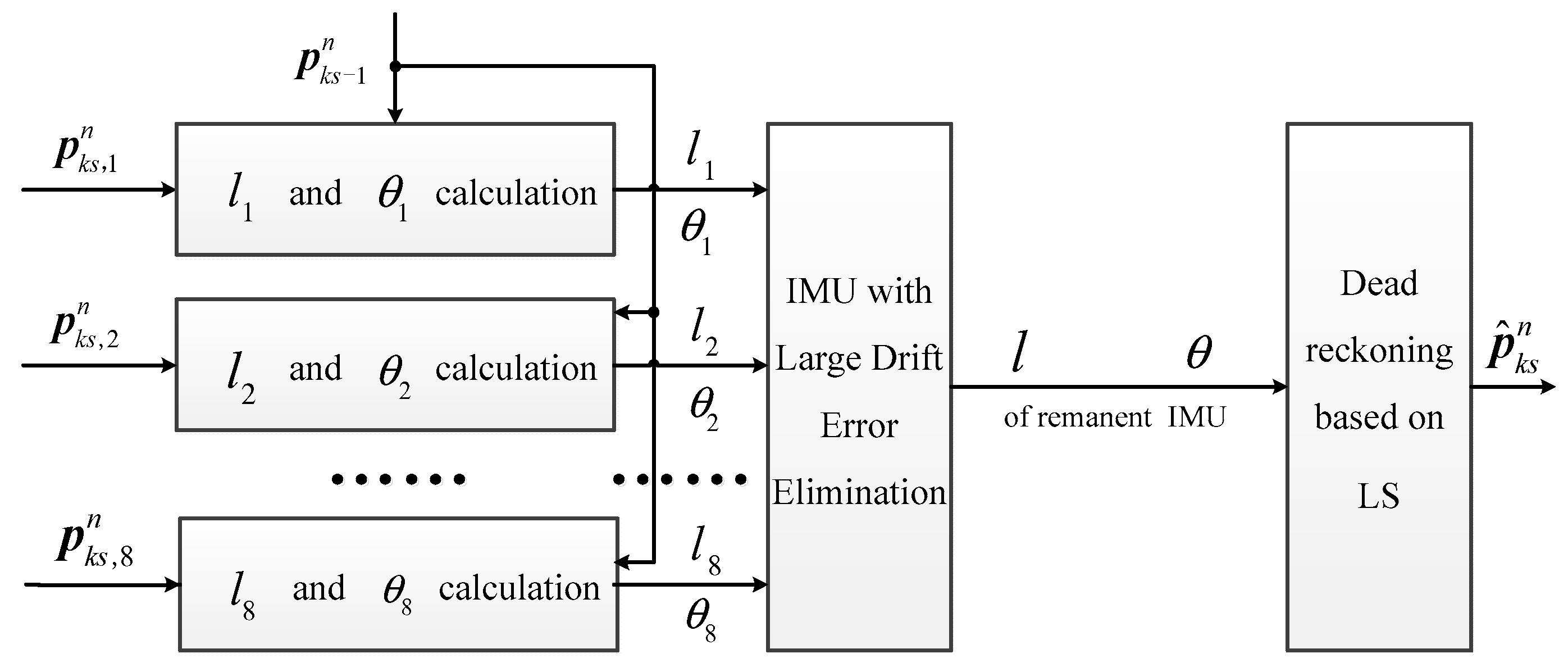
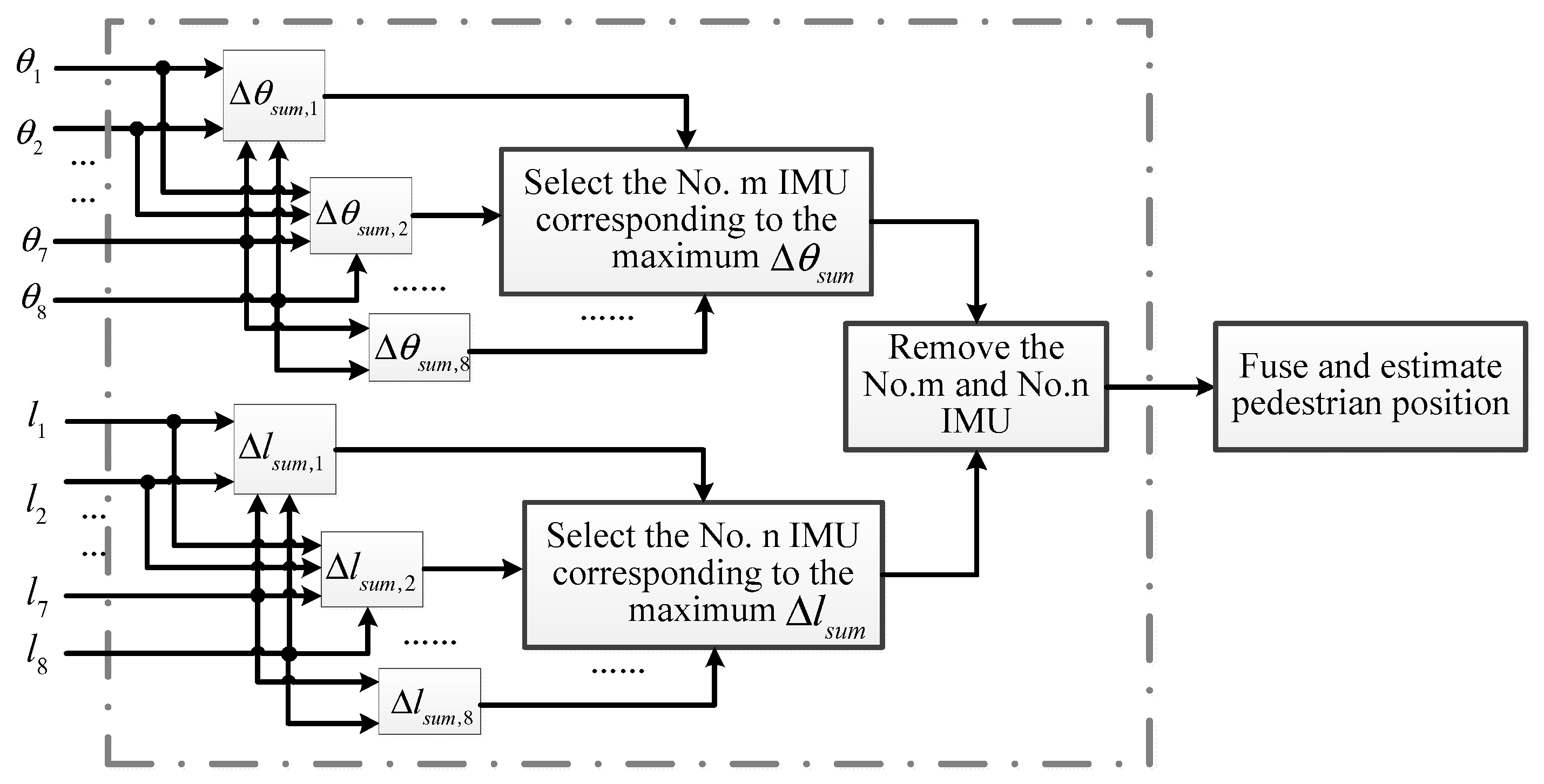
2.3.1. Elimination of IMU with Large Drift Errors
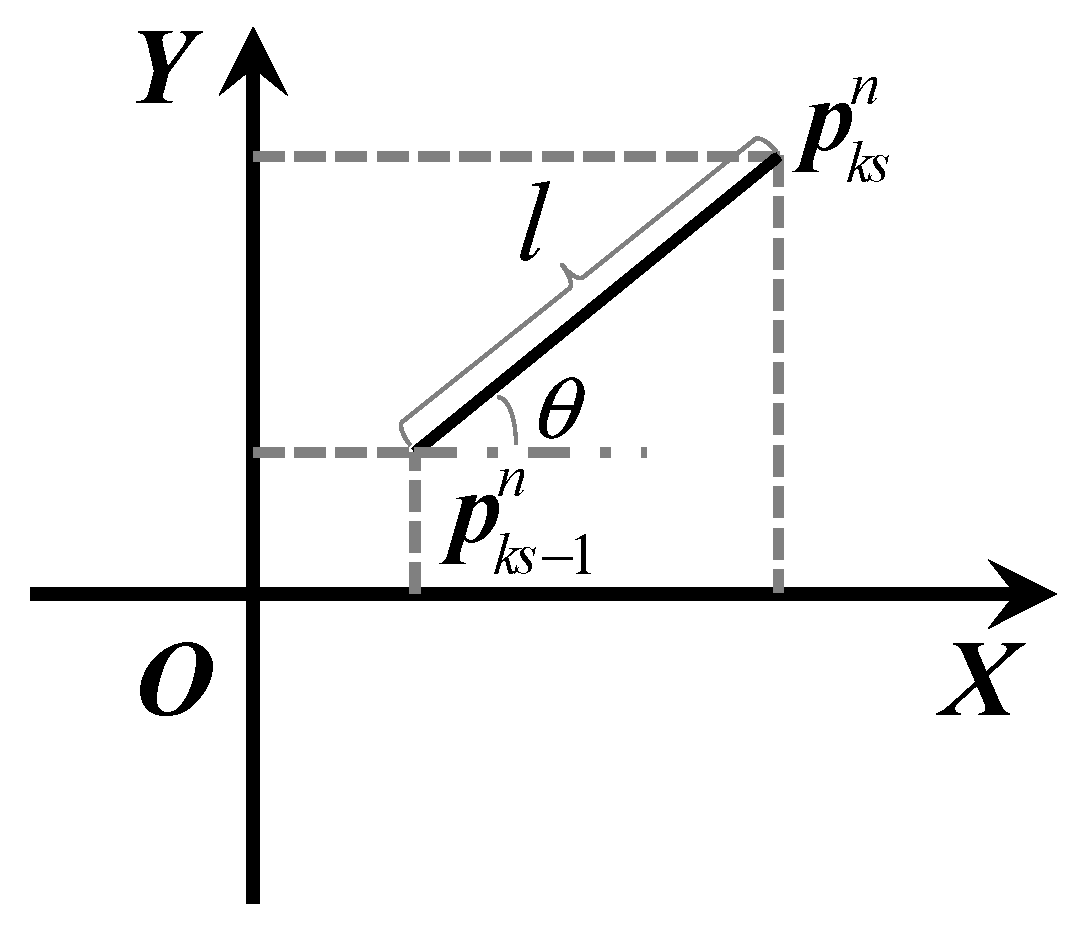
2.3.2. Dead Reckoning Based on Least Squares
3. Experiments and Analysis
3.1. Straight Line Experiments
- (a)
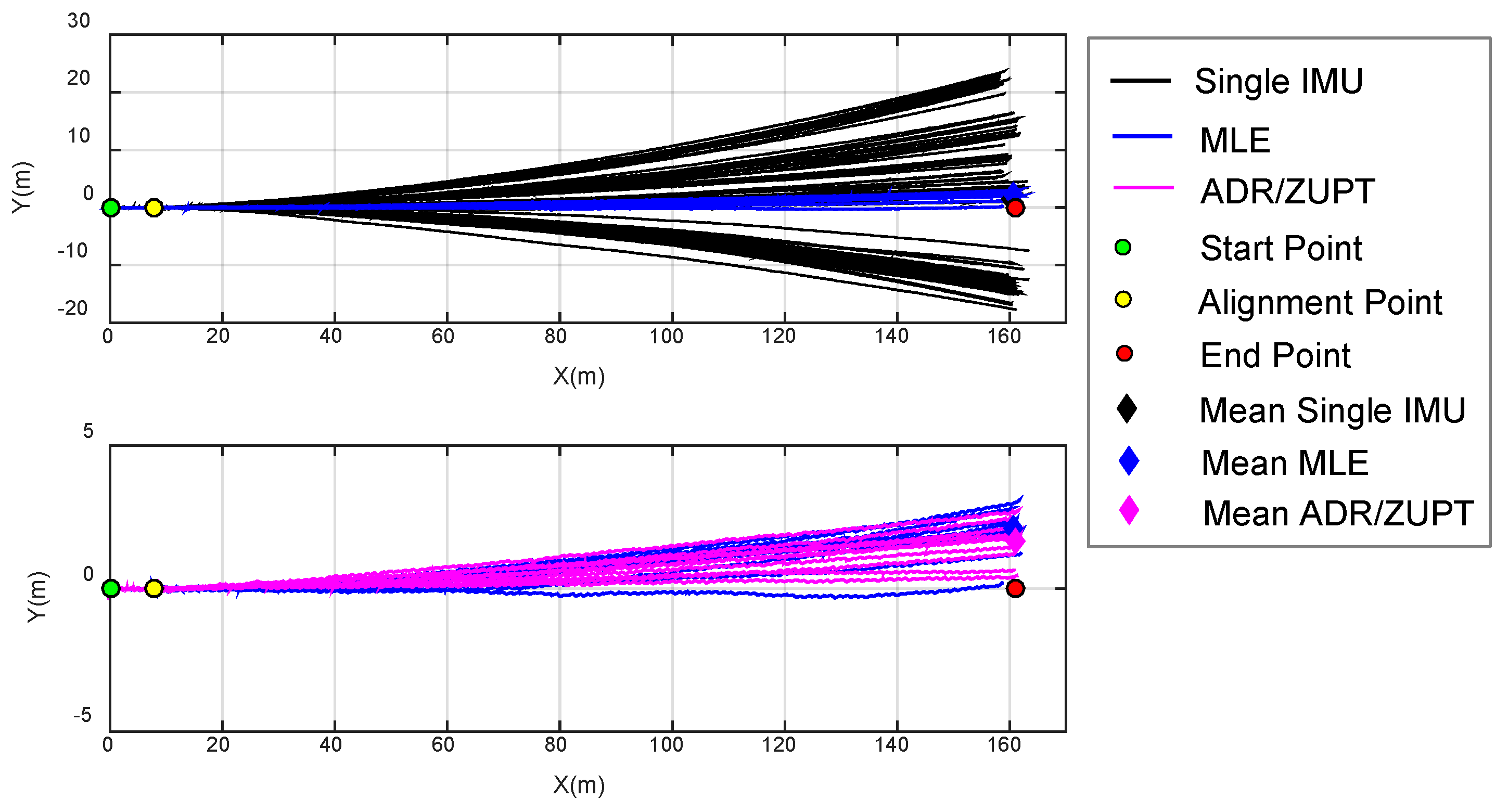
- The 10 walking tracks symmetrically diverge based on the reference trajectory, which demonstrates that deterministic errors of single IMU on the array are effectively calibrated and compensated.
- (b)
- Although the bias of each IMU is deducted online after powering on, online drift errors still exist in the process, and the drift errors of each IMU differ from each other, which results in the difference in the estimated walking track. The maximum drift error is about 25 m in the vertical direction of walk trajectories.
- (c)
- Due to the randomness of the drift errors of each IMU at different times, their calculated tracks sometimes get close and sometimes depart from the ideal track. Therefore, it is required to make adaptive comparison of drift errors according to the calculated position of each IMU at different times, which verifies the rationality of the adaptive elimination method of IMU with large drift errors in the ADR/ZUPT integrated framework.
- (d)
- There is clearly a gain by combining multiple IMUs, whether based on MLE or ADR/ZUPT. In repeated experiments, the maximum drift error of MLE is less than 4 m in the vertical direction of walk trajectories, and the one of the proposed ADR/ZUPT is less than 3 m.
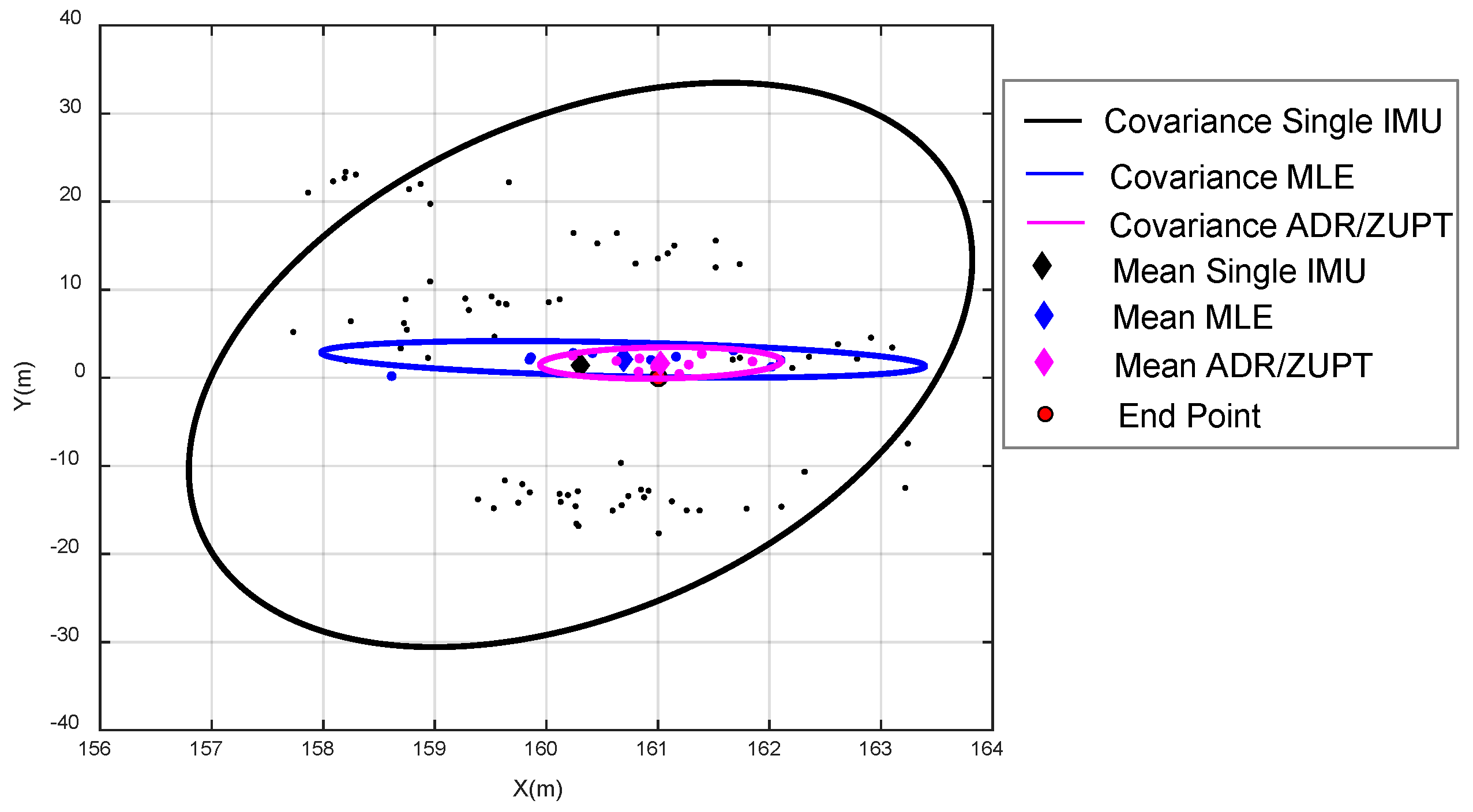
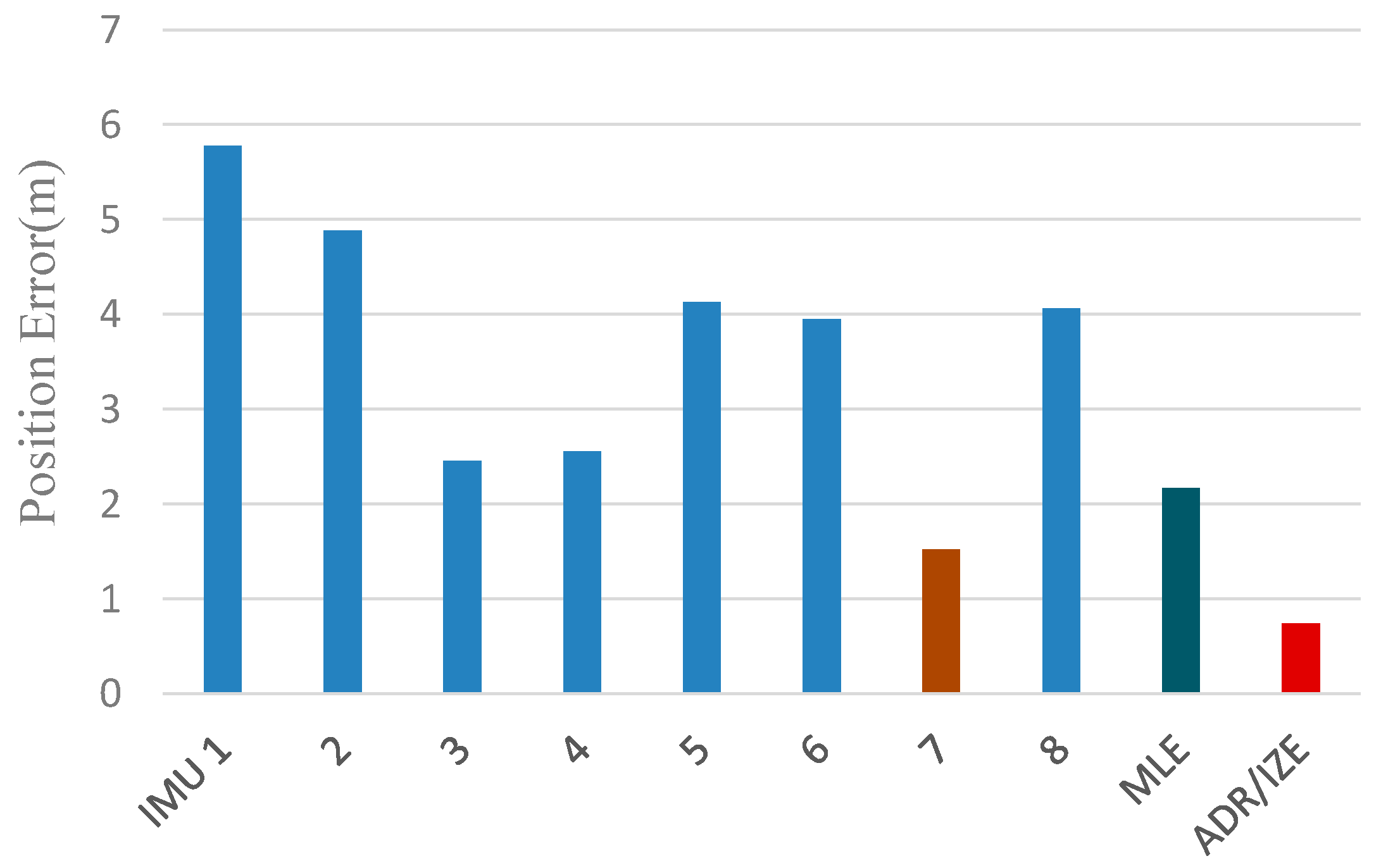
- (e)
- In the 10 walking tests, the end position accuracy estimated by ADR/ZUPT is higher than MLE in eight groups and lower only in the sixth and the tenth tests. The estimated mean error of the end position by ADR/ZUPT is about 0.5 m less than the estimated one by the MLE. Figure 10 further demonstrates that the proposed approach is superior to MLE.
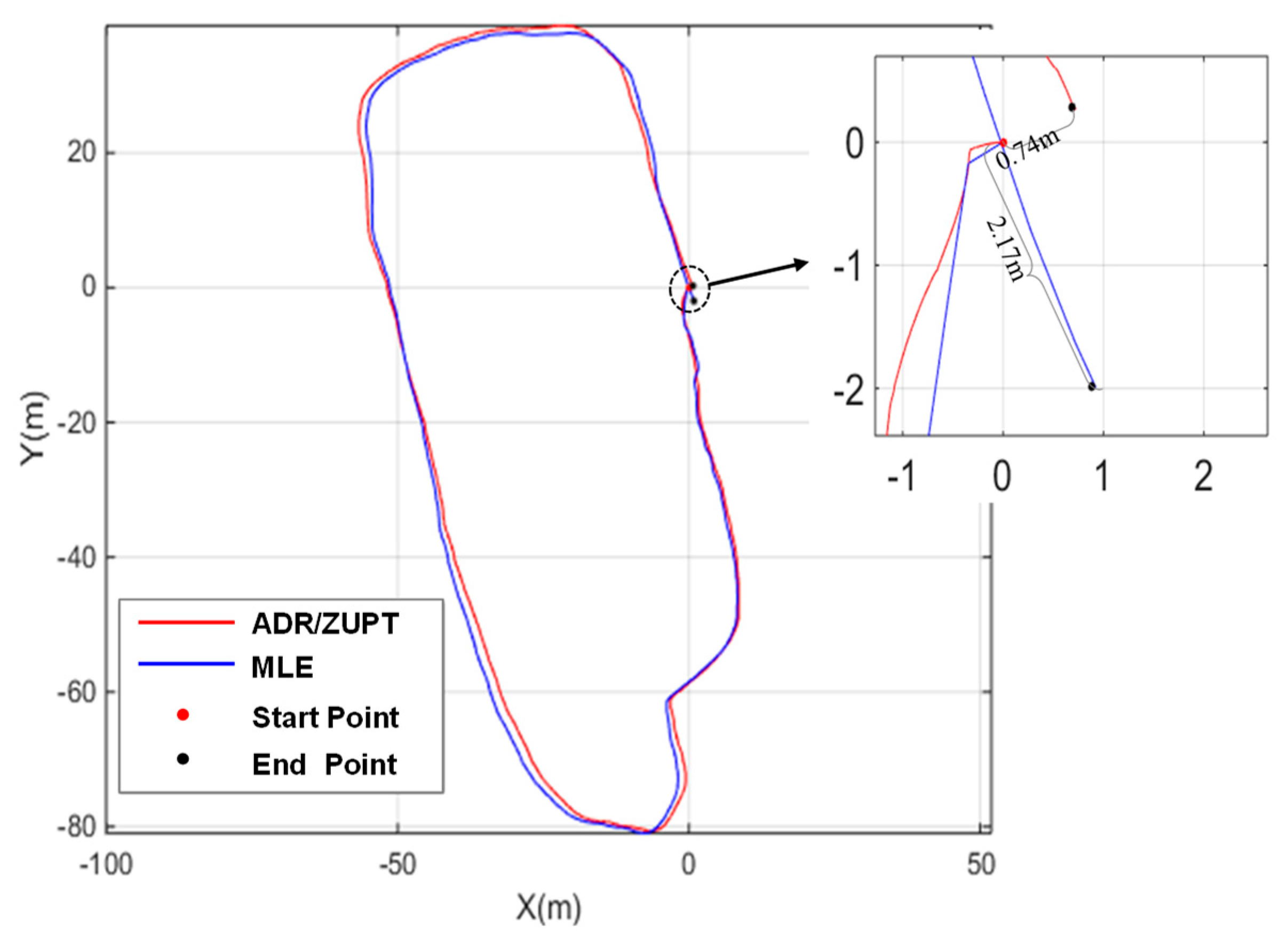
3.2. Closed-Loop Experiments
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, R.; Hoflinger, F.; Reindl, L. Inertial Sensor Based Indoor Localization and Monitoring System for Emergency Responders. IEEE Sens. J. 2013, 13, 838–848. [Google Scholar] [CrossRef]
- Ahn, H.S.; Ko, K.H. Simple Pedestrian Localization Algorithms Based on Distributed Wireless Sensor Networks. IEEE Trans. Ind. Electron. 2009, 56, 4296–4302. [Google Scholar]
- Marín, L.; Vallés, M.; Soriano, Á.; Valera, Á.; Albertos, P. Event-Based Localization in Ackermann Steering Limited Resource Mobile Robots. IEEE ASME Trans. Mechatron. 2014, 19, 1171–1182. [Google Scholar] [CrossRef]
- Wang, K.; Liu, Y.; Li, L.A. Simple and Parallel Algorithm for Real-Time Robot Localization by Fusing Monocular Vision and Odometry/AHRS Sensors. IEEE ASME Trans. Mechatron. 2014, 19, 1447–1457. [Google Scholar] [CrossRef]
- Fourati, H.; Manamanni, N.; Afilal, L.; Handrich, Y. Complementary Observer for Body Segments Motion Capturing by Inertial and Magnetic Sensors. IEEE ASME Trans. Mechatron. 2014, 19, 149–157. [Google Scholar] [CrossRef] [Green Version]
- Fischer, C.; Gellersen, H. Location and Navigation Support for Emergency Responders: A Survey. IEEE Pervasive Comput. 2010, 9, 38–47. [Google Scholar] [CrossRef] [Green Version]
- Harle, R.A. Survey of Indoor Inertial Positioning Systems for Pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Shu, Y.; Huang, Y.; Zhang, J.; Coue, P.; Cheng, P. Gradient-Based Fingerprinting for Indoor Localization and Tracking. IEEE Trans. Ind. Electron. 2016, 63, 2424–2433. [Google Scholar] [CrossRef]
- Kanaris, L.; Kokkinis, A.; Liotta, A.; Stavrou, S. Fusing Bluetooth Beacon Data with Wi-Fi Radiomaps for Improved Indoor Localization. Sensors 2017, 17, 812. [Google Scholar] [CrossRef] [Green Version]
- Mazhar, F.; Khan, M.G.; Saellberg, B. Precise Indoor Positioning Using UWB: A Review of Methods, Algorithms and Implementations. Wireless Pers. Commun. 2017, 97, 4467–4491. [Google Scholar] [CrossRef]
- Ruiz, A.R.J.; Granja, F.S. Comparing Ubisense, Bespoon and Decawave UWB Location Systems: Indoor Performance Analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Uradzinski, M.; Guo, H.; Liu, X.; Yu, M. Advanced Indoor Positioning Using Zigbee Wireless Technology. Wireless Pers. Commun. 2017, 97, 6509–6518. [Google Scholar] [CrossRef]
- Pasku, V.; Angelis, A.D.; Moschitta, A. A magnetic ranging-aided dead-reckoning positioning system for pedestrian applications. IEEE Trans. Instrum. Meas. 2017, 66, 953–963. [Google Scholar] [CrossRef]
- Gu, Y.; Song, Q.; Li, Y.; Ma, M.; Zhou, Z. An Anchor-Based Pedestrian Navigation Approach Using Only Inertial Sensors. Sensors 2016, 16, 334. [Google Scholar] [CrossRef] [Green Version]
- Bird, J.; Arden, D. Indoor Navigation with Foot-mounted Strapdown Inertial Navigation and Magnetic Sensors. IEEE Wireless Commun. 2011, 18, 28–35. [Google Scholar] [CrossRef]
- Ren, M.; Pan, K.; Liu, Y.; Guo, H.; Zhang, X.; Wang, P. A Novel Pedestrian Navigation Algorithm for a Foot-Mounted Inertial-Sensor-Based System. Sensors 2016, 16, 139. [Google Scholar] [CrossRef] [Green Version]
- Brigante, C.M.N.; Abbate, N.; Basile, A. Towards Miniaturization of a MEMS-Based Wearable Motion Capture System. IEEE Trans. Ind. Electron. 2011, 58, 3234–3241. [Google Scholar] [CrossRef]
- Höflinger, F.; Müller, J.; Zhang, R. A wireless micro inertial measurement unit (IMU). IEEE Trans. Instrum. Meas. 2013, 62, 2583–2595. [Google Scholar] [CrossRef]
- Yang, W.; Xiu, C.; Zhang, J.; Yang, D. A Novel 3D Pedestrian Navigation Method for a Multiple Sensors-Based Foot-Mounted Inertial System. Sensors 2017, 17, 2695. [Google Scholar] [CrossRef] [Green Version]
- Gu, Y.; Song, Q.; Li, Y.; Ma, M. Foot-mounted Pedestrian Navigation based on Particle Filter with an Adaptive Weight Updating Strategy. J. Navig. 2015, 68, 23–38. [Google Scholar] [CrossRef]
- Deng, Z.; Sun, M.; Wang, B.; Fu, M. Analysis and Calibration of the Non-orthogonal Angle in Duel-axis Rotational INS. IEEE Trans. Ind. Electron. 2017, 64, 4762–4771. [Google Scholar] [CrossRef]
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comp. Gr. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, H.; Qiu, S.; Gao, Q. Stance-Phase Detection for ZUPT-Aided Foot-Mounted Pedestrian Navigation System. IEEE ASME Trans. Mechatron. 2015, 20, 3170–3181. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, W.; Yang, X.; Xing, S. Hidden Markov model-based pedestrian navigation system using MEMS inertial sensors. Meas. Sci. Rev. 2015, 15, 35–43. [Google Scholar] [CrossRef] [Green Version]
- Den, Z.; Wang, P.; Liu, T.; Cao, Y.; Wang, B. Foot-Mounted Pedestrian Navigation Algorithm Based on BOR/MINS Integrated Framework. IEEE Trans. Ind. Electron. 2019, 67, 3980–3989. [Google Scholar]
- Johann, B.; Lauro, O.; Surat, K. Heuristic Reduction of Gyro Drift for Personnel Tracking Systems. J. Navig. 2009, 62, 41–58. [Google Scholar]
- Abdulrahim, K.; Hide, C.; Moore, T. Using constraints for shoe mounted indoor pedestrian navigation. J. Navig. 2012, 65, 15–28. [Google Scholar] [CrossRef]
- Jimenez Ruiz, A.R.; Seco Granja, F.; Prieto Honorato, J.C.; Guevara Rosas, J.I. Accurate Pedestrian Indoor Navigation by Tightly Coupling Foot-Mounted IMU and RFID Measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef] [Green Version]
- Bancroft, J.; Jared, B. Twin IMU-HSGPS Integration for Pedestrian Navigation. In Proceedings of the ION GNSS, Alberta, CA, USA, 3 October 2008; University of Calgary: Alberta, CA, USA, 2008; pp. 16–20. [Google Scholar]
- Skog, I.; Nilsson, J.O.; Zachariah, D. Fusing the information from two navigation systems using an upper bound on their maximum spatial separation. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–18. [Google Scholar]
- Wang, Q.; Zheng, G.; Zhang, M. Research on pedestrian location based on dual MIMU/magnetometer/ultrasonic module. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 565–570. [Google Scholar]
- Martin, H.F.S.; Groves, P.D.; Newman, M.; Faragher, R. A new approach to better low-cost MEMS IMU performance using sensor arrays. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2013), Nashville, TN, USA, 16–20 September 2013; The Institute of Navigation: Manassas, VA, USA, 2013; pp. 2125–2142. [Google Scholar]
- Skog, I.; Nilsson, J.O.; Händel, P. An open-source multi inertial measurement units (MIMU) platform. In Proceedings of the International Symposium on Inertial Sensors and Systems (ISISS), Laguna Beach, CA, USA, 25–26 February 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Skog, I.; Nilsson, J.; Händel, P.; Nehorai, A. Inertial Sensor Arrays, Maximum Likelihood, and Cramér–Rao Bound. IEEE Trans. Signal Process. 2016, 64, 4218–4227. [Google Scholar] [CrossRef] [Green Version]
- Nilsson, J.; Skog, I.; Händel, P. Aligning the Forces—Eliminating the Misalignments in IMU Arrays. IEEE Trans. Instrum. Meas. 2014, 63, 2498–2500. [Google Scholar] [CrossRef]
- Wahlström, J.; Skog, I.; Händel, P. Inertial Sensor Array Processing with Motion Models. In Proceedings of the 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 788–793. [Google Scholar]
- Skog, I.; Nilsson, J.; Händel, P. Pedestrian tracking using an IMU array. In Proccedings of the IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 6–7 January 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Estimated Error of End Position (m) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Test 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Mean | |
| MLE | 2.93 | 2.04 | 1.61 | 2.39 | 2.86 | 2.28 | 3.15 | 2.58 | 2.39 | 2.03 | 2.11 |
| ADR/ZUPT | 2.19 | 1.07 | 1.25 | 0.49 | 1.81 | 2.73 | 2.03 | 1.53 | 1.94 | 2.61 | 1.68 |
| Percentage | IMU Label | Method | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | MLE | ADR/ZUPT | |
| >3% | 2 | 2 | 1 | 1 | 3 | 1 | 1 | 1 | - | - |
| 1–3% | 15 | 17 | 11 | 8 | 16 | 18 | 8 | 19 | 5 | 1 |
| 0.6–1% | 3 | 1 | 6 | 8 | 1 | - | 9 | - | 9 | 5 |
| <0.6% | - | - | 2 | 3 | - | 1 | 2 | - | 6 | 14 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, L.; Tu, X.; Chen, Z. Foot-Mounted Pedestrian Navigation Method by Comparing ADR and Modified ZUPT Based on MEMS IMU Array. Sensors 2020, 20, 3787. https://doi.org/10.3390/s20133787
Xing L, Tu X, Chen Z. Foot-Mounted Pedestrian Navigation Method by Comparing ADR and Modified ZUPT Based on MEMS IMU Array. Sensors. 2020; 20(13):3787. https://doi.org/10.3390/s20133787
Chicago/Turabian StyleXing, Li, Xiaowei Tu, and Zhi Chen. 2020. "Foot-Mounted Pedestrian Navigation Method by Comparing ADR and Modified ZUPT Based on MEMS IMU Array" Sensors 20, no. 13: 3787. https://doi.org/10.3390/s20133787
APA StyleXing, L., Tu, X., & Chen, Z. (2020). Foot-Mounted Pedestrian Navigation Method by Comparing ADR and Modified ZUPT Based on MEMS IMU Array. Sensors, 20(13), 3787. https://doi.org/10.3390/s20133787