A Survey on Underwater Wireless Sensor Networks: Requirements, Taxonomy, Recent Advances, and Open Research Challenges

 ,
,
Abstract
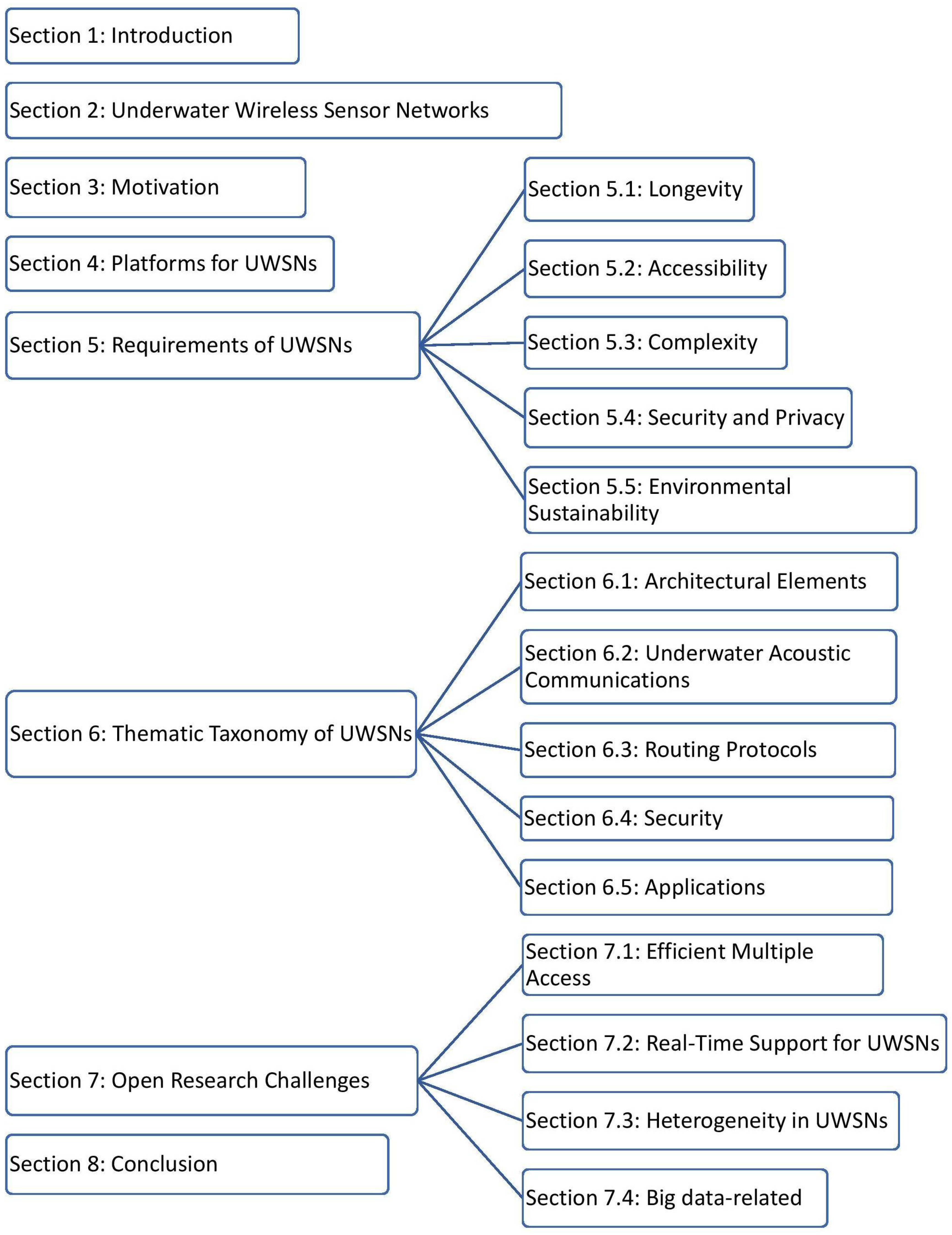
:1. Introduction
- Present a brief compilation of motivation for UWSNs and its significance.
- Identify and describe the key requirements to achieve essential procedures of implementing UWSNs.
- Investigate and present required platforms for developing robust UWSNs applications.
- Propose a thematic taxonomy to classify existing literature based on the most important parameters and comprehensively investigate recent advances solutions to get details concept and technical aspects.
- Highlight open research challenges of UWSNs as a guideline for future research to drive innovative development in various fields.
2. Underwater Wireless Sensor Networks
3. Motivation
4. Platforms for UWSNs
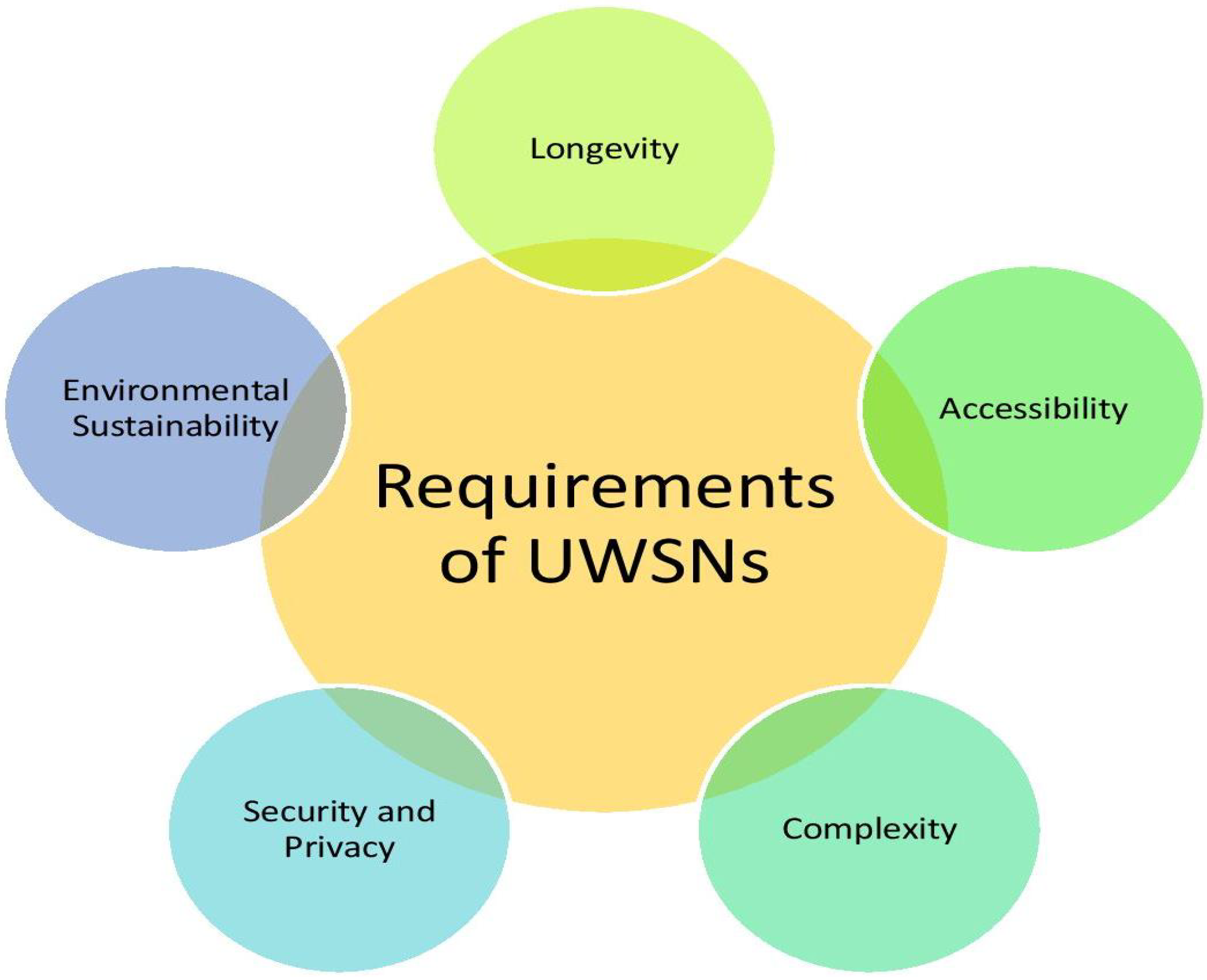
5. Requirements of UWSNs
5.1. Longevity
5.2. Accessibility
5.3. Complexity
5.4. Security and Privacy
5.5. Environmental Sustainability
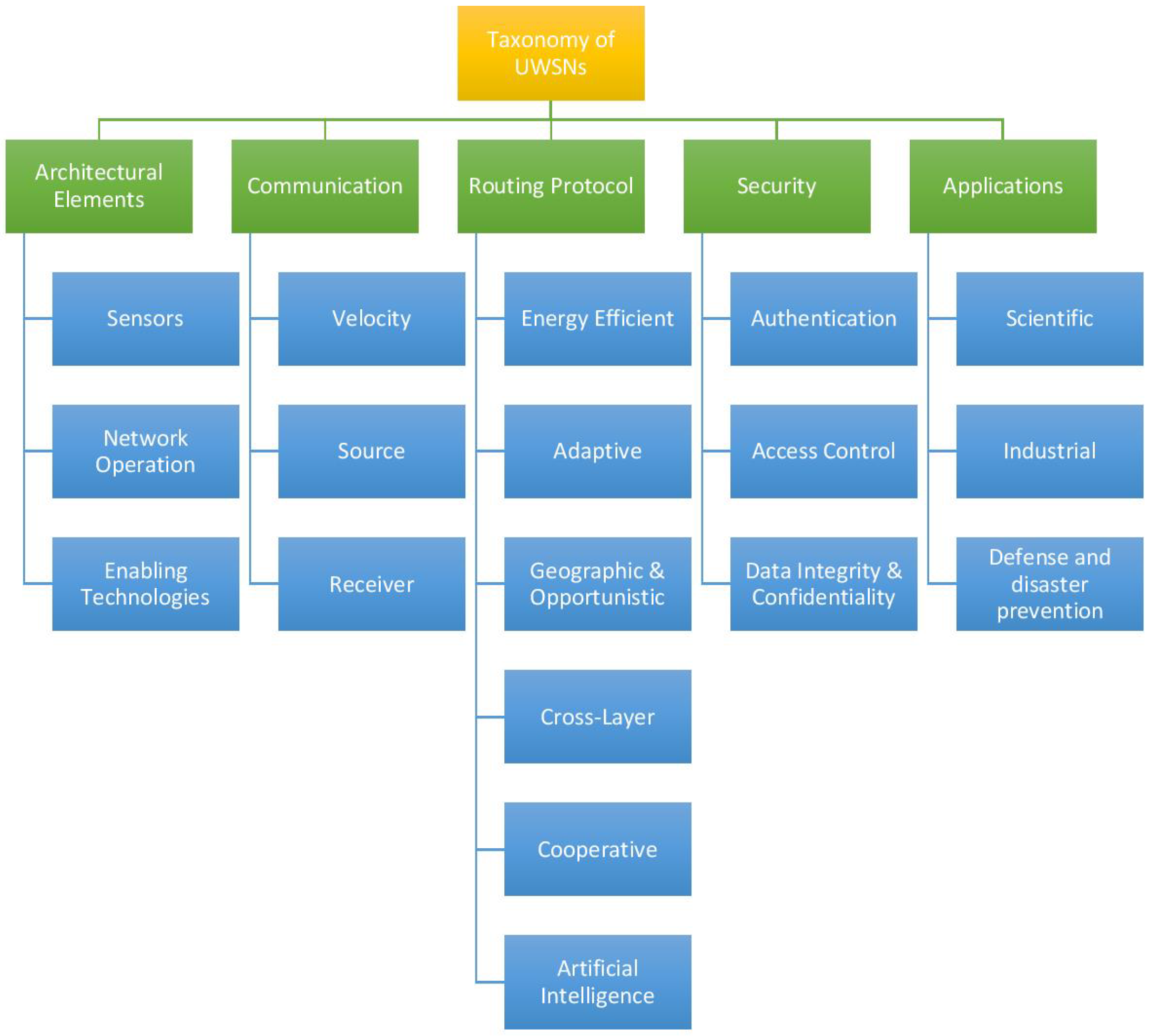
6. Thematic Taxonomy of UWSNs
6.1. Architectural Elements
6.1.1. Sensors
6.1.2. Network Operation
- (A)
- Localization
- (B)
- Deployment
6.1.3. Enabling Technologies
6.2. Underwater Acoustic Communications
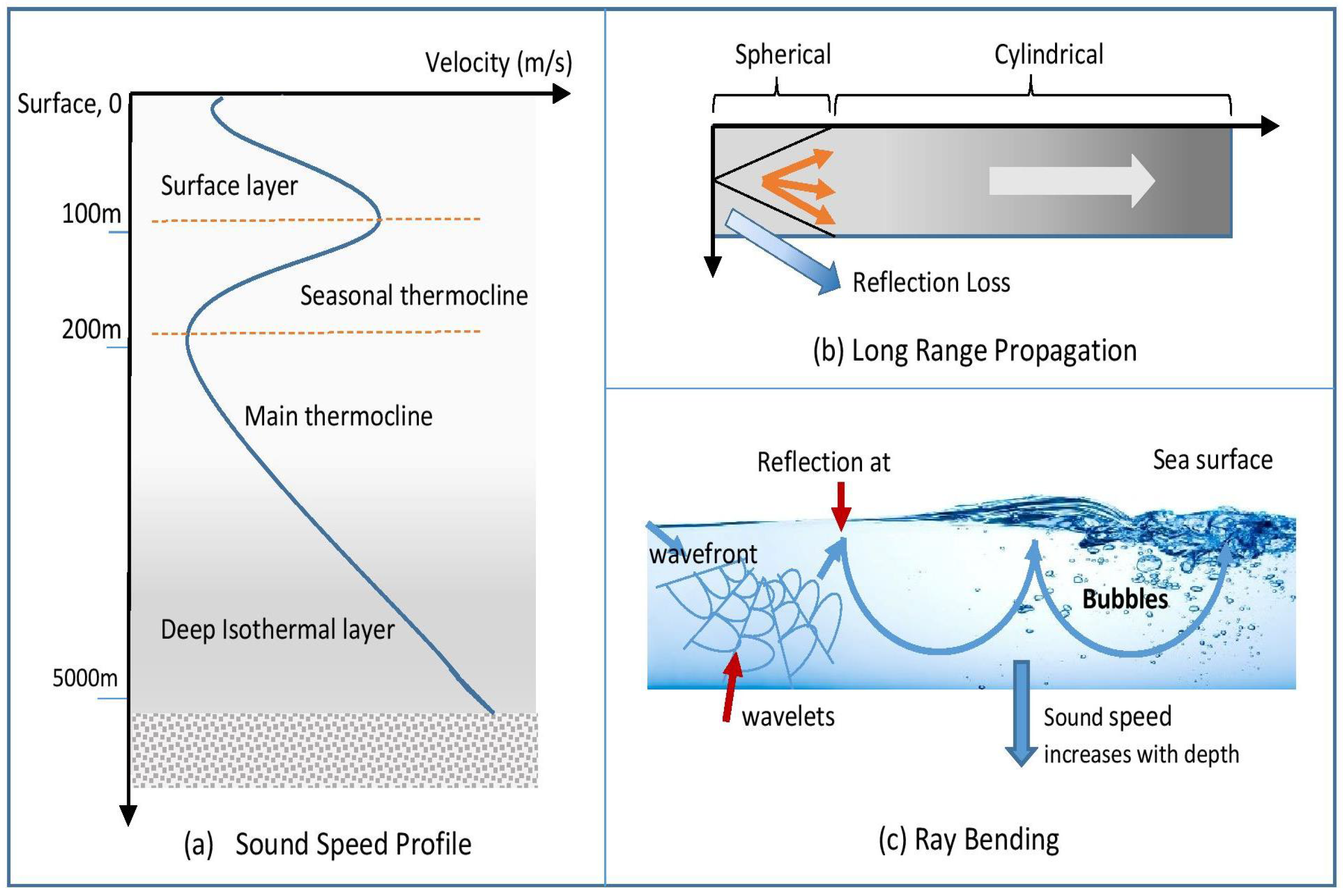
6.2.1. Sound Velocity
- Temperature. The sound velocity and water temperature are closely related to each other: the velocity will be higher with an increase in water temperature. When approaching the surface of the water, the temperature increases as well as the sound velocity.
- Salinity. The second factor that affects the velocity of sound in water is the salinity ratio. However, the salinity factor has a smaller effect on the velocity of sound compared to the temperature. Different concentrations of dissolved salts in pure water affect sound velocity. The level of ocean salinity is typically 35 p.s.u; this value varies depending on the characteristics of the water, and the effect of rock, soil, and atmosphere. Another factor regarding salinity levels is that they vary according to the depth of water.
- Hydrostatic Pressure. The hydrostatic pressure factor has also effect on the velocity of sound in the water. Hydrostatic pressure increases the velocity of sound with depth [53]. The increase in depth is directly proportional to the increase in hydrostatic pressure.
Sound Velocity Profile
- Ocean Depth below 200 m. The surface layer (0–100 m) is subject to change of environment, wind, and temperature. The wind circulation can mix up this layer and convert wind power to isothermal (mixed layer). The sound velocity is reduced dramatically if the wind speed is higher than 7 m/s due to the domination of bubbles found at a distance greater than 10 m below the surface of the water. In the seasonal thermocline region (100–200 m), the temperature changes seasonally. The temperature decreases according to the depth of the water. Consequently, in the winter season, the thermocline is weak since the surface of the water is continuously cool.
- Ocean Depth above 200 m. At depths of 200–100 m, there is a region with minimal sound speed known as the main thermocline. At this depth, the water temperature begins to increase. In the deepest zone, known as the deep isothermal layer, the temperature characteristics depend on the density of water and water salinity. Nevertheless, the impact of hydrostatic pressure on the sound velocity is significantly higher compared to temperature and salinity.
Ray Bending
Long Range Propagation
Sea Surface
6.2.2. Sound Sources
6.2.3. Sound Receiver
6.3. Routing Protocol
6.4. Security
6.4.1. Authentication
6.4.2. Access Control
6.4.3. Data Integrity and Confidentiality
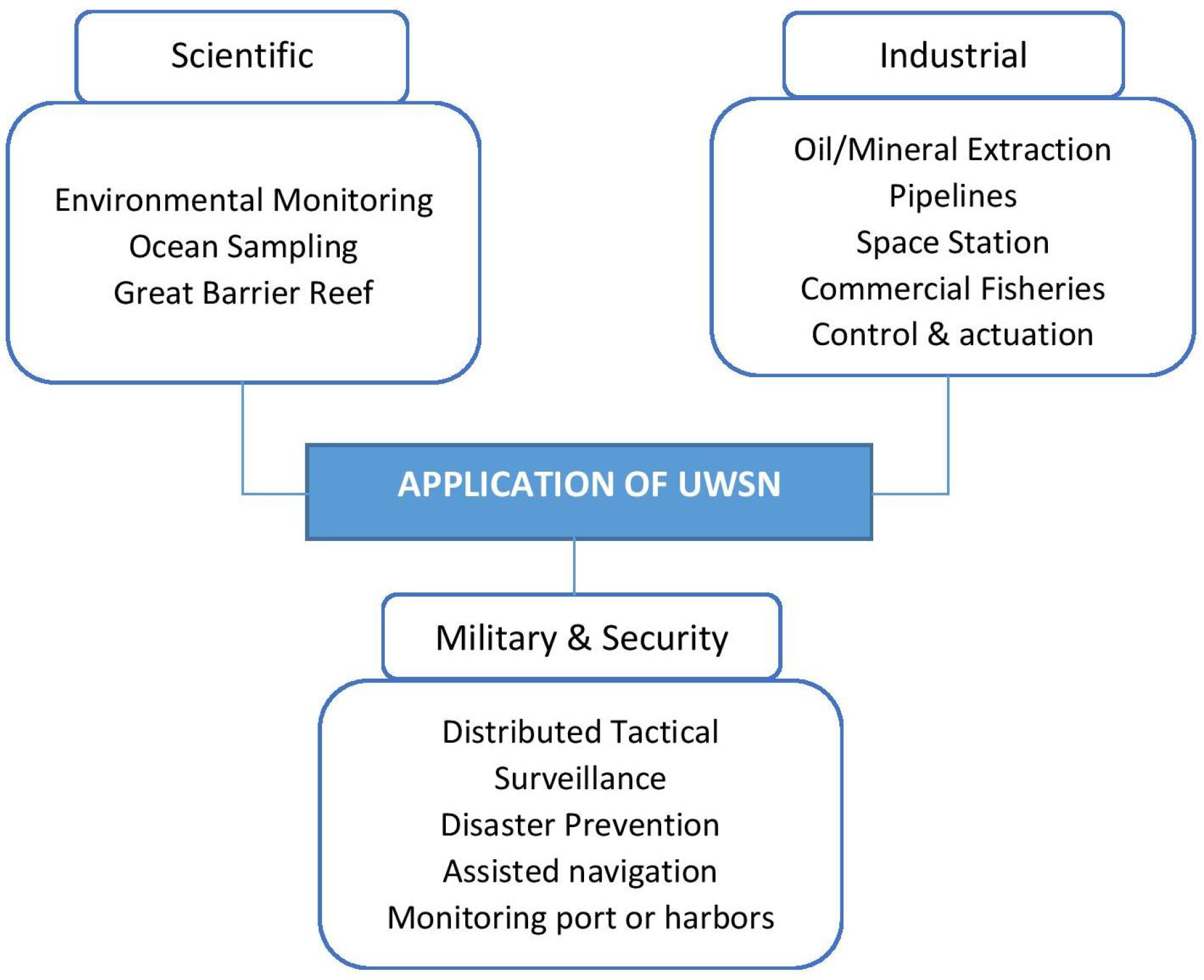
6.5. Applications
6.5.1. Scientific
6.5.2. Industrial
6.5.3. Defense and Disaster Prevention Application
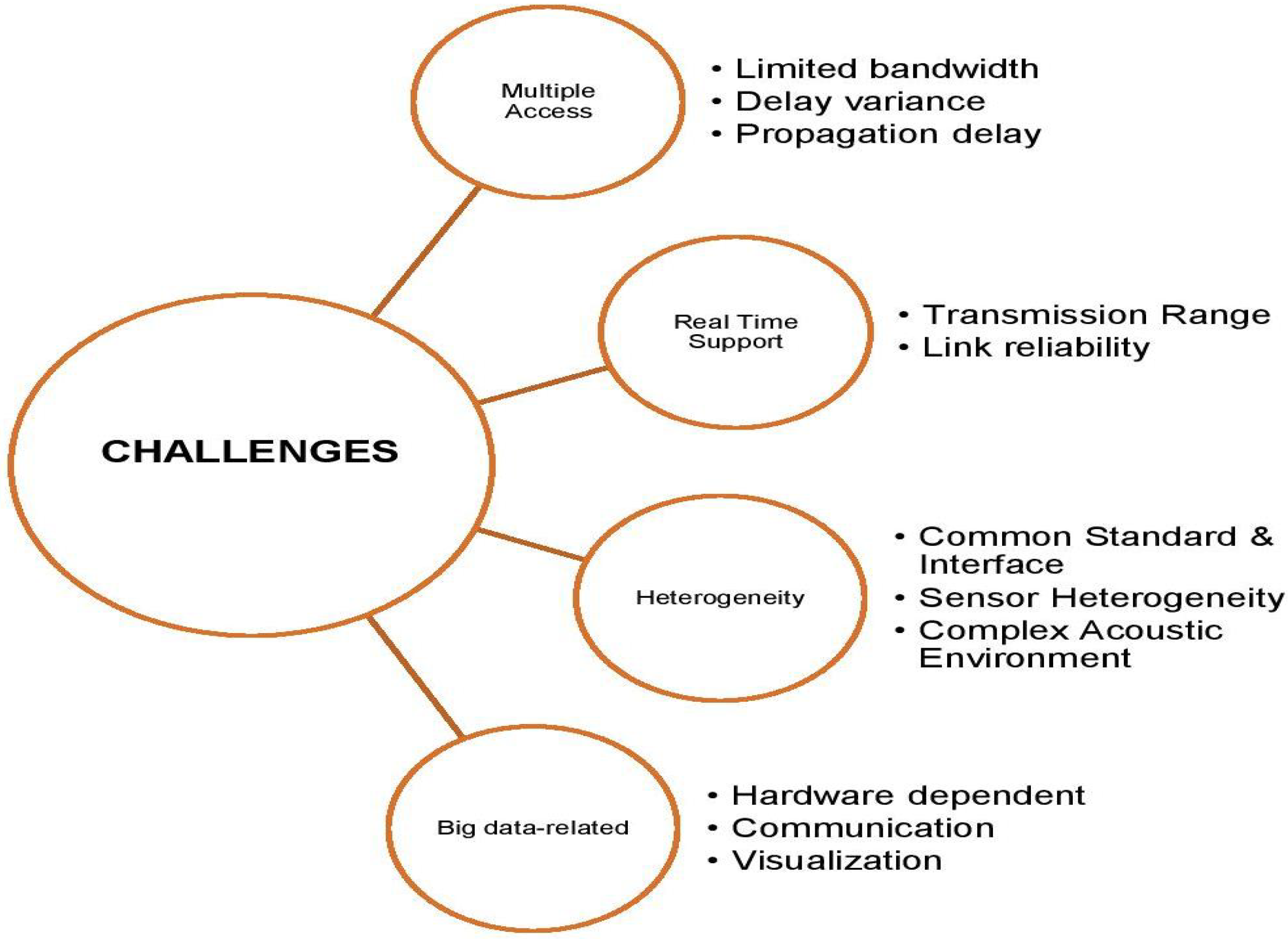
7. Open Research Challenges in UWSNs
7.1. Efficient Multiple Access
- 1.
- Limited Bandwidth
- 2.
- Delay Variance
- 3.
- Propagation Delay
7.2. Real-Time Support for UWSNs
- 1.
- Transmission Range
- 2.
- Link Reliability
7.3. Heterogeneity in UWSNs
- 1.
- Common Standard and Interface
- 2.
- Sensor Heterogeneity
- 3.
- Complex Acoustic Environment
7.4. Big Data-Related
- 1.
- Hardware Dependent
- 2.
- Communication
- 3.
- Visualization
8. Conclusions and Future Remarks
Funding
Conflicts of Interest
References
- Kilfoyle, D.B.; Baggeroer, A.B. The state of the art in underwater acoustic telemetry. IEEE J. Ocean. Eng. 2000, 25, 4–27. [Google Scholar] [CrossRef]
- Stojanovic, M. Acoustic (underwater) communications. In Encyclopedia of Telecommunications; Wiley: Hoboken, NJ, USA, 2019. [Google Scholar] [CrossRef]
- Awan, K.M.; Shah, P.A.; Iqbal, K.; Gillani, S.; Ahmad, W.; Nam, Y. Underwater wireless sensor networks: A review of recent issues and challenges. Wirel. Commun. Mob. Comput. 2019, 2019, 6470359. [Google Scholar] [CrossRef]
- Murad, M.; Sheikh, A.A.; Manzoor, M.A.; Felemban, E.; Qaisar, S. A survey on current underwater acoustic sensor network applications. Int. J. Comput. Theory Eng. 2015, 7, 51. [Google Scholar] [CrossRef] [Green Version]
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef] [Green Version]
- Jindal, H.; Saxena, S.; Singh, S. Challenges and issues in underwater acoustics sensor networks: A review. In Proceedings of the International Conference on Parallel, Distributed and Grid Computing, Solan, India, 11–13 December 2014; pp. 251–255. [Google Scholar]
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater acoustic wireless sensor networks: Advances and future trends in physical, MAC and routing layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Maindalkar, A.A.; Ansari, S.M. Design of Robotic Fish for Aquatic Environment Monitoring. Int. J. Comput. Appl. 2015, 117, 31–34. [Google Scholar]
- Domingo, M.C. An overview of the internet of underwater things. J. Netw. Comput. Appl. 2012, 35, 1879–1890. [Google Scholar] [CrossRef]
- Jiang, P.; Xu, Y.; Wu, F. Node self-deployment algorithm based on an uneven cluster with radius adjusting for underwater sensor networks. Sensors 2016, 16, 98. [Google Scholar] [CrossRef] [Green Version]
- Lazaropoulos, A.G. Designing the Undersea Internet of Things (IoT) and Machine-to-Machine (M2M) Communications Using UnderWater Acoustic MIMO Networks. Trends Renew. Energy 2016, 2, 13–50. [Google Scholar] [CrossRef] [Green Version]
- Khan, A.; Jenkins, L. Undersea wireless sensor network for ocean pollution prevention. In Proceedings of the 2008 3rd International Conference on Communication Systems Software and Middleware and Workshops (COMSWARE’08), Bangalore, India, 6–10 January 2008; pp. 2–8. [Google Scholar]
- Watt, A.; Phillips, M.R.; Campbell, C.A.; Wells, I.; Hole, S. Wireless Sensor Networks for monitoring underwater sediment transport. Sci. Total Environ. 2019, 667, 160–165. [Google Scholar] [CrossRef] [PubMed]
- Garcia, M.; Sendra, S.; Atenas, M.; Lloret, J. Underwater wireless ad-hoc networks: A survey. In Mobile Ad Hoc Networks: Current Status and Future Trends; CRC Press: Boca Raton, FL, USA, 2011; pp. 379–411. [Google Scholar] [CrossRef]
- Zuba, M.; Song, A.; Cui, J.H. Exploring parabolic equation models for improved underwater network simulations. In Proceedings of the Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014; pp. 1–5. [Google Scholar]
- Luo, H.; Wu, K.; Ruby, R.; Hong, F.; Guo, Z.; Ni, L.M. Simulation and Experimentation Platforms for Underwater Acoustic Sensor Networks: Advancements and Challenges. ACM Comput. Surv. (CSUR) 2017, 50, 28. [Google Scholar] [CrossRef]
- Jiang, X.; Shi, C.; Wang, Y.; Smalley, J.; Cheng, J.; Zhang, X. Nonresonant Metasurface for Fast Decoding in Acoustic Communications. Phys. Rev. Appl. 2020, 13, 014014. [Google Scholar] [CrossRef]
- Saeed, N.; Celik, A.; Al-Naffouri, T.Y.; Alouini, M.S. Underwater optical wireless communications, networking, and localization: A survey. Ad Hoc Netw. 2019, 94, 101935. [Google Scholar] [CrossRef] [Green Version]
- Codarin, A.; Wysocki, L.E.; Ladich, F.; Picciulin, M. Effects of ambient and boat noise on hearing and communication in three fish species living in a marine protected area (Miramare, Italy). Mar. Pollut. Bull. 2009, 58, 1880–1887. [Google Scholar] [CrossRef]
- Lin, W.; Li, D.; Tan, Y.; Chen, J.; Sun, T. Architecture of underwater acoustic sensor networks: A survey. In Proceedings of the First International Conference on Intelligent Networks and Intelligent Systems, Wuhan, China, 1–3 November 2008; pp. 155–159. [Google Scholar]
- Xiao, Y. Underwater Acoustic Sensor Networks; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Mridula, K.; Ameer, P. Localization under anchor node uncertainty for underwater acoustic sensor networks. Int. J. Commun. Syst. 2018, 31, e3445. [Google Scholar] [CrossRef]
- Fang, X.; Yan, W.; Chen, W. Sensor placement for underwater source localization with fixed distances. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1379–1383. [Google Scholar] [CrossRef]
- Ramezani, H.; Fazel, F.; Stojanovic, M.; Leus, G. Collision tolerant and collision free packet scheduling for underwater acoustic localization. IEEE Trans. Wirel. Commun. 2015, 14, 2584–2595. [Google Scholar] [CrossRef]
- Beniwal, M.; Singh, R.P.; Sangwan, A. A localization scheme for underwater sensor networks without Time Synchronization. Wirel. Pers. Commun. 2016, 88, 537–552. [Google Scholar] [CrossRef]
- Li, J.; Gao, H.; Zhang, S.; Chang, S.; Chen, J.; Liu, Z. Self-localization of autonomous underwater vehicles with accurate sound travel time solution. Comput. Electr. Eng. 2016, 50, 26–38. [Google Scholar] [CrossRef]
- Han, G.; Zhang, C.; Shu, L.; Sun, N.; Li, Q. A survey on deployment algorithms in underwater acoustic sensor networks. Int. J. Distrib. Sens. Netw. 2013, 9, 314049. [Google Scholar] [CrossRef]
- Vilela, J.; Kashino, Z.; Ly, R.; Nejat, G.; Benhabib, B. A Dynamic Approach to Sensor Network Deployment for Mobile-Target Detection in Unstructured, Expanding Search Areas. IEEE Sens. J. 2016, 16, 4405–4417. [Google Scholar] [CrossRef]
- Wang, T.; Sun, Y.; Xu, Z.; Zhai, W.; Zhuo, R. Node placement for long bounded belt complete 2-coverage in wireless sensor networks. Math. Probl. Eng. 2015, 2015, 672768. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Gong, X.; Zhang, J.; Chen, J.; Sun, Y. Curve-based deployment for barrier coverage in wireless sensor networks. IEEE Trans. Wirel. Commun. 2014, 13, 724–735. [Google Scholar] [CrossRef]
- Liu, B.; Dousse, O.; Nain, P.; Towsley, D. Dynamic coverage of mobile sensor networks. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 301–311. [Google Scholar] [CrossRef] [Green Version]
- Wang, B. Coverage Control in Sensor Networks; Springer Science & Business Media: Berlin, Germany, 2010. [Google Scholar]
- Amaldi, E.; Capone, A.; Cesana, M.; Filippini, I. Design of wireless sensor networks for mobile target detection. IEEE/ACM Trans. Netw. 2012, 20, 784–797. [Google Scholar] [CrossRef]
- Du, H.; Xia, N.; Zheng, R. Particle swarm inspired underwater sensor self-deployment. Sensors 2014, 14, 15262–15281. [Google Scholar] [CrossRef] [Green Version]
- Felamban, M.; Shihada, B.; Jamshaid, K. Optimal node placement in underwater wireless sensor networks. In Proceedings of the IEEE 27th International Conference on Advanced Information Networking and Applications (AINA), Barcelona, Spain, 25–28 March 2013; pp. 492–499. [Google Scholar]
- Yu, S.; Liu, S.; Jiang, P. A High-Efficiency Uneven Cluster Deployment Algorithm Based on Network Layered for Event Coverage in UWSNs. Sensors 2016, 16, 2103. [Google Scholar] [CrossRef] [Green Version]
- Moreno-Salinas, D.; Pascoal, A.; Aranda, J. Optimal sensor placement for acoustic underwater target positioning with range-only measurements. IEEE J. Ocean. Eng. 2016, 41, 620–643. [Google Scholar] [CrossRef]
- Wu, B.; Feng, Y.P.; Zheng, H.Y.; Chen, X. Dynamic cluster members scheduling for target tracking in sensor networks. IEEE Sens. J. 2016, 16, 7242–7249. [Google Scholar] [CrossRef]
- Akbarzadeh, V.; Lévesque, J.C.; Gagné, C.; Parizeau, M. Efficient sensor placement optimization using gradient descent and probabilistic coverage. Sensors 2014, 14, 15525–15552. [Google Scholar] [CrossRef] [PubMed]
- Wettergren, T.A.; Costa, R. Optimal multiobjective placement of distributed sensors against moving targets. ACM Trans. Sens. Netw. 2012, 8, 21. [Google Scholar] [CrossRef]
- Silvestri, S.; Goss, K. MobiBar: An autonomous deployment algorithm for barrier coverage with mobile sensors. Ad Hoc Netw. 2017, 54, 111–129. [Google Scholar] [CrossRef]
- Jiang, P.; Liu, J.; Ruan, B.; Jiang, L.; Wu, F. A new node deployment and location dispatch algorithm for underwater sensor networks. Sensors 2016, 16, 82. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.C.; Deng, D.J.; Wang, S.B. Extending the lifetime of dynamic underwater acoustic sensor networks using multi-population harmony search algorithm. IEEE Sens. J. 2016, 16, 4034–4042. [Google Scholar] [CrossRef]
- Merico, D. Tracking with high-density, large-scale wireless sensor networks. J. Ambient Intell. Smart Environ. 2010, 2, 441–442. [Google Scholar] [CrossRef] [Green Version]
- Chen, M. Towards smart city: M2M communications with software agent intelligence. Multimed. Tools Appl. 2013, 67, 167–178. [Google Scholar] [CrossRef] [Green Version]
- Wan, J.; Tang, S.; Shu, Z.; Li, D.; Wang, S.; Imran, M.; Vasilakos, A.V. Software-defined industrial internet of things in the context of industry 4.0. IEEE Sens. J. 2016, 16, 7373–7380. [Google Scholar] [CrossRef]
- Murugesan, S. Harnessing green IT: Principles and practices. IT Prof. 2008, 10, 24–33. [Google Scholar] [CrossRef]
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater sensor networks: Applications, advances and challenges. Philos. Trans. R. Soc. A 2012, 370, 158–175. [Google Scholar] [CrossRef]
- Coutinho, R.W.; Boukerche, A.; Vieira, L.F.; Loureiro, A.A. On the design of green protocols for underwater sensor networks. IEEE Commun. Mag. 2016, 54, 67–73. [Google Scholar] [CrossRef]
- Jain, S.; Kumar, A.; Mandal, S.; Ong, J.; Poutievski, L.; Singh, A.; Venkata, S.; Wanderer, J.; Zhou, J.; Zhu, M.; et al. B4: Experience with a globally-deployed software defined WAN. ACM SIGCOMM Comput. Commun. Rev. 2013, 43, 3–14. [Google Scholar] [CrossRef]
- Leighton, T.G. The Acoustic Bubble; Academic Press: London, UK, 1994. [Google Scholar]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications; Springer Science & Business Media: New York, NY, USA, 2002. [Google Scholar]
- Syed, A.A.; Ye, W.; Heidemann, J.; Krishnamachari, B. Understanding spatio-temporal uncertainty in medium access with ALOHA protocols. In Proceedings of the Second Workshop on Underwater Networks, Montréal, QC, Canada, 14 September 2007; pp. 41–48. [Google Scholar]
- Wenz, G.M. Acoustic Ambient Noise in Ocean–Spectra and Sources. J. Acoust. Soc. Am. 1962, 34, 1936–1956. [Google Scholar] [CrossRef]
- Knudsen, V.O.; Alford, R.S.; Emling, J.W. Underwater ambient noise. J. Mar. Res. 1948, 7, 410–429. [Google Scholar]
- Aparicio, J.; Jiménez, A.; Alvarez, F.J.; Urena, J.; Marziani, C.D.; Diego, C. Modeling the behavior of an underwater acoustic relative positioning system based on complementary set of sequences. Sensors 2011, 11, 11188–11205. [Google Scholar] [CrossRef] [PubMed]
- Schneider, T.; Schmidt, H. Model-based adaptive behavior framework for optimal acoustic communication and sensing by marine robots. IEEE J. Ocean. Eng. 2013, 38, 522–533. [Google Scholar] [CrossRef] [Green Version]
- Nams, D.; Seto, M.L.; Leonard, J.J. On-line adaptation of underwater acoustic transmission rates to optimize communications for collaborative AUV missions. In Proceedings of the OCEANS’15 MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–8. [Google Scholar]
- Paull, L.; Huang, G.; Seto, M.; Leonard, J.J. Communication-Constrained Multi-AUV Cooperative SLAM. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Lee, G.; Chwa, D. Decentralized behavior-based formation control of multiple robots considering obstacle avoidance. Intell. Serv. Robot. 2018, 11, 127–138. [Google Scholar] [CrossRef]
- Ferri, G.; Munafò, A.; LePage, K.D. An Autonomous Underwater Vehicle Data-Driven Control Strategy for Target Tracking. IEEE J. Ocean. Eng. 2018, 43, 323–343. [Google Scholar] [CrossRef]
- Schneider, T.; Schmidt, H. NETSIM: A Realtime Virtual Ocean Hardware-in-the-loop Acoustic Modem Network Simulator. In Proceedings of the 2018 Fourth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 28–30 August 2018; pp. 1–5. [Google Scholar]
- Subramani, D.N.; Wei, Q.J.; Lermusiaux, P.F. Stochastic time-optimal path-planning in uncertain, strong, and dynamic flows. Comput. Methods Appl. Mech. Eng. 2018, 333, 218–237. [Google Scholar] [CrossRef]
- Bouabdallah, F.; Zidi, C.; Boutaba, R. Joint Routing and Energy Management in UnderWater Acoustic Sensor Networks. IEEE Trans. Netw. Serv. Manag. 2017, 14, 456–471. [Google Scholar] [CrossRef]
- Chao, C.M.; Jiang, C.H.; Li, W.C. DRP: An energy-efficient routing protocol for underwater sensor networks. Int. J. Commun. Syst. 2017, 30, e3303. [Google Scholar] [CrossRef]
- Rani, S.; Ahmed, S.H.; Malhotra, J.; Talwar, R. Energy efficient chain based routing protocol for underwater wireless sensor networks. J. Netw. Comput. Appl. 2017, 92, 42–50. [Google Scholar] [CrossRef]
- Javaid, N.; Shah, M.; Ahmad, A.; Imran, M.; Khan, M.I.; Vasilakos, A.V. An enhanced energy balanced data transmission protocol for underwater acoustic sensor networks. Sensors 2016, 16, 487. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, Z.; Yao, B.; Xing, R.; Shu, L.; Bu, S. E-CARP: An energy efficient routing protocol for UWSNs in the internet of underwater things. IEEE Sens. J. 2015, 16, 4072–4082. [Google Scholar] [CrossRef]
- Majid, A.; Azam, I.; Waheed, A.; Zain-ul Abidin, M.; Hafeez, T.; Khan, Z.A.; Qasim, U.; Javaid, N. An energy efficient and balanced energy consumption cluster based routing protocol for underwater wireless sensor networks. In Proceedings of the IEEE 30th International Conference on Advanced Information Networking and Applications (AINA), Crans-Montana, Switzerland, 23–25 March 2016; pp. 324–333. [Google Scholar]
- Sher, A.; Javaid, N.; Azam, I.; Ahmad, H.; Abdul, W.; Ghouzali, S.; Niaz, I.A.; Khan, F.A. Monitoring square and circular fields with sensors using energy-efficient cluster-based routing for underwater wireless sensor networks. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.D.; Wu, D.R.; Chen, W.; Shih, K.P. A Self-Adaptive Cooperative Routing Protocol for underwater acoustic sensor networks. In Proceedings of the OCEANS’15 MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–5. [Google Scholar]
- Yu, H.; Yao, N.; Liu, J. An adaptive routing protocol in underwater sparse acoustic sensor networks. Ad Hoc Netw. 2015, 34, 121–143. [Google Scholar] [CrossRef]
- Javaid, N.; Jafri, M.R.; Khan, Z.A.; Qasim, U.; Alghamdi, T.A.; Ali, M. Iamctd: Improved adaptive mobility of courier nodes in threshold-optimized dbr protocol for underwater wireless sensor networks. Int. J. Distrib. Sens. Netw. 2014, 10, 213012. [Google Scholar] [CrossRef]
- Hafeez, T.; Javaid, N.; Hameed, A.R.; Sher, A.; Khan, Z.A.; Qasim, U. AVN-AHH-VBF: Avoiding void node with adaptive hop-by-hop vector based forwarding for underwater wireless sensor networks. In Proceedings of the 10th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS), Fukuoka, Japan, 6–8 July 2016; pp. 49–56. [Google Scholar]
- Jin, Z.; Ma, Y.; Su, Y.; Li, S.; Fu, X. A Q-Learning-Based Delay-Aware Routing Algorithm to Extend the Lifetime of Underwater Sensor Networks. Sensors 2017, 17, 1660. [Google Scholar] [CrossRef] [Green Version]
- Coutinho, R.W.; Boukerche, A.; Vieira, L.F.; Loureiro, A.A. EnOR: Energy balancing routing protocol for underwater sensor networks. In Proceedings of the IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Javaid, N.; Muhammad; Sher, A.; Abdul, W.; Niaz, I.A.; Almogren, A.; Alamri, A. Cooperative Opportunistic Pressure Based Routing for Underwater Wireless Sensor Networks. Sensors 2017, 17, 629. [Google Scholar] [CrossRef] [Green Version]
- Kanthimathi, N.; Dejey. Void handling using Geo-Opportunistic Routing in underwater wireless sensor networks. Comput. Electr. Eng. 2017, 64, 365–379. [Google Scholar] [CrossRef]
- Coutinho, R.W.; Boukerche, A.; Vieira, L.F.; Loureiro, A.A. Geographic and opportunistic routing for underwater sensor networks. IEEE Trans. Comput. 2016, 65, 548–561. [Google Scholar] [CrossRef]
- Jiang, J.; Han, G.; Guo, H.; Shu, L.; Rodrigues, J.J. Geographic multipath routing based on geospatial division in duty-cycled underwater wireless sensor networks. J. Netw. Comput. Appl. 2016, 59, 4–13. [Google Scholar] [CrossRef]
- Abdallah, A.E.; Abdallah, E.E.; Bsoul, M.; Otoom, A.F. Randomized geographic-based routing with nearly guaranteed delivery for three-dimensional ad hoc network. Int. J. Distrib. Sens. Netw. 2016, 12. [Google Scholar] [CrossRef]
- Dhongdi, S.C.; Nahar, P.; Sethunathan, R.; Gudino, L.J.; Anupama, K. Cross-layer protocol stack development for three-dimensional underwater Acoustic Sensor Network. J. Netw. Comput. Appl. 2017, 92, 3–19. [Google Scholar] [CrossRef]
- Wang, H.; Wang, S.; Bu, R.; Zhang, E. A Novel Cross-Layer Routing Protocol Based on Network Coding for Underwater Sensor Networks. Sensors 2017, 17, 1821. [Google Scholar] [CrossRef] [Green Version]
- Sun, N.; Han, G.; Wu, T.; Jiang, J.; Shu, L. A reliable and energy efficient VBF-improved cross-layer protocol for underwater acoustic sensor network. In Proceedings of the 2015 11th International Conference on Heterogeneous Networking for Quality, Reliability, Security and Robustness (QSHINE), Taipei, Taiwan, 19–20 August 2015; pp. 44–49. [Google Scholar]
- Ahmed, S.; Javaid, N.; Khan, F.A.; Durrani, M.Y.; Ali, A.; Shaukat, A.; Sandhu, M.M.; Khan, Z.A.; Qasim, U. Co-UWSN: Cooperative energy-efficient protocol for underwater WSNs. Int. J. Distrib. Sens. Netw. 2015, 11, 891410. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Jin, X.; Xu, X. Energy-efficient mobile data collection adopting node cooperation in an underwater acoustic sensor network. China Commun. 2017, 14, 32–42. [Google Scholar] [CrossRef]
- Chen, Y.; Jin, X.; Wan, L.; Zhang, X.; Xu, X. Selective Dynamic Coded Cooperative Communications for Multi-Hop Underwater Acoustic Sensor Networks. IEEE Access 2019, 7, 70552–70563. [Google Scholar] [CrossRef]
- Han, G.; Long, X.; Zhu, C.; Guizani, M.; Zhang, W. A high-availability data collection scheme based on multi-AUVs for underwater sensor networks. IEEE Trans. Mobile Comput. 2019, 19, 1010–1022. [Google Scholar] [CrossRef]
- Nasir, H.; Javaid, N.; Ashraf, H.; Manzoor, S.; Khan, Z.A.; Qasim, U.; Sher, M. CoDBR: Cooperative depth based routing for underwater wireless sensor networks. In Proceedings of the 2014 Ninth International Conference on Broadband and Wireless Computing, Communication and Applications, Guangdong, China, 8–10 November 2014; pp. 52–57. [Google Scholar]
- Yu, W.; Chen, Y.; Wan, L.; Zhang, X.; Zhu, P.; Xu, X. An Energy Optimization Clustering Scheme for Multi-Hop Underwater Acoustic Cooperative Sensor Networks. IEEE Access 2020, 8, 89171–89184. [Google Scholar] [CrossRef]
- Ahmed, S.; Javaid, N.; Ahmad, A.; Ahmed, I.; Durrani, M.Y.; Ali, A.; Haider, S.B.; Ilahi, M. SPARCO: Stochastic performance analysis with reliability and cooperation for underwater wireless sensor networks. J. Sens. 2016, 2016, 7604163. [Google Scholar] [CrossRef] [Green Version]
- Plate, R.; Wakayama, C. Utilizing kinematics and selective sweeping in reinforcement learning-based routing algorithms for underwater networks. Ad Hoc Netw. 2015, 34, 105–120. [Google Scholar] [CrossRef] [Green Version]
- Hu, T.; Fei, Y. QELAR: A machine-learning-based adaptive routing protocol for energy-efficient and lifetime-extended underwater sensor networks. IEEE Trans. Mob. Comput. 2010, 9, 796–809. [Google Scholar]
- Park, S.H.; Mitchell, P.D.; Grace, D. Reinforcement Learning Based MAC Protocol (UW-ALOHA-Q) for Underwater Acoustic Sensor Networks. IEEE Access 2019, 7, 165531–165542. [Google Scholar] [CrossRef]
- Lopez, J.; Roman, R.; Alcaraz, C. Analysis of security threats, requirements, technologies and standards in wireless sensor networks. In Foundations of Security Analysis and Design V; Springer: New York, NY, USA, 2009; pp. 289–338. [Google Scholar]
- Law, Y.W.; Palaniswami, M.; Hoesel, L.V.; Doumen, J.; Hartel, P.; Havinga, P. Energy-efficient link-layer jamming attacks against wireless sensor network MAC protocols. ACM Trans. Sens. Netw. 2009, 5, 6. [Google Scholar] [CrossRef] [Green Version]
- Misra, S.; Dash, S.; Khatua, M.; Vasilakos, A.V.; Obaidat, M.S. Jamming in underwater sensor networks: Detection and mitigation. IET Commun. 2012, 6, 2178–2188. [Google Scholar] [CrossRef]
- Zuba, M.; Shi, Z.; Peng, Z.; Cui, J.H.; Zhou, S. Vulnerabilities of underwater acoustic networks to denial-of-service jamming attacks. Secur. Commun. Netw. 2015, 8, 2635–2645. [Google Scholar] [CrossRef]
- Martin, R.; Rajasekaran, S. Data centric approach to analyzing security threats in underwater sensor networks. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar]
- Han, G.; Liu, L.; Jiang, J.; Shu, L.; Rodrigues, J.J. A collaborative secure localization algorithm based on trust model in underwater wireless sensor networks. Sensors 2016, 16, 229. [Google Scholar] [CrossRef] [Green Version]
- Jiang, J.; Han, G.; Zhu, C.; Chan, S.; Rodrigues, J.J. A trust cloud model for underwater wireless sensor networks. IEEE Commun. Mag. 2017, 55, 110–116. [Google Scholar] [CrossRef]
- Peng, C.; Du, X.; Li, K.; Li, M. An ultra-lightweight encryption scheme in underwater acoustic networks. J. Sens. 2016, 2016, 8763528. [Google Scholar] [CrossRef] [Green Version]
- Luo, Y.; Pu, L.; Peng, Z.; Shi, Z. RSS-based secret key generation in underwater acoustic networks: Advantages, challenges, and performance improvements. IEEE Commun. Mag. 2016, 54, 32–38. [Google Scholar] [CrossRef]
- Lončar, I.; Babić, A.; Arbanas, B.; Vasiljević, G.; Petrović, T.; Bogdan, S.; Mišković, N. A Heterogeneous Robotic Swarm for Long-Term Monitoring of Marine Environments. Appl. Sci. 2019, 9, 1388. [Google Scholar] [CrossRef] [Green Version]
- Saeed, H.; Ali, S.; Rashid, S.; Qaisar, S.; Felemban, E. Reliable monitoring of oil and gas pipelines using wireless sensor network (WSN)—REMONG. In Proceedings of the 2014 9th International Conference on System of Systems Engineering (SOSE), Adelade, Australia, 9–13 June 2014; pp. 230–235. [Google Scholar]
- Abbas, M.Z.; Bakar, K.A.; Arshad, M.A.; Tayyab, M.; Mohamed, M.H. Scalable Nodes Deployment Algorithm for the Monitoring of Underwater Pipeline. TELKOMNIKA (Telecommun. Comput. Electron. Control) 2016, 14, 1183–1191. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Agrawal, D.P. Linear wireless sensor networks: Classification and applications. J. Netw. Comput. Appl. 2011, 34, 1671–1682. [Google Scholar] [CrossRef]
- Abdul-Rahaim, L.A.; Ali, A.M.A. Remote Wireless Automation and Monitoring of Large Farm using wireless sensors networks and Internet. Int. J. Comput. Sci. Eng. Technol. 2015, 6, 118–137. [Google Scholar]
- Taniguchi, Y. Experimental evaluation of effect of turbidity on the performance of visible light communication in an underwater environment. Int. J. Simul. Syst. Sci. Technol. 2016, 17, 1–4. [Google Scholar]
- Ishida, K.; Taniguchi, Y.; Iguchi, N. A data gathering method considering volume of transmission range for fish farm monitoring. In Proceedings of the European Modelling Symposium (EMS), Pisa, Italy, 28–30 November 2016; pp. 181–185. [Google Scholar]
- Antonelli, G.; Caffaz, A.; Casalino, G.; Volpi, N.C.; De Jong, I.B.; De Palma, D.; Duarte, H.; Grimsdale, J.; Indiveri, G.; Jesus, S.; et al. The Widely scalable Mobile Underwater Sonar Technology (WiMUST) H2020 project: First year status. In Proceedings of the OCEANS 2016-Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–8. [Google Scholar]
- Kumar, S.; Perry, A.; Moeller, C.; Skvoretz, D.; Ebbert, M.; Ostrom, R.; Bennett, S.; Czipott, P. Real-time tracking magnetic gradiometer for underwater mine detection. In Proceedings of the Oceans’04 MTS/IEEE Techno-Ocean’04, Kobe, Japan, 9–12 November 2004; Volume 2, pp. 874–878. [Google Scholar]
- Kemna, S.; Hamilton, M.J.; Hughes, D.T.; LePage, K.D. Adaptive autonomous underwater vehicles for littoral surveillance. Intell. Serv. Robot. 2011, 4, 245. [Google Scholar] [CrossRef]
- Jain, N.; Virmani, D. Feature Classification for Underwater Seismic Prediction Using Wireless Sensor Nodes. In Proceedings of the International MultiConference of Engineers and Computer Scientists, Hong Kong, China, 15–17 March 2017; Volume 1. [Google Scholar]
- Santana Sosa, G.; Santana Abril, J.; Sosa, J.; Montiel-Nelson, J.A.; Bautista, T. Design of a Practical Underwater Sensor Network for Offshore Fish Farm Cages. Sensors 2020, 20, 4459. [Google Scholar] [CrossRef]
- Oh, S.H.; Tyan, S. Mobile UW-ASN framework with RSSI-based protocol for shallow river monitoring. Int. J. Risk Assess. Manag. 2014, 17, 361–373. [Google Scholar] [CrossRef]
- Loni, Z.M.; Espinosa, H.G.; Thiel, D.V. Floating monopole antenna on a tethered subsurface sensor at 433 MHz for ocean monitoring applications. IEEE J. Ocean. Eng. 2017, 42, 818–825. [Google Scholar] [CrossRef]
- Morozs, N.; Mitchell, P.D.; Zakharov, Y.; Mourya, R.; Petillot, Y.R.; Gibney, T.; Dragone, M.; Sherlock, B.; Neasham, J.A.; Tsimenidis, C.C.; et al. Robust TDA-MAC for practical underwater sensor network deployment: Lessons from USMART sea trials. In Proceedings of the Thirteenth ACM International Conference on Underwater Networks & Systems, Shenzhen, China, 3–5 December 2018; pp. 1–8. [Google Scholar]
- Cario, G.; Casavola, A.; Gjanci, P.; Lupia, M.; Petrioli, C.; Spaccini, D. Long lasting underwater wireless sensors network for water quality monitoring in fish farms. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–6. [Google Scholar]
- Munafó, A.; Ferri, G.; LePage, K.; Goldhahn, R. AUV active perception: Exploiting the water column. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–8. [Google Scholar]
- Wolek, A.; Dzikowicz, B.R.; McMahon, J.; Houston, B.H. At-sea evaluation of an underwater vehicle behavior for passive target tracking. IEEE J. Ocean. Eng. 2018, 44, 514–523. [Google Scholar] [CrossRef]
- Hernández, J.D.; Vidal, E.; Moll, M.; Palomeras, N.; Carreras, M.; Kavraki, L.E. Online motion planning for unexplored underwater environments using autonomous underwater vehicles. J. Field Robot. 2019, 36, 370–396. [Google Scholar] [CrossRef]
- Denniston, C.; Krogstad, T.R.; Kemna, S.; Sukhatme, G.S. On-line AUV Survey Planning for Finding Safe Vessel Paths through Hazardous Environments. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–8. [Google Scholar]
- Cao, X.; Guo, L. A leader–follower formation control approach for target hunting by multiple autonomous underwater vehicle in three-dimensional underwater environments. Int. J. Adv. Robot. Syst. 2019, 16. [Google Scholar] [CrossRef] [Green Version]
- Hossain, M.F.; Wali, M.B.; Munasinghe, K.S.; Jamalipour, A. Three dimensional (3D) underwater sensor network architectures for intruder localization using EM wave. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar]
- Caiti, A.; Calabro, V.; Munafo, A.; Dini, G.; Lo Duca, A. Mobile underwater sensor networks for protection and security: Field experience at the UAN11 experiment. J. Field Robot. 2013, 30, 237–253. [Google Scholar] [CrossRef] [Green Version]
- Allotta, B.; Bartolini, F.; Caiti, A.; Costanzi, R.; Di Corato, F.; Fenucci, D.; Gelli, J.; Guerrini, P.; Monni, N.; Munafò, A.; et al. Typhoon at CommsNet13: Experimental experience on AUV navigation and localization. Ann. Rev. Control 2015, 40, 157–171. [Google Scholar] [CrossRef]
- Vasilijević, A.; Nađ, Đ.; Mandić, F.; Mišković, N.; Vukić, Z. Coordinated navigation of surface and underwater marine robotic vehicles for ocean sampling and environmental monitoring. IEEE/ASME Trans. Mechatron. 2017, 22, 1174–1184. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Challenges for efficient communication in underwater acoustic sensor networks. ACM Sigbed Rev. 2004, 1, 3–8. [Google Scholar] [CrossRef]
- Chen, Y.; Ji, F.; Guan, Q.; Wang, Y.; Chen, F.; Yu, H. Adaptive RTO for handshaking-based MAC protocols in underwater acoustic networks. Future Gener. Comput. Syst. 2017, 86, 1185–1192. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Contributions | Previous Study | Proposed Study | ||||
|---|---|---|---|---|---|---|
| [3] | [4] | [5] | [6] | [7] | ||
| Underwater Sensor Networks Architecture | ✔ | ✔ | ✔ | ✔ | ✘ | ✔ |
| Platforms for UWSNs | ✘ | ✘ | ✔ | ✘ | ✔ | ✔ |
| Requirements of UWSNs | ✘ | ✘ | ✘ | ✘ | ✘ | ✔ |
| Thematic Taxonomy of UWSNs | ✘ | ✘ | ✘ | ✘ | ✘ | ✔ |
| Architectural Elements | ✘ | ✔ | ✔ | ✔ | ✘ | ✔ |
| Underwater Acoustic Communications | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| Routing Protocols | ✔ | ✘ | ✘ | ✘ | ✔ | ✔ |
| Security | ✘ | ✘ | ✘ | ✘ | ✘ | ✔ |
| Applications | ✘ | ✔ | ✔ | ✘ | ✘ | ✔ |
| Open Research Challenges | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| Abbreviation | Description |
|---|---|
| ADC | Analog-to-Digital |
| API | Application Programming Interface |
| AUVs | Autonomous Underwater Vehicles |
| DAC | Digital-to- Analog |
| DAQ | Data Acquisition |
| IIoT | Industry Internet of Things |
| IoT | Internet of Things |
| IoUT | Internet of Underwater Things |
| M2M | Machine-to-Machine |
| Mbps | Megabits per second |
| ROVs | Remotely Operative Underwater Vehicles |
| SDN | Software Define Networking |
| SOFAR | Sound Fixing and Ranging |
| TTL | Time to live |
| UWSNs | Underwater Wireless Sensor Networks |
| WSN | Wireless Sensor Networks |
| Author | Algorithm | Objective | Deployment Criteria | ||
|---|---|---|---|---|---|
| Energy Consumption | Coverage | Connectivity | |||
| [35] | Self-deployment Particle swarm | Optimize events coverage | Yes | Yes | Yes |
| [36] | Construction of initial infrastructure | Node placement strategy to minimize transmission cost | No | Yes | Yes |
| [37] | Uneven cluster deployment | Improves network reliability and prolongs network lifetime | Yes | Yes | Yes |
| [38] | Fisher information matrix (FIM) | Target positioning precision | Yes | No | No |
| [39] | A three-dimensional coverage pattern and deployment scheme | Preserve network coverage | Yes | Yes | Yes |
| [32] | Game theory | Optimize mobility of nodes and targets | No | Yes | Yes |
| [40] | Integration of a realistic model and gradient descent method | Improve sensor node placement | Yes | Yes | No |
| [41] | Multiobjective optimization framework | optimal deployment of a sparse network of sensors against moving targets | No | Yes | Yes |
| [42] | Autonomous deployment algorithm for k-barrier coverage | Utilize self-deployment method to improve coverage | Yes | Yes | Yes |
| [43] | Greedy Iterative Approach (GFCND) | Improve network connectivity and coverage | Yes | Yes | Yes |
| [44] | Stratified Connected Tree | Optimize leaf nodes position to improve coverage and connectivity | Yes | Yes | Yes |
| Author | Method | Description | Environmental Parameters | System-Parameter | Advantages |
|---|---|---|---|---|---|
| [57] | Relative positioning system | the propagation times of acoustic used to measure the position of buoys | temperature, depth, salinity, bottom and water densities, wind speed or sound speed at bottom material | signal frequency, hydrophones’ depth, the aperture angle of the transducer or the position of the buoys | Able to understand the region surface current |
| [58] | Adaptation of data and model-based framework | apply a high-fidelity acoustic modeling infrastructure | Sea state, Sea floor depth | Source and receiver (Buoy) depth and speed, Source Level, Frequency (carrier), Bandwidth, Modulation | A set of behaviors able to extend the decision of typical behavior-based systems |
| [59] | An intelligent online framework for communication environment changes | Provide database tracks for communications layer visibility | Bathmetry, bottom type, water column | Mission Path Size, Ambient Noise, Sound Speed Profile, Vehicle Type | can provide acoustic modem optimization for collaborative AUV missions |
| [60] | A C-SLAM algorithm | communication packets generation with observed features | Doppler velocity | Strategy, design measurements | Allow associating the uncertainties position of vehicles without infrastructure |
| [61] | A decentralized formation control algorithm | Maintain the distance and angle without relies on leader robot information | location of the obstacle | avoidance layer, formation generation layer | Enable shortening the procedure of the information process |
| [62] | A data-driven method | Minimize the target location error of the onboard tracker | sound speed, noise level, reflection loss gradient, maximum depth | prediction steps, step time length, heading choices, maximum heading change decisions | ability to handle outliers and computational limitations |
| [63] | A software/hardware hybrid system | Real-time AUVs operation with acoustic modem telemetry | Ocean model, acoustic model | Communication model | The design is flexible to existing and new modems |
| [64] | stochastic level-set partial differential equations | calculate stochastic reliability in three different scenarios | Wind stress, ocean flows | vehicle-speed | the vehicles can move in unreliable flows of coastal ocean |
| Energy Efficient Protocol | Methodology | Advantages | Requirements | Performance |
|---|---|---|---|---|
| Joint Routing and Energy Management [65] | Minimize nodes communication energy throughout data transmission process | Balance energy distribution of all nodes | Next hops address, node capacity and low energy data transmission | Fair |
| DRP [66] | Find a path with high energy and transmission rate | Prolongs network lifetime, improve throughput | Periodic broadcast of HELLO packets | High |
| E-CBCCP [67] | Consider energy of the cluster heads | Reduce nodes communication cost and high network lifetime | Ocean environment is stable | Fair |
| EBET & EEBET [68] | Selection of high energy node | Practical for large scale network | Predetermined location of sensor nodes | Fair |
| E-CARP [69] | Allows the previous collected data to be stored at the sink node | Effective communication cost; Minimize energy consumption | Predefined location of both sensor and sink nodes | High |
| EBECRP [70] | Exploit the use of mobile sinks | Prolong network lifetime by reducing number of data transmissions | Sinks have knowledge of sparse and dense regions | Fair |
| SEEC, CSEEC & CDSEEC [71] | Perform clustering and the used of sink mobility | Minimize the energy consumption of sparse regions | Depth threshold of each node is 25 m | Fair |
| Category | Protocol | Void Avoidance | Improve Data Delivery Ratio | Energy Efficiency | Multi Hop | Mobile /Static Nodes | Multiple/Single Sink | Location is Known | Cluster or Single Entity |
|---|---|---|---|---|---|---|---|---|---|
| Adaptive | SACRP [72] | No | ✔ | ✔ | Yes | Static | Single | Yes | Single |
| AHH-VBF [73] | No | ✔ | ✔ | No | Both | Single | Yes | Single | |
| iAMCTD [74] | No | ✔ | ✔ | No | Mobile | Multiple | No | Single | |
| AVN-AHH-VBF [75] | Yes | ✔ | ✔ | Yes | Static | Single | Yes | Single | |
| QL-EEBDG [76] | No | ✔ | ✔ | No | Static | Multiple | Yes | Single | |
| Geographic & Opportunistic | EnOR [77] | No | ✔ | ✔ | Yes | Static | Single | Yes | Single |
| Co-improved Hydrocast [78] | Yes | ✔ | ✔ | No | Static | Multiple | Yes | Single | |
| VHGOR [79] | Yes | ✔ | ✔ | No | Static | Single | Yes | Single | |
| GEDAR [80] | Yes | ✔ | ✔ | Yes | Mobile | Single | Yes | Cluster | |
| GGFGD & GFGD [81] | No | ✘ | ✔ | Yes | Static | Single | Yes | Single | |
| 3DRanDomProb [82] | No | ✔ | ✘ | Yes | Mobile | Single | No | Single | |
| Cross-Layer | cross-layer protocol stack [83] | No | ✔ | ✔ | Yes | Static | Single | Yes | Cluster |
| NCRP [84] | Yes | ✔ | ✔ | Yes | Static | Single | Yes | Cluster | |
| VBF-improve [85] | No | ✘ | ✔ | No | Mobile | Single | Yes | Single | |
| Cooperative | Co-UWSN [86] | Yes | ✔ | ✔ | Yes | Mobile | Multiple | Yes | Single |
| NC [87] | No | ✘ | ✔ | Yes | Static | Multiple | No | Single | |
| S-DCC [88] | No | ✘ | ✔ | Yes | Static | Multiple | No | Single | |
| HAMA [89] | Yes | ✘ | ✔ | Yes | Mobile | Single | Yes | Cluster | |
| CoDBR [90] | No | ✘ | ✔ | Yes | Mobile | Multiple | Yes | Cluster | |
| EOCA [91] | No | ✔ | ✔ | Yes | Mobile | Single | Yes | Cluster | |
| SPARCO [92] | No | ✔ | ✔ | Yes | Mobile | Single | Yes | Cluster | |
| Artificial Intelligence Related | QKS [93] | No | ✘ | ✔ | No | Mobile | Single | Yes | Cluster |
| QELAR [94] | No | ✘ | ✔ | Yes | Mobile | Single | Yes | Single | |
| UW-ALOHA-Q [95] | No | ✔ | ✔ | Yes | Static | Multiple | Yes | Single |
| Reference | Application | Network Deployment | Communication | Sensor Node | |||||
|---|---|---|---|---|---|---|---|---|---|
| Salinity Level | Network size | Operable Depth | Channel Frequency | Type | Type | Distance | Number | ||
| [116] | Fish farm | Ocean | Up to 2.4 km | 30 m | 26.8 kHz | RF, Acoustic | Static | 6 m | 5 |
| [117] | River Monitoring | River | 5000 m × 200 m | 50 m | 35 kHz | Acoustic | Mobile | 300 m | 2 |
| [118] | Ocean Monitoring | Shallow Water | 90 × 38 × 45 cm | Up to 3 m | 433 MHz | RF, Acoustic | Static | 15 cm | 2 |
| [119] | Environmental Monitoring | Sea | Up to 2 km | 2 m | 28 kHz | RF, Acoustic | Static | 100 m | 3 |
| [120] | Water Quality | Sea | 4500 to 5500 m3 | 45 m | 25 to 40 KHz | RF, Acoustic | Static | 110 m | 3 |
| [121] | Surveillance | Sea | 23 km × 30 km × 300 m | 50 m | 1 kHz to 4 kHz | Acoustic | Mobile | 75 m | 2 |
| [122] | Target Tracking | Sea | Up to 1 km | 32 m | 2 kHz | Acoustic | Mobile | 300 m | 2 |
| [123] | Exploration | Sea | 14.5 m × 12 m | 2 m | 2 kHz | Acoustic | Mobile | 10 m | 3 |
| [124] | Survey Planning | Sea | 600 m × 600 m | 20 m | 1 kHz to 4 kHz | Acoustic | Mobile | 10 m | 2 |
| [125] | Target Tracking | Sea | 30 m × 30 m × 25 m | 25 m | 2 kHz | Acoustic | Mobile | 4 m | 6 |
| [126] | Surveillance | Sea | 400 m × 400 m × 400 m | 20 m | 3 kHz | RF, Acoustic | Static | 20 m | 4 |
| [127] | Surveillance | Ocean | Up to 3 km | 90 m to 98 m | 25.6 kHz | RF, Acoustic | Static, Mobile | No Info | 7 |
| [128] | Exploration | Sea | 600 m × 900 m | Up to 80 m | 3 kHz | Acoustic | Mobile | 75 m | 2 |
| [129] | Ocean Sampling | Ocean | 500 m × 500 m | 10 m | 2 kHz | Acoustic | Mobile | 10 m | 2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fattah, S.; Gani, A.; Ahmedy, I.; Idris, M.Y.I.; Targio Hashem, I.A. A Survey on Underwater Wireless Sensor Networks: Requirements, Taxonomy, Recent Advances, and Open Research Challenges. Sensors 2020, 20, 5393. https://doi.org/10.3390/s20185393
Fattah S, Gani A, Ahmedy I, Idris MYI, Targio Hashem IA. A Survey on Underwater Wireless Sensor Networks: Requirements, Taxonomy, Recent Advances, and Open Research Challenges. Sensors. 2020; 20(18):5393. https://doi.org/10.3390/s20185393
Chicago/Turabian StyleFattah, Salmah, Abdullah Gani, Ismail Ahmedy, Mohd Yamani Idna Idris, and Ibrahim Abaker Targio Hashem. 2020. "A Survey on Underwater Wireless Sensor Networks: Requirements, Taxonomy, Recent Advances, and Open Research Challenges" Sensors 20, no. 18: 5393. https://doi.org/10.3390/s20185393
APA StyleFattah, S., Gani, A., Ahmedy, I., Idris, M. Y. I., & Targio Hashem, I. A. (2020). A Survey on Underwater Wireless Sensor Networks: Requirements, Taxonomy, Recent Advances, and Open Research Challenges. Sensors, 20(18), 5393. https://doi.org/10.3390/s20185393