A Low-Cost Automatic Vehicle Identification Sensor for Traffic Networks Analysis

 , ,
, ,  ,
,  , and
, and
Abstract
:1. Introduction
1.1. The Purpose and Significance of This Paper
- Sensors for punctual data collect traffic information at a single point of the road, and can be designed to obtain information for each single vehicle (e.g., vehicle presence, speed, or type), or for the vehicles in a defined time interval (e.g., vehicles count, average speed, vehicles occupancy, etc.). In addition, these sensors can be
- ○
- “Passive sensors” do not require any active information provided from a vehicle, i.e., they collect the information when a vehicle is passing in front of the sensor. In particular:
- ▪
- “Passive fixed sensors” have a fixed position on the network. This group includes inductive loop detectors, magnetic detectors, pressure detectors, piezoelectric sensors, microwave radars, among others. These sensors are used to manage the traffic and can also be used to elaborate traffic mobility plans using only the already installed fixed sensors if the available budget is limited.
- ▪
- “Passive portable sensors” have a fixed position on the network, but they are installed for a defined-short period of time. This group includes counters made with rubber hoses or manual counters that are used for example to elaborate traffic mobility plans completing the information provided by fixed sensors.
- ○
- “Active sensors” require active information from the vehicle to be univocally identified. In fact, these sensors can be included under the term “automatic vehicle identification” (AVI). As well as the passive sensors they can be fixed or portable:
- ▪
- “Active fixed sensors” have a fixed position on the network. This group includes automatic number plate recognition (ANPR) sensors, Bluetooth sniffer of bar-coded tags. Despite these sensors being designed for other purposes far from the traffic network analysis, recent researches have begun to use the data collected by these sensors to estimate traffic flows.
- ▪
- “Active portable sensors” have to be designed to be installed for a very short period of time to take info from vehicles. As far as we know this kind of sensor has a very limited use for traffic management and more for Police controls, such as ANPR sensors, both those that are temporarily installed on the road and those installed on vehicles (although this latter could be also considered as in-vehicle sensors).
- “Sensors for section data” are those that collect information in different sections on the network providing the number of vehicles traveling from different points in the network, travel times between these points, entrances and exits between reidentification devices, etc. This group includes mainly sensors for license plate recognition, but other approaches that allow vehicle re-identification to match measurements at two (or more) data collection sites that belong to the same vehicle. In general, all these sensors are installed fixed in the network.
1.2. State of the Art of Sensors for ANPR
- Vehicle image capture: This step has a critical impact on the subsequent steps since the final result is highly dependent on the quality of the captured images. The task of correctly capturing images of moving vehicles in real time is complex and subject to many variables of the environment, such as lighting, vehicle speed, and angle of capture.
- Number plate detection: This step focuses on the detection of the area in which a number plate is expected to be located. Images are stored in digital computers as matrices, each number representing the light intensity of an individual pixel. Different techniques and algorithms give different definitions of a number plate. For example, in the case of edge detection algorithms, the definition could be that a number plate is a “rectangular area with an increased density of vertical and horizontal edges”. This high occurrence of edges is normally caused by the border plates, as well as the limits between the characters and the background of the plate.
- Character segmentation: Once the plate region has been detected, it is necessary to divide it into pieces, each one containing a different character. This is, along with the plate detection phase, one of the most important steps of ANPR, as all subsequent phases depend on it. Another similarity with the plate detection process is that there is a wide range of techniques available, ranging from the analysis of the horizontal projection of a plate, to more sophisticated approaches such as the use of neural networks.
- Character recognition: The last step in the ANPR process consists in recognizing each of the characters that have been previously segmented. In other words, the goal of this step consists in identifying and converting image text into editable text. A number of techniques, such as artificial neural networks, template matching or optical character recognition, are commonly employed to address this challenge. Since character recognition takes place after character segmentation, the recognizer system should deal with ambiguous, noisy or distorted characters obtained from the previous step.
1.3. Contributions of This Paper
- A novel architecture to deploy low-cost sensor networks able to automatically recognize plate numbers, which can be temporarily installed on city streets as an alternative to rubber hoses commonly used in the elaboration of urban mobility plans.
- A design of a low-cost, low-energy sensor composed of a number of hardware components that provides flexibility to conduct urban mobility experiments and minimize the impact on maintenance, installation, and operability.
- A methodology to locate the sensors able to establish the best set of links of a network given both the study objectives and of the sensor needs of installation. This model integrates the estimation of traffic flows from the data obtained by the proposed sensors and also establishes the best set of links to locate them taking into account the special characteristics of its installation. Furthermore, using the proposed methodology, we have proved that the expected quality of the traffic flow estimation results are very similar if the sensor can be located in any link compared with avoiding links with certain problems to install the sensor.
2. The Proposed Low-Cost ANPR System for Traffic Networks Analysis
2.1. Architecture to Deploy Low-Cost Sensor Networks
2.1.1. General Overview
- The perceptual layer, which integrates the self-contained sensors responsible for image capture. Each of these sensors integrates a low-power processing device and a set of low-cost devices that carry out the image capture. The used camera enables different configurations depending on the characteristics of the urban environment in which the traffic analysis is conducted.
- The smart management layer, which provides the necessary functionality for the definition and execution of traffic analysis experiments. This layer integrates the functional modules responsible for the configuration of experiments, the automatic detection of license plates, from the images provided by the sensors of the perceptual layer, and the permanent storage of information in the system database.
- The online monitoring layer, which allows the visualization, through a web browser, of the evolution of an experiment as it is carried out. Thanks to this layer, it is possible to query the state of the different sensors of the perceptual layer, through interactions via the smart management layer.
2.1.2. Perceptual Layer
2.1.3. Smart Management Layer
- Client ID. Unique ID of the sensor that sends the packet within the sensor network.
- Timestamp. Temporal mark associated with the time when the sensor captured the image.
- Latency. Latency regarding the previously sent control packet. Its value is 0.0 for the first control packet.
- Plates. List of candidate plate numbers, together with their respective confidence values, detected in the image captured by the sensor.
- Image. Binary serialization of the image captured by the sensor.
- Experiment definition module: This module is responsible for managing high-level information linked to a traffic analysis experiment. This information includes the start/end times of the experiment and the configuration of the parameters that guide the operation of the perceptual layer sensors. This configuration is retrieved by each of these sensors through a web request when they start their activity, so that it is possible to adjust it without modifying the status of the sensors each time it is necessary.
- Processing module: This module provides the functionality needed to effectively perform automatic license plate detection. Thus, the input of this module is a set of images, in which vehicles can potentially appear, and the output is the set of detected plates, together with the degree of confidence associated with those detections. In the current version of the system, the commercial, web version OpenALPR library is used [26]. This module is responsible for attending the image analysis requests made by the sensors of the perceptual layer. Both the images themselves and the license plate detections associated with them are reported to the database management and storage module.
- Database management and storage module: This module allows the permanent storage of all the information associated with a traffic analysis and automatic license plate detection experiment. At a functional level, this module offers a forensic analysis service of all the information generated as a result of the execution of an experiment.
2.1.4. Online Monitoring Layer
- Overview of the system status: Through a grid view, the user can visualize a subset of sensors in real time. This view is designed to provide a high level visual perspective of the sensors deployed in a traffic analysis experiment. It is possible to configure the number of components of the grid.
- Analysis of the state of a sensor: This view makes it possible to know the status, in real time, of one of the previously deployed sensors (see Figure 3). In addition to visualizing the last image captured by the sensor, it is possible to obtain global statistics of the obtained data and the generated information if an online analysis is performed.
2.1.5. Systematic Requirements
- Scalability, defined as the architectural capacity and mechanisms provided to integrate new components.
- Availability, defined as the system robustness, the detection of failures, and the consequences generated as a result of these failures.
- Evolvability, defined as the system response when making software or hardware modifications.
- Integration, defined as the capacity of the architecture to integrate new devices.
- Security, defined as the ability to provide mechanisms devised to deal with inadequate or unauthorized uses of the deployed sensor networks.
- Manageability, defined as the capacity to interact between the personnel responsible to conduct the experiments and the software system.
2.2. Low Cost Sensor Prototype Description
2.2.1. Production Cost
- Raspberry Pi Zero W: €11.97
- Raspberry Pi Camera Module V2.1: €23.63
- Power bank PowerAdd Slim2 5000 mAh: €8.29
- 3D plastic box (PLA): €1.18
- MicroSD card U1 16 GB: €6.49
- Memory stick 128 MB: €1.97
- Tripod: €10.74
2.2.2. Energy Cost
2.2.3. Maintenance, Installation, and Operability
- {
- “begTime”: “2020-06-10T09:00:00”,
- “endTime”: “2020-06-10T11:00:00”,
- “resolution”: “1024x720”,
- “mode”: “manual”,
- “exposure_time”: 1000,
- “freq_capture”: 1000,
- “iso”: 320,
- “rectangle_p1”: [
- 280,
- 262
- ],
- “rectangle_p2”: [
- 1024,
- 574
- ]
- }
2.2.4. Information Processing
2.3. Methodology to Locate ANPR Sensors in a Traffic Network
2.3.1. Algorithm 1: Traffic Network Modelling
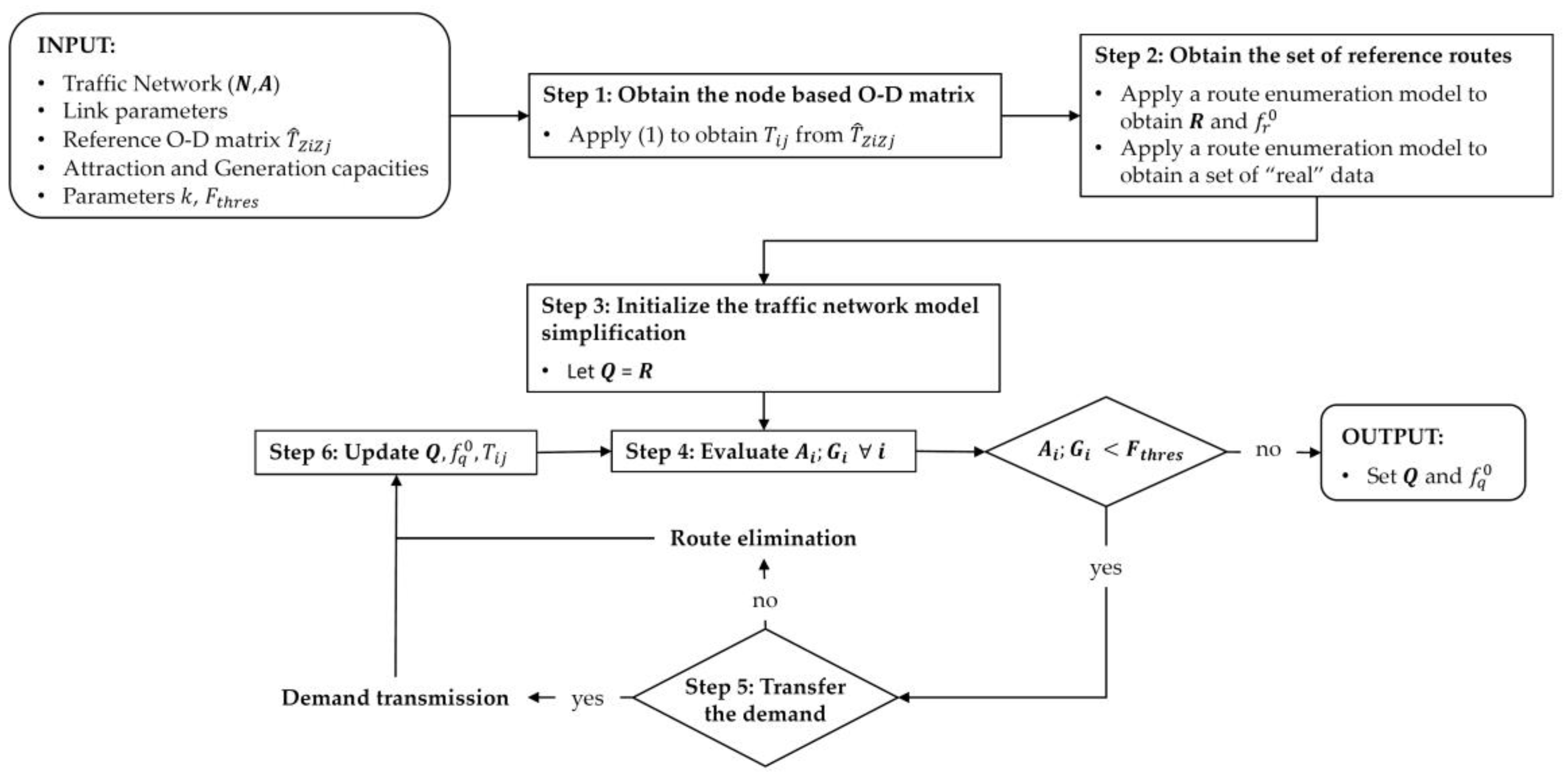
- INPUT: A traffic network (,) and its link parameters (links cost, links capacities, etc.); an out-of-date O–D matrix defined by traffic zones; capacities of links to attract and generate trips; the parameter of the MNL assignment model; and the threshold flow () to simplify the node-based O–D matrix and its corresponding routes.
- OUTPUT: A set of representative routes of the network and its corresponding route flow , and a set of “real” data necessary to check the efficiency of the estimation.
- STEP 1:
- Obtain the node-based O–D matrix: Given an O–D matrix by traffic zones in the network, and from some data on the attraction and trip generation capacities of the links that form it (see [13] for more details), it is possible to obtain an extended O–D matrix by nodes, defined as follows:where is the number of trips from node to node ; is the number of trips from zone of node to the zone of node ; is the proportion of attracted trips at node ; and is the proportion of generated trips at node which depends on its capacity to attract or to generate trips.
- STEP 2:
- Obtain the set R of reference routes: After defining the O–D matrix, an enumeration model, based on Yen’s k-shortest path algorithm [38], is used to define those -shortest routes between nodes, which are then assigned to the network through a MNL Stochastic User assignment model. This model makes it possible to build an “exhaustive reference set of routes” between nodes, with its respective route flows ,which will be operated by the algorithm, and whose size will vary according to the value adopted by the parameter . Along with these reference data, other data considered as “real” will also be defined that will serve to check the effectiveness of the model in the flow estimation results obtained from the information collected by the sensors.
- STEP 3:
- Initialize the traffic network model simplification: The intention of this step is to adapt the modelled traffic network as close to the actual network as possible, simplifying those routes by O–D pairs whose attraction/generation trip flow is below a given threshold flow value. To do this, we initialize the set of modelled routes to the set of reference routes.
- STEP 4:
- Evaluate the trip generations or attractions of the nodes: The algorithm evaluates the trips generated and/or attracted of each node of the network and compares them with the threshold flow value . If there is any node that holds this condition, go to Step 5, otherwise the algorithm ends and a simplified set of routes will be obtained, whose size will be a function of the value of the flow considered.
- STEP 5:
- Transfer the demand: The node that meets with the condition in Step 4, would lose its generated/attracted demand, which would also imply that no route could begin or end from that node. Therefore, it will be necessary to transmit these flow routes to another node close enough (which could receive or emit demand) with an implicit route, whenever possible. If the demand transfer could not be carried out, the evaluated demand is lost and all the involved routes as well.
- STEP 6:
- Update the set of routes: . The set and its associated flows have to be updated with the deleted or updated routes. The O–D Matrix must also be updated. Go to Step 4.
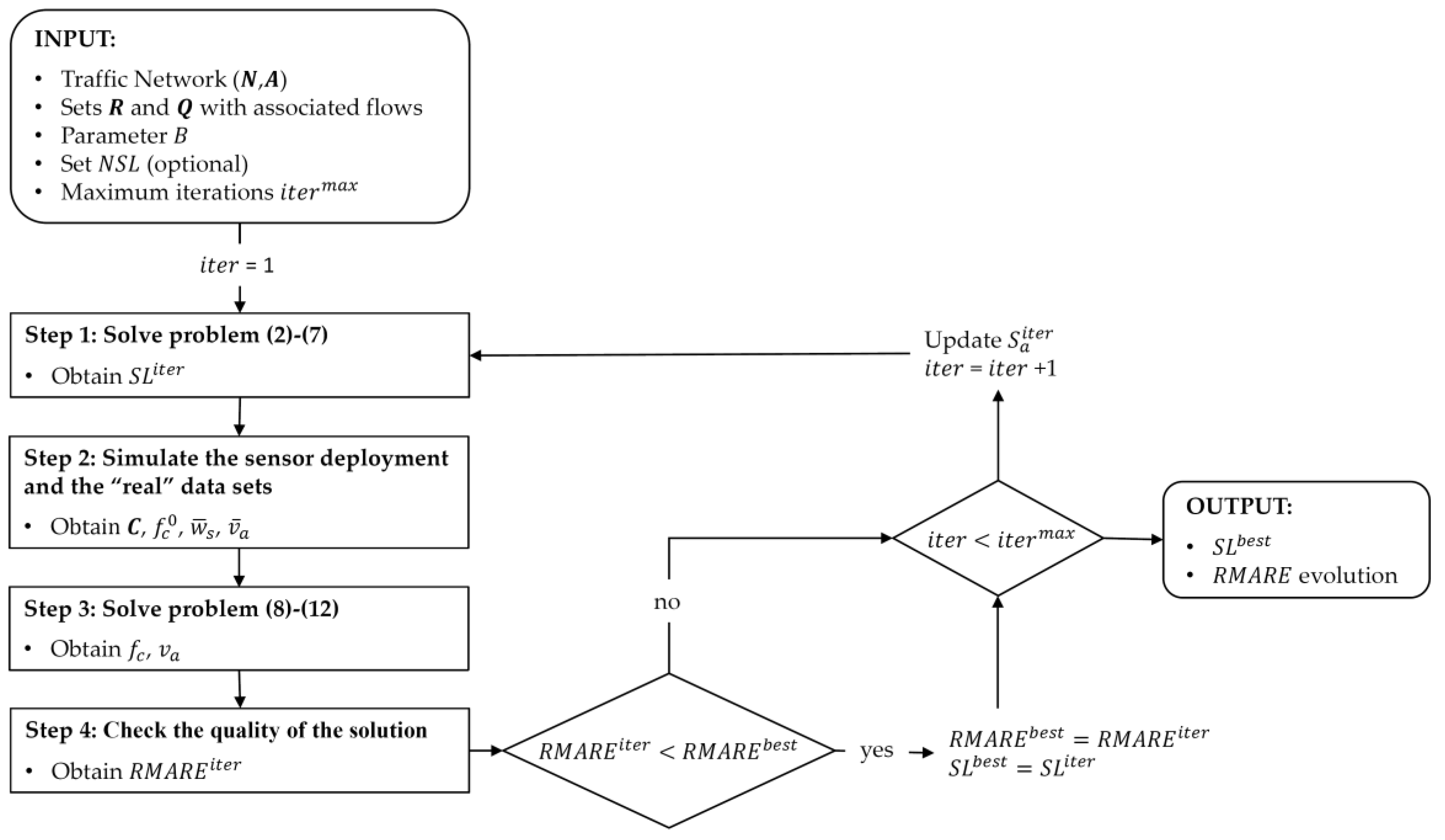
2.3.2. Algorithm 2: The ANPR Sensor Location Model
- INPUT: A traffic network (,); Sets of routes and , with their associated flows; the budget to install sensors ; an optional set of non-candidate scanned links ; and maximum number of iterations to be performed .
- OUTPUT: The set of scanned links and the evolution of the value according to the performed iterations.
- STEP 1:
- Solve the optimization problem: The following optimization problem has to be solved:subjected toThe objective function (2) maximizes the distinguished route flow in terms of ; is a binary variable equal to 1 if a route can be distinguished from others and 0 otherwise. Constraint (3) satisfies the budget requirement, where is a binary variable that equals 1 if link is scanned and 0 otherwise. This constraint guarantees that we will have a number of scanned links with a cost for link that does not exceed the established limited budget .Constraint (4) ensures that any distinguished route contains at least one scanned link. This constraint is indicated by the parameter , which is the element of the incidence matrix. Constraint (5) is related to the previous constraint since it indicates the exclusivity of routes: a route must be distinguished from the other routes in at least one scanned link a. If + = 1, this means that the scanned link only belongs to route or route . If and = 1, then at least one scanned link has this property; on the other hand, if = 0, then the constraint always holds.Constraint (6) is an optional constraint that allows a link to not be scanned if it belongs to a set of links not suitable for scanning . This restriction will make the binary variable equal to 0, and therefore a sensor cannot be located on it. The intention of defining this constraint will be discussed with more detail in the next section.Finally, since this model is part of an iteration process (see [13] for more details), an additional constraint (7) is proposed, which allows us to obtain different solutions of sets for each iteration performed through the definition of , which is a matrix that grows with the number of iterations , in which each row reflects the set resulting from each iteration carried out up to then by the model. Therefore, if an element of is 1, means that link was proposed to be scanned in the solution provided on iteration and 0 otherwise. Each iteration keeps the previous solutions and does not permit the process to repeat a solution in future iterations. That is, each iteration carried out by the algorithm is forced to search for a different solution with the same objective function (2).
- STEP 2:
- Simulate the sensor deployment and the “real” data sets: After obtaining the set , the numerical simulation of it on the traffic network is carried out with the flow conditions given by an assumed “real” condition. One of the main features introduced in that algorithm is the possibility of working with a set of routes not fixed. Until now, the sensor location and flow estimation models have been formulated considering a set of existing fixed and non-changing routes. In the proposed model, each set may allow to obtain different observed set of combinations of scanned links () used by the vehicles (i.e., sets of links where vehicles have been registered), denoted by . Since the modelled network and routes are not always the same as in reality, not all sets in are compatibles with set of routes and hence new routes have to be added conforming a new global set that encompasses the routes in and the new ones, with their associated flows . To define these new sets from new routes discovered from this simulation, the algorithm looks for and assimilates their compatibility with those routes from set that were eliminated in the simplification step of Algorithm 1 (see [13] for more detail). With this step, each set of observed combinations of scanned links will provide the observed flow values as the input data for the estimation model. In addition, apart from allowing to quantify the flow in routes from the scanned sets of links, these sensors behave as traffic counters in the link where they are installed, making it easier to quantify the flow in the link as well .
- STEP 3:
- Obtain the remaining traffic flows: In this step, a traffic flow estimation of the remaining flows is performed where route () and links () flows are obtained from reference flows () and the observed flows ( and ). We propose to use a Generalized Least Squares (GLS) optimization problem [14,15], as follows:subjected towhere and are the inverses of the variance–covariance matrices corresponding to the flow in route and the observed flow in link a; is the observed flow in each set ; is the estimated flow of routes in set ; and are the corresponding incidence matrices of relationship between observed link sets and links with routes.
- STEP 4:
- Check the quality of the solution. Once the flow estimation problem has been resolved, the quality of the solution in absolute terms, can be quantified as follows:where is the root mean absolute value relative error; is the number of links in the network; and and are the estimated flow and (assumed) real flow for link . Such error is calculated over the link flows since the number of them remain constant regardless of the network simplification and the set used. Each value of indicates the quality of the estimation by using the set for the traffic network. As said above, due to the complexity of the problem, it has not a unique solution so we propose to evaluate a great amount of combined solutions in an iterative process. This iterative process, which is shown in Figure 9, is carried out since Step 1 a number of iterations equal to the maximum considered . For the solution found in the first iteration, the value of will be considered as the best, but in the following iteration, the algorithm could find another solution with lower value of and it will be considered as best. All the solution found and tested in each iteration are stored in matrix, which grows in size during the performance. Finally, the best solution or set , for the established conditions, will be the one provided with the lower value.
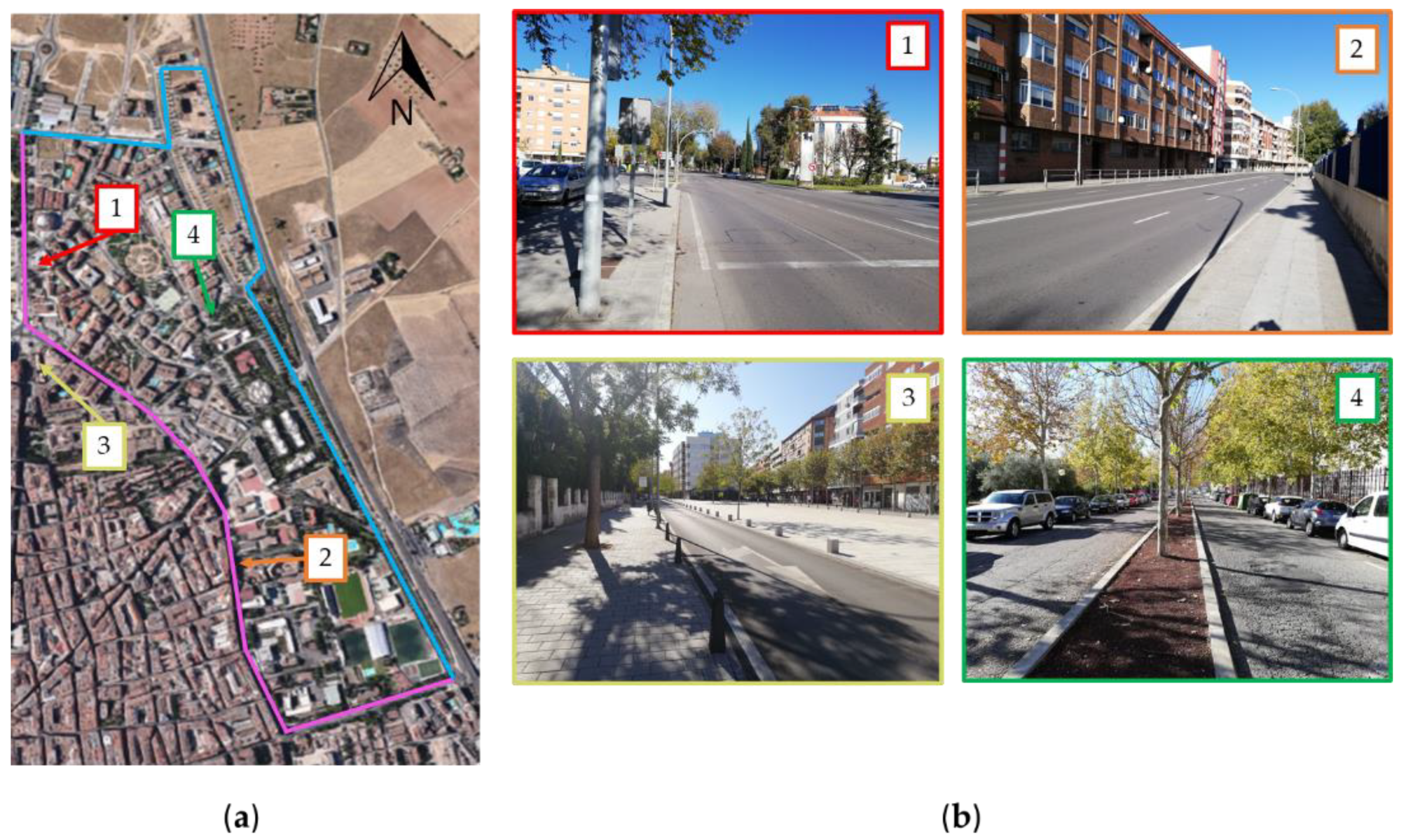
3. The Application of the Proposed System in a Pilot Project
3.1. Description of the Project and Particularities about the Position of Sensors in the Streets
3.2. Analysis of the Results
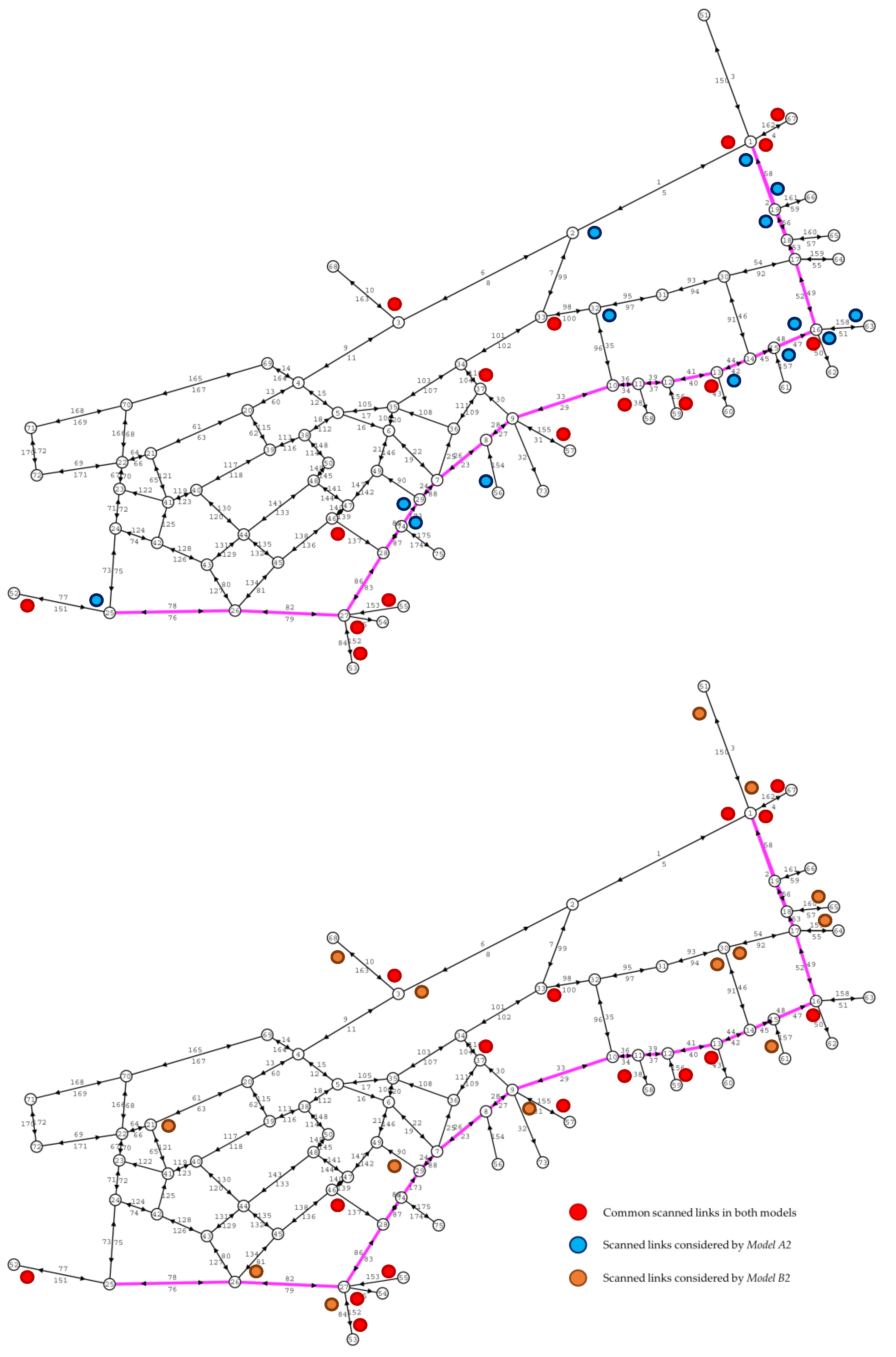
- An analysis of the effect on the estimation of flows is performed when considering different values for the definition of set (Step 2 of Algorithm 1). We have considered two values: 2 and 3.
- An analysis over the variation of the value of the threshold flow that is used in the simplification algorithm is done (Steps 4 to 6 of Algorithm 1). Depending on the value of this threshold value, the degree of simplification of the network will be greater or lesser, affecting the number of considered routes in .
- An analysis to verify the effect of considering a certain set of links as not suitable to locate the scanning sensor (Equation (6) in Step 1 of Algorithm 2).
3.2.1. Effect of Varying the Parameter
3.2.2. Effect of Network Simplification
4. Conclusions
- Production/Manufacturing: The unit cost of the hardware components for the realization of the prototype is less than €60 (considering the tripod as an extra accessory). In the case of integration for large scale manufacturing, these could be significantly reduced.
- Installation: The sensors have a very low energy consumption, which allows their deployment in any location and without specific energy supply infrastructure. The platform allows adapting the sensor parameters (resolution, lighting levels, shutter speed, and compression level) to the specific needs of each location.
- Maintainability and scalability: The proposed architecture allows working with any existing ANPR library in the market by delegating tasks between processing layers, as well as their combination to improve the overall success rate. The detection stage is delegated to the smart management layer, reducing overall costs, and providing more scalable and efficient solutions.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Guerrero-Ibáñez, J.A.; Zeadally, S.; Contreras-Castillo, J. Sensor Technologies for Intelligent Transportation Systems. Sensors 2018, 18, 1212. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Jiang, C.; Han, Z.; Ren, Y.; Hanzo, L. Internet of Vehicles: Sensing-Aided Transportation Information Collection and Diffusion. IEEE Trans. Veh. Technol. 2018, 67, 3813–3825. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Jiang, C.; Zhang, K.; Quek, T.Q.; Ren, Y.; Hanzo, L. Vehicular Sensing Networks in a Smart City: Principles, Technologies and Applications. IEEE Wirel. Commun. 2017, 25, 122–132. [Google Scholar] [CrossRef] [Green Version]
- Gentili, M.; Mirchandani, P.B. Review of optimal sensor location models for travel time estimation. Transp. Res. Part C Emerg. Technol. 2018, 90, 74–96. [Google Scholar] [CrossRef]
- Auberlet, J.-M.; Bhaskar, A.; Ciuffo, B.; Farah, H.; Hoogendoorn, R.; Leonhardt, A. Data collection techniques. In Traffic Simulation and Data. Validation Methods and Applications; CRC Press: Boca Raton, FL, USA, 2014; pp. 5–32. [Google Scholar]
- Li, X.; Ouyang, Y. Reliable sensor deployment for network traffic surveillance. Transp. Res. Part B Methodol. 2011, 45, 218–231. [Google Scholar] [CrossRef]
- Anagnostopoulos, C.-N.; Anagnostopoulos, I.; Psoroulas, I.; Loumos, V.; Kayafas, E. License plate recognition from still images and video sequences: A survey. IEEE Trans. Intell. Transp. Syst. 2008, 9, 377–391. [Google Scholar] [CrossRef]
- Sonavane, K.; Soni, B.; Majhi, U. Survey on automatic number plate recognition (anr). Int. J. Comput. Appl. 2015, 125, 1–4. [Google Scholar] [CrossRef]
- Patel, C.; Shah, D.; Patel, A. Automatic number plate recognition system (anpr): A survey. Int. J. Comput. Appl. 2013, 69, 21–33. [Google Scholar] [CrossRef]
- Ullah, F.; Anwar, H.; Shahzadi, I.; Rehman, A.U.; Mehmood, S.; Niaz, S.; Awan, K.; Khan, A.; Kwak, D. Barrier Access Control Using Sensors Platform and Vehicle License Plate Characters Recognition. Sensors 2019, 19, 3015. [Google Scholar] [CrossRef] [Green Version]
- Castillo, E.F.; Conejo, A.J.; Menéndez, J.M.; Jiménez, M.D.P. The observability problem in traffic network models. Comput. Civ. Infrastruct. Eng. 2008, 23, 208–222. [Google Scholar] [CrossRef]
- Cerrone, C.; Cerulli, R.; Gentili, M. Vehicle-ID sensor location for route flow recognition: Models and algorithms. Eur. J. Oper. Res. 2015, 247, 618–629. [Google Scholar] [CrossRef]
- Sánchez-Cambronero, S.; Álvarez-Bazo, F.; Rivas, A.; Gallego, I. A new model for locating plate recognition devices to minimize the impact of the uncertain knowledge of the routes on traffic estimation results. J. Adv. Transp. 2020, 2020, 1–20. [Google Scholar] [CrossRef]
- Castillo, E.F.; Nogal, M.; Rivas, A.; Sánchez-Cambronero, S. Observability of traffic networks. Optimal location of counting and scanning devices. Transp. B Transp. Dyn. 2013, 1, 68–102. [Google Scholar] [CrossRef]
- Mínguez, R.; Sánchez-Cambronero, S.; Castillo, E.F.; Jiménez, M.D.P. Optimal traffic plate scanning location for OD trip matrix and route estimation in road networks. Transp. Res. Part B Methodol. 2010, 44, 282–298. [Google Scholar] [CrossRef]
- Istin, C.; Pescaru, D.; Doboli, A. Stochastic Model-Based Heuristics for Fast Field of View Loss Recovery in Urban Traffic Management Through Networks of Video Cameras. IEEE Trans. Intell. Transp. Syst. 2011, 12, 895–907. [Google Scholar] [CrossRef]
- Castillo, E.F.; Rivas, A.; Jiménez, M.D.P.; Menéndez, J.M. Observability in traffic networks. Plate scanning added by counting information. Transp. 2012, 39, 1301–1333. [Google Scholar] [CrossRef]
- Sanchez-Cambronero, S.; Jiménez, M.D.P.; Rivas, A.; Gallego, I. Plate scanning tools to obtain travel times in traffic networks. J. Intell. Transp. Syst. 2017, 21, 390–408. [Google Scholar] [CrossRef]
- Castillo, E.F.; Gallego, I.; Menendez, J.M.; Rivas, A. Optimal Use of Plate-Scanning Resources for Route Flow Estimation in Traffic Networks. IEEE Trans. Intell. Transp. Syst. 2010, 11, 380–391. [Google Scholar] [CrossRef]
- Sánchez-Cambronero, S.; Castillo, E.; Menéndez, J.M.; Jiménez, M.D.P. Dealing with Error Recovery in Traffic Flow Prediction Using Bayesian Networks Based on License Plate Scanning Data. J. Transp. Eng. 2011, 137, 615–629. [Google Scholar] [CrossRef]
- U.S. Department of Transportation. Available online: https://www.itsbenefits.its.dot.gov/ITS/benecost.nsf/ID/20746487B947B3358525797C006528CF (accessed on 31 July 2020).
- Bernaś, M.; Płaczek, B.; Korski, W.; Loska, P.; Smyła, J.; Szymała, P. A Survey and Comparison of Low-Cost Sensing Technologies for Road Traffic Monitoring. Sensors 2018, 18, 3243. [Google Scholar] [CrossRef] [Green Version]
- Carrabs, F.; Cerulli, R.; D’Ambrosio, C.; Gentili, M.; Raiconi, A. Maximizing lifetime in wireless sensor networks with multiple sensor families. Comput. Oper. Res. 2015, 60, 121–137. [Google Scholar] [CrossRef]
- Du, R.; Gkatzikis, L.; Fischione, C.; Xiao, M. On Maximizing Sensor Network Lifetime by Energy Balancing. IEEE Trans. Control. Netw. Syst. 2017, 5, 1206–1218. [Google Scholar] [CrossRef] [Green Version]
- Github. Available online: https://github.com/openalpr/openalpr (accessed on 31 July 2020).
- OpenALPR. Available online: https://www.openalpr.com/benchmarks.html (accessed on 31 July 2020).
- Plate Recognizer. Available online: https://platerecognizer.com/ (accessed on 31 July 2020).
- SD-Toolkit. Available online: https://www.sd-toolkit.com/products_sdtanpr_windows.php (accessed on 31 July 2020).
- Anyline. Available online: https://anyline.com/ (accessed on 31 July 2020).
- Eocortex. Available online: https://eocortex.com/products/video-management-software-vms/license-plate-recognition (accessed on 31 July 2020).
- Izidio, D.; Ferreira, A.; Medeiros, H.; Barros, E. An embedded automatic license plate recognition system using deep learning. Des. Autom. Embed. Syst. 2020, 24, 23–43. [Google Scholar] [CrossRef]
- IntelliVision. Available online: https://www.intelli-vision.com/license-plate-recognition/ (accessed on 31 July 2020).
- Genetec. Available online: https://www.genetec.com/solutions/all-products/autovu (accessed on 31 July 2020).
- Handscombe, J.; Yu, H. Low-Cost and Data Anonymised City Traffic Flow Data Collection to Support Intelligent Traffic System. Sensors 2019, 19, 347. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gentili, M.; Mirchandani, P. Locating sensors on traffic networks: Models, challenges and research opportunities. Transport. Res. Part C 2012, 24, 227–255. [Google Scholar] [CrossRef]
- Hadavi, M.; Shafabi, Y. Vehicle identification sensors location problem for large networks. J. Intell. Transp. Syst. 2019, 23, 389–402. [Google Scholar] [CrossRef]
- Google. Available online: https://cloud.google.com/appengine (accessed on 31 July 2020).
- Yen, J. Finding the k-Shortest Loopless Paths in a Network. Manag. Sci. 1971, 17, 661–786. [Google Scholar] [CrossRef]
- Owais, M.; Moussa, G.; Hussain, K. Sensor location model for O/D estimation: Multi-criteria meta-heuristics approach. Oper. Res. Perspect. 2019, 6, 1–12. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zero | ZeroW | A | B | Pi2B | Pi3B | |
|---|---|---|---|---|---|---|
| Idle | 100 | 120 | 140 | 360 | 230 | 230 |
| Capture | 140 | 200 | 260 | 420 | 290 | 290 |
| Networking | - | 230 | 320 | 480 | 350 | 350 |
| Node | Zone | Node | Zone | Node | Zone | Node | Zone | Node | Zone | Node | Zone |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 5 | 14 | 5 | 27 | 12 | 40 | 12 | 53 | 14 | 66 | 3 |
| 2 | 7 | 15 | 5 | 28 | 12 | 41 | 12 | 54 | 13 | 67 | 2 |
| 3 | 9 | 16 | 5 | 29 | 9 | 42 | 12 | 55 | 13 | 68 | 8 |
| 4 | 9 | 17 | 5 | 30 | 5 | 43 | 12 | 56 | 10 | 69 | 11 |
| 5 | 9 | 18 | 5 | 31 | 5 | 44 | 12 | 57 | 10 | 70 | 11 |
| 6 | 9 | 19 | 5 | 32 | 7 | 45 | 12 | 58 | 6 | 71 | 11 |
| 7 | 9 | 20 | 12 | 33 | 7 | 46 | 12 | 59 | 6 | 72 | 11 |
| 8 | 9 | 21 | 12 | 34 | 9 | 47 | 12 | 60 | 6 | 73 | 10 |
| 9 | 9 | 22 | 12 | 35 | 9 | 48 | 12 | 61 | 6 | 74 | 12 |
| 10 | 7 | 23 | 12 | 36 | 9 | 49 | 9 | 62 | 6 | 75 | 10 |
| 11 | 5 | 24 | 12 | 37 | 9 | 50 | 12 | 63 | 4 | ||
| 12 | 5 | 25 | 12 | 38 | 12 | 51 | 1 | 64 | 3 | ||
| 13 | 5 | 26 | 12 | 39 | 12 | 52 | 15 | 65 | 3 |
| Zone | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | Total |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | - | 269 | 0 | 31 | 21 | 115 | 17 | 0 | 68 | 0 | 10 | 23 | 60 | 217 | 137 | 968 |
| 2 | 125 | - | 0 | 83 | 13 | 97 | 0 | 0 | 0 | 25 | 0 | 45 | 23 | 36 | 8 | 455 |
| 3 | 0 | 0 | - | 170 | 0 | 64 | 0 | 17 | 0 | 35 | 0 | 0 | 0 | 28 | 0 | 314 |
| 4 | 124 | 160 | 0 | - | 156 | 83 | 118 | 0 | 0 | 0 | 46 | 0 | 166 | 224 | 0 | 1077 |
| 5 | 70 | 89 | 0 | 0 | - | 0 | 0 | 0 | 0 | 0 | 0 | 118 | 0 | 40 | 5 | 322 |
| 6 | 43 | 118 | 0 | 70 | 20 | - | 46 | 32 | 0 | 0 | 2 | 0 | 0 | 48 | 28 | 407 |
| 7 | 50 | 12 | 0 | 0 | 0 | 0 | - | 0 | 0 | 0 | 0 | 9 | 0 | 17 | 2 | 90 |
| 8 | 3 | 4 | 0 | 0 | 0 | 31 | 0 | - | 0 | 47 | 12 | 34 | 25 | 16 | 0 | 172 |
| 9 | 15 | 26 | 48 | 62 | 0 | 55 | 0 | 0 | - | 105 | 39 | 73 | 64 | 13 | 22 | 522 |
| 10 | 30 | 12 | 0 | 55 | 0 | 37 | 0 | 95 | 375 | - | 0 | 0 | 57 | 21 | 0 | 682 |
| 11 | 8 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | - | 26 | 0 | 37 | 3 | 82 |
| 12 | 245 | 29 | 0 | 0 | 0 | 154 | 0 | 44 | 0 | 0 | 0 | - | 0 | 0 | 28 | 500 |
| 13 | 105 | 39 | 0 | 181 | 0 | 106 | 0 | 0 | 0 | 0 | 0 | 0 | - | 63 | 0 | 494 |
| 14 | 0 | 83 | 0 | 271 | 98 | 461 | 75 | 37 | 26 | 83 | 50 | 0 | 0 | - | 0 | 1184 |
| 15 | 80 | 25 | 0 | 0 | 123 | 144 | 31 | 0 | 52 | 10 | 21 | 0 | 0 | 0 | - | 486 |
| Total | 898 | 874 | 48 | 923 | 431 | 1347 | 287 | 225 | 521 | 305 | 180 | 328 | 395 | 760 | 233 | 7755 |
| Model | Scanned Link Set | |
|---|---|---|
| A1 | 1 2 3 5 10 27 31 42 43 47 48 50 51 56 58 60 85 89 100 110 137 150 151 152 153 154 155 156 158 163 | 0.2010 |
| B1 | 1 3 4 10 20 31 38 43 50 54 63 64 77 84 85 90 94 137 150 151 152 153 154 155 156 157 159 161 162 163 | 0.1976 |
| A2 | 1 2 4 5 10 38 42 43 47 48 50 51 56 58 77 85 89 97 100 110 137 151 152 153 154 155 156 158 162 173 | 0.1149 |
| B2 | 1 3 4 8 10 31 38 43 50 63 81 84 85 90 91 92 100 110 137 150 151 152 153 155 156 157 159 160 162 163 | 0.1106 |
| Number of Routes in | Number of Routes in | Added Routes Compatibles with | Number of Routes in | |
|---|---|---|---|---|
| 10 | 2943 | 2896 | 23 | 2919 |
| 15 | 2943 | 2816 | 30 | 2846 |
| 20 | 2943 | 2398 | 31 | 2429 |
| 25 | 2943 | 2175 | 41 | 2216 |
| 30 | 2943 | 2090 | 47 | 2137 |
| Scanned Link Set | ||
|---|---|---|
| 10 | 1 3 4 8 10 31 38 43 50 63 81 84 85 90 91 92 100 110 137 150 151 152 153 155 156 157 159 160 162 163 | 0.1106 |
| 15 | 34 6 7 19 25 31 38 43 50 60 72 84 85 90 91 92 137 150 151 152 153 154 155 156 157 160 161 162 163 | 0.1117 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Álvarez-Bazo, F.; Sánchez-Cambronero, S.; Vallejo, D.; Glez-Morcillo, C.; Rivas, A.; Gallego, I. A Low-Cost Automatic Vehicle Identification Sensor for Traffic Networks Analysis. Sensors 2020, 20, 5589. https://doi.org/10.3390/s20195589
Álvarez-Bazo F, Sánchez-Cambronero S, Vallejo D, Glez-Morcillo C, Rivas A, Gallego I. A Low-Cost Automatic Vehicle Identification Sensor for Traffic Networks Analysis. Sensors. 2020; 20(19):5589. https://doi.org/10.3390/s20195589
Chicago/Turabian StyleÁlvarez-Bazo, Fernando, Santos Sánchez-Cambronero, David Vallejo, Carlos Glez-Morcillo, Ana Rivas, and Inmaculada Gallego. 2020. "A Low-Cost Automatic Vehicle Identification Sensor for Traffic Networks Analysis" Sensors 20, no. 19: 5589. https://doi.org/10.3390/s20195589
APA StyleÁlvarez-Bazo, F., Sánchez-Cambronero, S., Vallejo, D., Glez-Morcillo, C., Rivas, A., & Gallego, I. (2020). A Low-Cost Automatic Vehicle Identification Sensor for Traffic Networks Analysis. Sensors, 20(19), 5589. https://doi.org/10.3390/s20195589