Automatic Classification of Squat Posture Using Inertial Sensors: Deep Learning Approach

Abstract
:1. Introduction
2. Materials and Methods
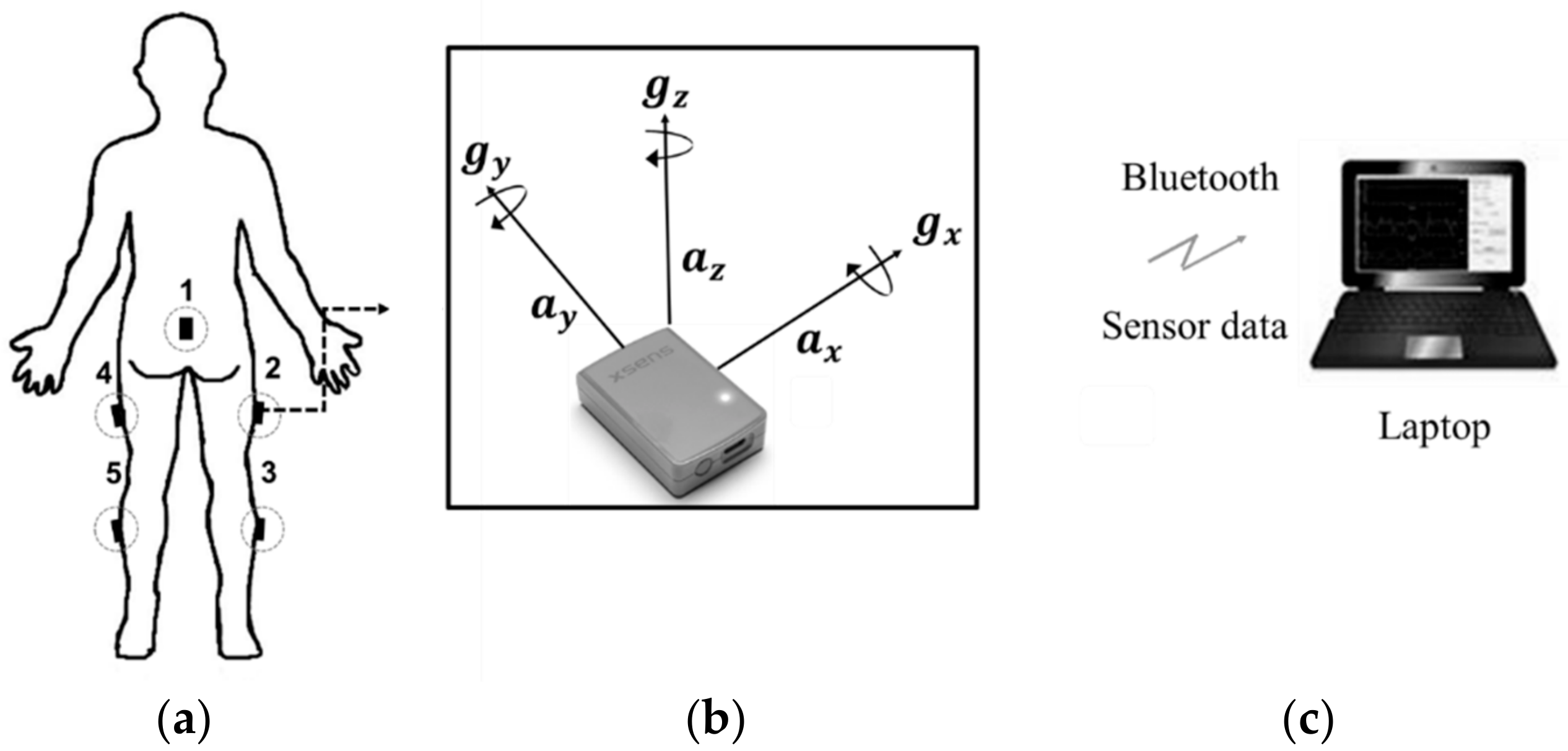
2.1. Measurement Settings and Experimental Protocol
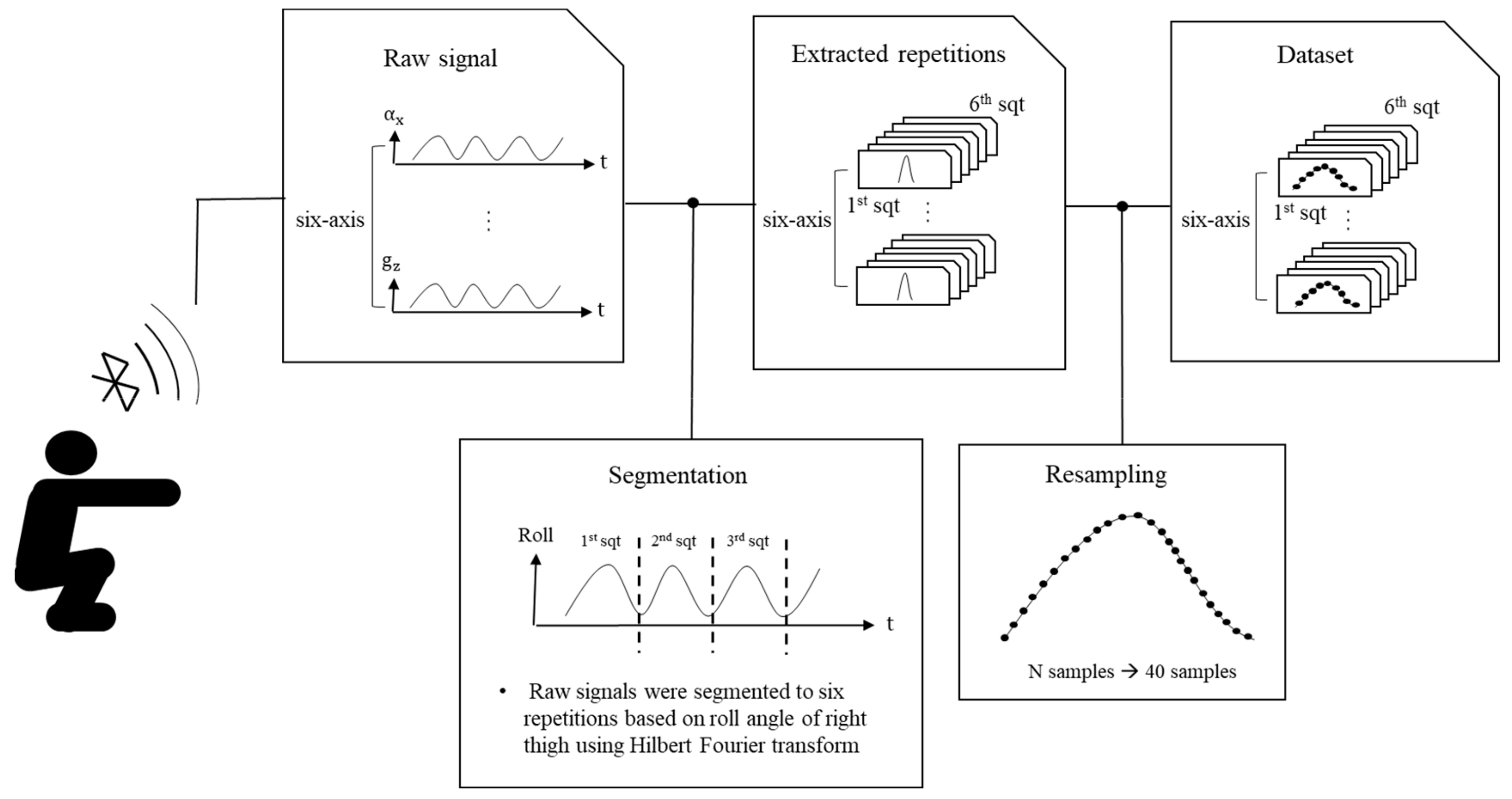
2.2. Preprocessing
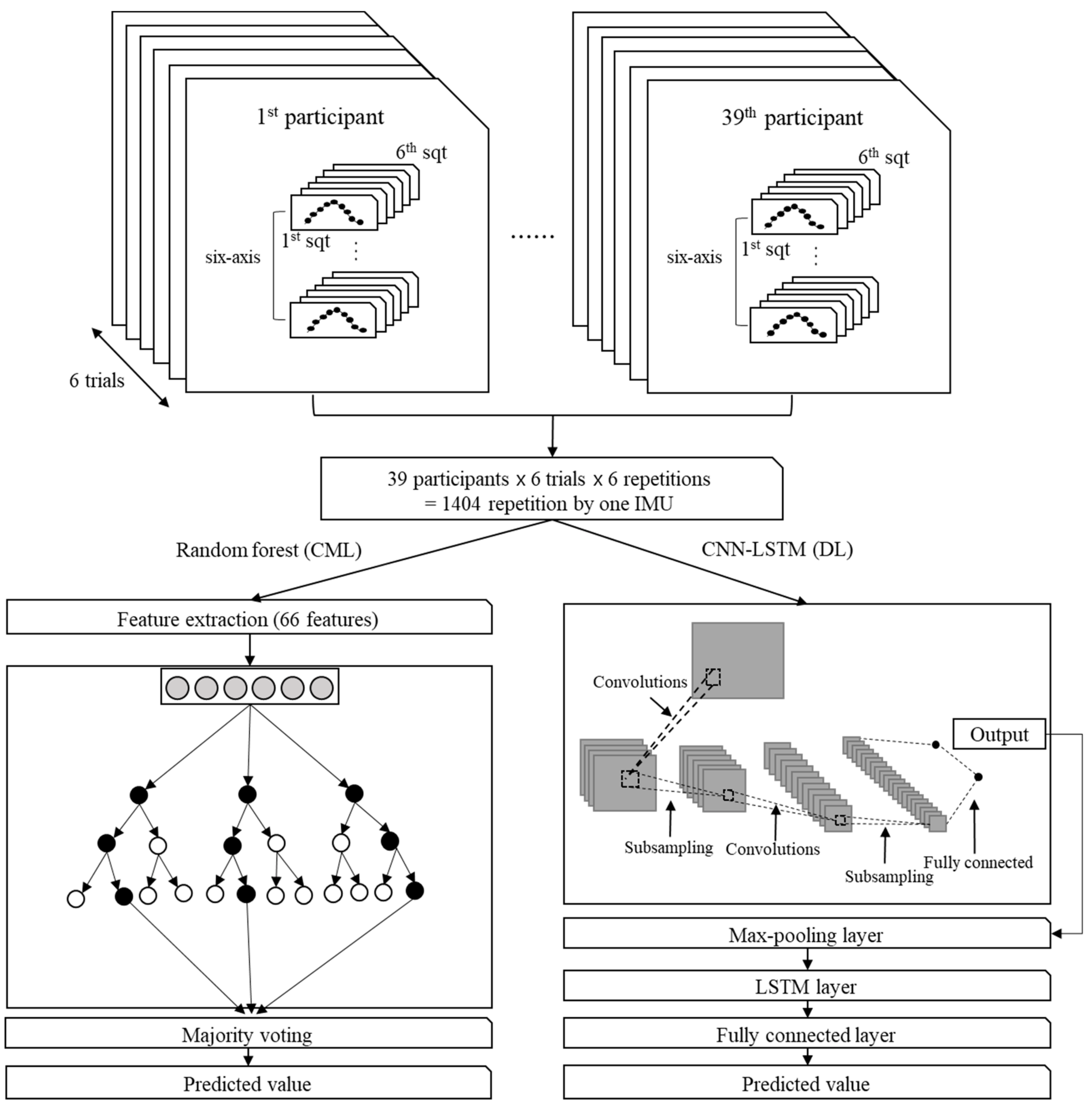
2.3. Classification Algorithms
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bassett, S. Measuring Patient Adherence to Physiotherapy. J. Nov. Physiother. 2012, 2, 60–66. [Google Scholar] [CrossRef] [Green Version]
- McCurdy, K.W.; Langford, G.A.; Doscher, M.W.; Wiley, L.P.; Mallard, K.G. The Effects of Short-Term Unilateral and Bilateral Lower-Body Resistance Training on Measures of Strength and Power. J. Strength Cond. Res. 2005, 19, 9–15. [Google Scholar] [PubMed] [Green Version]
- Kritz, M.; Cronin, J.; Hume, P. The Bodyweight Squat: A Movement Screen for the Squat Pattern. Strength Cond. J. 2009, 31, 76–85. [Google Scholar] [CrossRef] [Green Version]
- Friedrich, M.; Cermak, T.; Maderbacher, P. The Effect of Brochure Use versus Therapist Teaching on Patients Performing Therapeutic Exercise and on Changes in Impairment Status. Phys. Ther. 1996, 76, 1082–1088. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, S.-H.; Kwon, O.-Y.; Park, K.-N.; Jeon, I.-C.; Weon, J.-H. Lower Extremity Strength and the Range of Motion in Relation to Squat Depth. J. Hum. Kinet. 2015, 45, 59–69. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baccouche, M.; Mamalet, F.; Wolf, C.; Garcia, C.; Baskurt, A. Sequential deep learning for human action recognition. In International Workshop on Human Behavior Understanding; Springer: New York, NY, USA, 2011; pp. 29–39. [Google Scholar]
- Yang, J.; Nguyen, M.N.; San, P.P.; Li, X.L.; Krishnaswamy, S. Deep convolutional neural networks on multichannel time series for human activity recognition. In Proceedings of the Twenty-Fourth International Joint Conference on Artificial Intelligence, Buenos Aires, Argentina, 25–31 July 2015. [Google Scholar]
- Mehrizi, R.; Peng, X.; Tang, Z.; Xu, X.; Metaxas, D.; Li, K. Toward marker-free 3d pose estimation in lifting: A deep multi-view solution. In Proceedings of the 2018 13th IEEE International Conference on Automatic Face & Gesture Recognition (FG 2018), Xi’an, China, 15–19 May 2018; pp. 485–491. [Google Scholar]
- Newell, A.; Yang, K.; Deng, J. Stacked hourglass networks for human pose estimation. In European Conference on Computer Vision; Springer: New York, NY, USA, 2016; pp. 483–499. [Google Scholar]
- Mehrizi, R.; Peng, X.; Metaxas, D.N.; Xu, X.; Zhang, S.; Li, K. Predicting 3-D Lower Back Joint Load in Lifting: A Deep Pose Estimation Approach. IEEE Trans. Hum. Mach. Syst. 2019, 49, 85–94. [Google Scholar] [CrossRef]
- Whelan, D.F.; O’Reilly, M.A.; Ward, T.E.; Delahunt, E.; Caulfield, B. Technology in Rehabilitation: Evaluating the Single Leg Squat Exercise with Wearable Inertial Measurement Units. Methods Inf. Med. 2017, 56, 88–94. [Google Scholar] [PubMed] [Green Version]
- O’Reilly, M.; Whelan, D.; Chanialidis, C.; Friel, N.; Delahunt, E.; Ward, T.; Caulfield, B. Evaluating squat performance with a single inertial measurement unit. In Proceedings of the 2015 IEEE 12th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Cambridge, MA, USA, 9 June 2015; pp. 1–6. [Google Scholar]
- Biswas, D.; Cranny, A.; Gupta, N.; Maharatna, K.; Achner, J.; Klemke, J.; Jöbges, M.; Ortmann, S. Recognizing Upper Limb Movements with Wrist Worn Inertial Sensors Using K-Means Clustering Classification. Hum. Mov. Sci. 2015, 40, 59–76. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- Ordóñez, F.; Roggen, D. Deep Convolutional and Lstm Recurrent Neural Networks for Multimodal Wearable Activity Recognition. Sensors 2016, 16, 115. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hammerla, N.Y.; Halloran, S.; Plötz, T. Deep, Convolutional, and Recurrent Models for Human Activity Recognition Using Wearables. arXiv 2016, arXiv:1604.08880. [Google Scholar]
- Hu, B.; Dixon, P.C.; Jacobs, J.V.; Dennerlein, J.T.; Schiffman, J.M. Machine Learning Algorithms Based on Signals from a Single Wearable Inertial Sensor Can Detect Surface-and Age-Related Differences in Walking. J. Biomech. 2018, 71, 37–42. [Google Scholar] [CrossRef] [PubMed]
- Work Out Smarter: Best Gym Trackers and Wearables to Look Out For. Available online: https://www.wareable.com/sport/the-best-gym-fitness-tracker-band-weights-wearables (accessed on 19 December 2019).
- Paulich, M.; Schepers, M.; Rudigkeit, N.; Bellusci, G. Xsens MTw Awinda: Miniature Wireless Inertial-Magnetic Motion Tracker for Highly Accurate 3D Kinematic Applications; Xsens: Enschede, The Netherlands, 2018. [Google Scholar]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M. Tensorflow: Large-Scale Machine Learning on Heterogeneous Distributed Systems. arXiv 2016, arXiv:1603.04467. [Google Scholar]
- Wang, J.; Chen, Y.; Hao, S.; Peng, X.; Hu, L. Deep Learning for Sensor-Based Activity Recognition: A Survey. Pattern Recognit. Lett. 2019, 119, 3–11. [Google Scholar] [CrossRef] [Green Version]
- Zeng, M.; Nguyen, L.T.; Yu, B.; Mengshoel, O.J.; Zhu, J.; Wu, P.; Zhang, J. Convolutional neural networks for human activity recognition using mobile sensors. In Proceedings of the 6th International Conference on Mobile Computing, Applications and Services, Austin, TX, USA, 6–7 November 2014; pp. 197–205. [Google Scholar]
- Bonnet, V.; Mazza, C.; Fraisse, P.; Cappozzo, A. A Least-Squares Identification Algorithm for Estimating Squat Exercise Mechanics Using a Single Inertial Measurement Unit. J. Biomech. 2012, 45, 1472–1477. [Google Scholar] [CrossRef] [PubMed]
- O’Reilly, M.; Duffin, J.; Ward, T.; Caulfield, B. Mobile App to Streamline the Development of Wearable Sensor-Based Exercise Biofeedback Systems: System Development and Evaluation. JMIR Rehabil. Assist. Technol. 2017, 4, e9. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
| Squat | Description | Figure | Squat | Description | Figure |
|---|---|---|---|---|---|
| Acceptable (ACC) | Normal squat |  | Knee varus (KVR) | Both knees pointing outside during exercise |  |
| Anterior knee (AK) | Knees ahead of toes during exercise |  | Half squat (HS) | Insufficient squatting depth |  |
| Knee valgus (KVG) | Both knees pointing inside during exercise |  | Bent over (BO) | Excessive flexing of hip and torso |  |
| Number of IMUs | Placement of IMUs | Random Forest (CML) | CNN–LSTM (DL) | ||||
|---|---|---|---|---|---|---|---|
| Accuracy | Sensitivity | Specificity | Accuracy | Sensitivity | Specificity | ||
| 5 IMUs | Right thigh, right calf, left thigh, left calf, and lumbar region | 75.4% | 78.6% | 90.3% | 91.7% | 90.9% | 94.6% |
| 2 IMUs | Right thigh and lumbar region | 63.2% | 64.6% | 87.6% | 83.9% | 85.6% | 90.4% |
| Right thigh and right calf | 73.9% | 76.8% | 89.5% | 88.7% | 90.5% | 95.7% | |
| Right calf and lumbar region | 66.0% | 70.1% | 86.1% | 86.2% | 87.1% | 87.6% | |
| 1 IMUs | Right thigh | 58.7% | 66.7% | 88.9% | 80.9% | 80.0% | 93.1% |
| Right calf | 57.6% | 62.7% | 82.2% | 76.1% | 78.9% | 92.8% | |
| Lumbar region | 34.6% | 38.6% | 68.1% | 46.1% | 50.3% | 79.0% | |
| (a) Right thigh with DL | (b) Lumbar region with DL | ||||||||||||||
| Predicted Values | Predicted Values | ||||||||||||||
| ACC | AK | KVG | KVR | HS | BO | ACC | AK | KVG | KVR | HS | BO | ||||
| Actual Values | ACC | 114 | 29 | 43 | 18 | 0 | 30 | Actual Values | ACC | 80 | 21 | 59 | 49 | 13 | 12 |
| AK | 43 | 92 | 14 | 22 | 20 | 43 | AK | 28 | 82 | 11 | 51 | 44 | 18 | ||
| KVG | 24 | 23 | 170 | 0 | 0 | 17 | KVG | 76 | 11 | 105 | 24 | 16 | 2 | ||
| KVR | 28 | 19 | 3 | 168 | 2 | 14 | KVR | 39 | 33 | 22 | 87 | 40 | 13 | ||
| HS | 0 | 13 | 0 | 4 | 188 | 29 | HS | 6 | 32 | 13 | 19 | 149 | 15 | ||
| BO | 34 | 46 | 26 | 4 | 34 | 90 | BO | 15 | 31 | 4 | 17 | 23 | 144 | ||
| (c) Right thigh with CML | (d) Lumbar region with CML | ||||||||||||||
| Predicted Values | Predicted Values | ||||||||||||||
| ACC | AK | KVG | KVR | HS | BO | ACC | AK | KVG | KVR | HS | BO | ||||
| Actual Values | ACC | 114 | 29 | 43 | 18 | 0 | 30 | Actual Values | ACC | 71 | 22 | 62 | 34 | 28 | 17 |
| AK | 43 | 92 | 14 | 22 | 20 | 43 | AK | 33 | 56 | 18 | 46 | 31 | 50 | ||
| KVG | 24 | 23 | 170 | 0 | 0 | 17 | KVG | 62 | 18 | 87 | 17 | 21 | 29 | ||
| KVR | 28 | 19 | 3 | 168 | 2 | 14 | KVR | 41 | 45 | 38 | 52 | 43 | 15 | ||
| HS | 0 | 13 | 0 | 4 | 188 | 29 | HS | 23 | 31 | 19 | 49 | 74 | 38 | ||
| BO | 34 | 46 | 26 | 4 | 34 | 90 | BO | 15 | 31 | 20 | 8 | 16 | 144 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Joo, H.; Lee, J.; Chee, Y. Automatic Classification of Squat Posture Using Inertial Sensors: Deep Learning Approach. Sensors 2020, 20, 361. https://doi.org/10.3390/s20020361
Lee J, Joo H, Lee J, Chee Y. Automatic Classification of Squat Posture Using Inertial Sensors: Deep Learning Approach. Sensors. 2020; 20(2):361. https://doi.org/10.3390/s20020361
Chicago/Turabian StyleLee, Jaehyun, Hyosung Joo, Junglyeon Lee, and Youngjoon Chee. 2020. "Automatic Classification of Squat Posture Using Inertial Sensors: Deep Learning Approach" Sensors 20, no. 2: 361. https://doi.org/10.3390/s20020361
APA StyleLee, J., Joo, H., Lee, J., & Chee, Y. (2020). Automatic Classification of Squat Posture Using Inertial Sensors: Deep Learning Approach. Sensors, 20(2), 361. https://doi.org/10.3390/s20020361