LPI Radar Waveform Recognition Based on Features from Multiple Images


Abstract
:1. Introduction
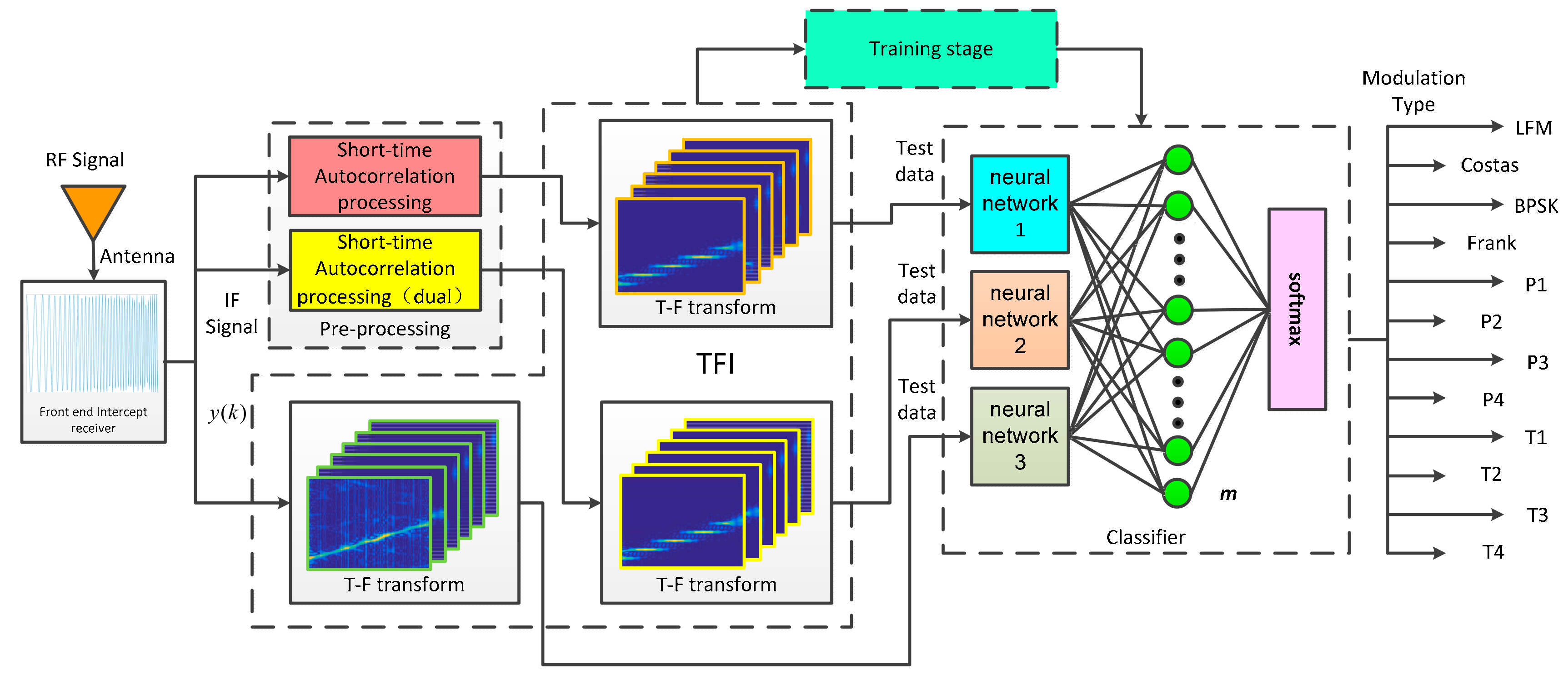
2. System Structure and Waveforms
2.1. Proposed LWRT
2.2. LPI Radar Waveform
3. Signal Pre-Processing
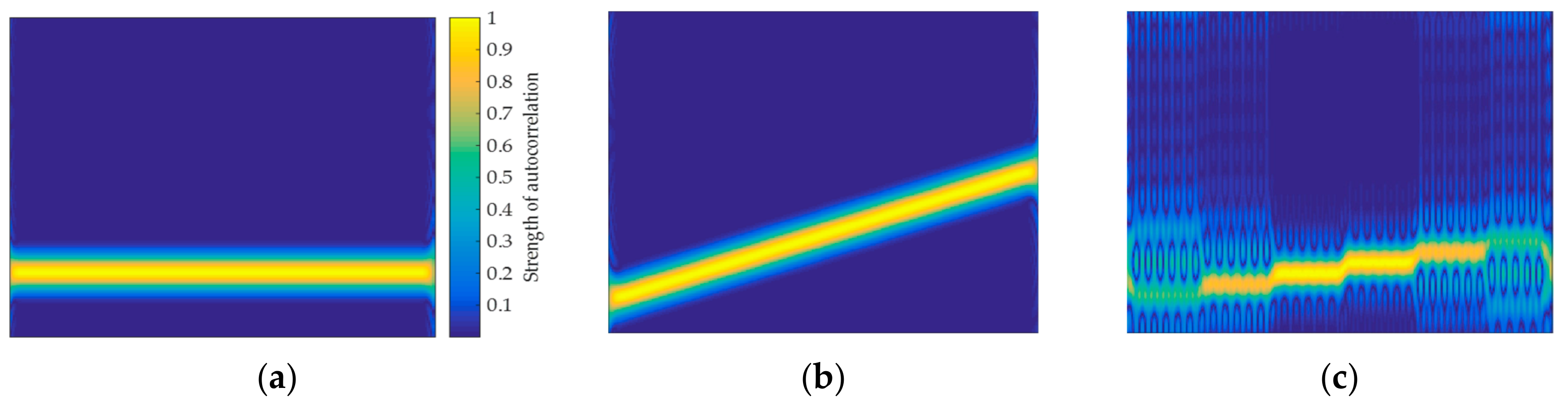
3.1. TFA Technique for CWD-TFI
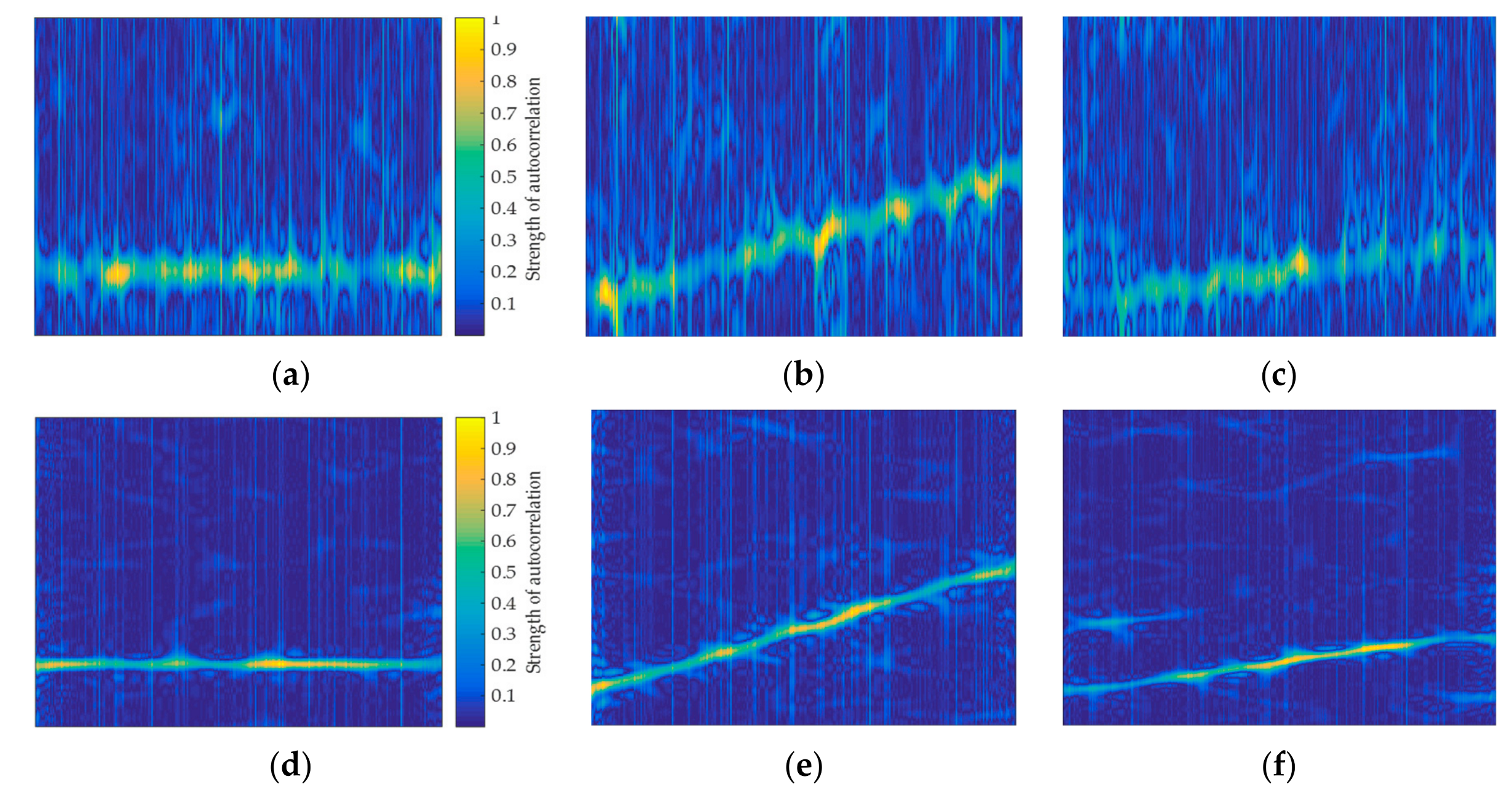
3.2. Signal Pre-Processing for Noise Reduction
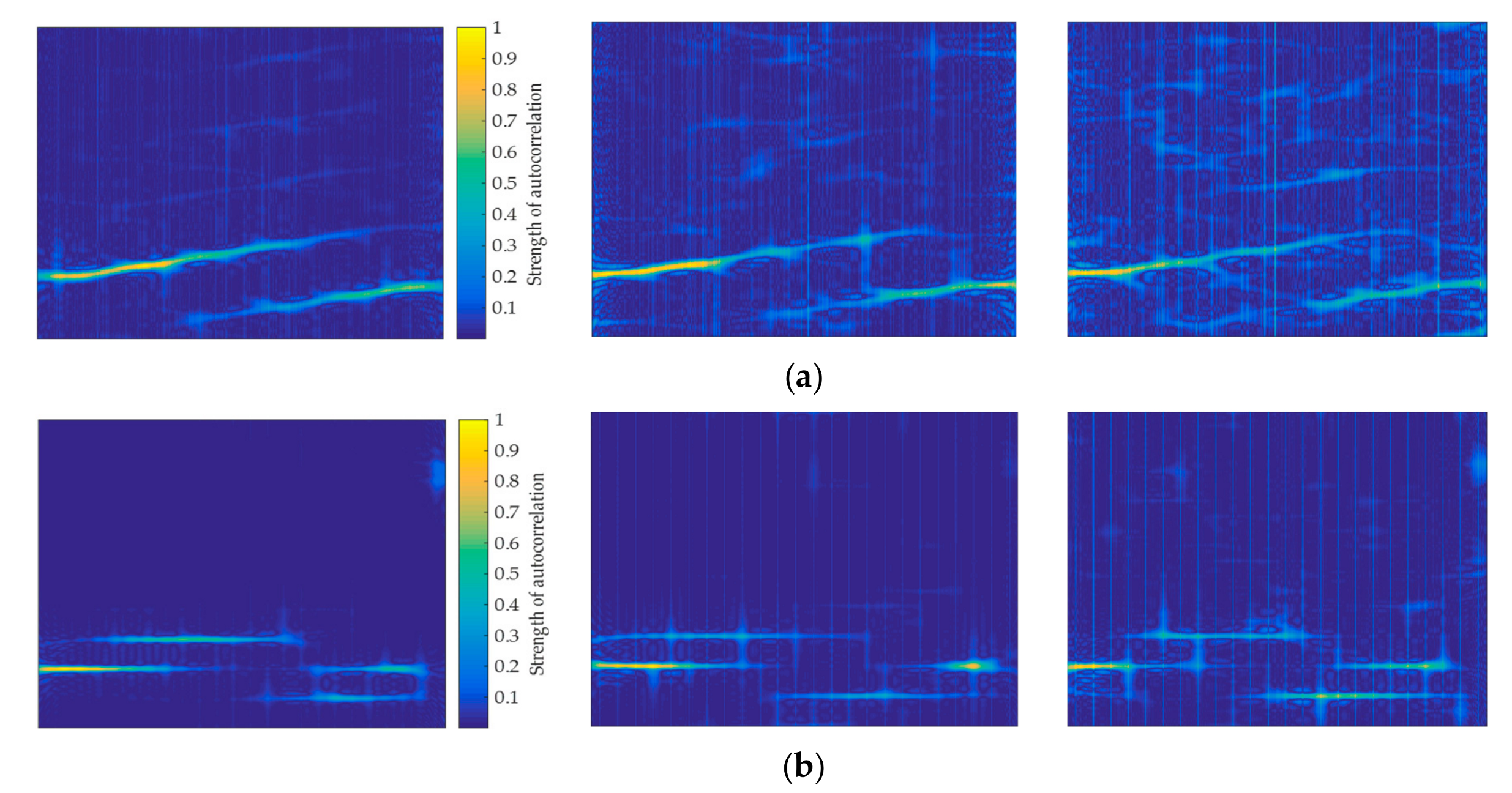
3.3. Proposed Noise Reduction Algorithm for LPI Signal
4. Design of the Proposed Hybrid Model
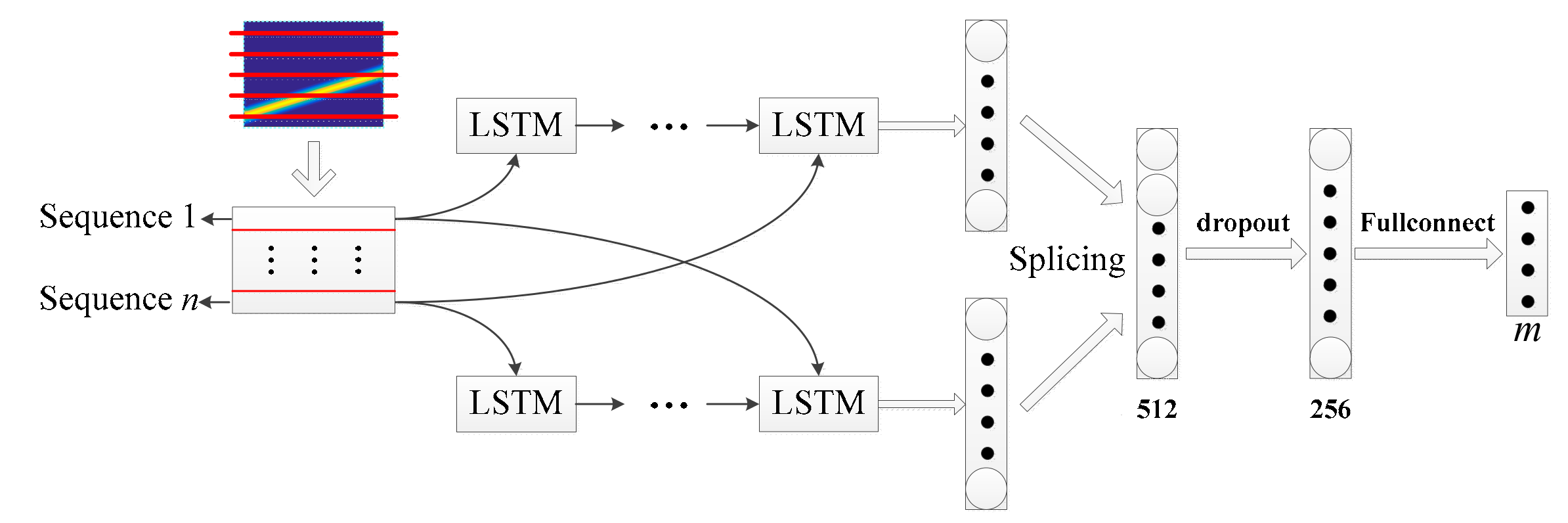
4.1. Design of Feature Extraction Structure
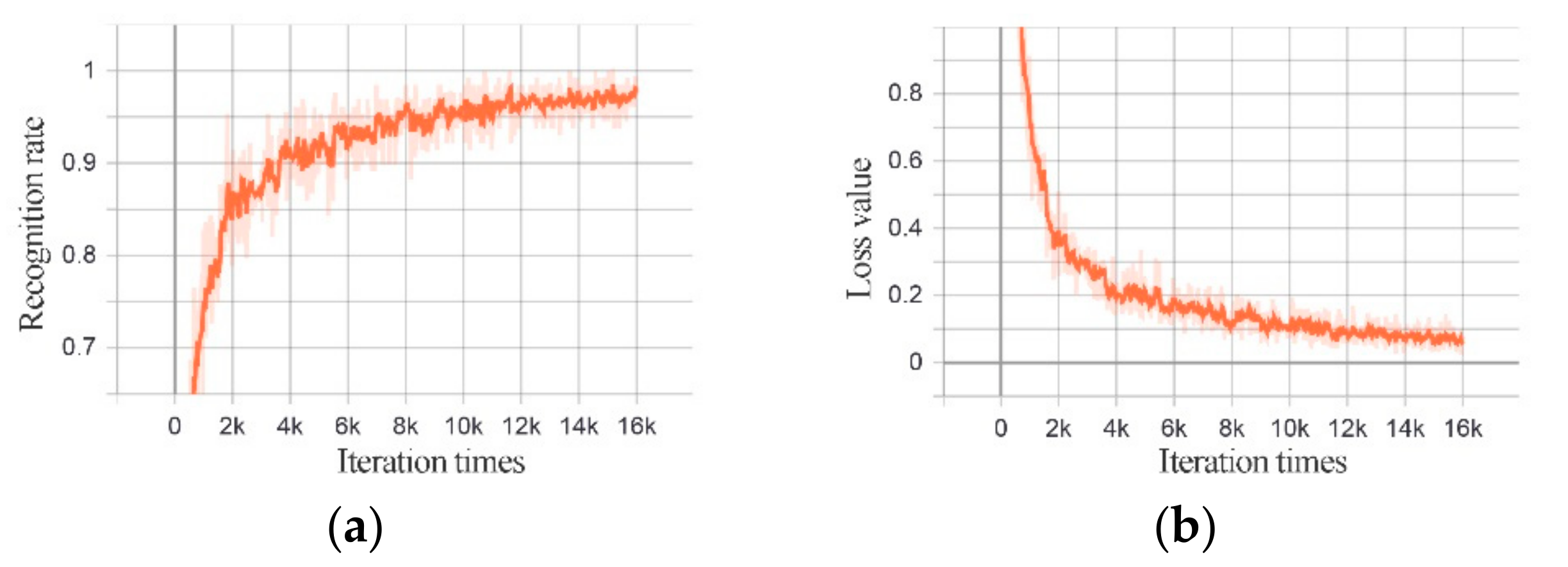
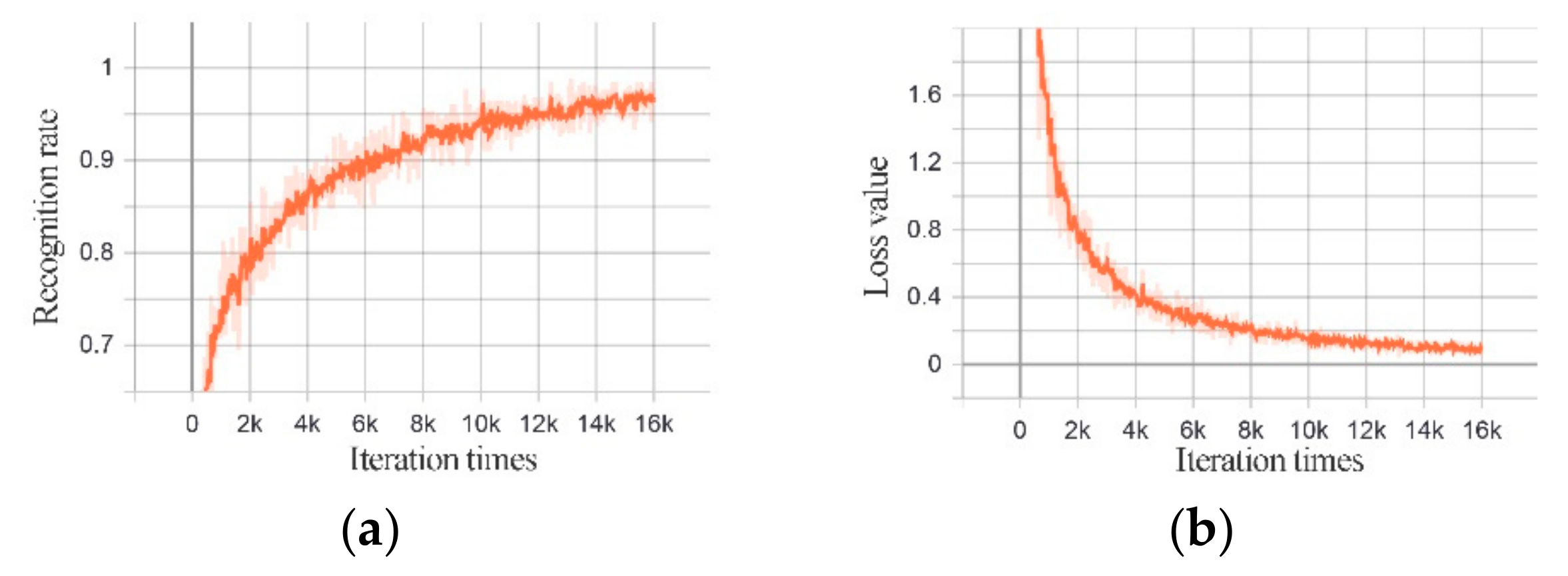
4.2. Network Parameter Adjustment
5. Performance Demonstration and Comparison to the Competitive Literature
5.1. The Simulation Condition
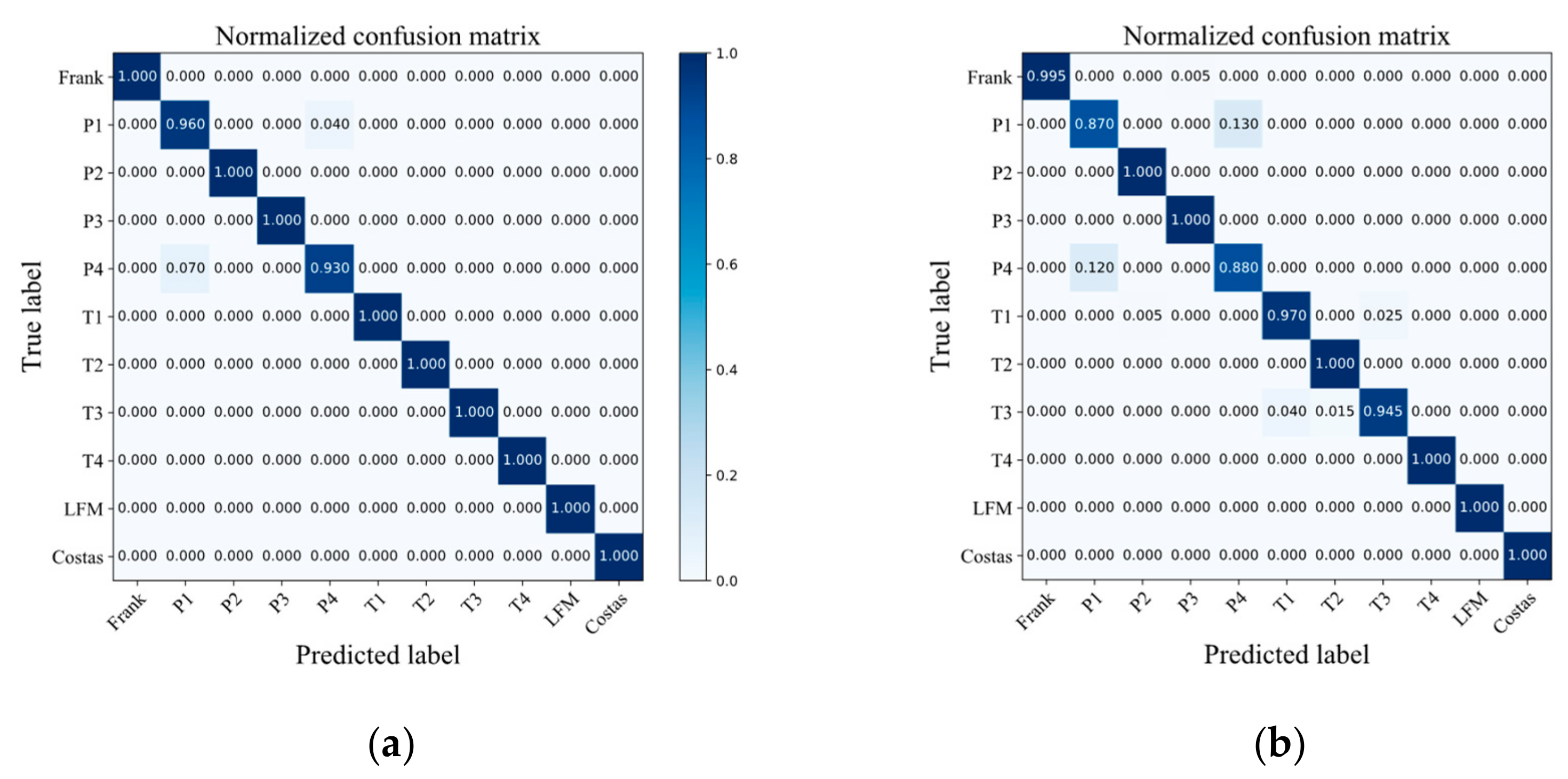
5.2. Classification Result of Test Set
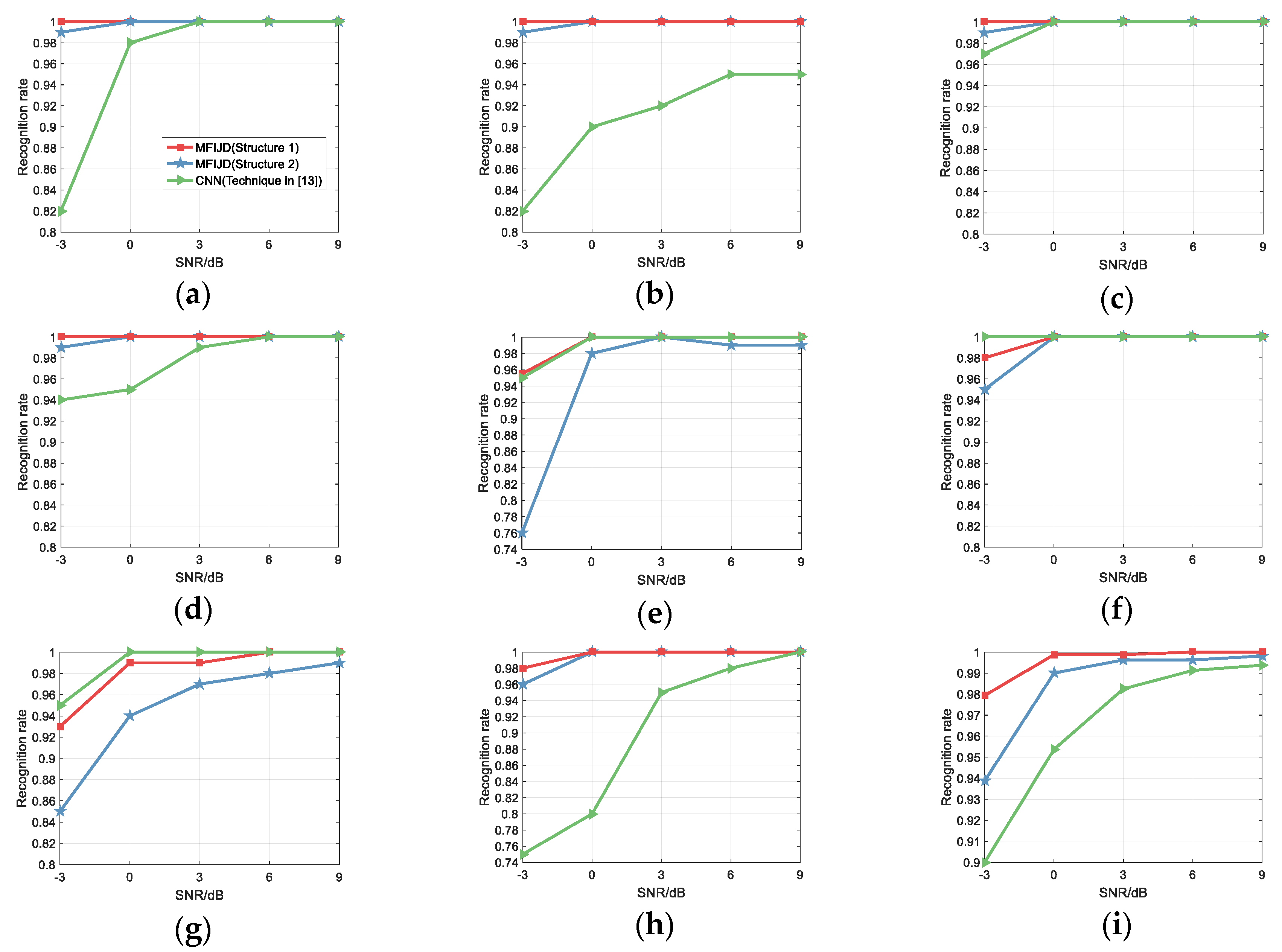
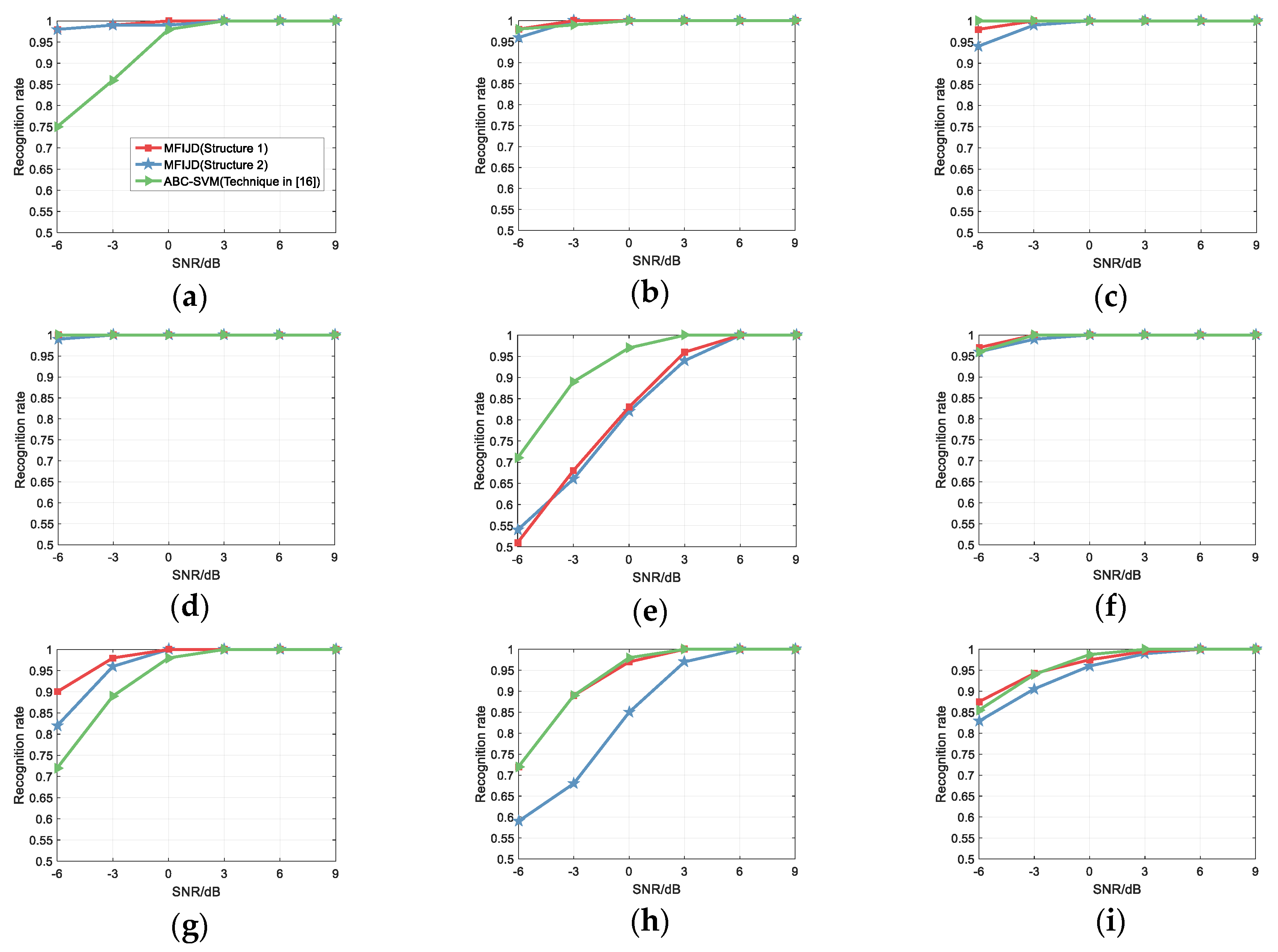
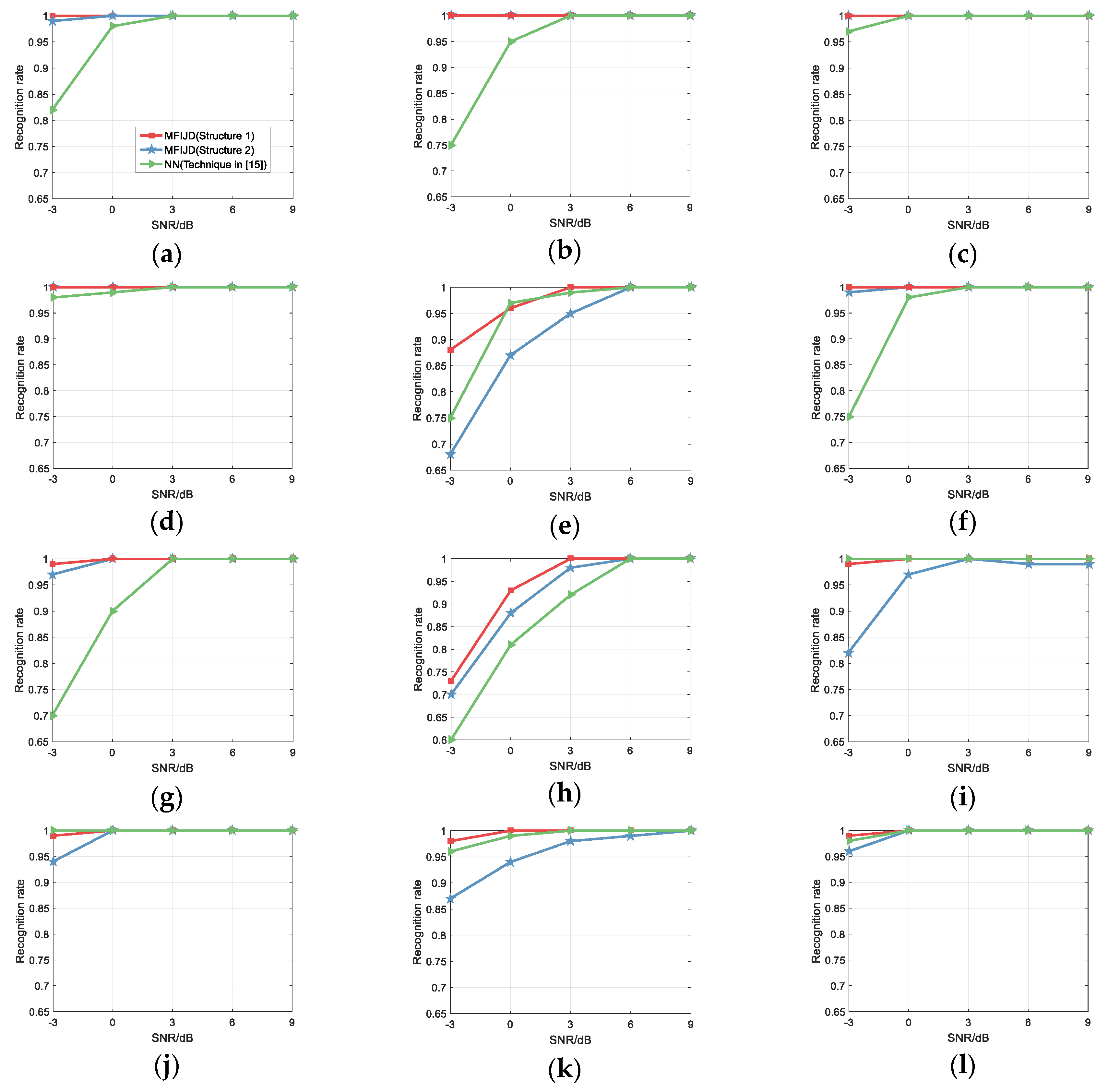
5.3. Comparison of Algorithm Performance
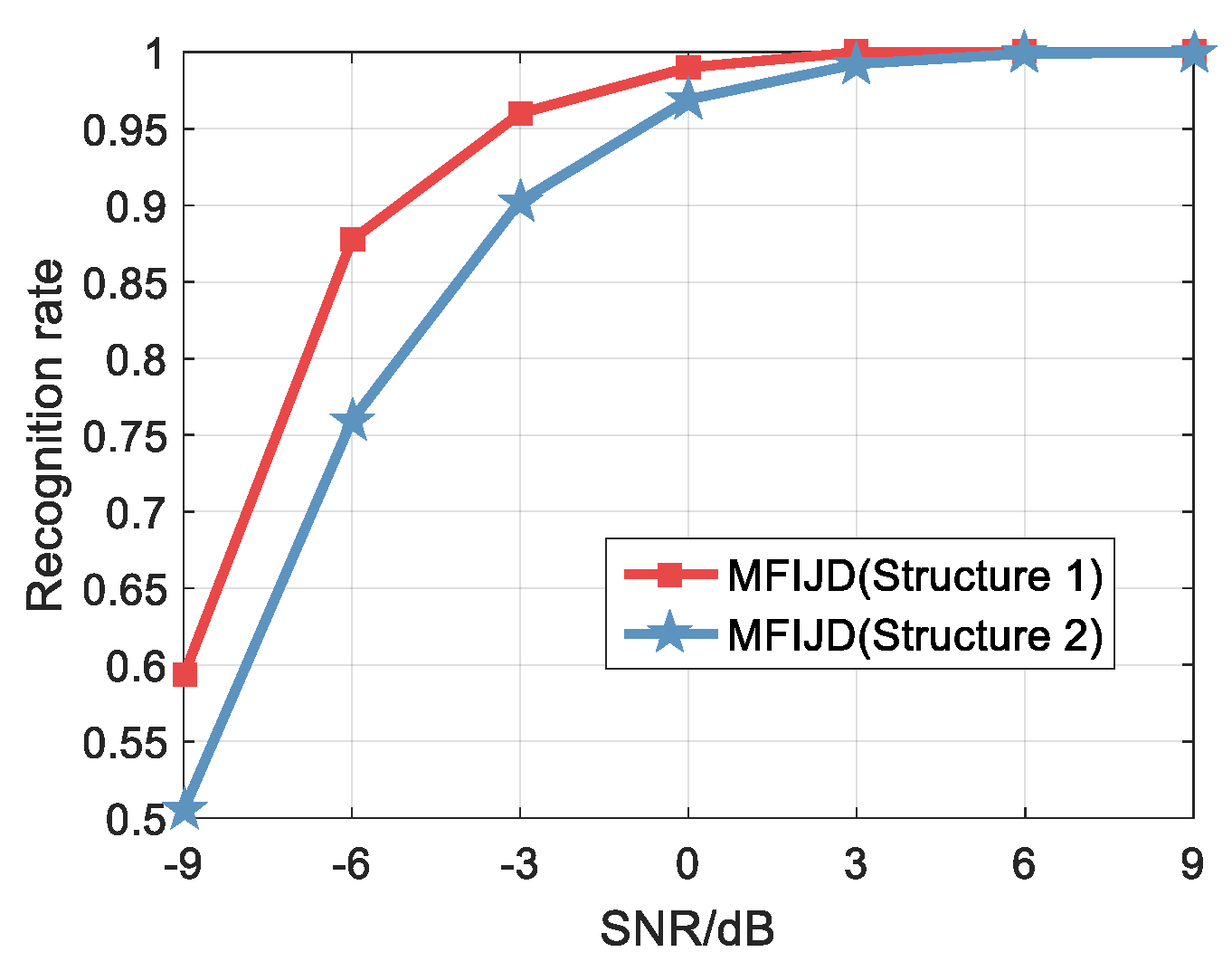
5.4. MFIJD Model Analysis
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Wiley, R.G. ELINT: The Interception and Analysis of Radar Signals; Artech House: Norwood, MA, USA, 2006. [Google Scholar]
- Lunden, J.; Koivunen, V. Automatic radar waveform recognition. IEEE J. Sel. Top. Signal Process. 2007, 1, 124–136. [Google Scholar] [CrossRef]
- Ma, J.; Huang, G.; Zuo, W.; Wu, X.; Gao, J. Robust radar waveform recognition algorithm based on random projections and sparse classification. IET Radar Sonar Navig. 2014, 8, 290–296. [Google Scholar] [CrossRef]
- Davy, J. Data Modeling and Simulation Applied to Radar Signal Recognition. Mol. Quantum Acoust. 2005, 26, 165–173. [Google Scholar]
- Zhou, Z.; Huang, G.; Gao, J.; Man, X. Radar emitter identification algorithm based on deep learning. J. Xidian Univ. 2017, 44, 85–90. [Google Scholar]
- Zhang, M.; Liu, L.; Diao, M. LPI Radar waveform recognition based on time-frequency distribution. Sensors 2016, 16, 1682. [Google Scholar] [CrossRef]
- Zhu, J.D.; Zhao, Y.J.; Tang, J. Automatic recognition of radar signals based on time-frequency image character. In Proceedings of the IET International Radar Conference, Xi’an, China, 14–16 April 2013; pp. 1–6. [Google Scholar]
- Wang, C.; Wang, J.; Zhang, X. Automatic radar waveform recognition based on time-frequency analysis and convolutional neural network. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Process (ICASSP), New Orlens, LA, USA, 5–9 March 2017; pp. 2437–2441. [Google Scholar]
- Zhou, Z.; Huang, G.; Chen, H. Automatic radar waveform recognition based on deep convolutional denoising auto-encoders. Circuits Syst. Signal Process. 2018, 37, 4034–4048. [Google Scholar] [CrossRef]
- Lopezrisueno, G.; Grajal, J.; Sanz-osorio, A. Digital channelized receiver based on time-frequency analysis for signal interception. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 879–898. [Google Scholar] [CrossRef]
- Chen, T.; Liu, L.; Huang, X. LPI Radar waveform recognition based on multi-branch MWC compressed sampling receiver. IEEE Access 2018, 6, 30342–30354. [Google Scholar] [CrossRef]
- Zilberman, E.R.; Pace, P.E. Autonomous time-frequency morphological feature extraction algorithm for LPI radar modulation classification. In Proceedings of the International Conference on Image Process, Atlanta, GA, USA, 8–11 October 2006; pp. 2321–2324. [Google Scholar]
- Zhang, M.; Diao, M.; Guo, L. Convolutional neural networks for automatic cognitive radio waveform recognition. IEEE Access 2017, 5, 11074–11082. [Google Scholar] [CrossRef]
- Kong, S.-H.; Kim, M.; Hoang, L.M.; Kim, E. Automatic LPI radar waveform recognition using CNN. IEEE Access 2018, 6, 4207–4219. [Google Scholar] [CrossRef]
- Zhang, M.; Diao, M.; Gao, L.; Liu, L. Neural networks for radar waveform recognition. Symmetry 2017, 9, 75. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Wang, S.; Zhao, Z. Radar waveform recognition based on time-frequency analysis and artificial Bee colony-support vector machine. Electronics 2018, 7, 59. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Proceedings of the Neural Information Processing Systems (NIPS), Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Li, J.; Meng, K.; Li, Y. Adaptive linear TFPF for seismic random noise attenuation. J. Pet. Explor. Prod. Technol. 2018, 8, 1443–1453. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Du, P.; Yang, J. Transferred deep learning based waveform recognition for cognitive passive radar. Signal Process. 2019, 155, 259–267. [Google Scholar] [CrossRef]
- Gao, L.; Zhang, X.; Gao, J. Fusion image based radar signal feature extraction and modulation recognition. IEEE Access 2019, 7, 13135–13148. [Google Scholar] [CrossRef]
- Qu, Z.Y.; Mao, X.J.; Deng., Z.A. Radar signal intra-pulse modulation recognition based on convolutional neural network. IEEE Access 2018, 6, 43874–43884. [Google Scholar] [CrossRef]
- Kishore, T.R.; Rao, K.D. Automatic Intra-pulse modulation classification of advanced LPI radar waveforms. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 901–914. [Google Scholar] [CrossRef]
- Le, B.; Liu, Z.; Gu, T. Weak LFM signal detection based on wavelet transform modulus maxima denoising and other techniques. Int. J. Wavelets Multiresolut. Inf. Process. 2010, 8, 313–326. [Google Scholar] [CrossRef]
- Kabir, M.A.; Shahnaz, C. Denoising of ECG signals based on noise reduction algorithms in EMD and wavelet domains. Biomed. Signal Process. Control 2012, 7, 481–489. [Google Scholar] [CrossRef]
- Huang, Z.; Ma, Z.Y.; Huang, G.M. Radar waveform recognition based on multiple autocorrelation images. IEEE Access 2019, 7, 98653–98667. [Google Scholar] [CrossRef]
- Zeng, D.; Zeng, X.; Lu, G. Automatic modulation classification of radar signals using the generalised time-frequency representation of Zhao, Atlas and Marks. IET Radar Sonar Navig. 2011, 5, 507–516. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modulation Type | ||
|---|---|---|
| LFM | constant | |
| Costas | fj | constant |
| Frank | constant | |
| P1 | constant | |
| P2 | constant | |
| P3 | constant | |
| P4 | constant | |
| T1 | constant | |
| T2 | constant | |
| T3 | constant | |
| T4 | constant |
| Serial Number | Number of Neurons in the Hidden Layer | Time Consumption (min) | Recognition Rate (%) |
|---|---|---|---|
| 1 | 64 | 2 | 50.8 |
| 2 | 128 | 4 | 55.9 |
| 3 | 256 | 7 | 64.1 |
| 4 | 512 | 12 | 64.1 |
| Radar Waveforms | Parameters | Value of Range |
|---|---|---|
| LFM | ||
| Costas | ||
| Frank, P1 | ||
| P2 | ||
| P3, P4 | ||
| T1, T2 | ||
| T3, T4 |
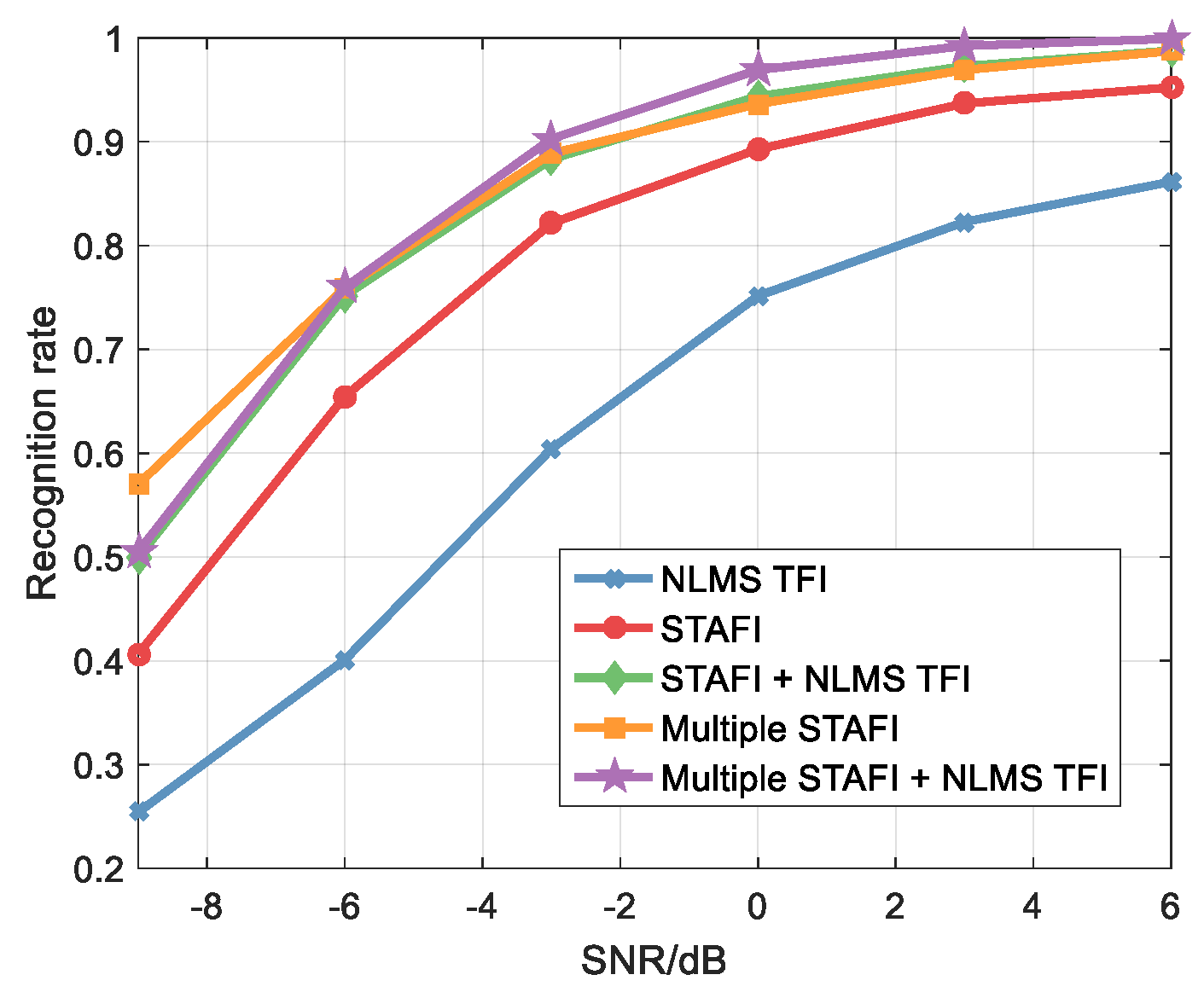
| Type of Feature Image | Feature Extraction Model |
|---|---|
| NLMS TFI | BiLSTM |
| Short-time autocorrelation feature image | CNN |
| Short-time autocorrelation feature image + NLMS TFI | CNN+BiLSTM |
| Multiple short-time autocorrelation feature image | CNN+CNN |
| Multiple short-time autocorrelation feature image + NLMS TFI | CNN+CNN+BiLSTM |
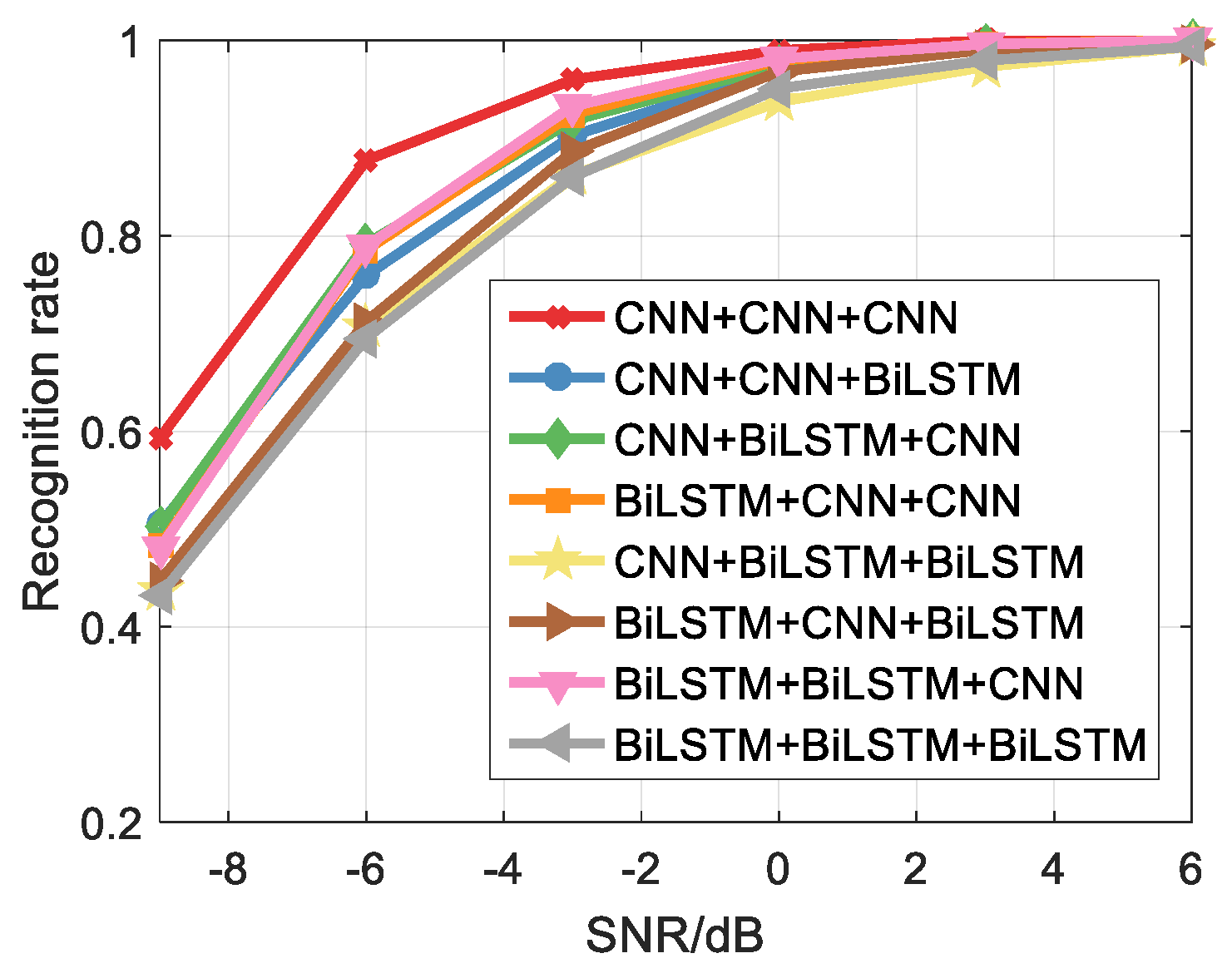
| Combination of Feature Extraction Models | −9 dB | −6 dB | −3 dB | 0 dB | 3 dB | 6 dB | 9 dB |
|---|---|---|---|---|---|---|---|
| BiLSTM+BiLSTM+BiLSTM | 0.432 | 0.695 | 0.860 | 0.951 | 0.980 | 0.994 | 0.995 |
| BiLSTM+BiLSTM+CNN | 0.480 | 0.789 | 0.933 | 0.981 | 0.996 | 1 | 1 |
| BiLSTM+CNN+BiLSTM | 0.446 | 0.712 | 0.886 | 0.968 | 0.990 | 0.997 | 0.999 |
| CNN+BiLSTM+BiLSTM | 0.437 | 0.708 | 0.862 | 0.937 | 0.973 | 0.994 | 0.995 |
| CNN+CNN+BiLSTM | 0.505 | 0.760 | 0.902 | 0.969 | 0.992 | 0.999 | 0.999 |
| BiLSTM+CNN+CNN | 0.482 | 0.785 | 0.925 | 0.980 | 0.997 | 1 | 1 |
| CNN+BiLSTM+CNN | 0.502 | 0.792 | 0.918 | 0.974 | 0.996 | 1 | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Huang, Z.; Lin, A.; Huang, G. LPI Radar Waveform Recognition Based on Features from Multiple Images. Sensors 2020, 20, 526. https://doi.org/10.3390/s20020526
Ma Z, Huang Z, Lin A, Huang G. LPI Radar Waveform Recognition Based on Features from Multiple Images. Sensors. 2020; 20(2):526. https://doi.org/10.3390/s20020526
Chicago/Turabian StyleMa, Zhiyuan, Zhi Huang, Anni Lin, and Guangming Huang. 2020. "LPI Radar Waveform Recognition Based on Features from Multiple Images" Sensors 20, no. 2: 526. https://doi.org/10.3390/s20020526
APA StyleMa, Z., Huang, Z., Lin, A., & Huang, G. (2020). LPI Radar Waveform Recognition Based on Features from Multiple Images. Sensors, 20(2), 526. https://doi.org/10.3390/s20020526