Design, Validation and Comparison of Path Following Controllers for Autonomous Vehicles


Abstract
:1. Introduction
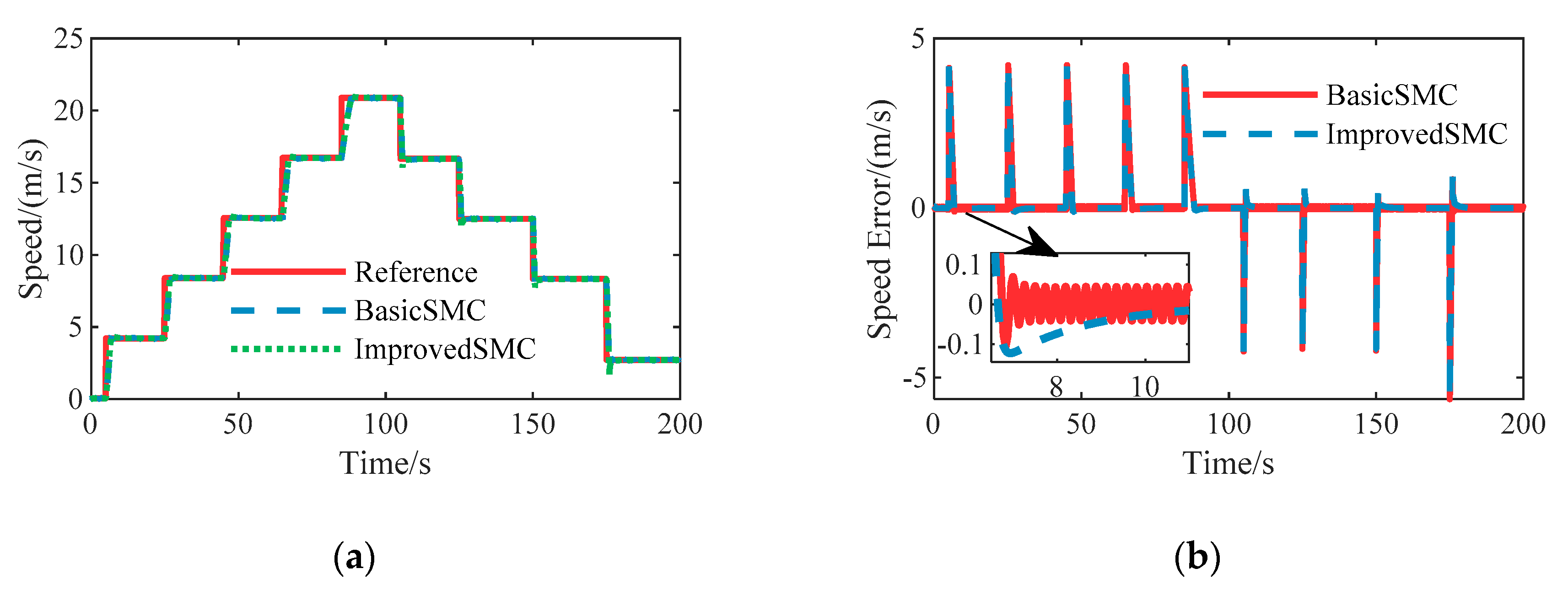
- A longitudinal speed controller based on sliding mode control with nonlinear conditional integrator is proposed to realize the longitudinal motion control of autonomous vehicle during the path following process. It is well known that sliding mode controllers suffer from chattering. To solve this problem, we adopt the saturation function to replace the sign function, meanwhile, a nonlinear integral action is introduced to achieve zero steady-state error and improve the transient performance, which can also avoid integral divergence. Stability analysis is given to prove that the equilibrium point is globally asymptotically stable.
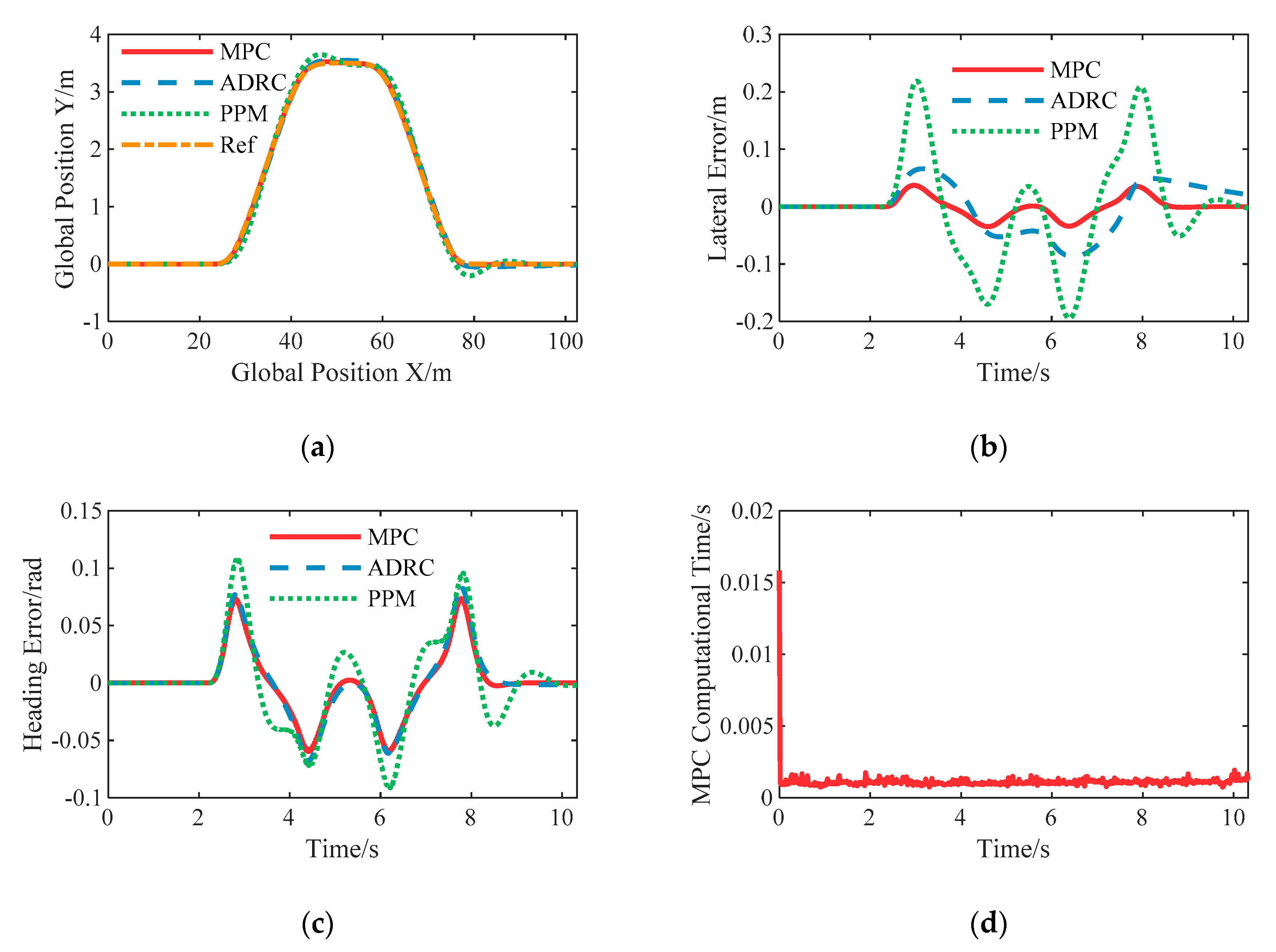
- The lateral controllers based on LPV-MPC (Linear Parameter Varying Model Predictive Control), ADRC (Active Disturbance Rejection Control), and PPM (Pure Pursuit Method)are designed, respectively. First, because the MPC can exploit available preview information and handles constraints, an MPC lateral control-based strategy that considers the soft constraints of the sideslip angle of the steer wheel is formulated based on the error dynamics model, which adopts the CVXGEN [16] solver to improve computational efficiency. Second, the nonlinear ADRC is applied to develop the lateral controller due to the simple control structure and good robustness, which is also largely model independent. Finally, the pure pursuit method using the geometric model is provided as a benchmark.
- Multiple simulations in different scenarios are conducted to validate the effectiveness and capability of the proposed longitudinal speed controller and lateral path following controllers. A comparison of the three mentioned lateral controllers is made to highlight the advantages and drawbacks of each approach in path following. Finally, the possible development direction in the future is given.
2. Related Work
3. Systems Description
3.1. Longitudinal Vehicle Dynamics
3.2. Lateral Vehicle Dynamics
4. Longitudinal Speed Controller Design
4.1. Feedforward of Speed Controller
4.1.1. Feedforward from Reference Acceleration
4.1.2. Drag Compensation
4.2. Feedback of Speed Controller
4.3. Stability Analysis
4.3.1. Inside the Boundary Layer ()
4.3.2. Outside the Boundary Layer ()
5. Lateral Path Following Controllers Design
5.1. LPV-MPC Controller
5.1.1. Vehicle Model Discretization and Augmentation
5.1.2. MPC Problem Formulation
5.1.3. Quadratic Program Solver
5.2. ADRC Controller
5.2.1. ADRC Theoretical Basis
5.2.2. Application of ADRC
5.3. Pure Pursuit Controller
6. Results and Discussion
6.1. Case A: Speed Tracking
6.2. Case B: Skid Pad Test
6.3. Case C: Double Lane Change Test
6.3.1. Constant 5 m/s with the Given Path
6.3.2. Constant 10 m/s with the Given Path
6.3.3. Constant 15 m/s with the Given Path
6.4. Comprehensive Evaluation
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Paden, B.; Cap, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef] [Green Version]
- De Winter, A.; Baldi, S. Real-Life Implementation of a GPS-Based Path-Following System for an Autonomous Vehicle. Sensors 2018, 18, 3940. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ni, J.; Hu, J. Dynamics control of autonomous vehicle at driving limits and experiment on an autonomous formula racing car. Mech. Syst. Signal Process 2017, 90, 154–174. [Google Scholar] [CrossRef]
- Talvala, K.L.R.; Kritayakirana, K.; Gerdes, J.C. Pushing the limits: From lane keeping to autonomous racing. Annu. Rev. Control 2011, 35, 137–148. [Google Scholar] [CrossRef]
- Li, S.E.; Qin, X.; Li, K.; Wang, J.; Xie, B. Robustness Analysis and Controller Synthesis of Homogeneous Vehicular Platoons with Bounded Parameter Uncertainty. IEEE/ASME Trans. Mech. 2017, 22, 1014–1025. [Google Scholar] [CrossRef]
- Buehler, M.; Iagnemma, K.; Singh, S. The DARPA Urban Challenge; Springer: Berlin, Germany, 2009. [Google Scholar]
- Xu, L.; Wang, Y.; Sun, H.; Xin, J.; Zheng, N. Integrated Longitudinal and Lateral Control for Kuafu-II Autonomous Vehicle. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2032–2041. [Google Scholar] [CrossRef]
- Self-Driving Cars from Tesla, Google, and Others Are Still Not Here-Vox. Available online: https://www.vox.com/future-perfect/2020/2/14/21063487/self-driving-cars-autonomous-vehicles-waymo-cruise-uber (accessed on 9 August 2020).
- Snider, J.M. Automatic Steering Methods for Autonomous Automobile Path Tracking; Carnegie Mellon University Pittsburgh PA Robotics Institute: Pittsburgh, PA, USA, 2009; CMURI-TR-09-08. [Google Scholar]
- Ackermann, J.; Guldner, J.; Sienel, W.; Steinhauser, R.; Utkin, V.I. Linear and nonlinear controller design for robust automatic steering. IEEE Trans. Control Syst. Technol. 1995, 3, 132–143. [Google Scholar] [CrossRef]
- Ji, X.; He, X.; Lv, C.; Liu, Y.; Wu, J. Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits. Control Eng. Pract. 2018, 76, 41–53. [Google Scholar] [CrossRef]
- Guo, H.; Shen, C.; Zhang, H.; Chen, H.; Jia, R. Simultaneous Trajectory Planning and Tracking Using an MPC Method for Cyber-Physical Systems: A Case Study of Obstacle Avoidance for an Intelligent Vehicle. IEEE Trans. Ind. Inform. 2018, 14, 4273–4283. [Google Scholar] [CrossRef]
- Liu, J.; Jayakumar, P.; Stein, J.L.; Ersal, T. A nonlinear model predictive control formulation for obstacle avoidance in high-speed autonomous ground vehicles in unstructured environments. Veh. Syst. Dyn. 2018, 56, 853–882. [Google Scholar] [CrossRef]
- Gao, Y.; Gray, A.; Tseng, H.E.; Borrelli, F. A tube-based robust nonlinear predictive control approach to semiautonomous ground vehicles. Veh. Syst. Dyn. 2014, 52, 802–823. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Mattingley, J.; Boyd, S. CVXGEN: A code generator for embedded convex optimization. Optim. Eng. 2012, 13, 1–27. [Google Scholar] [CrossRef]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The robot that won the DARPA Grand Challenge. J. Field Robot 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Xu, S.; Peng, H.; Song, Z.; Chen, K.; Tang, Y. Design and Test of Speed Tracking Control for the Self-Driving Lincoln MKZ Platform. IEEE Trans. Intell. Veh. 2020, 5, 324–334. [Google Scholar] [CrossRef]
- Gerdes, J.C.; Hedrick, J.K. Vehicle speed and spacing control via coordinated throttle and brake actuation. Control Eng. Pract. 1997, 5, 1607–1614. [Google Scholar] [CrossRef]
- Kim, H.; Kim, D.; Shu, I.; Yi, K. Time-Varying Parameter Adaptive Vehicle Speed Control. IEEE Trans. Veh. Technol. 2016, 65, 581–588. [Google Scholar] [CrossRef]
- Zhu, M.; Chen, H.; Xiong, G. A model predictive speed tracking control approach for autonomous ground vehicles. Mech. Syst. Signal Process 2017, 87, 138–152. [Google Scholar] [CrossRef]
- Marino, R.; Scalzi, S.; Netto, M. Nested PID steering control for lane keeping in autonomous vehicles. Control Eng. Pract. 2011, 19, 1459–1467. [Google Scholar] [CrossRef]
- Xu, S.; Peng, H. Design, Analysis, and Experiments of Preview Path Tracking Control for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 48–58. [Google Scholar] [CrossRef]
- Tagne, G.; Talj, R.; Charara, A. Design and Comparison of Robust Nonlinear Controllers for the Lateral Dynamics of Intelligent Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 796–809. [Google Scholar] [CrossRef]
- Falcone, P.; Borrelli, F.; Asgari, J.; Tseng, H.E.; Hrovat, D. Predictive Active Steering Control for Autonomous Vehicle Systems. IEEE Trans. Control Syst. Technol. 2007, 15, 566–580. [Google Scholar] [CrossRef]
- Falcone, P.; Tseng, H.E.; Borrelli, F.; Asgari, J.; Hrovat, D. MPC-based yaw and lateral stabilization via active front steering and braking. Veh. Syst. Dyn. 2008, 46 (Suppl. 1), 611–628. [Google Scholar] [CrossRef]
- Brown, M.; Funke, J.; Erlien, S.; Gerdes, J.C. Safe driving envelopes for path tracking in autonomous vehicles. Control Eng. Pract. 2017, 61, 307–316. [Google Scholar] [CrossRef]
- Funke, J.; Brown, M.; Erlien, S.M.; Gerdes, J.C. Collision Avoidance and Stabilization for Autonomous Vehicles in Emergency Scenarios. IEEE Trans. Control Syst. Technol. 2017, 25, 1204–1216. [Google Scholar] [CrossRef]
- Brown, M.; Gerdes, J.C. Coordinating Tire Forces to Avoid Obstacles Using Nonlinear Model Predictive Control. IEEE Trans. Intell. Veh. 2020, 5, 21–31. [Google Scholar] [CrossRef]
- Liu, J.; Jayakumar, P.; Stein, J.L.; Ersal, T. A study on model fidelity for model predictive control-based obstacle avoidance in high-speed autonomous ground vehicles. Veh. Syst. Dyn. 2016, 54, 1629–1650. [Google Scholar] [CrossRef]
- Hu, C.; Jing, H.; Wang, R.; Yan, F.; Chadli, M. Robust H∞ output-feedback control for path following of autonomous ground vehicles. Mech. Syst. Signal Process 2016, 70–71, 414–427. [Google Scholar] [CrossRef]
- Chu, Z.; Sun, Y.; Wu, C.; Sepehri, N. Active disturbance rejection control applied to automated steering for lane keeping in autonomous vehicles. Control Eng. Pract. 2018, 74, 13–21. [Google Scholar] [CrossRef]
- Khalil, H. Nonlinear System, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Symbol | Value | Unit |
|---|---|---|---|
| Vehicle mass | 1381 | kg | |
| Distance from COG to the front axle | 1.117 | m | |
| Distance from COG to the rear axle | 1.188 | m | |
| Yaw moment of inertia of the vehicle | 1833.8 | kg/m2 | |
| Cornering stiffness of the front wheel | 30,087 | N/rad | |
| Cornering stiffness of the rear wheel | 31,888 | N/rad | |
| Spin inertia of the wheel | 0.4 | kg | |
| Rolling radius of the wheel | 0.291 | m |
| Test No. | Desired Speed | Controller Design | Maximum Lateral Error | RMSE 1 of Lateral Error | Maximum Heading Error | RMSE of Heading Error |
|---|---|---|---|---|---|---|
| 1 | 5 m/s | MPC | 0.0061 | 0.0024 | 0.0776 | 0.0302 |
| 2 | 5 m/s | ADRC | 0.1127 | 0.0520 | 0.0941 | 0.0355 |
| 3 | 5 m/s | PPM | 0.1107 | 0.0403 | 0.0966 | 0.0345 |
| 4 | 10 m/s | MPC | 0.0372 | 0.0164 | 0.0735 | 0.0275 |
| 5 | 10 m/s | ADRC | 0.0872 | 0.0430 | 0.0833 | 0.0305 |
| 6 | 10 m/s | PPM | 0.2186 | 0.0921 | 0.1080 | 0.0398 |
| 7 | 15 m/s | MPC | 0.1312 | 0.0504 | 0.0806 | 0.0293 |
| 8 | 15 m/s | ADRC | 0.1033 | 0.0456 | 0.0796 | 0.0272 |
| 9 | 15 m/s | PPM | 0.7258 | 0.3218 | 0.1793 | 0.0819 |
| Controller Design | Advantages | Drawbacks |
|---|---|---|
| LPV-MPC |
|
|
| ADRC |
|
|
| PPM |
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Xiong, L.; Leng, B.; Zeng, D.; Zhuo, G. Design, Validation and Comparison of Path Following Controllers for Autonomous Vehicles. Sensors 2020, 20, 6052. https://doi.org/10.3390/s20216052
Yang X, Xiong L, Leng B, Zeng D, Zhuo G. Design, Validation and Comparison of Path Following Controllers for Autonomous Vehicles. Sensors. 2020; 20(21):6052. https://doi.org/10.3390/s20216052
Chicago/Turabian StyleYang, Xing, Lu Xiong, Bo Leng, Dequan Zeng, and Guirong Zhuo. 2020. "Design, Validation and Comparison of Path Following Controllers for Autonomous Vehicles" Sensors 20, no. 21: 6052. https://doi.org/10.3390/s20216052
APA StyleYang, X., Xiong, L., Leng, B., Zeng, D., & Zhuo, G. (2020). Design, Validation and Comparison of Path Following Controllers for Autonomous Vehicles. Sensors, 20(21), 6052. https://doi.org/10.3390/s20216052