A Full-Spectrum Registration Method for Zhuhai-1 Satellite Hyperspectral Imagery

 ,
,  ,
, 

Abstract
:1. Introduction
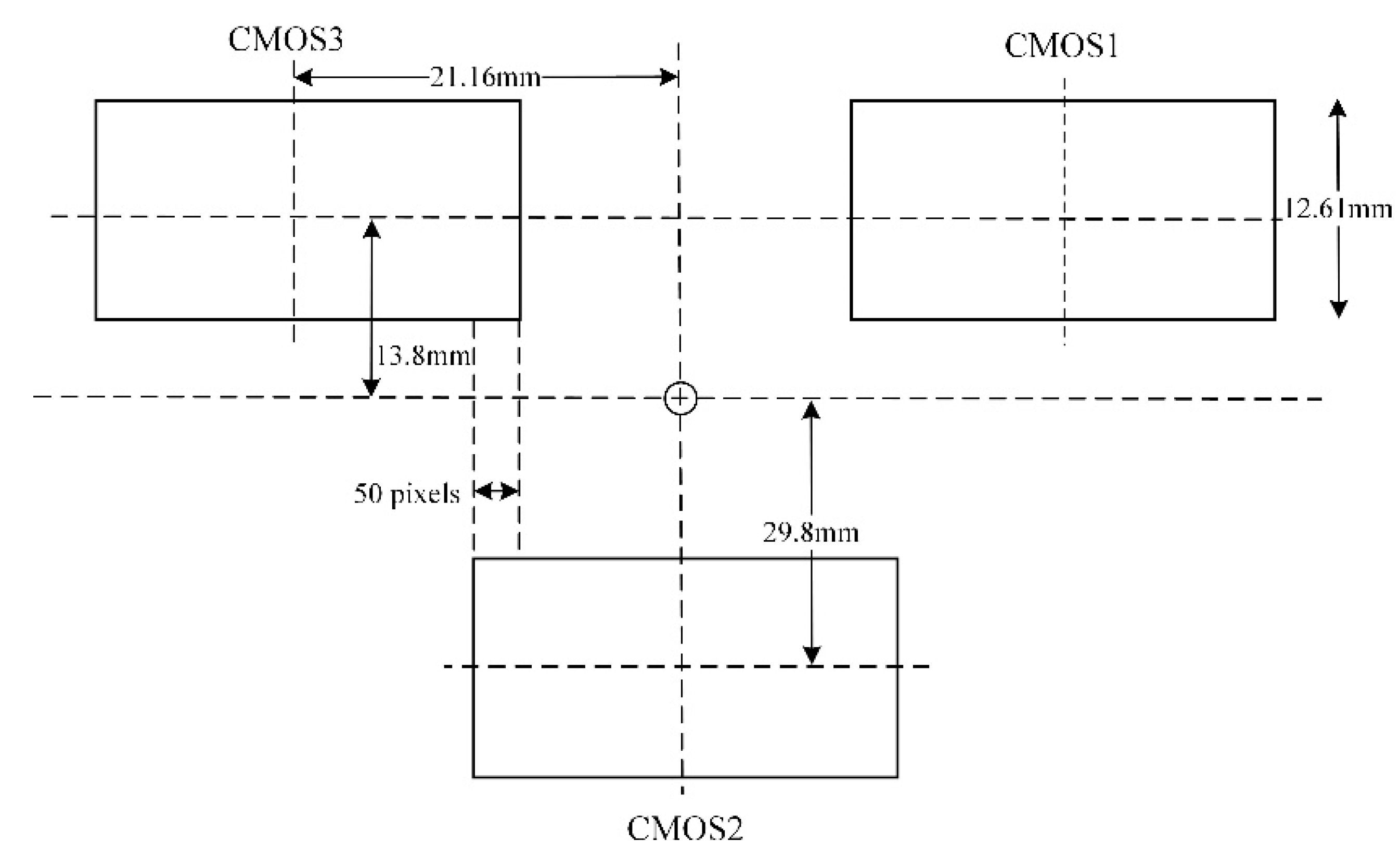
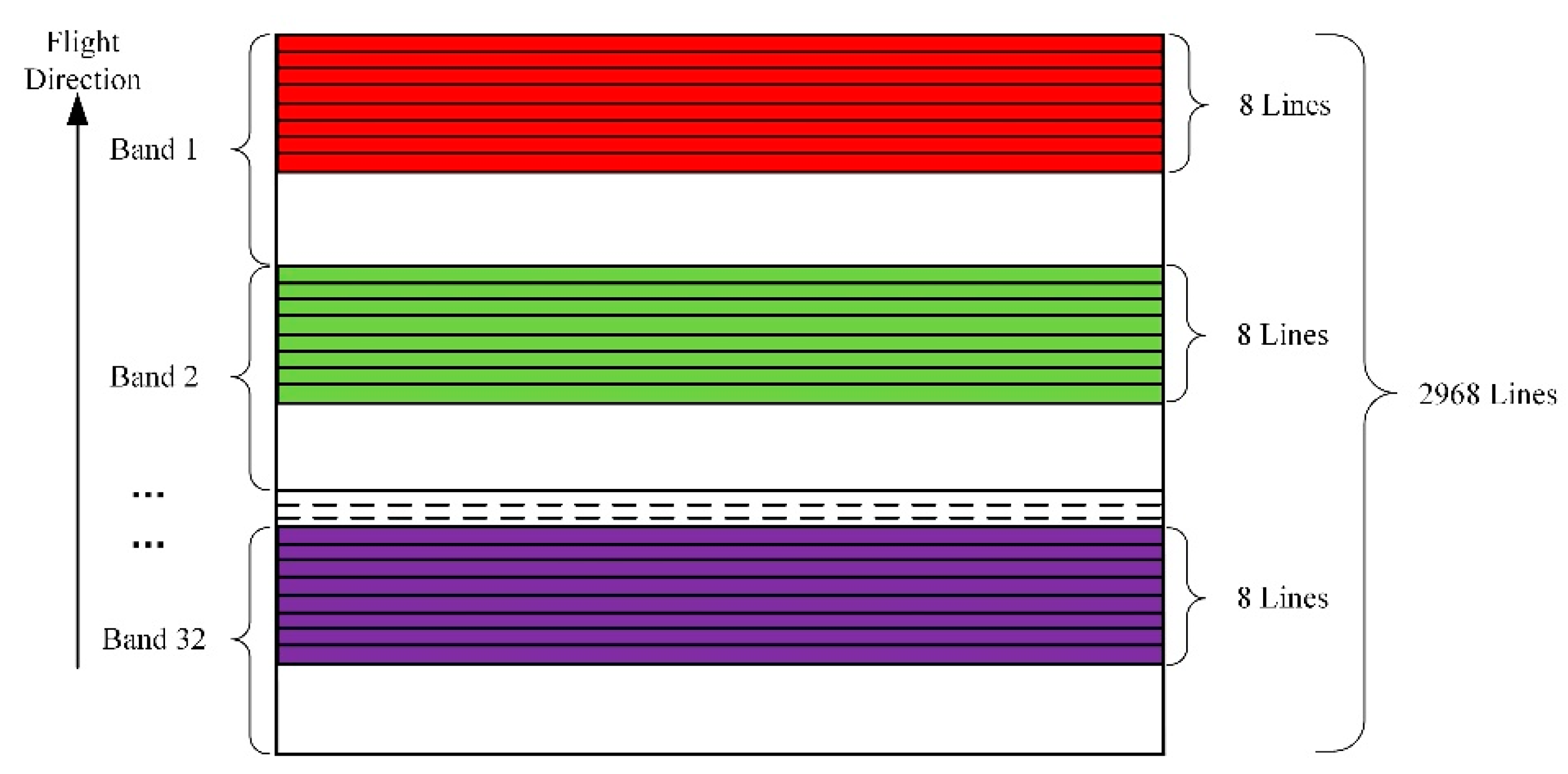
2. Materials
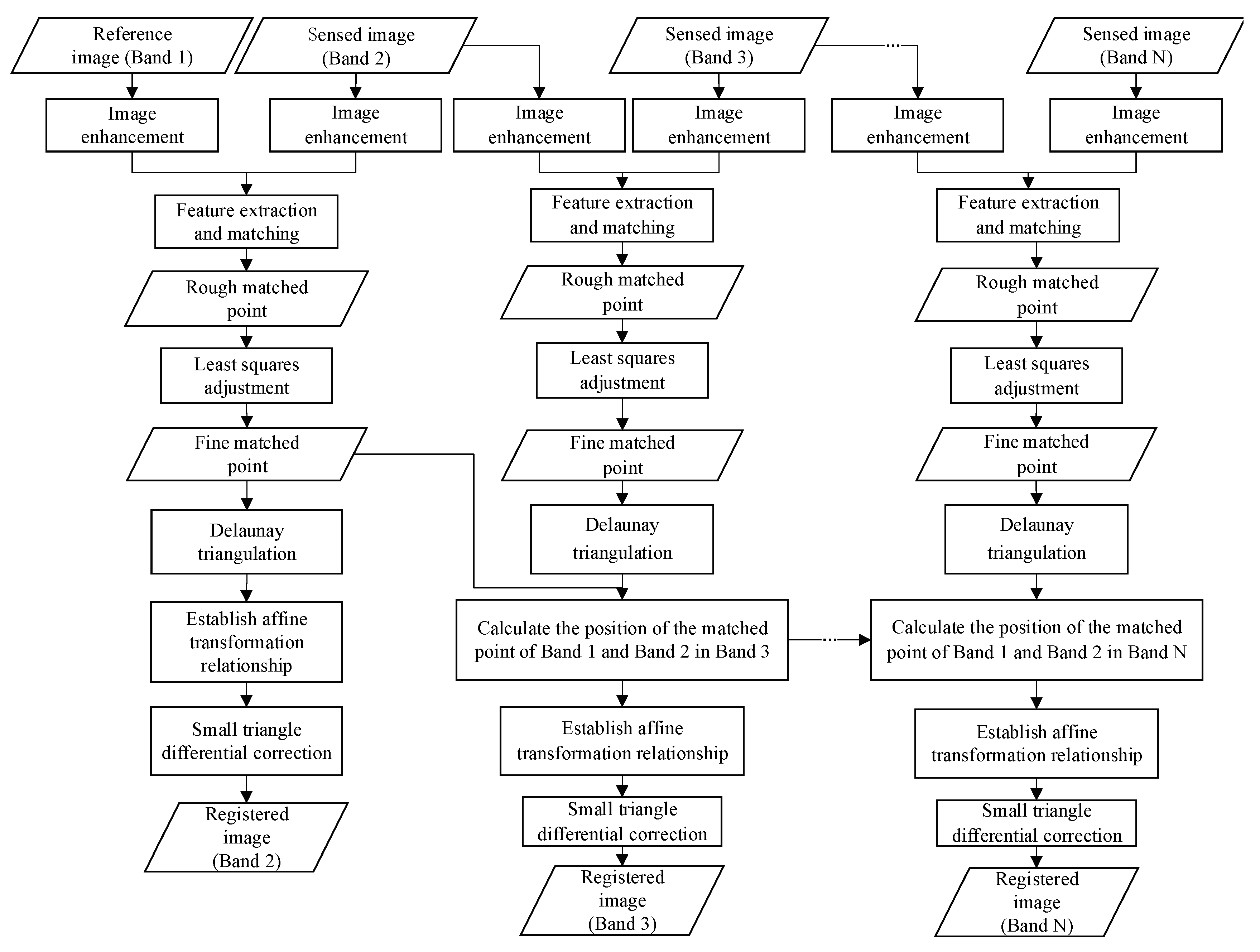
3. Methods
3.1. Relative Registration
3.1.1. Feature Matching of Adjacent Bands
3.1.2. Matching Point Adjustment
3.2. Absolute Registration
3.2.1. Delaunay Triangulation Construction
3.2.2. Affine Transformation Relationship Transfer Strategy
3.3. Evaluation Criteria
3.3.1. Coordinate Deviation of Homonymous Points
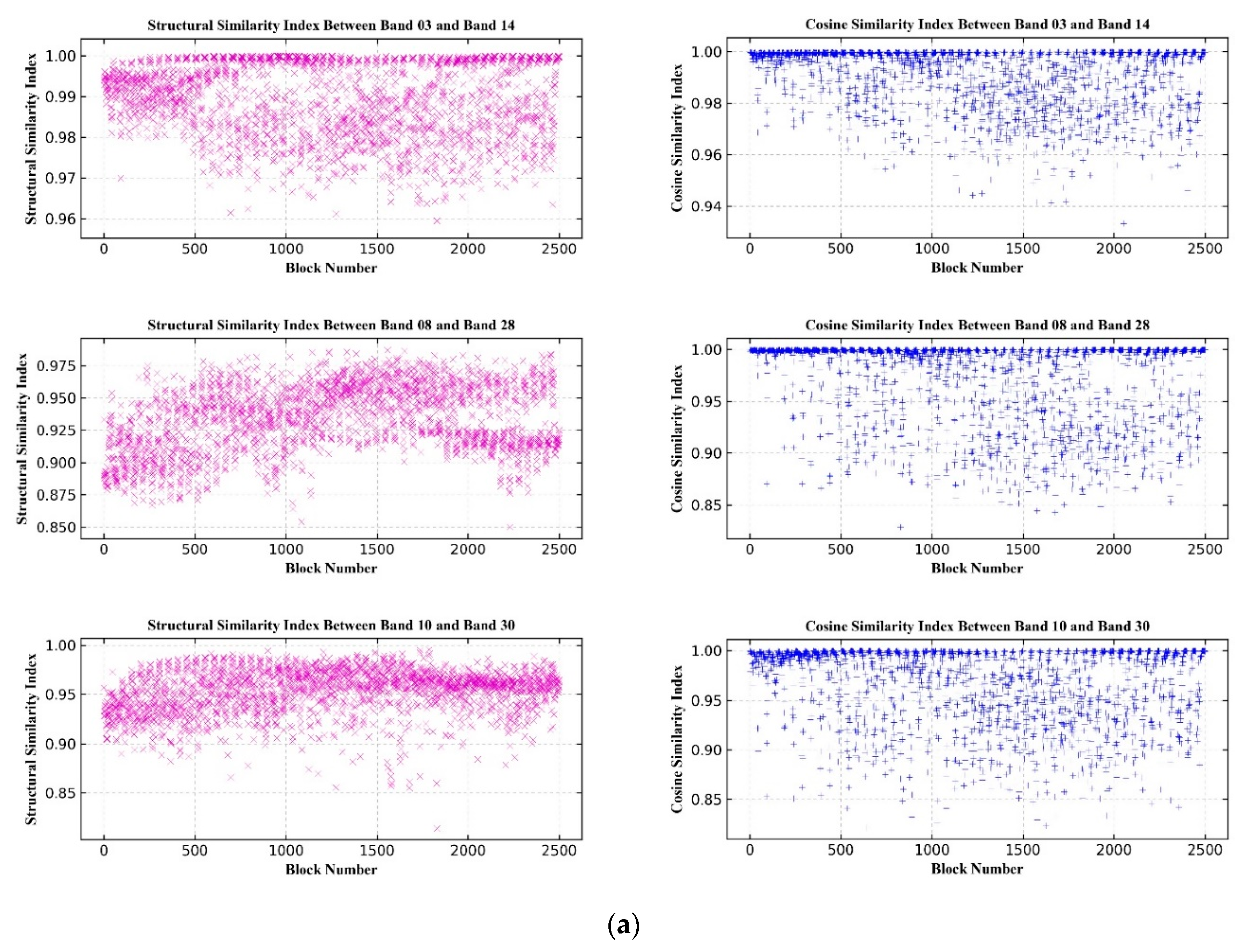
3.3.2. Similarity Measures
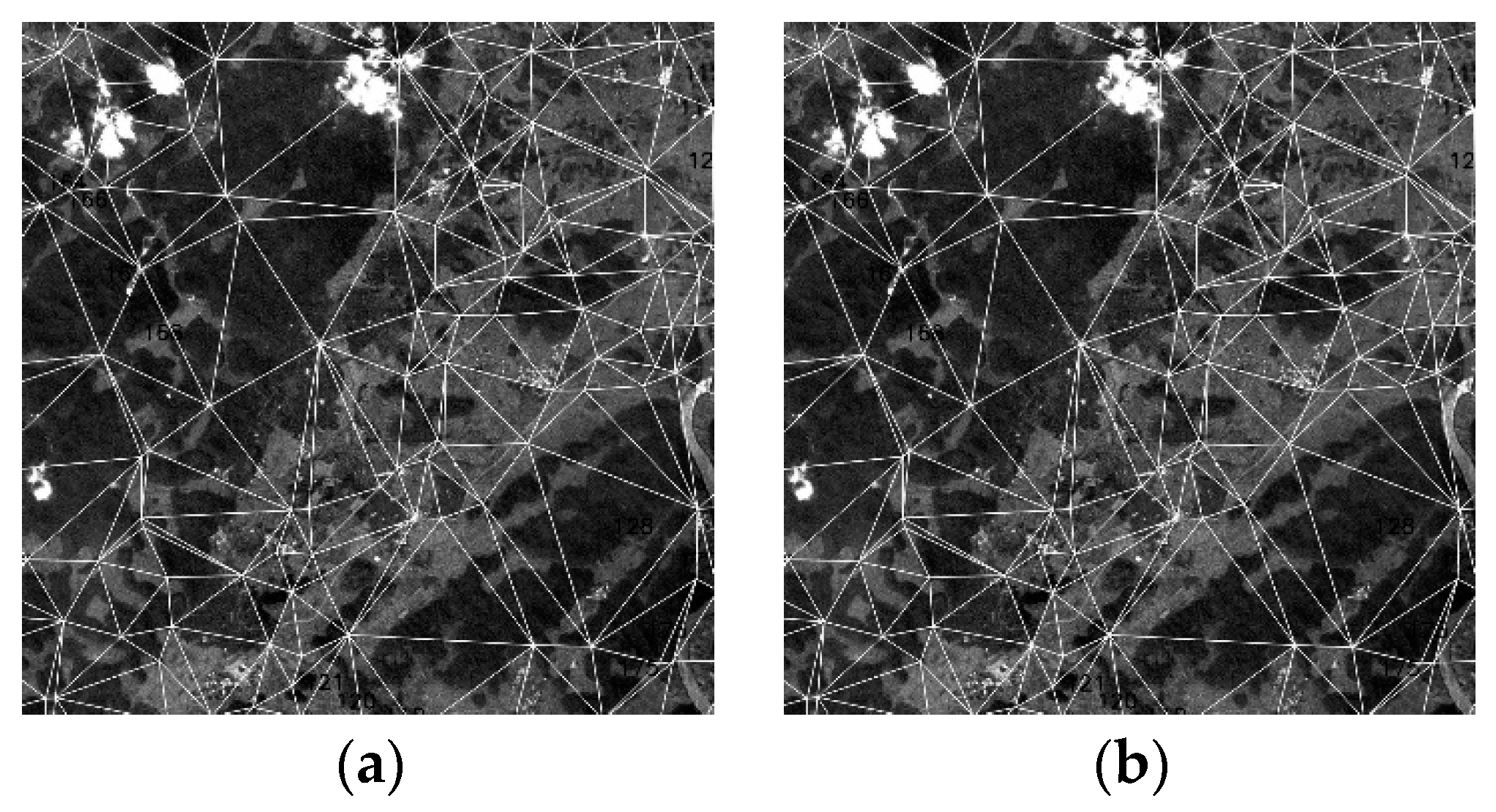
4. Results and Discussion
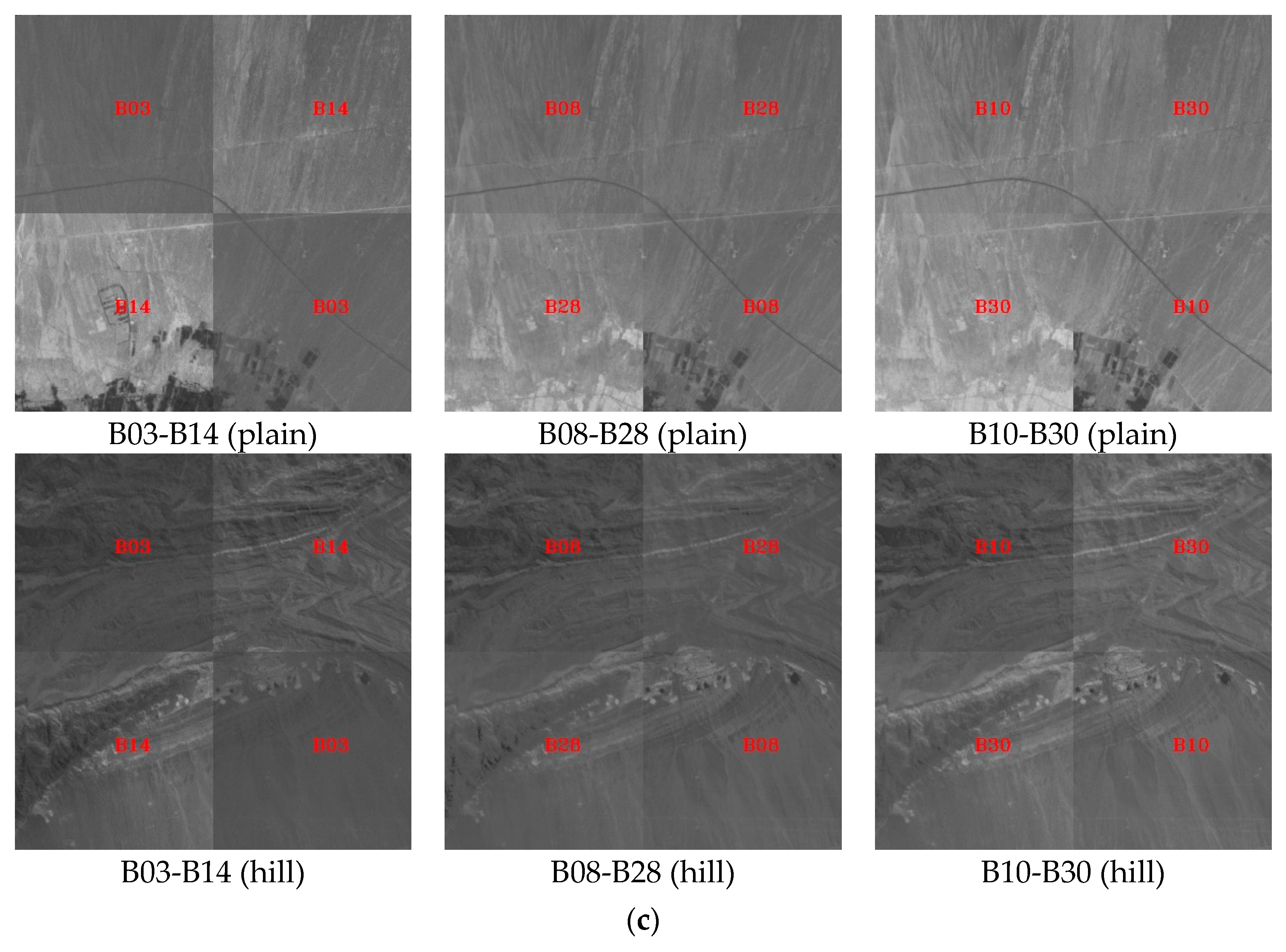
4.1. Experiment Results
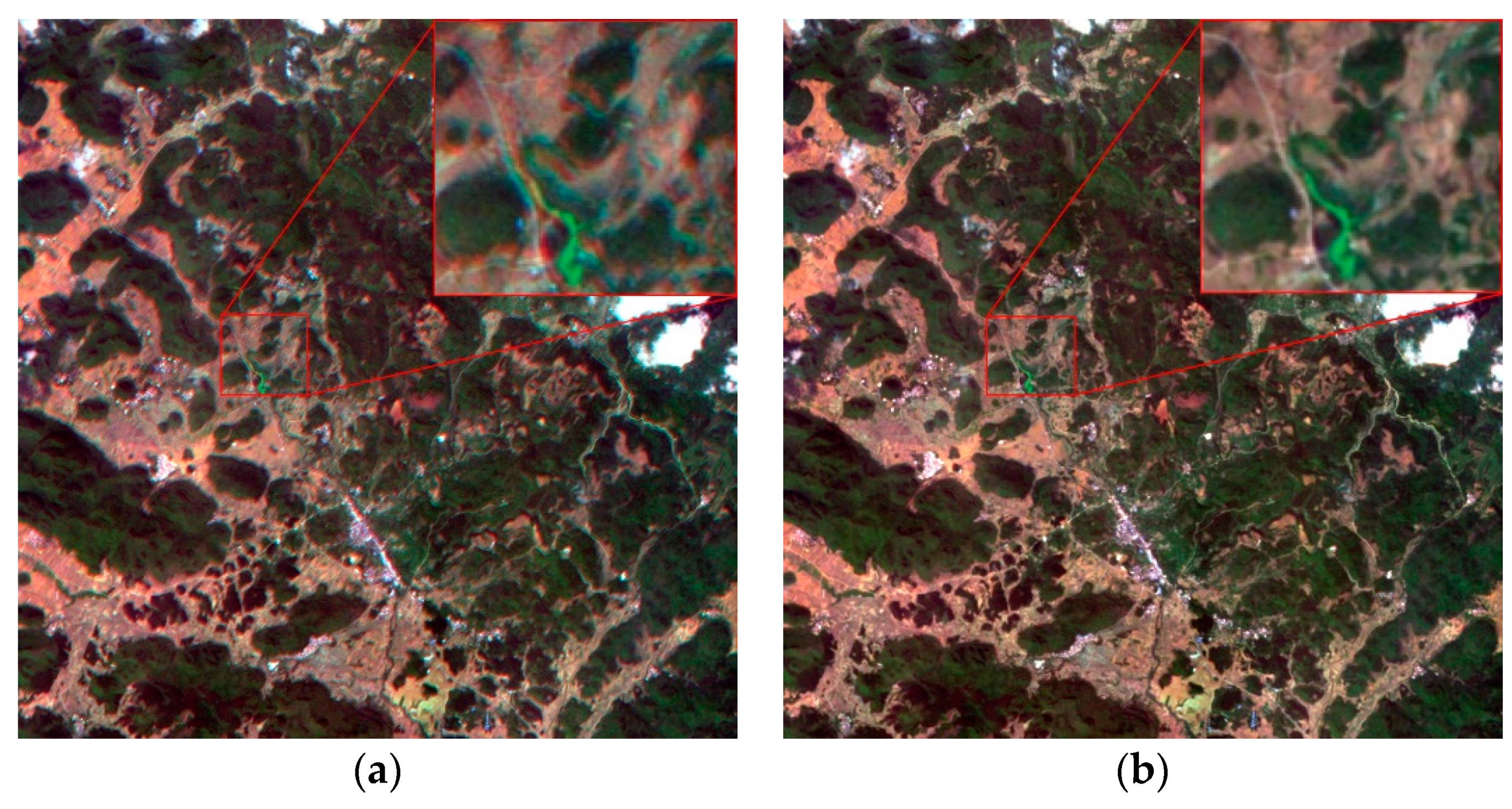
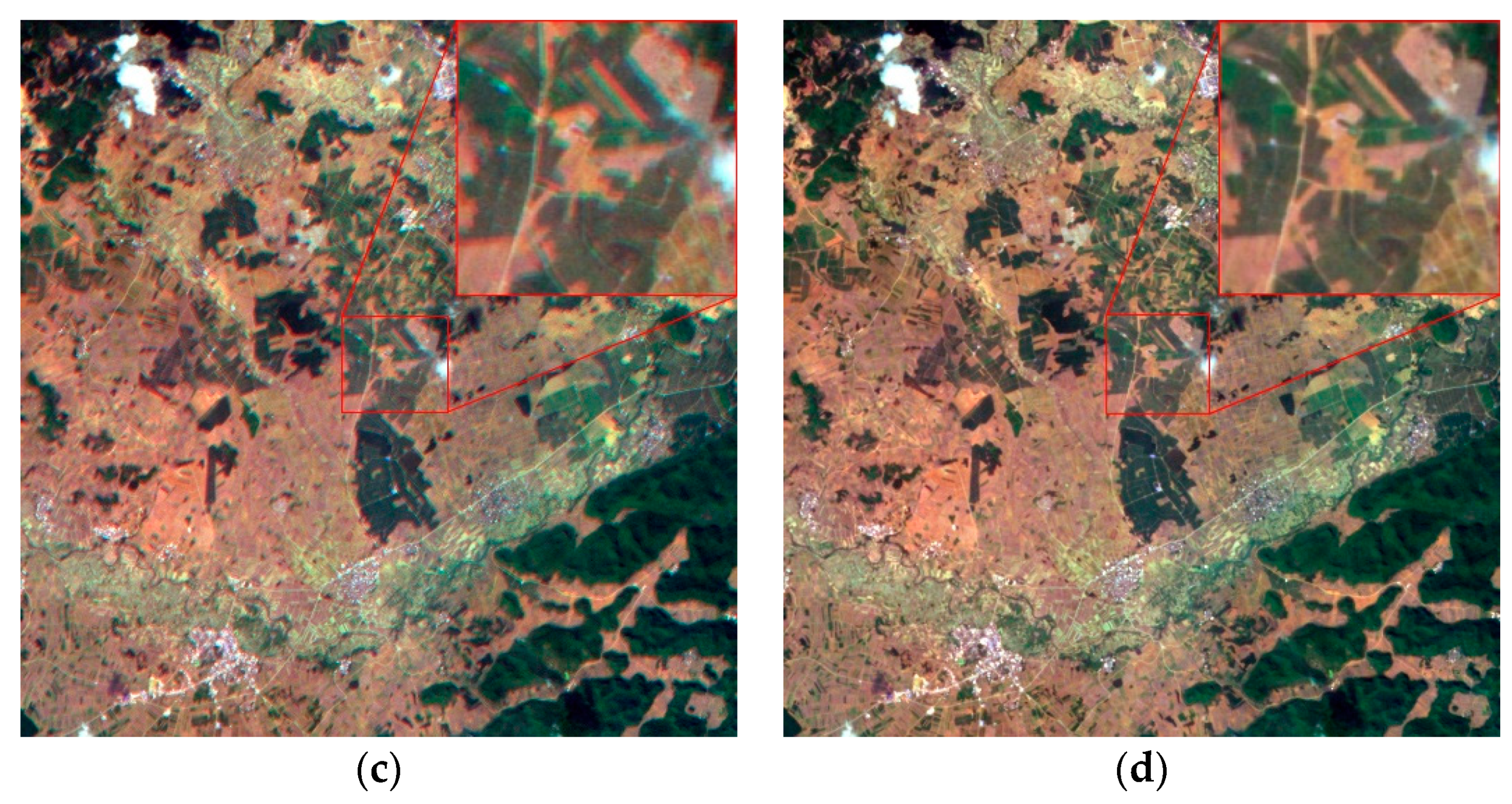
4.2. Comparison with IOEM Method
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Software Availability
References
- Orbita. Available online: https://www.myorbita.net/ (accessed on 10 September 2019).
- Li, Y.; Xu, N.; Fitzpatrick, J.M.; Dawant, B.M. Geometric distortion correction for echo planar images using nonrigid registration with spatially varying scale. Magn. Reson. Imaging 2008, 26, 1388–1397. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Q.; Wang, S.; Wang, B.; Sun, M. Automatic registration method for fusion of ZY-1-02C satellite images. Remote Sens. 2014, 6, 157–179. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Rangarajan, A.; Gader, P.D. An integrated approach to registration and fusion of hyperspectral and multispectral images. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3020–3033. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, K.; Powers, R. Assessment of the image misregistration effects on object-based change detection. ISPRS J. Photogramm. Remote Sens. 2014, 87, 19–27. [Google Scholar] [CrossRef]
- Manolakis, D.; Truslow, E.; Pieper, M.; Cooley, T.; Brueggeman, M. Detection algorithms in hyperspectral imaging systems: An overview of practical algorithms. IEEE Signal Process. Mag. 2014, 31, 24–33. [Google Scholar] [CrossRef]
- Liu, L.; Zhou, J.; Jiang, D.; Zhuang, D.; Mansaray, L.R.; Hu, Z.; Ji, Z. Mineral resources prospecting by synthetic application of TM/ETM+, quickbird and hyperion data in the hatu area, West Junggar, Xinjiang, China. Sci. Rep. 2016, 6, 21851. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, L.R.; Yao, D.; Li, Q.T.; Zhuang, L.N.; Zhang, B.; Bioucas-Dias, J.M. A new low-rank representation based hyperspectral image denoising method for mineral mapping. Remote Sens. 2017, 9, 1145. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.; Weng, Q.; Guo, H.; Feng, S.; Li, Q. Assessment of urban environmental change using multi-source remote sensing time series (2000–2016): A comparative analysis in selected megacities in Eurasia. Sci. Total Environ. 2019, 684, 567–577. [Google Scholar] [CrossRef]
- Zitová, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Oh, J. Automated Geo/Co-registration of multi-temporal very-high-resolution imagery. Sensors 2018, 18, 1599. [Google Scholar] [CrossRef] [Green Version]
- Reddy, B.S.; Chatterji, B.N. An FFT-based technique for translation, rotation, and scale-invariant image registration. IEEE Trans. Image Process. 1996, 5, 1266–1271. [Google Scholar] [CrossRef] [Green Version]
- Foroosh, H.; Zerubia, J.B.; Berthod, M. Extension of phase correlation to subpixel registration. IEEE Trans. Image Process. 2002, 11, 188–200. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.W.; Yin, S.; Yun, K.; Choi, J.Y. Spatio-temporal weighting in local patches for direct estimation of camera motion in video stabilization. Comput. Vis. Image Underst. 2014, 118, 71–83. [Google Scholar] [CrossRef]
- Xu, Q.; Zhang, Y.; Li, B. Improved SIFT match for optical satellite images registration by size classification of blob-like structures. Remote Sens. Lett. 2014, 5, 451–460. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Goncalves, H.; Corte-Real, L.; Goncalves, J.A. Automatic image registration through image segmentation and SIFT. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2589–2600. [Google Scholar] [CrossRef] [Green Version]
- Paul, S.; Pati, U.C. Remote sensing optical image registration using modified uniform robust sift. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1300–1304. [Google Scholar] [CrossRef]
- Mikolajczyk, K.; Schmid, C. A performance evaluation of local descriptors. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1615–1630. [Google Scholar] [CrossRef] [Green Version]
- Chum, O.; Matas, J. Optimal randomized RANSAC. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 1472–1482. [Google Scholar] [CrossRef] [Green Version]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Chum, O.; Matas, J. Matching with PROSAC-Progressive sample consensus. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 220–226. [Google Scholar] [CrossRef] [Green Version]
- Cao, S.X.; Jiang, J.; Zhang, G.J.; Yuan, Y. An edge-based scale- and affine-invariant algorithm for remote sensing image registration. Int. J. Remote Sens. 2013, 34, 2301–2326. [Google Scholar] [CrossRef]
- Yang, H.; Li, X.R.; Ma, Y.J.; Zhao, L.Y.; Chen, S.H. A high precision feature matching method based on geometrical outlier removal for remote sensing image registration. IEEE Access 2019, 7, 180027–180038. [Google Scholar] [CrossRef]
- Zhao, X.; Li, H.; Wang, P.; Jing, L. An Image Registration Method for Multisource High-Resolution Remote Sensing Images for Earthquake Disaster Assessment. Sensors 2020, 20, 2286. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Liu, Z.; Qiao, H. A Continuation Method for Graph Matching Based Feature Correspondence. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 1809–1822. [Google Scholar] [CrossRef] [PubMed]
- Aguilar, W.; Frauel, Y.; Escolano, F.; Martinez-Perez, M.E.; Espinosa-Romero, A.; Lozano, M.A. A robust Graph Transformation Matching for non-rigid registration. Image Vis. Comput. 2009, 27, 897–910. [Google Scholar] [CrossRef]
- Dou, J.; Li, J. Image matching based local Delaunay triangulation and affine invariant geometric constraint. Optik 2014, 125, 526–531. [Google Scholar] [CrossRef]
- Zhao, M.; An, B.; Wu, Y.; Chen, B.; Sun, S. A Robust delaunay triangulation matching for multispectral/multidate remote sensing image registration. IEEE Geosci. Remote Sens. Lett. 2015, 12, 711–715. [Google Scholar] [CrossRef]
- Zheng, J.; Xu, Q.; Zhai, B.; Wang, Y. Accurate hyperspectral and infrared satellite image registration method using structured topological constraints. Infrared Phys. Technol. 2020, 104, 103122. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, J.; Zhang, L.; Zhang, G.; Li, X.; Wu, J. Geometric processing and accuracy verification of Zhuhai-1 hyperspectral satellites. Remote Sens. 2019, 11, 996. [Google Scholar] [CrossRef] [Green Version]
- Hossein-Nejad, Z.; Nasri, M. An adaptive image registration method based on SIFT features and RANSAC transform. Comput. Electr. Eng. 2017, 62, 524–537. [Google Scholar] [CrossRef]
- Susan, S.; Jain, A.; Sharma, A.; Verma, S.; Jain, S. Fuzzy match index for scale-invariant feature transform (SIFT) features with application to face recognition with weak supervision. IET Image Process. 2015, 9, 951–958. [Google Scholar] [CrossRef]
- Guo, J.-H.; Yang, F.; Tan, H.; Wang, J.-X.; Liu, Z.-H. Image matching using structural similarity and geometric constraint approaches on remote sensing images. J. Appl. Remote Sens. 2016, 10, 1–12. [Google Scholar] [CrossRef]
- Nguyen, H.V.; Bai, L. Cosine Similarity Metric Learning for Face Verification. In Proceedings of Computer Vision—ACCV 2010; Springer: Berlin/Heidelberg, Germany, 2011; pp. 709–720. [Google Scholar]
- Yuan, Q.; Zhang, L.; Shen, H. Hyperspectral image denoising employing a spectral–spatial adaptive total variation model. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3660–3677. [Google Scholar] [CrossRef]
- Li, Q.; Chen, Z.; Zhang, B.; Li, B.; Lu, K.; Lu, L.; Guo, H. Detection of tailings dams using high-resolution satellite imagery and a single shot multibox detector in the Jing–Jin–Ji region, China. Remote Sens. 2020, 12, 2626. [Google Scholar] [CrossRef]
- Yu, B.; Yang, L.; Chen, F. Semantic segmentation for high spatial resolution remote sensing images based on convolution neural network and pyramid pooling module. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 3252–3261. [Google Scholar] [CrossRef]
- DeTone, D.; Malisiewicz, T.; Rabinovich, A. Deep image homography estimation. arXiv 2016, arXiv:1606.03798. [Google Scholar]
- Yang, Z.; Dan, T.; Yang, Y. Multi-temporal remote sensing image registration using deep convolutional features. IEEE Access 2018, 6, 38544–38555. [Google Scholar] [CrossRef]
- Lu, L.; Guo, H.; Corbane, C.; Li, Q. Urban sprawl in provincial capital cities in China: Evidence from multi-temporal urban land products using Landsat data. Sci. Bull. 2019, 64, 955–957. [Google Scholar] [CrossRef] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Index | |
|---|---|---|
| Satellite | Total satellite mass | 67 kg |
| Orbit height | 500 km | |
| Orbit inclination angle | 98° | |
| Regression cycle | 2.5 days | |
| Payload | Detector size | 4.25 µm |
| Field of view (FOV) | 20.5° | |
| Spectral range | 400–1000 nm | |
| Quantitative level | 12 bits | |
| Band number | 32 | |
| Signal Noise Ratio (SNR) | ≥300 dB | |
| Ground sample distance | 10 m | |
| Spectral resolution | 2.5 nm | |
| Ground swath | 150 km |
| Name | Long/Lat | Imaging Time | Minimum/Maximum Elevation(m) | Lateral Angle |
|---|---|---|---|---|
| OHS-Arizona-USA | −114.7/32.6 | 2020-04-02 | 18/633 | −12.688 |
| OHS-Guang Xi-China | 107.4/22.6 | 2020-04-15 | 93/1023 | −1.88 |
| OHS-Xin Jiang-China | 89.8/43.0 | 2020-05-29 | −60/3801 | −5.703 |
| Name | Method | RMSE (Pixel) | Mean RMSE (Pixel) | ||
|---|---|---|---|---|---|
| B03-B14 | B08-B28 | B10-B30 | |||
| OHS-Arizona-USA | IOEM | 1.68 | 2.02 | 1.60 | 1.77 |
| Our method | 0.68 | 0.39 | 0.42 | 0.50 | |
| OHS-Guangxi-China | IOEM | 2.28 | 3.34 | 3.76 | 3.13 |
| Our method | 0.52 | 0.54 | 0.53 | 0.53 | |
| OHS-Xinjiang-China | IOEM | 1.00 | 1.03 | 1.24 | 1.09 |
| Our method | 0.58 | 0.72 | 0.49 | 0.60 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, J.; Wu, J.; Lu, L.; Li, Q.; Zhang, Q.; Feng, S.; Yan, J. A Full-Spectrum Registration Method for Zhuhai-1 Satellite Hyperspectral Imagery. Sensors 2020, 20, 6298. https://doi.org/10.3390/s20216298
Meng J, Wu J, Lu L, Li Q, Zhang Q, Feng S, Yan J. A Full-Spectrum Registration Method for Zhuhai-1 Satellite Hyperspectral Imagery. Sensors. 2020; 20(21):6298. https://doi.org/10.3390/s20216298
Chicago/Turabian StyleMeng, Jinjun, Jiaqi Wu, Linlin Lu, Qingting Li, Qiang Zhang, Suyun Feng, and Jun Yan. 2020. "A Full-Spectrum Registration Method for Zhuhai-1 Satellite Hyperspectral Imagery" Sensors 20, no. 21: 6298. https://doi.org/10.3390/s20216298
APA StyleMeng, J., Wu, J., Lu, L., Li, Q., Zhang, Q., Feng, S., & Yan, J. (2020). A Full-Spectrum Registration Method for Zhuhai-1 Satellite Hyperspectral Imagery. Sensors, 20(21), 6298. https://doi.org/10.3390/s20216298