MAELASviewer: An Online Tool to Visualize Magnetostriction


Abstract
:
1. Introduction
2. Overview of Magnetostriction
2.1. Theoretical Description
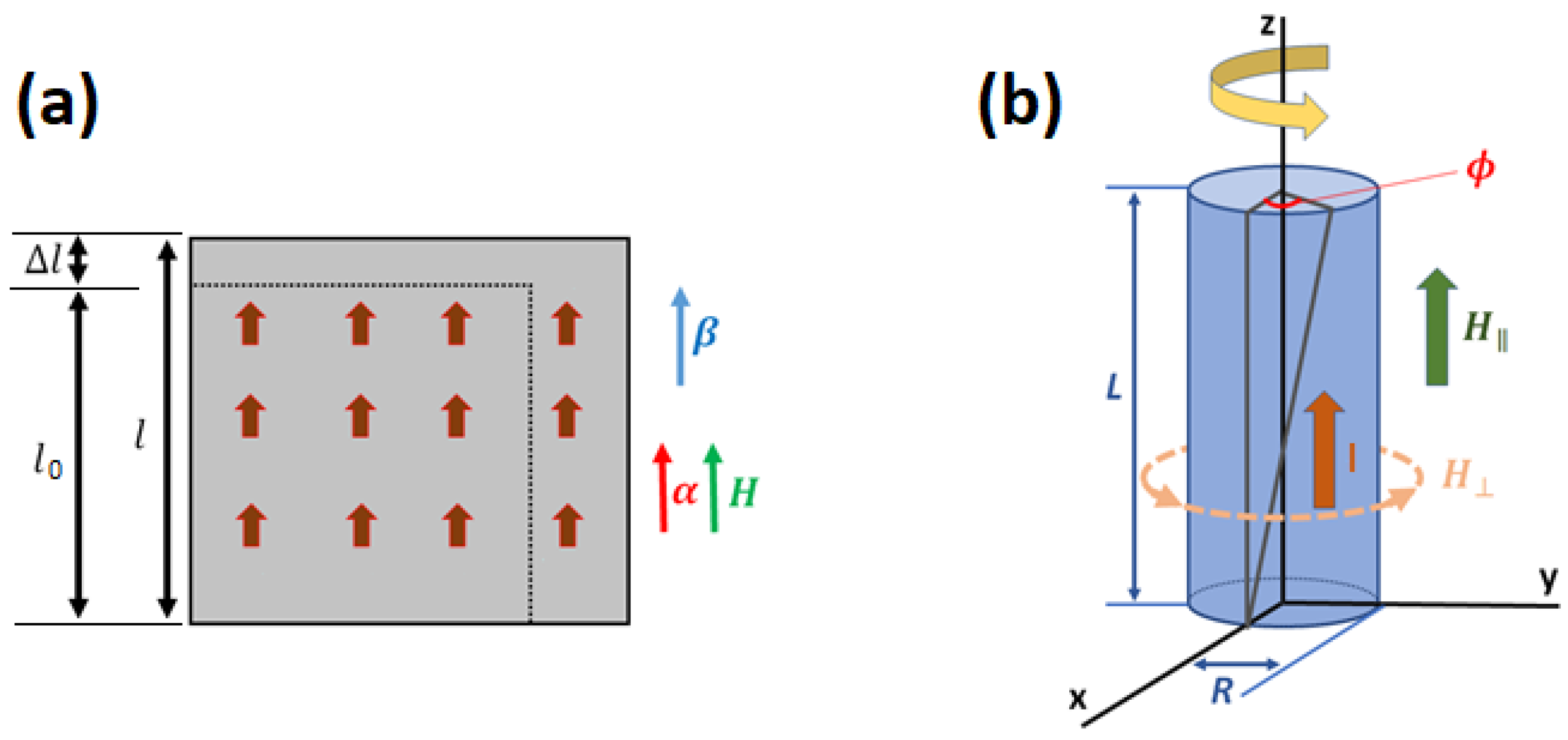
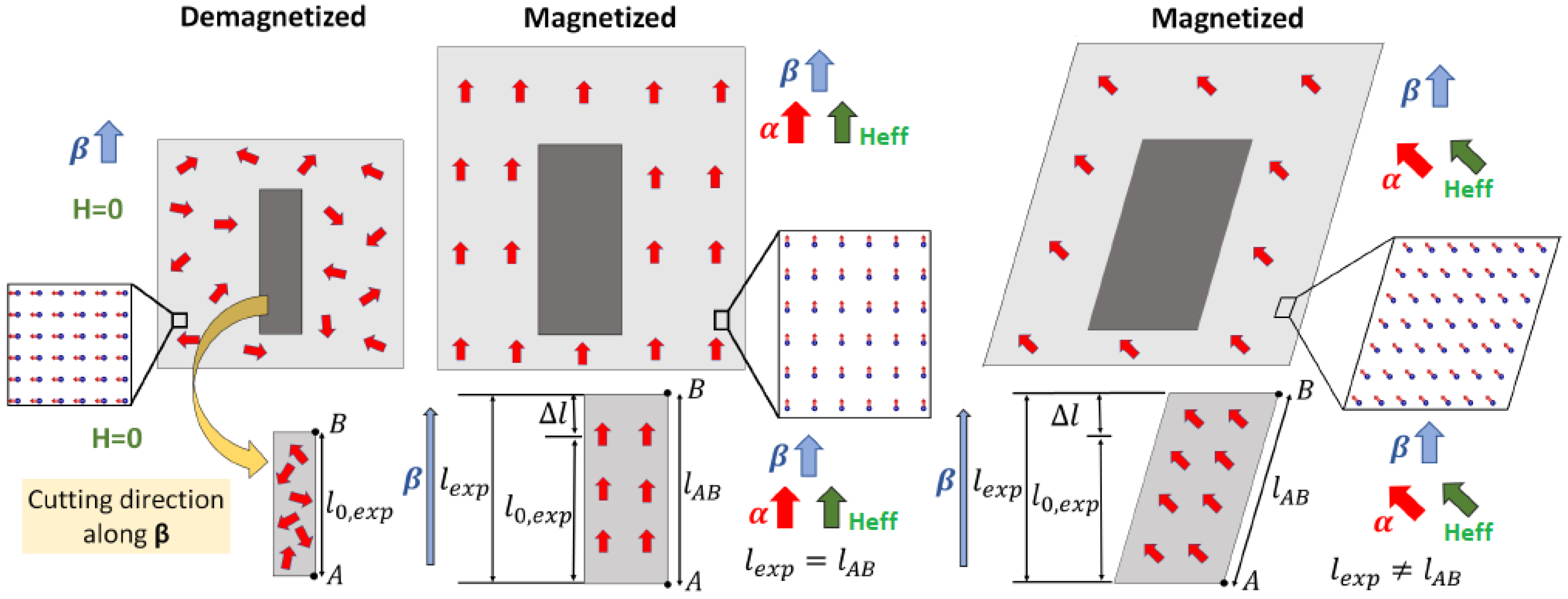
2.1.1. Relative Length Change Due to the Joule Effect
2.1.2. Deformation Due to the Joule Effect
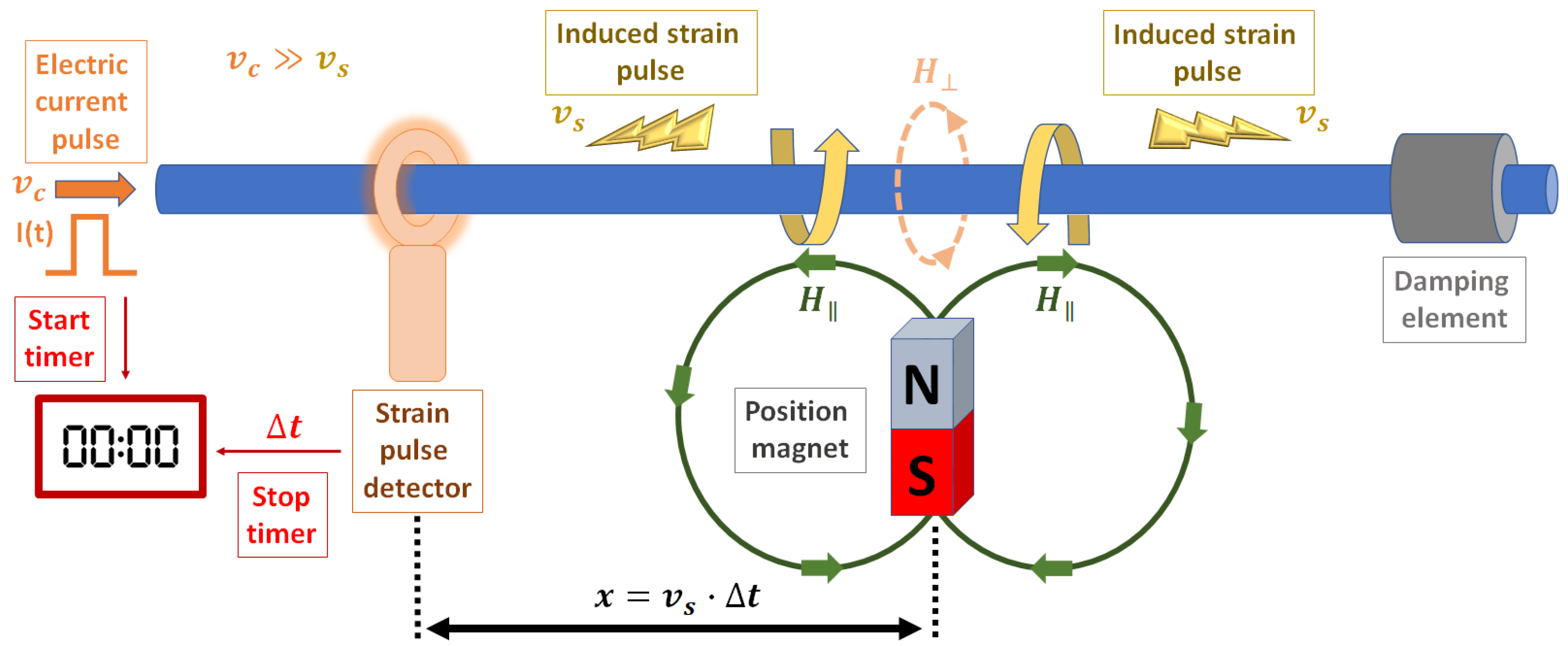
2.1.3. The Wiedemann Effect
2.1.4. Magnetocrystalline Anisotropy
2.2. Magnetostrictive Materials
2.3. Applications of Magnetostriction
3. Methodology
3.1. Software Details
3.2. Modeling of the Joule Effect
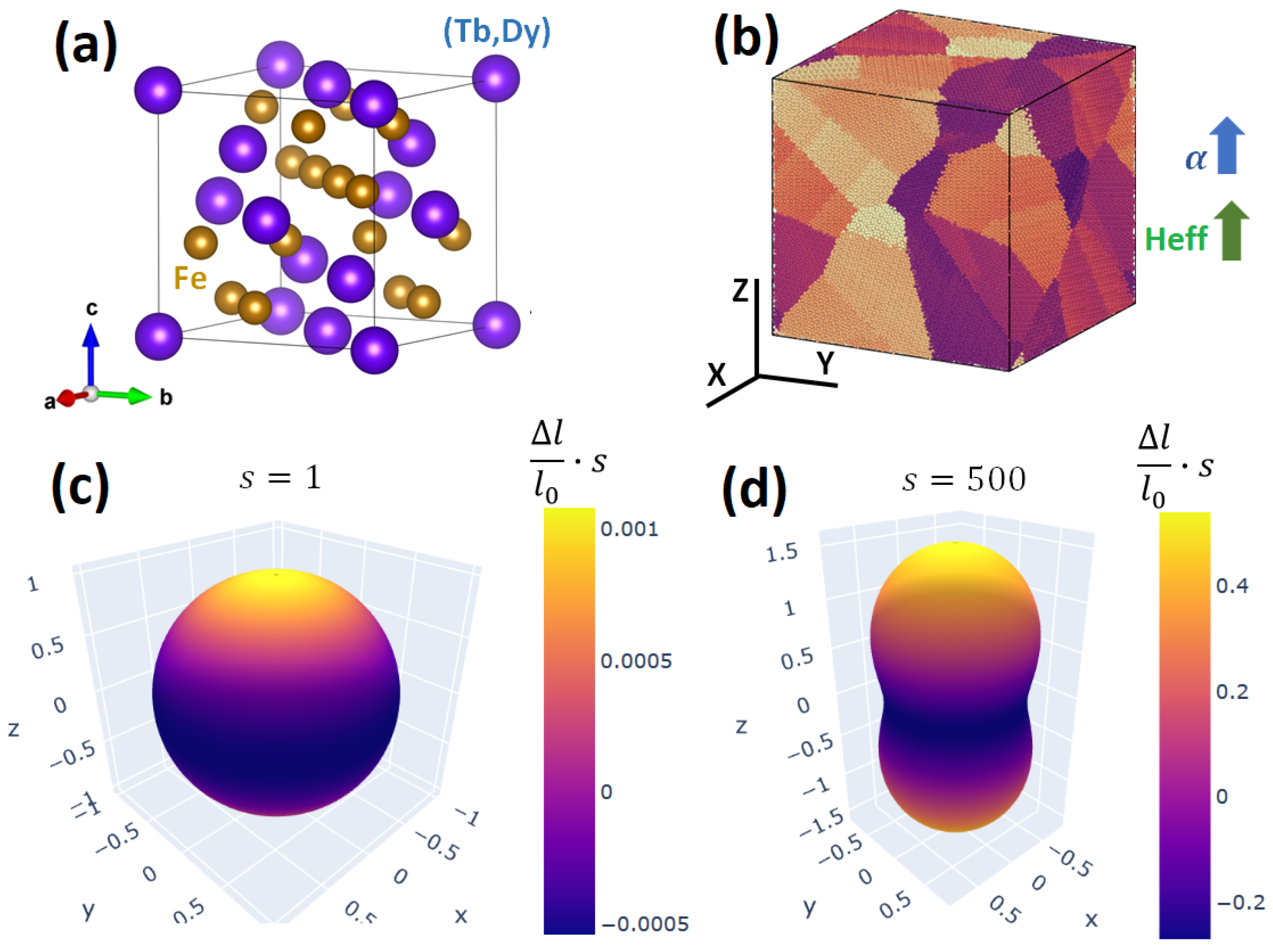
3.2.1. Mapping the Joule Effect to a Sphere
3.2.2. Applications and Physical Interpretation
3.2.3. Magnetic Field and Temperature Effects
3.3. Modeling of the Wiedemann Effect
4. Graphical User Interface
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dapino, M. Encyclopedia of Smart Materials; Chapter Magnetostrictive Materials: Their Use in Smart Structure Applications; John Wiley and Sons, Inc.: New York, NY, USA, 2000; pp. 600–620. [Google Scholar]
- Calkins, F.T.; Flatau, A.B.; Dapino, M.J. Overview of Magnetostrictive Sensor Technology. J. Intell. Mater. Syst. Struct. 2007, 18, 1057–1066. [Google Scholar] [CrossRef]
- Ekreem, N.; Olabi, A.; Prescott, T.; Rafferty, A.; Hashmi, M. An overview of magnetostriction, its use and methods to measure these properties. J. Mater. Process. Technol. 2007, 191, 96–101. [Google Scholar] [CrossRef]
- Apicella, V.; Clemente, C.S.; Davino, D.; Leone, D.; Visone, C. Review of Modeling and Control of Magnetostrictive Actuators. Actuators 2019, 8, 45. [Google Scholar] [CrossRef] [Green Version]
- Gibbs, M. Modern Trends in Magnetostriction; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Gaillac, R.; Pullumbi, P.; Coudert, F.X. ELATE: An open-source online application for analysis and visualization of elastic tensors. J. Phys. Condens. Matter 2016, 28, 275201. [Google Scholar] [CrossRef] [PubMed]
- Nieves, P.; Arapan, S.; Zhang, S.H.; Kądzielawa, A.P.; Zhang, R.F.; Legut, D. MAELAS: MAgneto-ELAStic properties calculation via computational high-throughput approach. arXiv 2020, arXiv:2009.01638. [Google Scholar]
- MAELAS. Available online: https://github.com/pnieves2019/MAELAS (accessed on 11 November 2020).
- Cullen, J.R.; Clark, A.E.; Hathaway, K.B. Materials, Science and Technology; Chapter 16—Magnetostrictive Materials; VCH Publishings: Weinheim, Germany, 1994; pp. 529–565. [Google Scholar]
- Clark, A. Chapter 7 Magnetostrictive rare earth-Fe2 compounds. In Handbook of Ferromagnetic Materials; Elsevier: Amsterdam, The Netherlands, 1980; Volume 1, pp. 531–589. [Google Scholar] [CrossRef]
- Engdahl, G. Handbook of Giant Magnetostrictive Materials; Academic Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Du Trémolet de Lacheisserie, É.; Gignoux, D.; Schlenker, M. Magnetoelastic Effects. In Magnetism; Springer: New York, NY, USA, 2002; pp. 351–398. [Google Scholar] [CrossRef]
- O’Handley, R.C. Modern Magnetic Materials; Wiley: Hoboken, NJ, USA, 2000. [Google Scholar]
- Clark, A.E.; DeSavage, B.F.; Bozorth, R. Anomalous Thermal Expansion and Magnetostriction of Single-Crystal Dysprosium. Phys. Rev. 1965, 138, A216–A224. [Google Scholar] [CrossRef]
- Lee, E.W. Magnetostriction and Magnetomechanical Effects. Rep. Prog. Phys. 1955, 18, 184–229. [Google Scholar] [CrossRef]
- Birss, R. The saturation magnetostriction of ferromagnetics. Adv. Phys. 1959, 8, 252–291. [Google Scholar] [CrossRef]
- Landau, L.D.; Lifshitz, E.M. Theory of Elasticity; Sykes, J.B.; Reid, W.H., Translators; Pergamon: London, UK, 1959; p. 134. [Google Scholar]
- COMSOL Multiphysics. Available online: https://comsol.com (accessed on 11 November 2020).
- Benatar, J.G. FEM Implementations of Magnetostrictive-Based Applications. Ph.D. Thesis, The University of Maryland, College Park, MD, USA, 2005. [Google Scholar]
- Feynman, R.P.; Leighton, R.B.; Sands, M. Lectures of Physics, Vol. II; Basic Books: New York, NY, USA, 2011. [Google Scholar]
- Joule, J. On a new class of magnetic forces. Ann. Electr. Magn. Chem. 1842, 8, 219–224. [Google Scholar]
- Andreev, A. Chapter 2 Thermal expansion anomalies and spontaneous magnetostriction in rare-earth intermetallics with cobalt and iron. In Handbook of Magnetic Materials; Elsevier: Amsterdam, The Netherlands, 1995; Volume 8, pp. 59–187. [Google Scholar] [CrossRef]
- Massari, S.; Ruberti, M. Rare earth elements as critical raw materials: Focus on international markets and future strategies. Resour. Policy 2013, 38, 36–43. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Y.N.; Wu, R.Q.; Sun, L.Z.; Xu, D.S.; Zhang, Z.D. Understanding strong magnetostriction in Fe100-xGax alloys. Sci. Rep. 2013, 3, 3521. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fritsch, D.; Ederer, C. First-principles calculation of magnetoelastic coefficients and magnetostriction in the spinel ferrites CoFe2O4 and NiFe2O4. Phys. Rev. B 2012, 86, 014406. [Google Scholar] [CrossRef] [Green Version]
- Garshelis, I.J. A torque transducer utilizing a circularly polarized ring. IEEE Trans. Magn. 1992, 28, 2202–2204. [Google Scholar] [CrossRef]
- Sensorland. Available online: https://www.sensorland.com/HowPage024.html (accessed on 11 November 2020).
- Yao, Y.; Pan, Y.; Liu, S. Power ultrasound and its applications: A state-of-the-art review. Ultrason. Sonochem. 2020, 62, 104722. [Google Scholar] [CrossRef] [PubMed]
- Olabi, A.; Grunwald, A. Design and application of magnetostrictive materials. Mater. Des. 2008, 29, 469–483. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Huang, M.; Wang, X.; Song, W. Development of a magnetostrictive drive rotary motor driven by circular parallel movement. Smart Mater. Struct. 2007, 16, 2063–2066. [Google Scholar] [CrossRef]
- Miesner, J.E.; Teter, J.P. Piezoelectric/magnetostrictive resonant inchworm motor. In Smart Structures and Materials 1994: Smart Structures and Intelligent Systems; Hagood, N.W., Ed.; International Society for Optics and Photonics (SPIE): Orlando, FL, USA, 1994; Volume 2190, pp. 520–527. [Google Scholar] [CrossRef]
- Dash. Available online: https://dash.plotly.com/ (accessed on 11 November 2020).
- Flask. Available online: https://flask.palletsprojects.com/en/1.1.x/ (accessed on 11 November 2020).
- Plotly. Available online: https://plotly.com/python/ (accessed on 11 November 2020).
- Heroku. Available online: https://www.heroku.com/ (accessed on 11 November 2020).
- Charitat, T.; Graner, F. About the magnetic field of a finite wire. Eur. J. Phys. 2003, 24, 267–270. [Google Scholar] [CrossRef] [Green Version]
- Pidgeon, H.A. Magneto-Striction with Special Reference to Pure Cobalt. Phys. Rev. 1919, 13, 209–237. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Temperature (K) | |||
|---|---|---|---|---|
| (BCC) Fe | 4.2 | 26 | −30 | - |
| (BCC) Fe | 300 | 21 | −21 | −7 |
| (FCC) Ni | 4.2 | −60 | −35 | - |
| (FCC) Ni | 300 | −46 | −24 | −34 |
| (Laves phase C15) SmFe2 | 4.2 | 30 | −4100 | - |
| (Laves phase C15) DyFe2 | 4.2 | −70 | 3000 | - |
| (Laves phase C15) TbCo | 4.2 | −1200 | 4500 | - |
| (Laves phase C15) ErCo | 4.2 | −1000 | −2500 | - |
| (Laves phase C15) Terfenol-D | 300 | 90 | 1600 | 1080 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nieves, P.; Arapan, S.; Kądzielawa, A.P.; Legut, D. MAELASviewer: An Online Tool to Visualize Magnetostriction. Sensors 2020, 20, 6436. https://doi.org/10.3390/s20226436
Nieves P, Arapan S, Kądzielawa AP, Legut D. MAELASviewer: An Online Tool to Visualize Magnetostriction. Sensors. 2020; 20(22):6436. https://doi.org/10.3390/s20226436
Chicago/Turabian StyleNieves, Pablo, Sergiu Arapan, Andrzej Piotr Kądzielawa, and Dominik Legut. 2020. "MAELASviewer: An Online Tool to Visualize Magnetostriction" Sensors 20, no. 22: 6436. https://doi.org/10.3390/s20226436
APA StyleNieves, P., Arapan, S., Kądzielawa, A. P., & Legut, D. (2020). MAELASviewer: An Online Tool to Visualize Magnetostriction. Sensors, 20(22), 6436. https://doi.org/10.3390/s20226436