A Hybrid Active Noise Control System for the Attenuation of Road Noise Inside a Vehicle Cabin


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Multichannel sHANC System
3. Active Noise Control of Road Noise Based on Multichannel sHANC System
3.1. Experimental Arrangement
- Vibration sensors: 12 triaxial accelerometers were numbered as references. They were mounted on the four suspension systems and tires, where the characteristics of road excitation transmitted through the structure can be captured, such as the hubs of the axle, as shown in Figure 2b, the bushings of the sub-frame, the joints between the bodywork and sub-frame, as shown in Figure 2c, and so on. Each accelerometer had three axes, so a total of 36 vibration signals were measured.
- Microphone sensors: 10 microphones located on the floor of the vehicle cabin were numbered as references, and the exact position of each microphone is shown in Figure 2d.
3.2. Selection of Reference Signals
3.3. Plant Response Measurement
3.4. The Attenuation Performance of Multichannel sHANC System
4. Optimization of Attenuation Performance for Road Noise Control
4.1. Proposed Modified System
4.2. Performance Assessment of the msHANC System
4.3. Effect of Time Delays on Performance
5. Conclusions
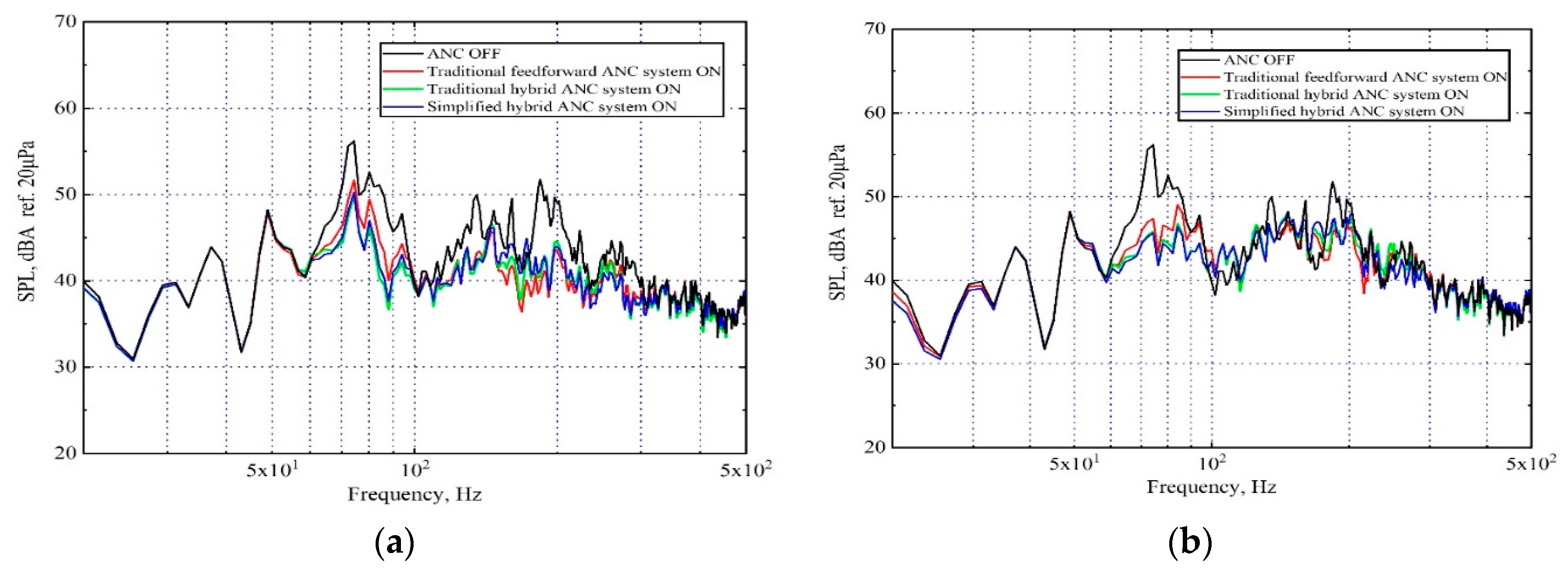
- The attenuation performance of the multichannel sHANC system was off-line analyzed, using the disturbance signals along with two types of reference signals: (a) ten vibration reference signals provided by accelerometers on the suspensions and bodywork of the vehicle, which were chosen out of 36 options; (b) ten acoustical reference signals provided by microphones on the floor of the cabin. It has been shown that, compared to the traditional feedforward system, the sHANC system using two types of reference signals can produce a significant suppression of the narrowband peak noise between 75 and 80 Hz, but the sHANC system lost the control capability in a broadband range of 100–500 Hz by using acoustical reference signals. It was also shown that compared to traditional hybrid control systems, the sHANC system can achieve similar noise reduction.
- The msHANC system using both vibrational reference signals and acoustical reference signals was proposed firstly. The system cleverly combined the benefits of using two different types of reference signals. The results showed that four reference accelerometers can be substituted by ten microphones without damaging the control performance, achieving around 3.7 dBA overall reduction. The system provided the potential to reduce the required number of accelerometers by using a few low-cost microphones, such as micro-electro-mechanical system (MEMS) microphones, which can further reduce the practical implementation costs.
- The effect of time delays on the reduction performance of the proposed systems was investigated. It has been shown that the msHANC was more sensitive to the delays compared to the sHANC system using only vibrational reference signals. When the additional delays exceeded 20 ms, the msHANC system lost the capacity to control the disturbance.
Author Contributions
Funding
Conflicts of Interest
References
- Chu, Z.; Wang, H.; Chen, C.; Yan, H.; Kang, R. Source path contribution analysis for vehicle indoor pass-by noise. Sound Vib. 2017, 51, 2–6. [Google Scholar]
- Liu, N.; Sun, Y.; Wang, Y.; Guo, H.; Gao, B.; Feng, T.; Sun, P. Active control for vehicle interior noise using the improved iterative variable step-size and variable tap-length LMS algorithms. Noise Control Eng. J. 2019, 67, 407–414. [Google Scholar] [CrossRef]
- Elliott, S.J.; Nelson, P.; McDonald, A.M.; Quinn, D.C.; Saunders, T. The active control of engine noise inside cars. In Proceedings of the INTER-NOISE, Avignon, France, 30 August–1 September 1988; pp. 987–990. [Google Scholar]
- Hasegawa, S.; Tabata, T.; Kinoshita, A.; Hyodo, H. The Development of an Active Noise Control System for Automobiles. Soc. Auto Eng. 1992, 922086. [Google Scholar] [CrossRef]
- Schirmacher, R.; Kunkel, R.; Burghardt, M. Active Noise Control for the 4.0 TFSI with Cylinder on Demand Technology in Audi’s S-Series. Soc. Auto Eng. 2012, 1533. [Google Scholar] [CrossRef]
- Cheer, J. Active Control of the Acoustic Environment in an Automobile Cabin. Ph.D. Thesis, University of Southampton, Southampton, UK, 2012. [Google Scholar]
- Duan, J.; Li, M.; Lim, T.; Lee, M.-R.; Cheng, M.-T.; Vanhaaften, W.; Abe, T. Combined Feedforward Feedback Active Control of Road Noise Inside a Vehicle Cabin. J. Vib. Acoust. 2014, 136, 041020. [Google Scholar] [CrossRef]
- Padhi, T.; Chandra, M.; Kar, A.; Swamy, M.N. Design and analysis of an improved hybrid active noise control system. Appl. Acoust. 2017, 127, 260–269. [Google Scholar] [CrossRef]
- Wu, L.; Qiu, X.; Guo, Y. A simplified adaptive feedback active noise control system. Appl. Acoust. 2014, 815, 40–46. [Google Scholar] [CrossRef]
- Wu, L.; Burnett, I.; Guo, Y. Decoupling feedforward and feedback structures in hybrid active noise control systems for uncorrelated narrowband disturbances. J. Sound Vib. 2015, 350, 1–10. [Google Scholar] [CrossRef]
- Sutton, T.; Elliott, S.; McDonald, A.; Saunders, T. Active control of road noise inside vehicles. Noise Control Eng. J. 1994, 42, 137–147. [Google Scholar] [CrossRef]
- Oh, S.-H.; Kim, H.; Park, Y. Active control of road booming noise in automotive interiors. J. Acoust. Soc. Am. 2002, 111, 180–188. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mohammad, J.; Elliott, S.; Mackay, A. The performance of active control of random noise in cars (L). J. Acoust. Soc. Am. 2008, 123, 1838–1841. [Google Scholar] [CrossRef] [PubMed]
- Cheer, J.; Elliott, S. Multichannel control systems for the attenuation of interior road noise in vehicles. Mech. Syst. Signal Proc. 2015, 60–61, 753–769. [Google Scholar] [CrossRef] [Green Version]
- Jung, W.; Elliott, S.; Cheer, J. Local active control of road noise inside a vehicle. Mech. Syst. Signal Proc. 2018, 121, 144–157. [Google Scholar] [CrossRef] [Green Version]
- Elliot, S.J. Signal Processing for Active Control; Academic Press: London, UK, 2001. [Google Scholar]
- Mazur, K.; Wrona, S.; Pawełczyk, M. Active noise control for a washing machine. Appl. Acoust. 2019, 146, 89–95. [Google Scholar] [CrossRef]
- Jung, W. Mid-Frequency Local Active Control of Road Noise. Ph.D. Thesis, University of Southampton, Southampton, UK, 2018. [Google Scholar]
- Cheer, J.; Elliot, S.J. Active noise control of a diesel generator in a luxury yacht. Appl. Acoust. 2016, 105, 209–214. [Google Scholar] [CrossRef] [Green Version]
- Bai, M.R.; Lin, Y.; Lai, J. Reduction of electronic delay in active noise control systems—A multirate signal processing approach. J. Acoust. Soc. Am. 2002, 111, 916–924. [Google Scholar] [CrossRef] [PubMed]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, Z.; Zheng, X.; Zhou, Q.; Hao, Z.; Qiu, Y. A Hybrid Active Noise Control System for the Attenuation of Road Noise Inside a Vehicle Cabin. Sensors 2020, 20, 7190. https://doi.org/10.3390/s20247190
Jia Z, Zheng X, Zhou Q, Hao Z, Qiu Y. A Hybrid Active Noise Control System for the Attenuation of Road Noise Inside a Vehicle Cabin. Sensors. 2020; 20(24):7190. https://doi.org/10.3390/s20247190
Chicago/Turabian StyleJia, Zibin, Xu Zheng, Quan Zhou, Zhiyong Hao, and Yi Qiu. 2020. "A Hybrid Active Noise Control System for the Attenuation of Road Noise Inside a Vehicle Cabin" Sensors 20, no. 24: 7190. https://doi.org/10.3390/s20247190
APA StyleJia, Z., Zheng, X., Zhou, Q., Hao, Z., & Qiu, Y. (2020). A Hybrid Active Noise Control System for the Attenuation of Road Noise Inside a Vehicle Cabin. Sensors, 20(24), 7190. https://doi.org/10.3390/s20247190