1. Introduction
Non-Destructive Testing (NDT) techniques are widely used for the inspection of different structures in numerous industrial applications. Guided Waves (GWs) are among these techniques and they are widely used in different applications such as the inspection of pipes [
1,
2], rails [
3,
4] and plates [
5,
6]. GWs in plates and pipes are complex as they are generally dispersive, although some modes, such as the SH0 mode in a plate and the T(0,1) mode in a pipe, can be non-dispersive. Their characteristics are affected by the material properties and the geometry of the structure within which the elastic wave is propagating. GW inspection is a long-range NDT technique, potentially allowing large areas to be inspected in situations where there is limited access [
7,
8], and has applications in the aerospace sector, for wing inspection, for example. Guided waves can be used to detect different types of defects in plate-like structures, including delaminations [
9,
10] in composites. The possibility of damage detection in aerospace composite has been investigated using both S0 and SH0 modes [
11]. The work in this paper concentrates on these two modes, although A0 modes can also be useful because of their smaller wavelength.
GWs can be generated using various transduction mechanisms such as piezoelectric transducers and Electro-Magnetic Acoustic Transducers (EMATs). The latter are attracting more industrial interest as they are contact-free transducers and do not need any couplant to operate on metal surfaces. The main transduction mechanism for EMATs is the Lorentz force, although magnetostriction can sometimes play a part, for example on corroded steel [
12,
13]. By reconfiguring the orientation of coils and applied static magnetic fields, they are able to generate and detect different types of guided wave modes [
14]. One of the major limitations of conventional EMATs is that the Lorentz force can only operate on conductive samples, and their efficiency is heavily affected by the material properties and lift-off [
15]. EMATs typically have a low efficiency when compared to piezoelectric transducers [
16,
17]. Air-coupled ultrasound is another non-contact technique that can be used for either through-transmission or GW operation [
18], although control of alignment can be an issue for GW work. Note that pulse compression processing or other signal processing methods are often required to improve signal to noise ratios [
19].
To deal with the efficiency of EMATs, and to overcome some of the limitations of air-coupled systems, this paper investigates the use of removable magnetostrictive patches that are attached to the surface of the specimen. While magnetostrictive patch transducers (MPTs) have been reported in the literature [
17,
20], this paper extends the knowledge in this area by systematically studying the variables that affect their operation, and also studies the properties of the resulting GW generation. The removable concept was to allow these MPTs to operate at surfaces on which a more permanent adhesive could not be used. An example is for aircraft wing inspection, where operators would not allow a strong adhesive, which might damage the surface in any way, to be used.
Magnetostriction can be defined as the change in the dimensions of a sample when an external magnetic field is applied. It was first discovered by Joule [
21], and occurs when an external magnetic field is applied to a ferromagnetic material [
22,
23,
24]. The magnetostrictive coefficient is usually written as
λ, and is defined as the ratio of the ratio of the fractional change in length δ
l over the initial length
l0In the absence of an applied magnetic field, the different magnetic domains are orientated in such a way as to minimise the total magnetization of the sample [
25]. If a sufficiently strong external magnetic field is applied to the sample in one of these directions, the magnetic dipole moments tend to align with the applied field, but in doing so they induce strain into the lattice. The degree of strain induced depends on the specific sample properties, including material composition and microstructure [
26]. When an external magnetic field is applied, the change in dimensions that occurs is known as the Joule effect; conversely, when an external strain is applied, the change in magnetization is known as the Villari effect [
24,
27,
28,
29,
30,
31]. There is a non-linear relationship between the applied field (
H) and
λ, as illustrated in
Figure 1 for an iron–cobalt alloy. In practice, it is preferable to ensure that the link between the external applied magnetic field and the generated strain through magnetostriction is optimised by operating around the steepest part of the strain-applied field curve, and it is also helpful that, in this region of the curve, the response is approximately linear. The static magnetic biasing field
Hs is selected so the generated strain is created at some bias point (I), such as that shown in
Figure 1. The applied dynamic field (
Hd) then causes the resultant change in dimensions.
When a dynamic magnetic field is applied, the
λ–
H curve causes linear oscillation around the bias point, providing the highest strain change for a given field change. The process of selecting the biasing magnetic field and the oscillating dynamic field is of importance, as a linear response is required when magnetostrictive patch transducers are used to generate guided waves [
29,
32]. This is because a non-linear response can induce harmonic frequencies of the main drive frequency, making it more difficult to selectively generate a particular guided wave mode. The idea behind choosing the bias point in the position shown is that the largest variation in strain is obtained for the minimum applied dynamic magnetic field, as this is the region of both greatest slope as well as of optimum linearity. Magnetostriction has been used in this way by various authors for ultrasonic generation in a range of materials—see, for example, [
33,
34,
35,
36,
37,
38].
Magnetostrictive Patch Transducers (MPTs) [
32] can be used in different shapes and forms for different applications. For example, omnidirectional MPTs have been developed, which use a cylindrical permanent magnet placed on top of a circular coil [
20]. Directional patches have also been developed with a U-shape permanent magnet placed on top of a meander coil [
39]. These designs were able to generate different wave modes, but a detailed understanding of the generation mechanisms was not reported. In this paper, various combinations (directions, amplitude, etc.) of static and dynamic magnetic fields have been studied, so as to determine the mechanisms that influence operation of the magnetostrictive patch, and hence which arrangement is optimum for a particular guided wave mode. One example is in the likely magnitude and direction of the forces in an MPT that might result from combinations of different coil geometries and static magnetic field directions. Note that both Lorentz and magnetostrictive forces will be generated in our experiments. The Lorentz force acts on electrons, whereas the physical origin of the magnetostriction is the magnetization–strain coupling caused by the quantum spin–orbit interaction. The magnitude and direction of each will influence the directional characteristics and relative generation efficiency of SH0, S0 and A0 modes. This is studied in this paper, which gives an understanding of how different static and dynamic magnetic field directions with respect to the removable patch on the surface of a flat plate can affect the generation of different guided wave modes.
While MPTs have been reported previously in the literature, earlier papers did not present detailed characteristics such as guided wave directivity patterns for different configurations of both dynamic and magnetic fields. The work described in this paper provides experimental measurements of the characteristics of guided waves when generated by a removable magnetostrictive patch. This is studied for various conditions of coil and magnet geometries, including one where the contribution from the Lorentz mechanism is minimised by careful choice of the orientation of dynamic and static magnetic fields.
2. Experimental Setup
Two sets of experiments were performed. The first was to study vibrational patterns directly underneath the removable patches, while the second measured the directivity patterns of SH, S0 and A0 modes at some distance from the patch.
2.1. Vibrational Modes Directly under the Patch
These initial experiments were designed to investigate the vibrational characteristics of the region within a 3 mm thick glass plate that was directly below a thin magnetostrictive patch when subject to different dynamic and static magnetic fields. The patch was adhered to the plate surface using a thin layer of double-sided tape and could be removed after a particular measurement without damaging the surface of the sample. These first experiments were conducted using a glass plate, as this was known to be isotropic and non-conducting and have low acoustic attenuation properties over the frequency range of interest. The lack of electrical conductivity was felt to be important, as the presence of conductivity might have affected the Lorentz forces that would also be generated within the MPTs in some configurations.
A schematic diagram of the experimental configuration used for this type of measurement is presented in
Figure 2. The magnetostrictive patch was a VACOFLUX 48 iron cobalt alloy (
®VACUUMSCHMELZE GmbH & Co., Hanau, Germany) with a saturation magnetization of 2.35 T and high permeability value of up to 18,000 N A
−2. The mechanical and magnetic properties of the VACOFLUX iron-cobalt alloy are given in
Table 1.
An 80 × 80 mm square patch of 55 µm thickness was attached at the centre of the glass plate of dimensions 200 × 200 mm. On the other side of the glass plate, and directly under the patch, a reflective tape was attached in order to reflect light back to a vibrometer, used to detect the vibrations of ultrasonic waves that existed directly under the MPT. A PSV-400 3D vibrometer laser scanner within the vibrometer setup was placed parallel to the glass plate at a distance of 1.2 m. The laser head is constructed with three laser beams within a single vibrometer head. They detect vibrations both in-plane and out-of-plane. Each beam is responsible for measuring the vibration in a different direction (X, Y and Z). The distance was selected in order to obtain an optimal reading from the laser beam while keeping a good scanning resolution. The scanning heads of the PSV-400 system were positioned so as to directly observe the vibrations of the patch after excitation.
In order to stimulate the magnetostrictive patch to generate GWs, either a racetrack coil or a pancake coil were connected to a high-power pulsing unit. The current waveform that was input to the racetrack coil consisted of a one-cycle sine wave of 120 kHz central frequency (
Figure 3). The operation frequency of 120 kHz was chosen initially due to the need to ensure that the frequency response was well within the higher frequency limit available from the magnetostrictive material. In order to capture the key results, the patches were scanned and two specific time steps. The first dataset was captured when the excitation signal from the pulsing unit and passing through the coil reached its peak—this was to capture the vibration on the patch while minimising any side vibration or electrical pick-up. Data were also collected at a later time, close to the end of the excitation waveform.
The coil generating the dynamic magnetic field within the magnetostrictive patch transducer was constructed in one of two configurations, each with a permanent magnet to generate the static magnetic field (
Bs) and a coil to provide the dynamic magnetic field (
Bd). The racetrack coil shown in
Figure 4a,
Bs was generated using a U-shape alnico permanent magnet (
Figure 4b) in order to ensure that the field was directed in-plane with regards to the patch, i.e., parallel to the plate surface. This permanent magnet was placed so that the field was located at the linear region of a racetrack coil, used to generate the dynamic magnetic field. The racetrack coil consisted of 10 turns, of a 1 mm wide wire with a 0.5 mm spacing between each turn (
Figure 4a). A circular pancake coil geometry was also used (
Figure 4c), in conjunction with both the horseshoe magnet described above, but also with a cylindrical permanent magnet that generated a static field perpendicular to the plane of the coil. The alnico grade 5 U-shape permanent magnet (
Figure 4b) had a remanent magnetic field equal to 1.1 T. The generated permanent magnetic field was measured to be 210 mT in air at the mid-point between the poles of the U-shape magnet, but of course the magnetic flux density would be higher in the patch when it was located between the poles. The cylindrical magnet provided an out-of-plane biasing magnetic field (i.e., perpendicular to the sample surface), and had a remanent magnetic field equal to 1.3 T. The measured generated field at the flat surface of the cylindrical permanent magnet in air was equal to 300 mT.
The main aim of these experiments was to determine the patch vibrational modes for different coil geometries and magnetic field directions. For this reason, a set of four main configurations were studied, and these are presented in
Table 2.
The four configurations are illustrated more fully in
Figure 5. As shown earlier in
Figure 2, the X–Y plane contained the plate sample and the patch, with the
Z-axis being perpendicular to the plate. The configurations were designed to allow a study of the relative interactions between the directions of both
Bs (generated by the magnet) and
Bd (generated by the coil) for two coil geometries. Note that this was likely to be very different from a standard EMAT using Lorentz forces only, as a substantial magnetostrictive component would be expected, whose magnitude and direction of operation had to be determined. For these reasons, Configurations 1 and 2 have two measurements where the coils/magnet orientation was fixed, but where the whole arrangement could be rotated by 90° with respect to the patch. This would identify any directional effects or anisotropy caused by the patch itself.
Configuration 3 had an out-of-plane Bs but with the pancake coil in-plane; this configuration would thus be expected to generate both Lorentz and magnetostrictive forces, which would act radially. Conversely, Configuration 4 used an in-plane magnetic field, which would be expected to create a more complicated set of forces normal to the patch via Lorentz forces, as shown.
2.2. Guided Wave Mode Generation
The second set of experiments investigated the signals that would be generated by the magnetostrictive patch attached to a metallic sample. The experimental arrangement is shown in
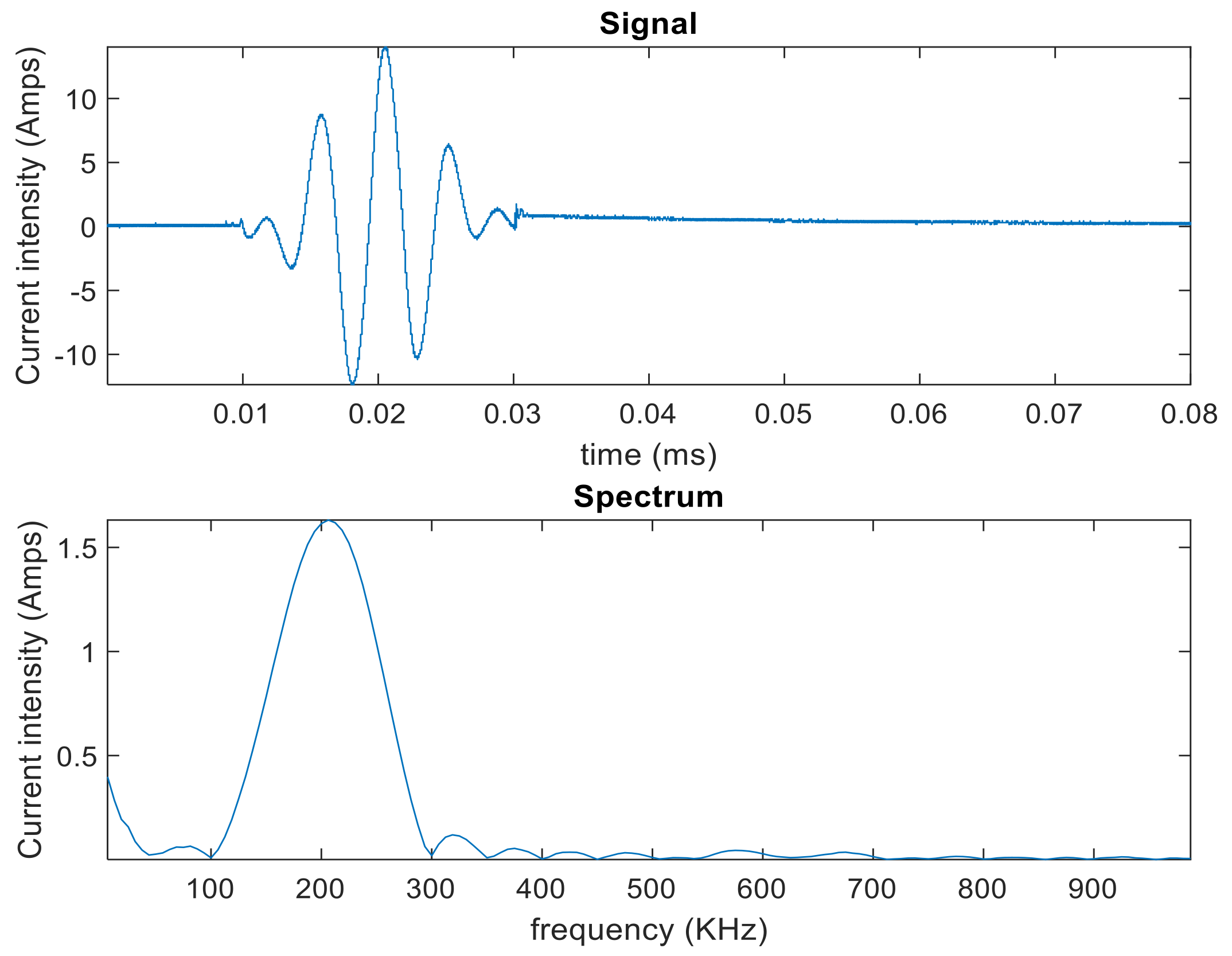
Figure 6. In this case, the input was a windowed three-cycle excitation at a 200 kHz central frequency generated by using a RITEC RAM5000 unit. The frequency and the number of cycles were different from the previous experiment set, in order to enhance the signal reading and the signal-to-noise ratio. This combination of frequency/number of cycles allowed a clearer received signal containing S0, SH0 and A0 modes, and allowed a more accurate measurement of the time of flight and, hence, phase velocity of each mode. A higher frequency of 200 kHz was also used for guided-wave generation in the metallic plate, as this would more closely resemble the frequencies that might be used in an NDE experiment. The data-capturing window was 400 µs long. An initial delay of 10 µs to the pulsed signal to be generated through the RITEC system was imposed. The coil impedance was measured using an impedance analyser in order to calculate the root mean squared amplitude of the alternating current driving the coil, which was 15 A. The signal and the magnitude Fast-Fourier transform (FFT) are presented in
Figure 7.
The magnetostrictive patch was attached to a 3 mm thick, non-magnetic metallic plate for these guided-wave propagation experiments. The size of the square iron cobalt alloy patch was 76 × 76 mm
2, and the patch thickness was 55 µm. In these experiments, the coil was a racetrack printed circuit coil of 0.035 mm thickness. The printed coil was insulated from the magnetostrictive patch using a 0.1 mm thick adhesive plastic film. The width of the single track of racetrack coil was 1 mm and the spacing between tracks was equal to 0.5 mm. The coil was formed of 10 turns and it was printed on a single layer of the printed circuit board (PCB). The full coil track width was 14.5 mm, and the PCB substrate was 1.57 mm thick. The permanent magnet was placed on the straight region of the racetrack coil, as previously shown in
Figure 5. The design and the dimensions were chosen so that the width of the racetrack coil at its linear portion would be smaller than that of the patch in order to avoid any interaction between the electromagnetic fields and the patch edges.
For this set of experiments, the detection system consisted of a 3D laser vibrometer mounted on a three-axis arm. The laser head contained three laser beams. The beams are separate 3 Doppler vibrometers providing measurement in the three-axis system for the back scattered light. The optical sensors with the different beams can detect and measure the vibration in the in-plane and the out-of-plane directions. The motion of the laser beam was designed to perform a 360° rotational motion with a 10° angle step so as to capture the waveforms at different angles. The laser beam head was positioned as shown in
Figure 8 at a distance of 350 mm from the centre of the patch. The laser system measured the three components of the travelling guided waves in the X, Y and Z directions, with the laser beam normal to the metal plate surface. The fixed distance of the laser vibrometer at various angle to the patch was controlled by the three-axis arm.
Different configurations for the static and dynamic magnetic fields acting on the patch were tested. As before,
Table 1 summarizes the different configurations and their orientations with regards the laser vibrometer. This was performed for both racetrack and pancake coil shapes. In Configurations 1, 2 and 4, two measurements ((a) and (b)) were taken with the same coil/magnetic field arrangement but rotated by 90° with respect to the patch. This was to determine the presence of any anisotropy/directional effects within the patch itself. It should be noted that multiple measurements of the same directivity pattern showed good repeatability, with a relatively low error for each measurement point.
4. Discussion
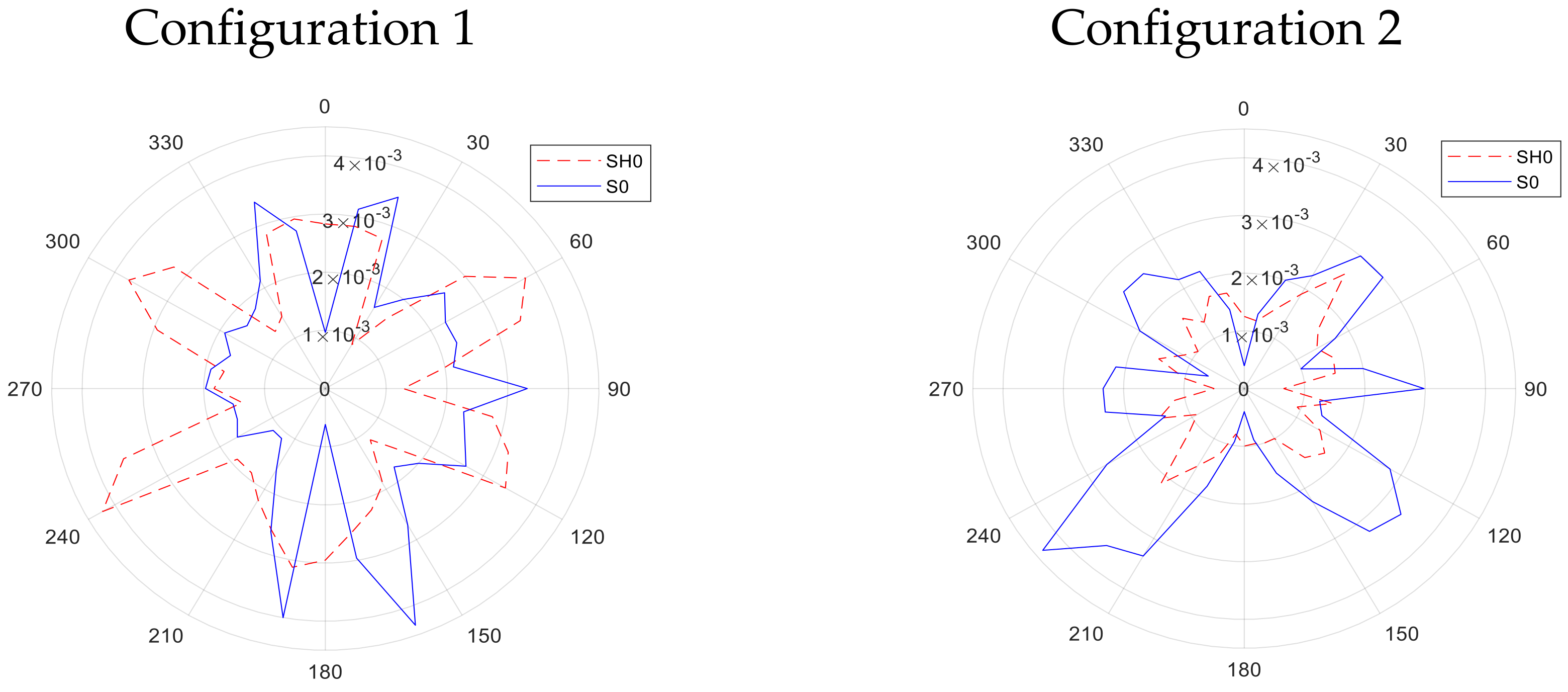
It is evident that some interesting interactions are taking place within the magnetostrictive patch when attached to a plate. Configuration 1 created orthogonal Bs and Bd fields in the X-Y plane. With no Lorentz force expected, the motion of the patch would be due to magnetostriction effects only. The result was an initial asymmetric wave motion, visualised over the patch, which then led to a complicated directivity pattern for both S0 and SH0 modes. In contrast to this, the A0 mode directivity contained prominent lobes along the 35°–215° and 320°–140° axes. Configuration 1 shows that using magnetostriction forces only to generate guided waves is a complex phenomenon. A full understanding of the underlying complex generation mechanisms at work is outside the scope of this experimental study, and would require modelling of both the interaction between static and dynamic fields and the subsequent guide wave generation from the resultant induced stresses on a particular sample.
Configuration 2 also led to a complicated S0 and SH0 behaviour. However, this configuration could be used to optimise A0 mode generation, while noting that observed amplitudes were smaller than those of the SH0 and S0 modes, whose arrivals can still be observed on waveforms (see
Figure 16b). The A0 was generated with bipolar directivity lobes centred along the 90°–270° axis, which was also the direction of both the static and dynamic magnetic fields. Note that rotation of the coil/magnet arrangement relative to the stationary patch would allow the A0 mode to swept at different directions across a plate, making it a convenient method for scanning and defect detection purposes.
In Configuration 3, both Lorentz and magnetostrictive forces were generated in the XY plane. The radiation patterns of A0, S0 and SH0 are all fairly uniform across all angles, as would be expected from the cylindrical geometry of the excitation fields.
Configuration 4 demonstrated that magnetostrictive effects led to a dominant SH0 mode in the expected X direction (0°) direction, due to the orientation of the static field Bs. Thus, this configuration could be used if this mode only is of interest in a particular direction. The A0 mode was generated with a fairly low amplitude and this is due the fact that the A0 mode requires some component of out-of-plane motion (i.e., in the Z direction) which was not favoured in this configuration. The Lorentz forces in theory would be minimal in the 0° and 180° and start to gradually increase toward the 90° and 270°. This can be observed through the polar radiation of the A0 mode, where it is minimal in 0° and 180°.
It should be noted that the measurements were taken using the laser system around 360° without interpolation between measurement points. Note also that the directivity patterns measured for different wave modes in
Figure 14 and
Figure 15 show some planes of symmetry, as might be expected, indicating that the directivity patterns were measured in a robust manner.
5. Conclusions
The use of a vibrometer detector has been shown to allow the characteristics of guided waves generated by removable magnetostrictive patches to be measured for the first time, and some interesting phenomena were observed. It has been demonstrated that these devices can be used to generate S0-, A0- and SH0-guided wave modes with the provision of control capability in terms of directivity and relative amplitude of the three GW modes investigated. The relative amplitude and direction of each of these modes can be altered by changing the dynamic and static magnetic field distributions within the patch, and this has been achieved by using different combinations of dynamic coil shapes and static magnetic field directions. It is evident from the data that there is a complicated interaction between the relative directions of static and magnetic fields and the patch, and that this arises because both Lorentz and magnetostriction forces could be generated, depending on the exact geometry chosen. This interaction is obviously complex, and hence careful selection of the direction of the dynamic and static magnetic fields should be adopted in order to favour specific modes compared to others. A fuller understanding and modelling of the generation mechanisms, and their effect on the resultant guided wave mode properties, is the subject of current research. However, such transducers are likely to find applications in many areas where ultrasonic guided waves are useful, especially in non-destructive evaluation measurements. The ability to adjust the excitation conditions so as to change both the guided wave directivity and the dominant mode for a given patch, simply by changing the magnetic field conditions, will provide great flexibility in such measurements.
The work reported in this paper shows that by adopting such an approach, a particular guided wave mode can be generated in a particular direction with the optimum signal level. This is of advantage in certain measurements where a particular mode is required (e.g., the SH0 mode at 0° for configuration 4). Conversely, configuration 3 provides a fairly uniform radiation pattern for both the S0 and SH0 modes. Once the patch has been attached to the surface, the amplitude of each of the three modes can be adjusted simply by altering the coil and/or magnet geometry, giving great flexibility—a different patch need not be used on the surface. It was shown that the A0 mode is the least favoured by the technique, due to the fact that it requires a large out-of-plane component to be generated efficiently.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}