Feasibility of Discriminating UAV Propellers Noise from Distress Signals to Locate People in Enclosed Environments Using MEMS Microphone Arrays

 ,
,  , ,
, ,
Abstract
:1. Introduction
- There is no sensor network installed, or is not operational.
- There is an emergency caused by a fire or an explosion with dense smoke.
- Anonymous people to be located, not knowing their identity a priori.
2. Materials and Methods
2.1. Drone
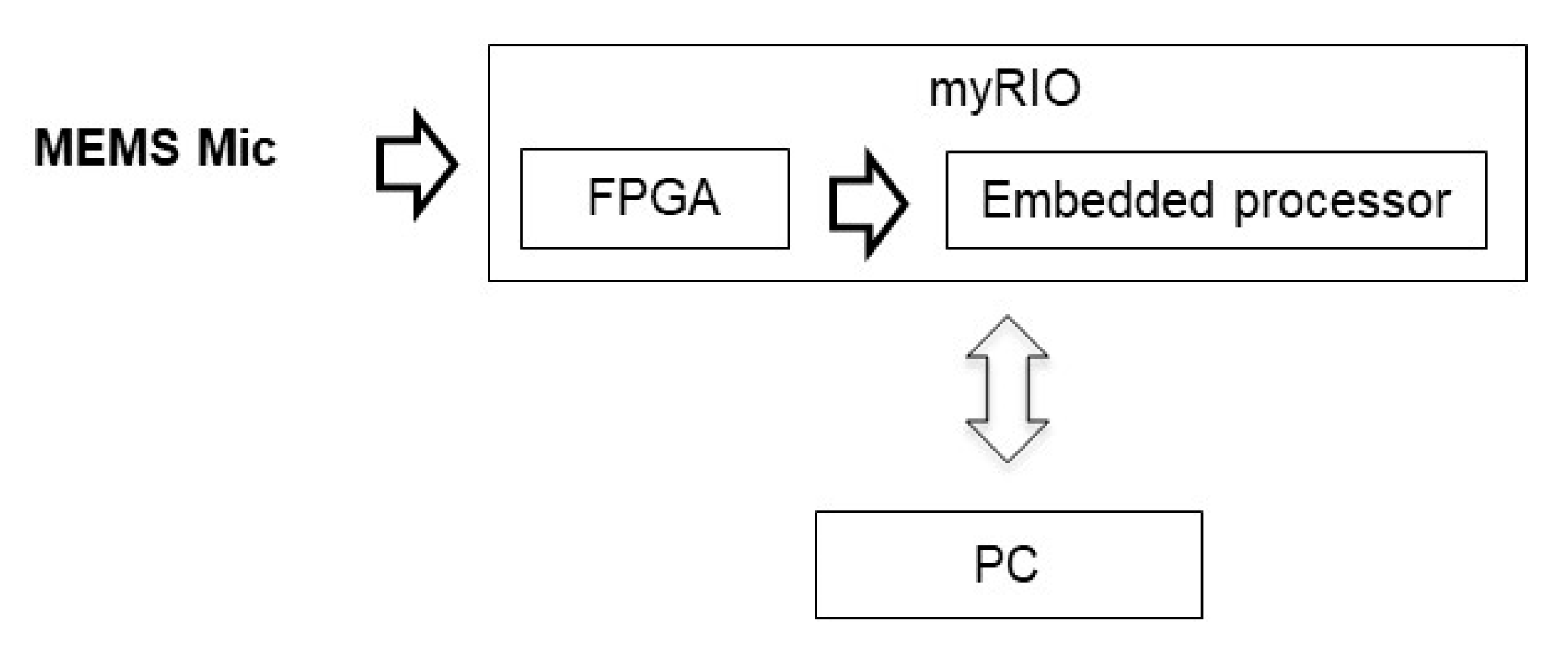
2.2. Acoustic System Based on MEMS Array and a myRIO Platform
- In the acquisition block, each MEMS microphone performs signal acquisition with a 1-bit sigma-delta AD converter working at high speed (sample frequency of 2 million Samples per second).
- In the signal processing block, several routines are implemented: first the data from MEMS microphone are deinterlaced and then they are decimated obtaining 64 independent signals with a sampled rate of 50 kHz (one from each MEMS of the array). Finally, each signal is filtered with a high-pass filter in order to eliminate the low-frequency noise from the drone propellers or other sources like environmental noise or fire that have a low-frequency spectrum.
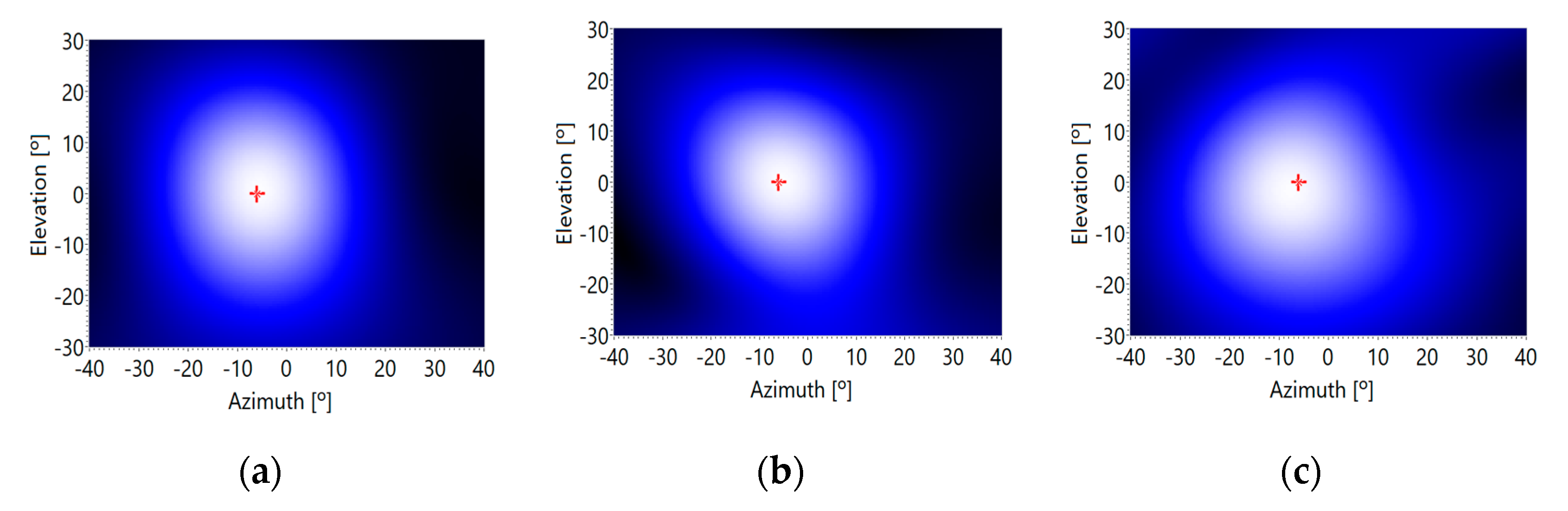
- The DOA block estimates the angles of arrival of direct and reflected signals. First, an acoustic image is obtained representing the sound pressure level (SPL) received for a set of NxN arrival directions in azimuth and elevation. From this acoustic image the angular coordinates of the local maximums are extracted, which are the arrival angles of the direct and reflected signals. The acoustic image is obtained by a deterministic wideband beamforming algorithm [23,24,25]. This algorithm can be considered as a spatial filter to estimate the sound pressure level (SPL) for a given direction of arrival.
2.3. Acoustic Localization Using the Direction of Arrival in an Enclosed Environment
3. Results
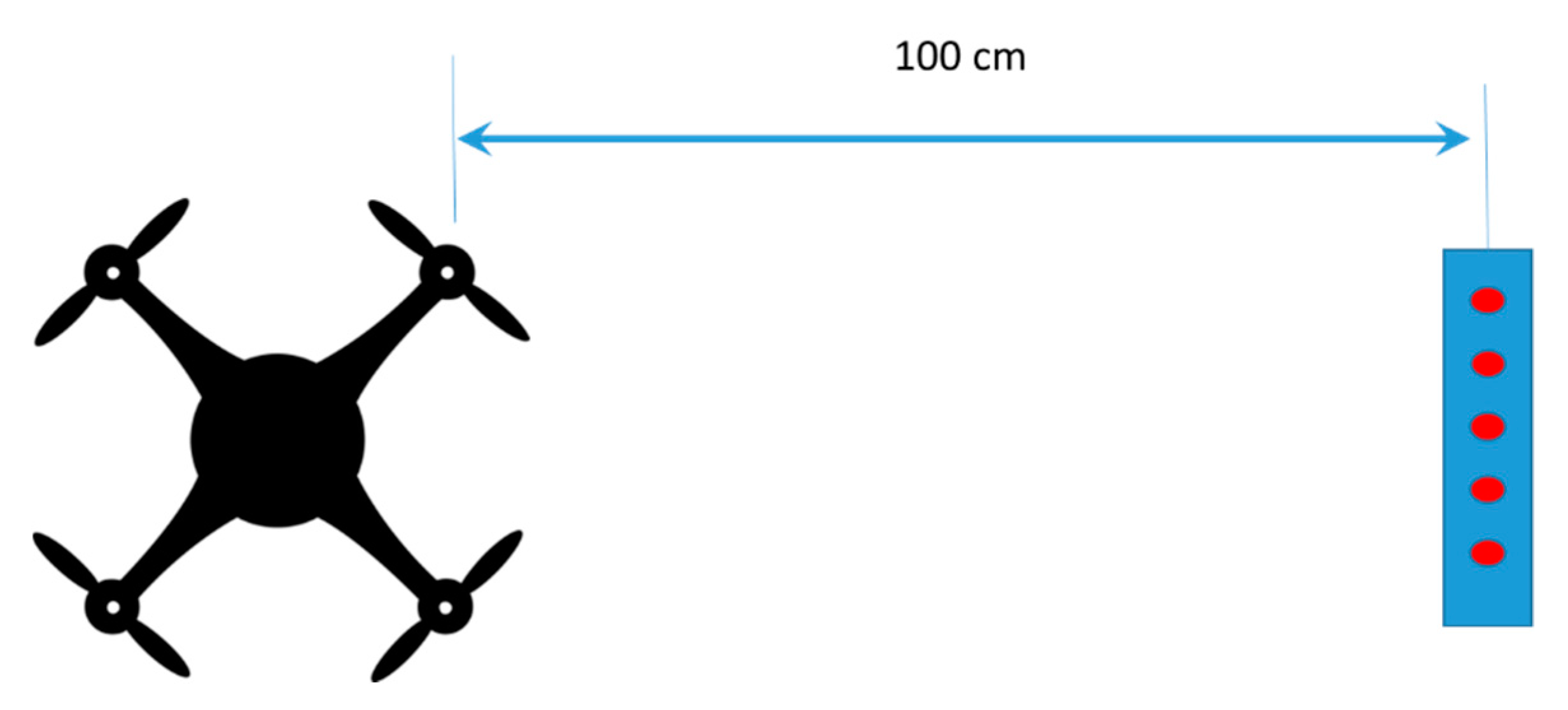
- Setup 1: In this setup, the drone is anchored to a horizontal surface and the 2D array is placed at 100 cm. This distance is the same that have been used to measure the background noise levels with a sound level meter. This setup allows the characterization of the noise generated by the four propellers of the drone.
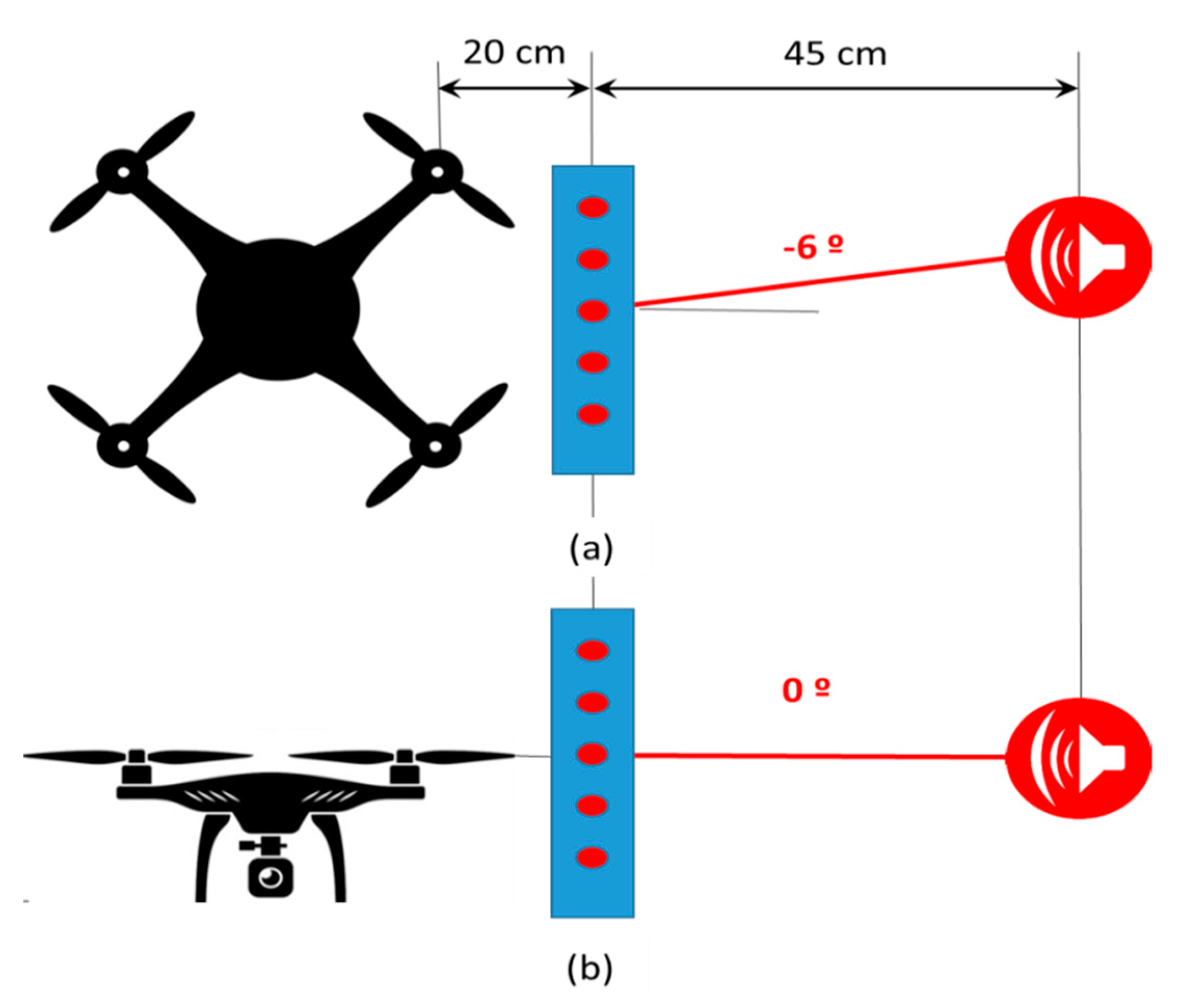
- Setup 2: In this case, the 2D array is placed at 20 cm from the drone, in order to be as close as possible to it. In this setup, the emitting source is placed at 45 cm, which is the minimum distance that the drone could approach the person, because of its physical dimensions. This second setup allows the estimation of the DOA of a nearby emission source.
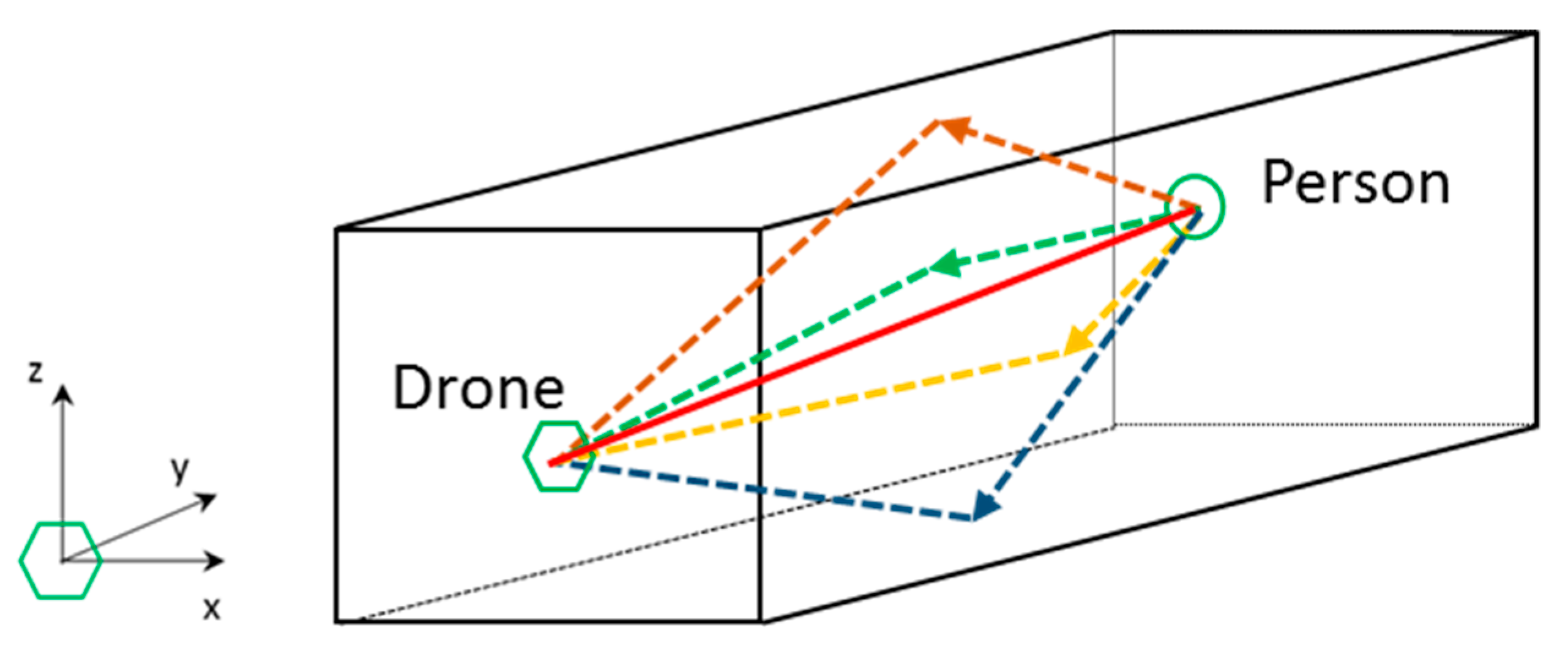
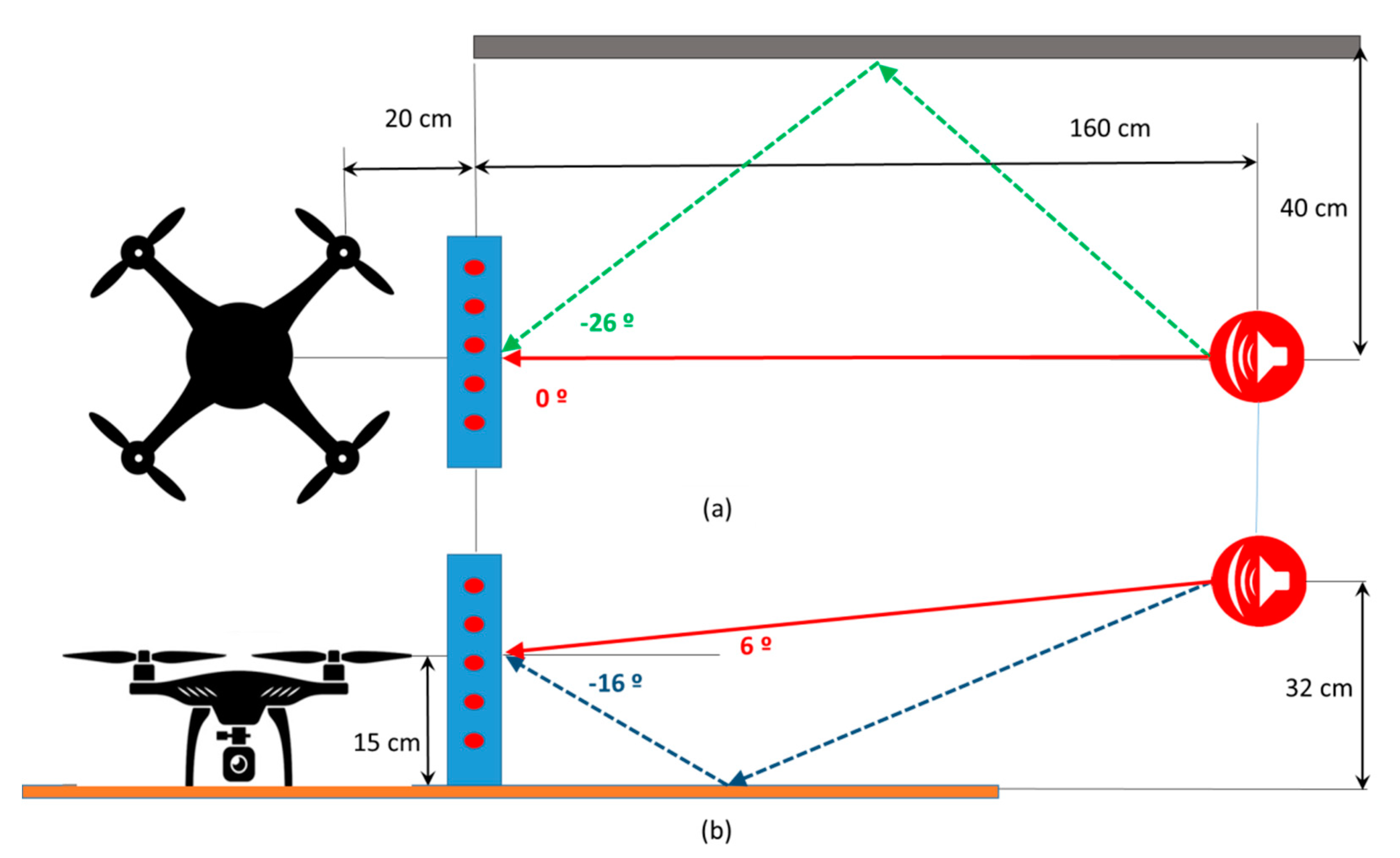
- Setup 3: In this case, the emitting source has been placed at 160 cm from the 2D array. This setup also adds one horizontal surface and one vertical one, in order to reflect the emitted acoustic signal mention before. The distance between the array and the sound source has been defined on the basis of the physical dimensions of the test area and the size and position of the employed reflective surfaces. This last setup allows the estimation of the DOAs of the direct signal and the reflections, of this direct signal, on a horizontal plane and on a vertical plane.
- The acoustic signals to be detected. Two different acoustic sources have been used in this work:
- A sinusoidal pulsed signal.
- A continuous voice signal from a radio newscaster.
- The background noise, which in this case is the noise generated by the drone, which is produced by its four propellers. For the tests carried out, three background noise levels have been identified taking into account the different situations of the drone:
- Minimum: When the drone is on a stationary situation (hovering).
- Medium: When the drone describes slow horizontal movements.
- Maximum: When the drone describes fast movements or it is taking off, that is moving vertically.
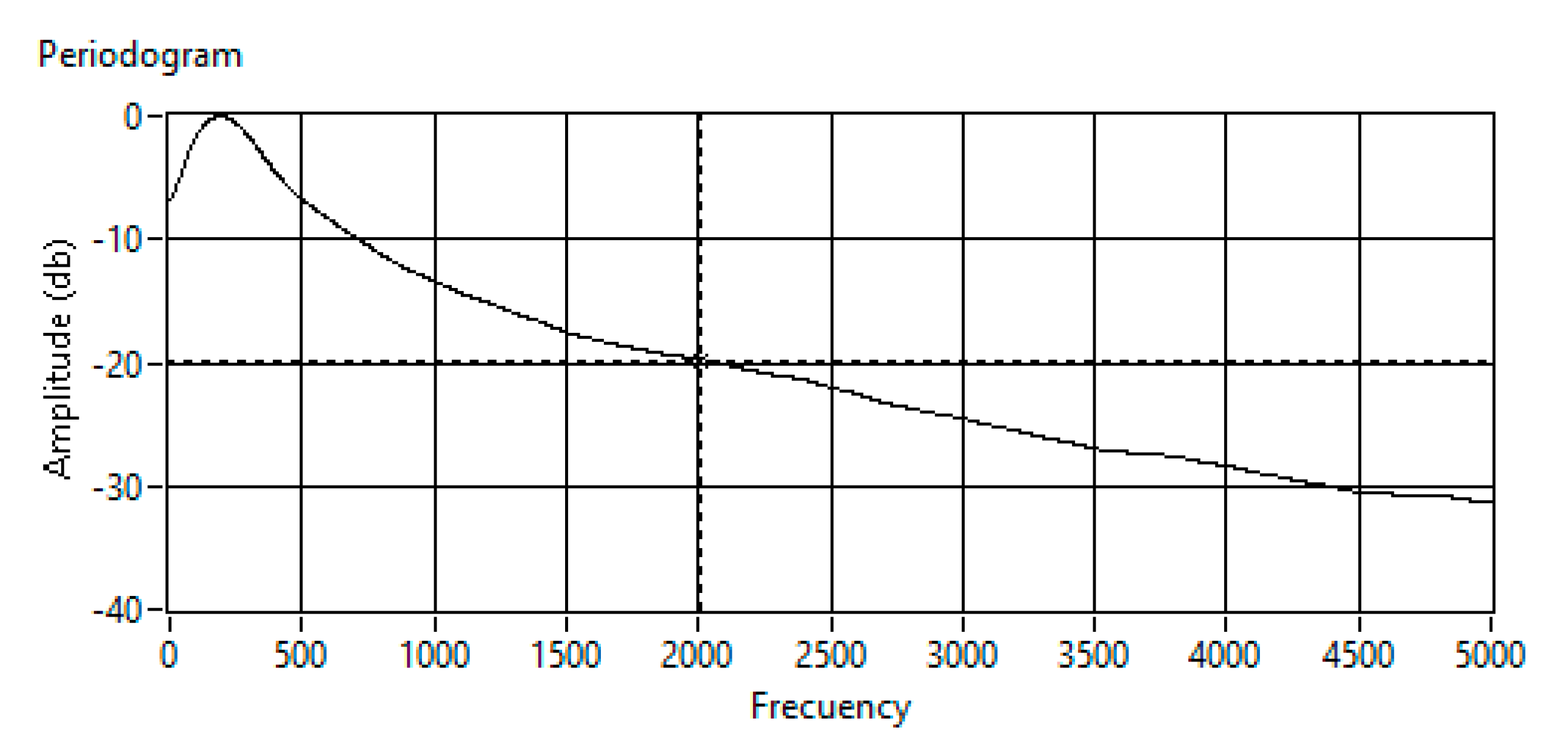
3.1. Frequency Analysis of the Noise Generated by the Drone Propellers
3.2. Estimation of the Angle of Arrival for a Tone Pulsed with the Drone’s Noise
3.3. Estimation of the Angle of Arrival for a Tone Pulsed with the Drone’s Noise and Two Reflective Surfaces
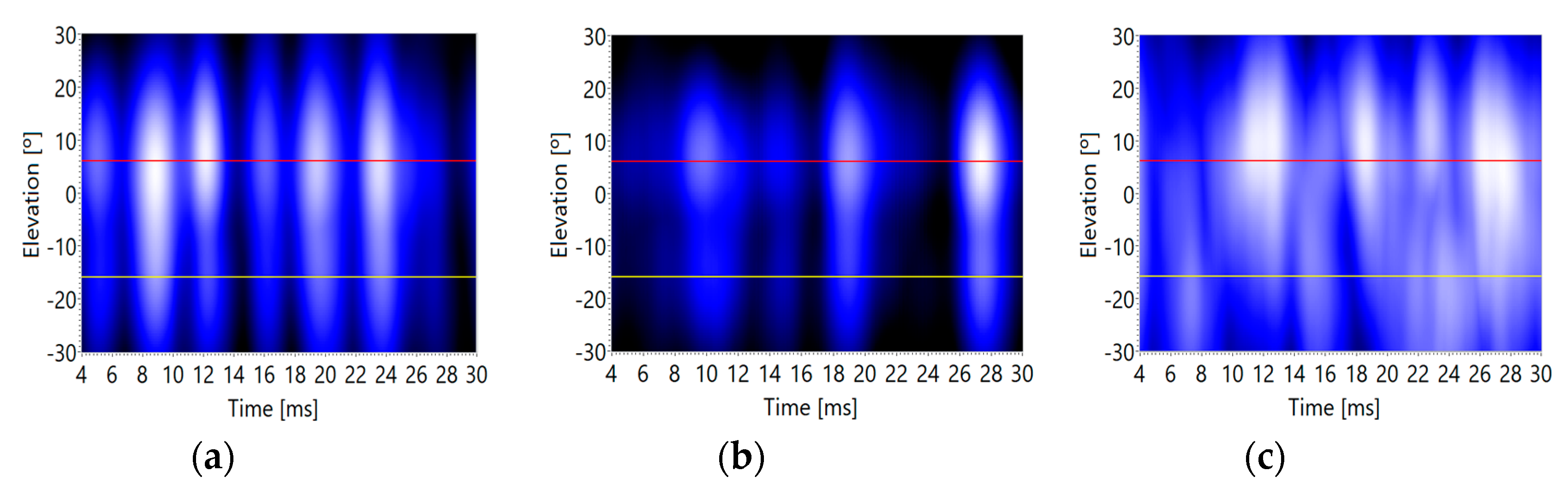
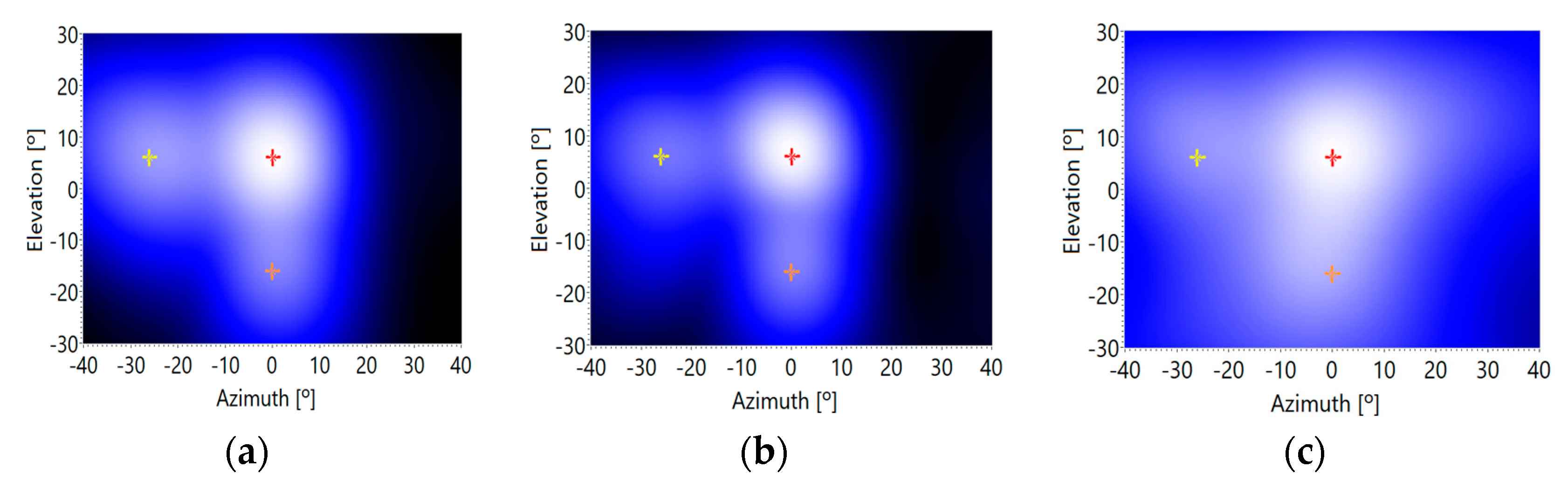
3.4. Estimation of the Angle of Arrival for a Distress Signal with the Drone’s Noise and Two Reflective Surfaces
3.5. Discussion
- Acoustically isolation of the MEMS array from the noise generated by the propellers that will typically come from the back of the array.
- Sequentially, keeping the drone in stationary flight, in order to minimize the noise generated, and thus to allow an accurate estimation of the angular coordinates of the direct and reflected distress signals.
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- People Tracking: 15 Technologies in 2018. Available online: https://behavioranalyticsretail.com/technologies-tracking-people/ (accessed on 24 January 2019).
- Zhang, D.; Xia, F.; Yang, Z.; Yao, L.; Zhao, W. Localization Technologies for Indoor Human Tracking. In Proceedings of the 5th International Conference on Future Information Technology, Busan, Korea, 21–23 May 2010; pp. 1–6. [Google Scholar]
- Rudol, P.; Doherty, P. Human Body Detection and Geolocalization for UAV Search and Rescue Missions Using Color and Thermal Imagery. In Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; pp. 1–8. [Google Scholar]
- Susperregi, L.; Sierra, B.; Castrillón, M.; Lorenzo, J.; Martínez-Otzeta, J.M.; Lazcano, E. On the Use of a Low-Cost Thermal Sensor to Improve Kinect People Detection in a Mobile Robot. Sensors 2013, 13, 14687–14713. [Google Scholar] [CrossRef]
- Choi, W.; Pantofaru, C.; Savarese, S. Detecting and tracking people using an RGB-D camera via multiple detector fusion. In Proceedings of the 2011 IEEE International Conference on Computer Vision (ICCV) Workshops, Barcelona, Spain, 6–13 November 2011; pp. 1076–1083. [Google Scholar]
- Dong, P.; Chen, Q. LiDAR Remote Sensing and Applications; Remote Sensing Applications Series; CRC Press: Boca Ratón, FA, USA, 2017. [Google Scholar]
- Wen, J.; Qian, C.; Tang, J.; Liu, H.; Ye, W.; Fan, X. 2D LiDAR SLAM Back-End Optimization with Control Network Constraint for Mobile Mapping. Sensors 2018, 18, 3668. [Google Scholar] [CrossRef] [Green Version]
- Taylor, J.; Kardo-Syssoev, A.; Mohamed, N.; Flores, B.; McEwan, T.; Narayanan, R.; Gill, G.; Ulander, L.; Germond, A.L.; Hellsten, H.; et al. Ultra-Wideband Radar Technology; CRC Press: Boca Raton, FA, USA, 2000. [Google Scholar]
- Kim, Y.; Ha, S.; Kwon, J. Human Detection Using Doppler Radar Based on Physical Characteristics of Targets. IEEE Geosci. Remote Sens. Lett. 2015, 12, 289–293. [Google Scholar] [CrossRef]
- Chang, P.S.; Ning, A.; Lambert, M.G.; Haas, W.J. Acoustic Source Location Using a Microphone Array. Patent No. US 6,469,732 B1, 22 November 2002. [Google Scholar]
- Velasco, J.; Pizarro, D.; Macias-Guarasa, J. Source Localization with Acoustic Sensor Arrays Using Generative Model Based Fitting with Sparse Constraints. Sensors 2012, 12, 13781–13812. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hahnel, D.; Burgard, W.; Fox, D.; Fishkin, K.; Philipose, M. Mapping and localization with RFID technology. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 04), Barcelona, Spain, 18–22 April 2004; pp. 1015–1020. [Google Scholar]
- Mi, J.; Takahashi, Y. Design of an HF-Band RFID System with Multiple Readers and Passive Tags for Indoor Mobile Robot Self-Localization. Sensors 2016, 16, 1200. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van der Spek, S.; Van Schaick, J.; De Bois, P.; De Haan, R. Sensing Human Activity: GPS Tracking. Sensors 2009, 9, 3033–3055. [Google Scholar] [CrossRef] [PubMed]
- Bajaj, R.; Ranaweera, S.L.; Agrawal, D.P. GPS: Location-tracking technology. Computer 2002, 35, 92–94. [Google Scholar] [CrossRef]
- Al Rashed, M.A.; Oumar, O.A.; Singh, D. A real time GSM/GPS based tracking system based on GSM mobile phone. In Proceedings of the Second International Conference on Future Generation Communication Technologies (FGCT 2013), London, UK, 12–14 November 2013. [Google Scholar]
- Hellebrandt, M.; Mathar, R. Location tracking of mobiles in cellular radio networks. IEEE Trans. Veh. Technol. 1999, 48, 1558–1562. [Google Scholar] [CrossRef] [Green Version]
- Tassetto, D.; Fazli, E.H.; Werner, M. A Novel Hybrid Algorithm for Passive Localization of Victims in Emergency Situations. In Proceedings of the 4th Advanced Satellite Mobile Systems, Bologna, Italy, 26–28 August 2008; pp. 320–327. [Google Scholar]
- Zuo, Z.; Liu, L.; Zhang, L.; Fang, Y. Indoor Positioning Based on Bluetooth Low-Energy Beacons Adopting Graph Optimization. Sensors 2018, 18, 3736. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baronti, P.; Barsocchi, P.; Chessa, S.; Mavilia, F.; Palumbo, F. Indoor Bluetooth Low Energy Dataset for Localization, Tracking, Occupancy, and Social Interaction. Sensors 2018, 18, 4462. [Google Scholar] [CrossRef] [Green Version]
- Sun, C.I.; Huang, J.T.; Weng, S.C.; Chien, M.F. City Marathon Active Timing System Using Bluetooth Low Energy Technology. Electronics 2019, 8, 252. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Hedley, M.; Bengston, K.; Johnson, M.; Humphrey, D.; Kajan, A.; Bhaskar, N. TDOA-based passive localization of standard WiFi devices. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018. [Google Scholar]
- Van Trees, H. Optimum Array Processing: Part IV of Detection, Estimation and Modulation Theory; John Wiley & Sons: New York, NY, USA, 2002. [Google Scholar]
- Van Veen, B.D.; Buckley, K.M. Beamforming: A Versatile Approach to Spatial Filtering. IEEE ASSP Mag. 1988, 5, 4–24. [Google Scholar] [CrossRef]
- Brandstein, M.; Ward, D. Microphone Arrays; Springer: New York, NY, USA, 2001. [Google Scholar]
- Beeby, S.; Ensell, G.; Kraft, K.; White, N. MEMS Mechanical Sensors; Artech House Publishers: Norwood, MA, USA, 2004. [Google Scholar]
- Scheeper, P.R.; van der Donk, A.G.H.; Olthuis, W.; Bergveld, P. A review of silicon microphones. Sens. Actuat. A Phys. 1994, 44, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Da Silva, B.; Segers, L.; Braeken, A.; Steenhaut, K.; Touhafi, A. Design Exploration and Performance Strategies towards Power-Efficient FPGA-Based Architectures for Sound Source Localization. J. Sens. 2019, 5761235, 1–27. [Google Scholar] [CrossRef]
- Izquierdo, A.; Villacorta, J.J.; Del Val Puente, L.; Suárez, L. Design and Evaluation of a Scalable and Reconfigurable Multi-Platform System for Acoustic Imaging. Sensors 2016, 16, 1671. [Google Scholar] [CrossRef] [Green Version]
- Fang, Z.; Yang, S.; Jain, S.; Dubey, G.; Roth, S.; Maeta, S.; Nuske, S.; Zhang, Y.; Scherer, S. Robust Autonomous Flight in Constrained and VisuallyDegraded Shipboard Environments. J. Field Robot 2017, 34, 25–52. [Google Scholar] [CrossRef]
- Chen, Y.; Tang, J.; Jiang, C.; Zhu, L.; Lehtomäki, M.; Kaartinen, H.; Kaijaluoto, R.; Wang, Y.; Hyyppä, Y.; Hyyppä, H.; et al. The Accuracy Comparison of Three Simultaneous Localization and Mapping (SLAM)-Based Indoor Mapping Technologies. Sensors 2018, 18, 3228. [Google Scholar] [CrossRef] [Green Version]
- López, E.; García, S.; Barea, R.; Bergasa, L.M.; Molinos, E.J.; Arroyo, R.; Romera, E.; Pardo, S. A Multi-Sensorial Simultaneous Localization and Mapping (SLAM) System for Low-Cost Micro Aerial Vehicles in GPS-Denied Environments. Sensors 2017, 17, 802. [Google Scholar] [CrossRef]
- Chen, C.; Yang, B.; Song, S.; Tian, M.; Li, J.; Dai, W.; Fang, L. Calibrate Multiple Consumer RGB-D Cameras for Low-Cost and Efficient 3D Indoor Mapping. Remote Sens. 2018, 10, 328. [Google Scholar] [CrossRef] [Green Version]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-time single camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 6, 1052–1067. [Google Scholar] [CrossRef] [Green Version]
- Case, E.E.; Zelnio, A.M.; Rigling, B.D. Low-cost acoustic array for small UAV detection and tracking. In Proceedings of the IEEE National Aerospace and Electronics Conference, Dayton, OH, USA, 16–18 July 2008; pp. 110–113. [Google Scholar] [CrossRef]
- Busset, J.; Perrodin, F.; Wellig, P.; Ott, B.; Heutschi, K.; Rühl, T.; Nussbaumer, T. Detection and tracking of drones using advanced acoustic cameras. In Unmanned/Unattended Sensors and Sensor Networks XI; and Advanced Free-Space Optical Communication Techniques and Applications, vol. 9647. International Society for Optics and Photonics; Curran Associates, Inc.: Red Hook, NY, USA, 2015; p. 96470F. [Google Scholar] [CrossRef]
- Autel X-Star Drone Webpage. Autel Robotics. Available online: https://auteldrones.com/products/x-star-premium (accessed on 12 September 2019).
- NI myRIO Hardware at a Glance. National Instruments. Available online: http://www.ni.com/product-documentation/14604/en/ (accessed on 8 February 2019).
- Dokmanic, I.; Parhizkar, R.; Ranieri, J.; Vetterli, M. Euclidean Distance Matrices: Essential Theory, Algorithms and Applications. IEEE Signal Proc. Mag. 2015, 32, 12–30. [Google Scholar] [CrossRef] [Green Version]
- Le, T.K.; Ho, K.C.; Le, T.H. Rank properties for matrices constructed from Time Differences of Arrival. IEEE Trans. Signal Process. 2018, 66, 3491–3503. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Background Noise Levels | Range (dB) | Typical Lp (dB) |
|---|---|---|
| Minimum | 70–80 | 75 |
| Medium | 80–100 | 90 |
| Maximum | 100–120 | 105 |
| Background Noise Levels | SNR (dB) | Azimuth (Mean ± Standard) Deviation | Elevation (Mean ± Standard) Deviation |
|---|---|---|---|
| Minimum | 15 | −6° ± 0.1° | 0° ± 0.1° |
| Medium | 0 | −6° ± 0.2° | 0° ± 0.1° |
| Maximum | −15 | −8° ± 1.9° | −2° ± 1.2° |
| Background Noise Levels | SNR [dB] | Azimuth (Mean ± Standard Deviation) | Elevation (Mean ± Standard Deviation) | ||||
|---|---|---|---|---|---|---|---|
| Acoustic Signal | Vertical Plane | Horizontal Plane | Acoustic Signal | Vertical Plane | Horizontal Plane | ||
| Minimum | 15 | 0° ± 0.1° | −26° ± 0.1° | 0° ± 0.1° | 6° ± 0.1° | 6° ± 0.2° | −16° ± 0.2° |
| Medium | 0 | 0° ± 0.2° | −26° ± 0.2° | 0° ± 0.2° | 6° ± 0.2° | 6° ± 0.3° | −16° ± 0.4° |
| Maximum | −15 | −2° ± 1.3° | −24° ± 1.8° | 3° ± 2.1° | 7° ± 1.8° | 8° ± 2.8° | −13° ± 3.0° |
| Background Noise Levels | SNR [dB] | Azimuth (Mean ± Standard Deviation) | Elevation (Mean ± Standard Deviation) | ||||
|---|---|---|---|---|---|---|---|
| Voice Signal | Vertical Plane | Horizontal Plane | Voice Signal | Vertical Plane | Horizontal Plane | ||
| Minimum | 15 | 0° ± 0.3° | −26° ± 0.4° | 0° ± 0.5° | 6° ± 0.5° | 6° ± 0.7° | −16° ± 0.8° |
| Medium | 0 | 0° ± 0.6° | −26° ± 0.8° | 0° ± 1.0° | 6° ± 0.8° | 5° ± 1.1° | −16° ± 1.3° |
| Maximum | −15 | 1° ± 4.8° | −24° ± 7.0° | −4° ± 8.1° | 7° ± 7.0° | 5° ± 11.0° | −13° ± 12.1° |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Izquierdo, A.; del Val, L.; Villacorta, J.J.; Zhen, W.; Scherer, S.; Fang, Z. Feasibility of Discriminating UAV Propellers Noise from Distress Signals to Locate People in Enclosed Environments Using MEMS Microphone Arrays. Sensors 2020, 20, 597. https://doi.org/10.3390/s20030597
Izquierdo A, del Val L, Villacorta JJ, Zhen W, Scherer S, Fang Z. Feasibility of Discriminating UAV Propellers Noise from Distress Signals to Locate People in Enclosed Environments Using MEMS Microphone Arrays. Sensors. 2020; 20(3):597. https://doi.org/10.3390/s20030597
Chicago/Turabian StyleIzquierdo, Alberto, Lara del Val, Juan J. Villacorta, Weikun Zhen, Sebastian Scherer, and Zheng Fang. 2020. "Feasibility of Discriminating UAV Propellers Noise from Distress Signals to Locate People in Enclosed Environments Using MEMS Microphone Arrays" Sensors 20, no. 3: 597. https://doi.org/10.3390/s20030597
APA StyleIzquierdo, A., del Val, L., Villacorta, J. J., Zhen, W., Scherer, S., & Fang, Z. (2020). Feasibility of Discriminating UAV Propellers Noise from Distress Signals to Locate People in Enclosed Environments Using MEMS Microphone Arrays. Sensors, 20(3), 597. https://doi.org/10.3390/s20030597