Automatic Guided Waves Data Transmission System Using an Oil Industry Multiwire Cable



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
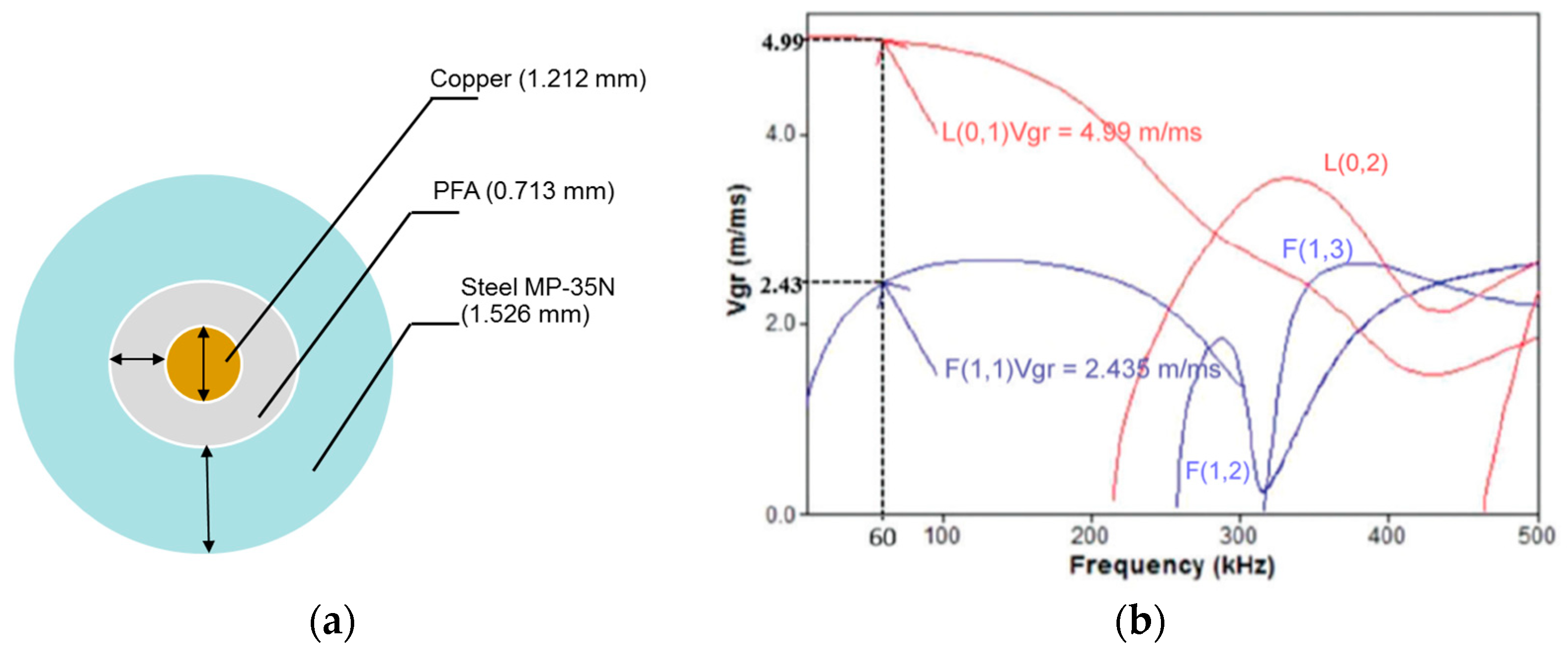
2. Guided Wave Propagation in Multiwire Cables
Frequency and Signal Selection for Guided Waves Excitation
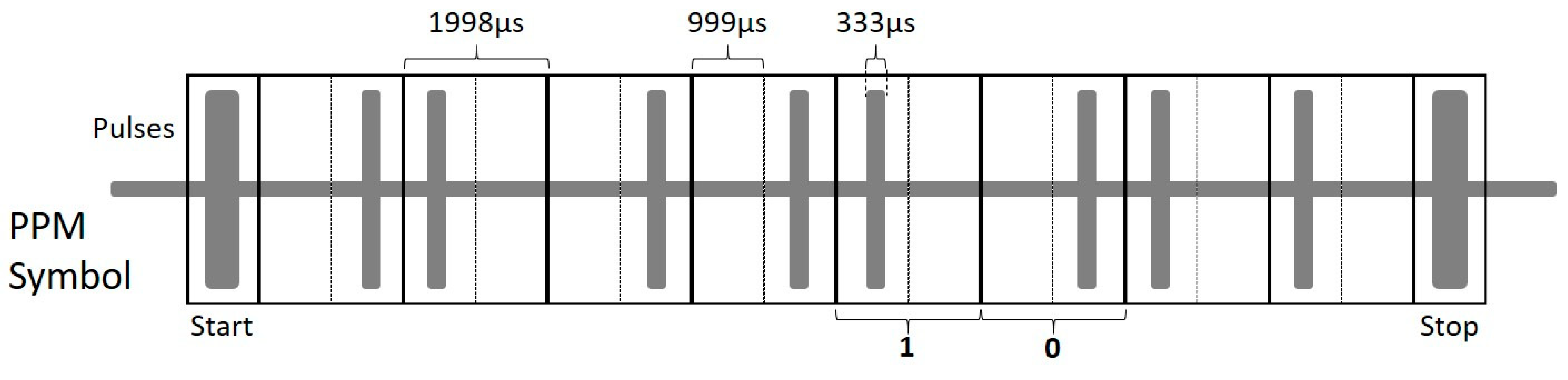
3. Pulse Position Modulation Communication
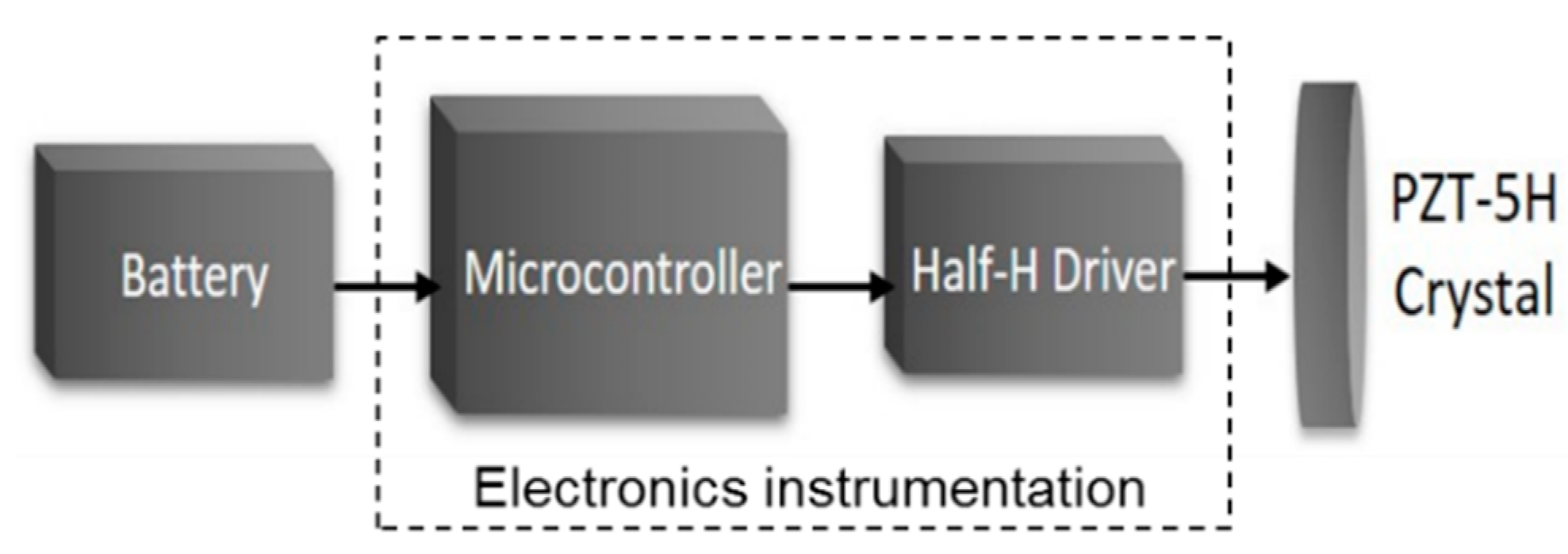
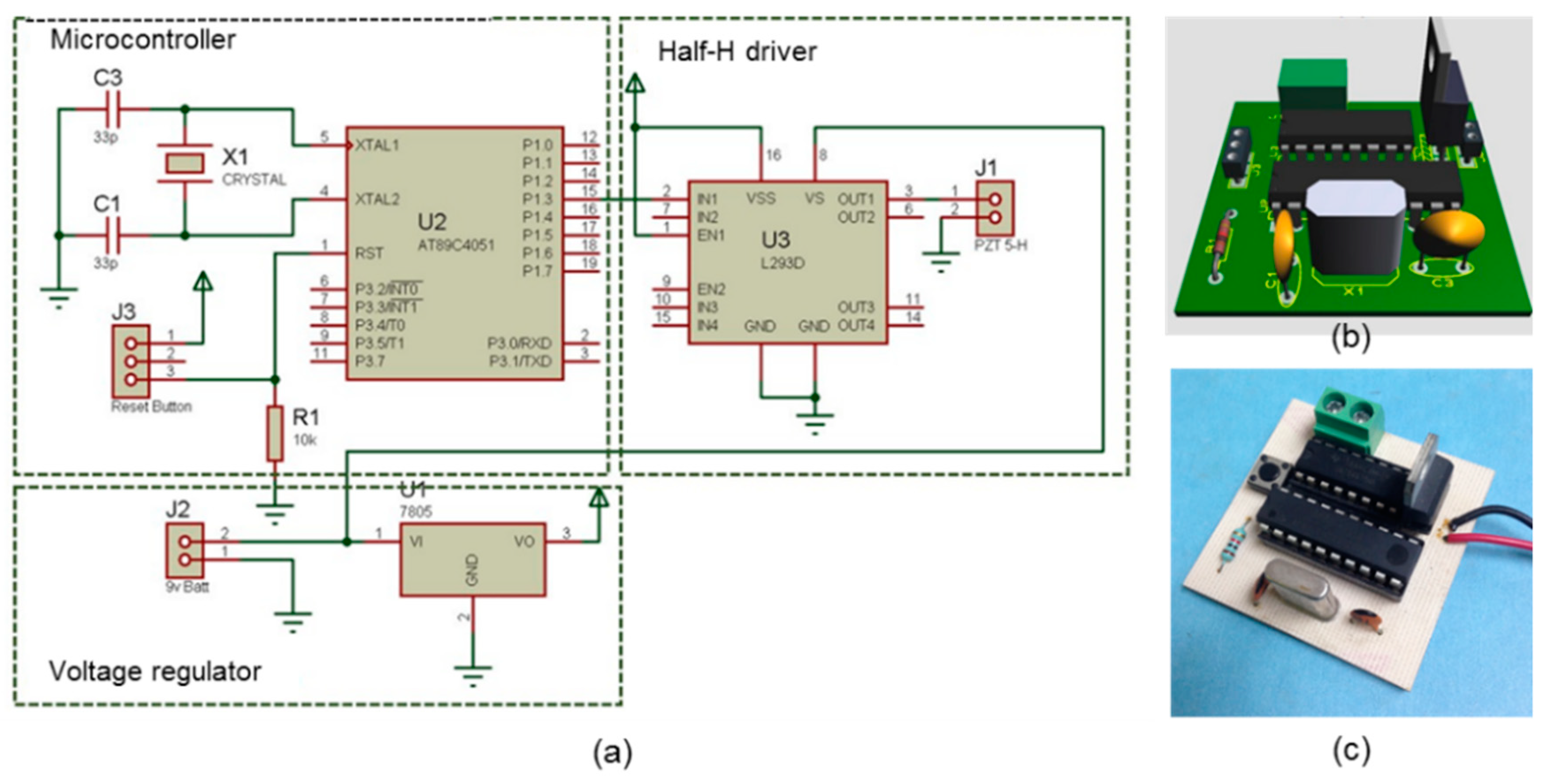
4. Automatic Guided Waves Data Transmission System
4.1. PPM Signal Transmitter
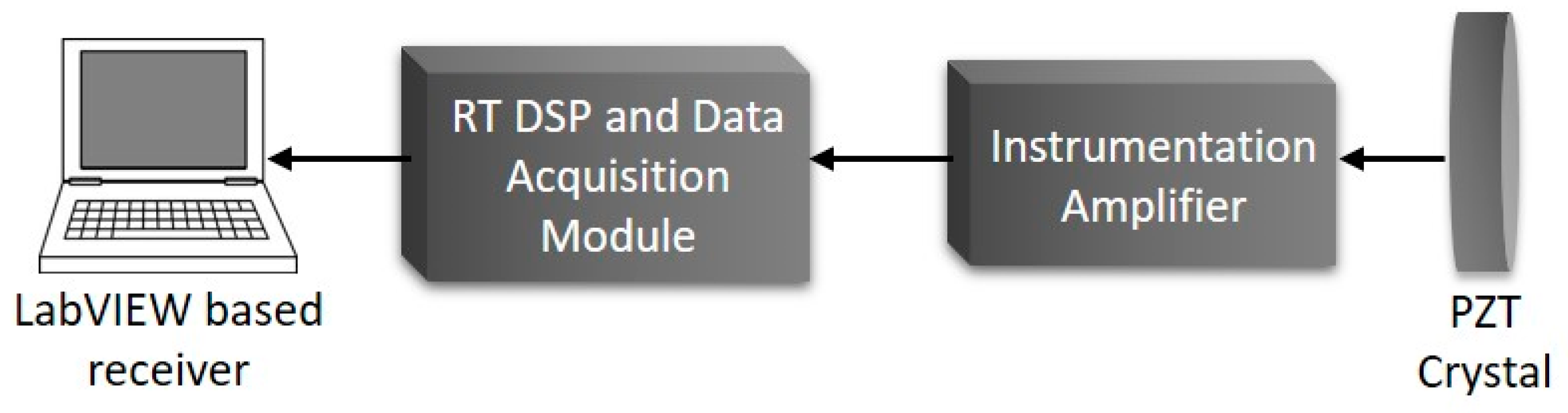
4.2. PPM Signal Receiver
Digital Signal Processing, Signal Digitalization, and PPM Demodulation
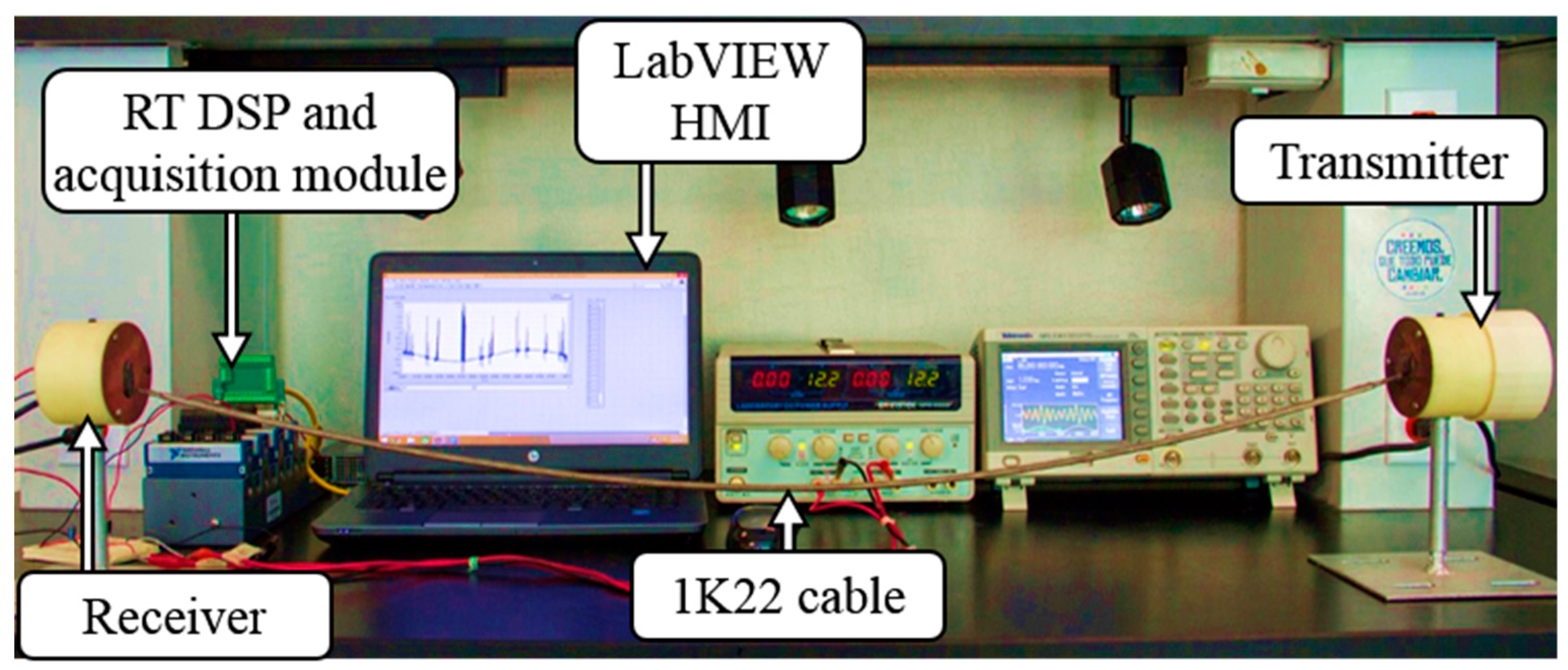
5. Experimental Configuration and Automatic PPM Communication Results
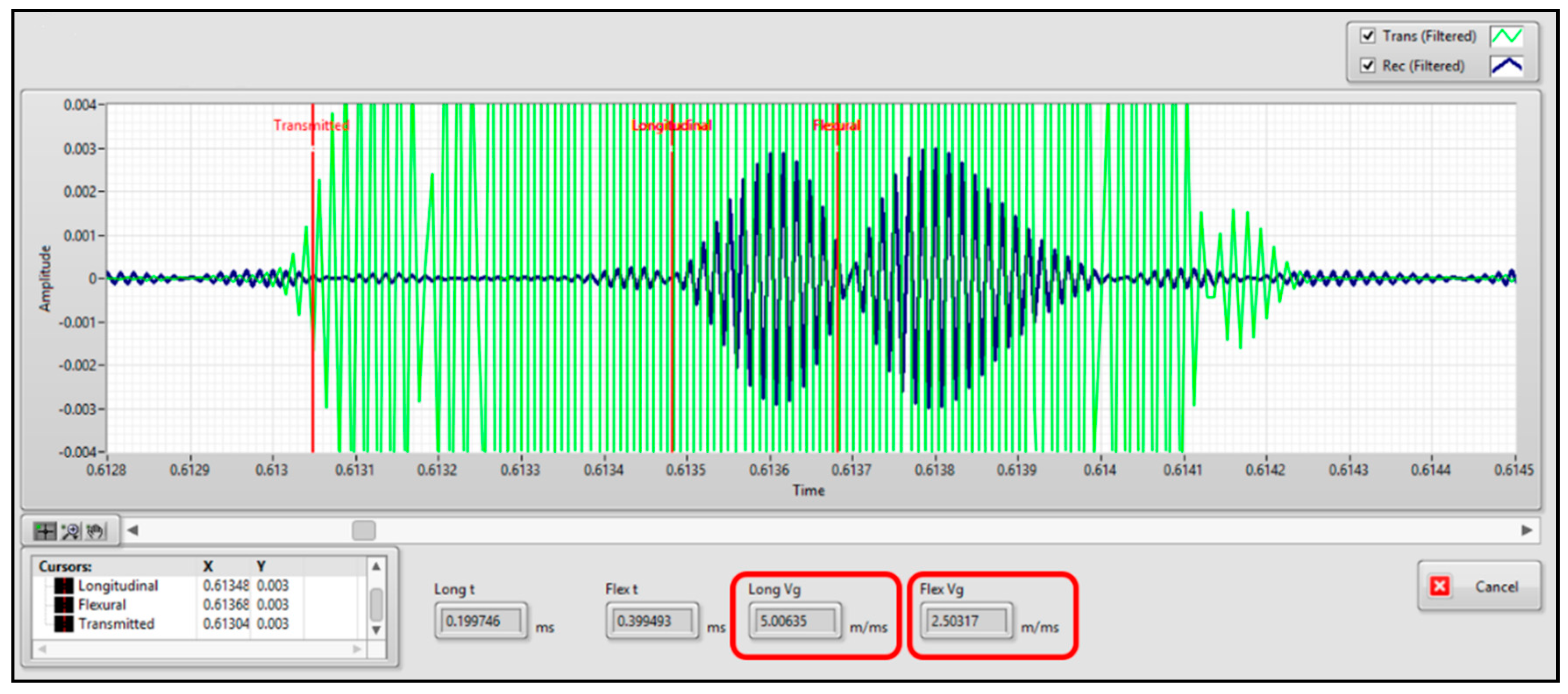
5.1. Guided Wave Propagation Mode Identification
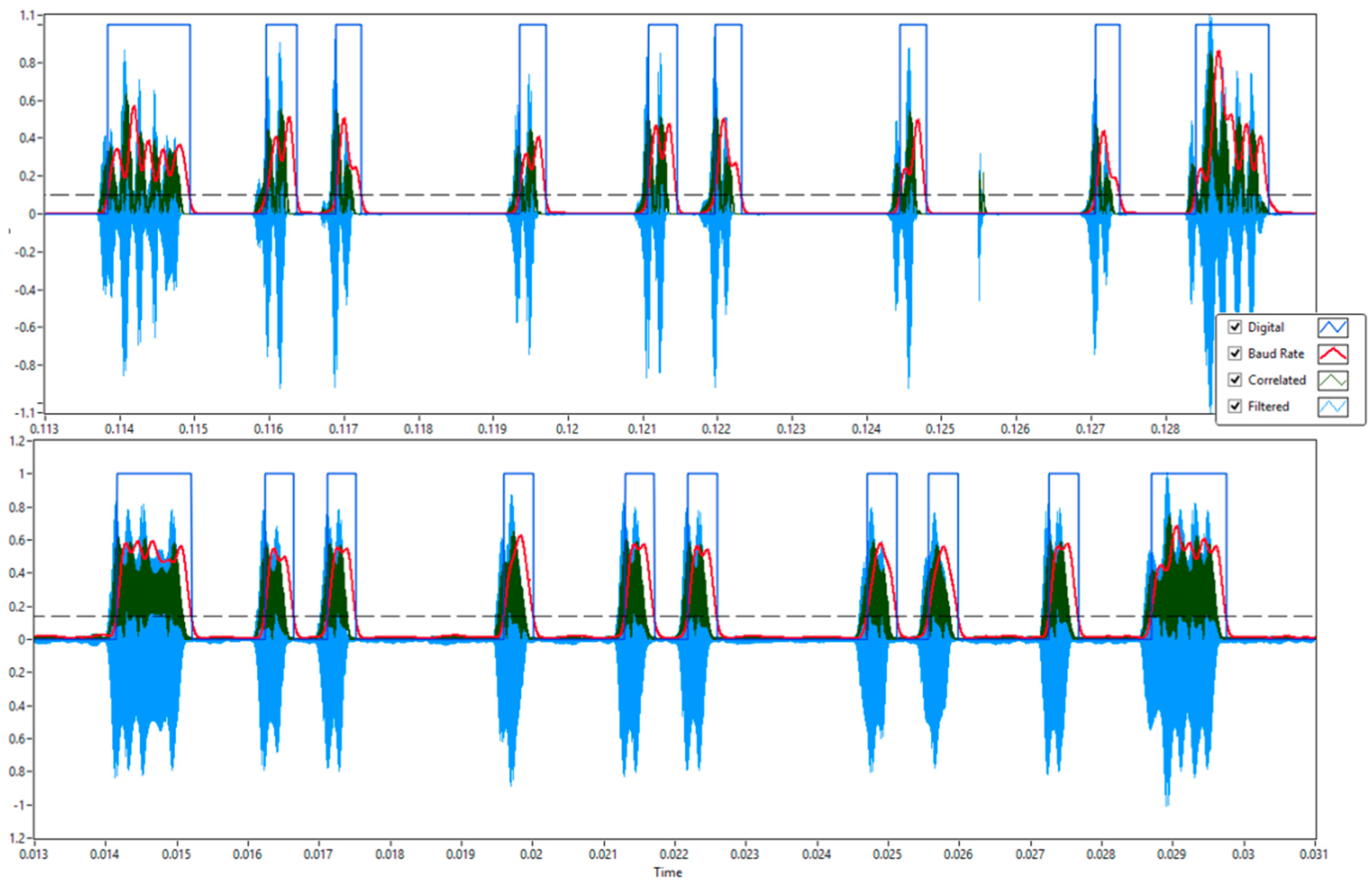
5.2. Automatic Guided Waves PPM Communication Results
6. Discussion and Further Work
Author Contributions
Funding
Conflicts of Interest
References
- Serra, O. Fundamentals of Well-Log Interpretation, The Acquisition of Logging Data; Elsevier Science Publishers B. V.: Amsterdam, The Netherlands, 1984. [Google Scholar]
- Ramesh, A. Well Logging Principles, Interpretation and Applications. Master’s Thesis, Dr. B.R. Ambedkar University, Srikakulam, India, 2016. [Google Scholar]
- Liu, Y. Interpreting Pressure and Flow Rate Data from Permanent Downhole Gauges Using Data Mining Approaches. Ph.D. Thesis, University of Stanford, Stanford, CA, USA, 2013. Available online: http://purl.stanford.edu/xp635wx9603 (accessed on 4 February 2020).
- Petroleum and Natural Gas Industries—Fixed Steel Offshore Structures. ISO 19902:2007; Geneva, Switzerland, December 2007. Available online: https://www.iso.org/standard/27507.html (accessed on 4 February 2020).
- Amani, M.; Al-Jubouri, M.; Shadravan, A. Comparative Study of Using Oil-Based Mud Versus Water-Based Mud in HPHT Fields. Adv. Pet. Explor. Dev. 2012, 4, 18–27. [Google Scholar] [CrossRef]
- Belaigues, A.; Paumard, A.; Durand, Y.; Calvert, T.J. Well Logging Communication System. U.S. Patent 4,355,310, 19 October 1982. [Google Scholar]
- Mijarez, R.; Pascacio, D.; Guevara, R.; Rodriguez, J. Signal processing algorithm for thermal drift compensation in high temperature down-hole instrumentation systems. Trans. Inst. Meas. Control 2017, 39, 1161–1168. [Google Scholar] [CrossRef]
- Mijarez, R.; Pascacio, D.; Guevara, R.; Rodríguez, J.H.; Pacheco, M.J.O. Downhole Intelligent Communication System Based on Real Time Characterization of Signal Attenuation in Coaxial Cable Used as Transmission Medium. U.S. Patent US9537606B2, 3 January 2017. [Google Scholar]
- Kessler, S.S. Certifying a structural health monitoring system: Characterising durability, reliability and longevity. In Proceedings of the 1st International Forum on Integrated Systems Health Engineering and Management in Aerospace, Napa, CA, USA, 7–10 November 2005; pp. 1–7. [Google Scholar]
- Cawley, P. Structural health monitoring: Closing the gap between research and industrial deployment. Struct. Health Monit. 2018, 17, 1225–1244. [Google Scholar] [CrossRef] [Green Version]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Rizzo, P. Ultrasonic Wave Propagation in Progressively Loaded Multi-Wire Strands. Exp. Mech. 2006, 46, 297–306. [Google Scholar] [CrossRef]
- Baltazar, A.; Hernandez-Salazar, C.D.; Manzanares-Martinez, B. Study of wave propagation in a multiwire cable to determine structural damage. NDT E Int. 2010, 43, 726–732. [Google Scholar] [CrossRef]
- Mijarez, R.; Baltazar, A.; Rodríguez Rodríguez, J.; Ramírez-Niño, J. Damage detection in ACSR cables based on ultrasonic guided waves. Dyna 2014, 81, 226–233. [Google Scholar] [CrossRef]
- Ibáñez, F.; Baltazar, A.; Mijarez, R. Detection of Damage in Multiwire Cables Based On Wavelet Entropy Evolution. Smart Mater. Struct. 2015, 24, 085036. [Google Scholar] [CrossRef]
- Legg, M.; Yücel, M.K.; Kappatos, V.; Selcuk, C.; Gan, T.-H. Increased range of ultrasonic guided wave testing of overhead transmission line cables using dispersion compensation. Ultrasonics 2015, 62, 35–45. [Google Scholar] [CrossRef] [PubMed]
- Schaal, C.; Bischoff, S.; Gaul, L. Damage Detection in Multi-Wire Cables Using Guided Ultrasonic Waves. Struct. Health Monit. 2016, 15, 279–288. [Google Scholar] [CrossRef]
- Cheng, J.; Qiu, J.; Ji, H.; Wang, E.; Takagi, T.; Uchimoto, T. High Precision Ultrasonic Guided Wave Technique for Inspection of Power Transmission Line. Chin. J. Mech. Eng. 2017, 30, 170–179. [Google Scholar] [CrossRef]
- Zhang, P.; Tang, Z.; Lv, F.; Yang, K. Numerical and Experimental Investigation of Guided Wave Propagation in a Multi-Wire Cable. Appl. Sci. 2019, 9, 1028. [Google Scholar] [CrossRef] [Green Version]
- Drumheller, D.S.; Kuszmaul, S.S. Acoustic Telemetry; Technical Report SAND2003-2614; Sandia National Laboratories: Albuquerque, NM, USA, 2003. [Google Scholar] [CrossRef] [Green Version]
- Mijarez, R.; Gaydecki, P.; Burdekin, M. Continuous monitoring guided wave encoded sensor for oil rig flooded member detection. Insight Non-Destruct. Test. Cond. Monit. 2005, 47, 748–751. [Google Scholar] [CrossRef]
- Memarzadeh, M. Optimal Bore-Hole Communication Using Multi-Carrier Modulation. Ph.D. Thesis, Rice University, Houston, TX, USA, 2007. Available online: https://scholarship.rice.edu/handle/1911/20631 (accessed on 4 February 2020).
- Mijarez, R.; Gaydecki, P. Automatic guided wave PPM communication system for potential SHM of flooding members in sub-sea oil rigs. Smart Mater. Struct. 2013, 22, 055031. [Google Scholar] [CrossRef]
- Jin, Y.; Ying, Y.; Zhao, D. Data communications using guided elastic waves by time reversal pulse position modulation: Experimental study. Sensors 2013, 13, 8352–8376. [Google Scholar] [CrossRef] [PubMed]
- Chakraborty, S.; Saulnier, G.J.; Wilt, K.W.; Curt, E.; Scarton, H.A.; Litman, R.B. Low-power, low-rate ultrasonic communications system transmitting axially along a cylindrical pipe using transverse waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2015, 62, 1788–1796. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Saniie, J.; Bakhtiari, S.; Heifetz, A. Applying EMAT for ultrasonic communication through steel plates and pipes. In Proceedings of the IEEE International Conference on Electro/Information Technology, Rochester, MI, USA, 3–5 May 2018; pp. 0379–0383. [Google Scholar]
- Wu, A.; He, S.; Ren, Y.; Wang, N.; Ho, S.C.H.; Song, G. Design of a New Stress Wave-Based Pulse Position Modulation (PPM) Communication System with Piezoceramic Transducers. Sensors 2019, 19, 558. [Google Scholar] [CrossRef] [Green Version]
- Shoudy, D.; Saulnier, G.J.; Scarton, H.A.; Das, P.K.; Roa-Prada, S.; Ashdown, J.D.; Gavens, A.J. An Ultrasonic Through-Wall Communication System with Power Harvesting. In Proceedings of the IEEE Ultrasonics, Symposium Proceedings, New York City, NY, USA, 28–31 October 2007; pp. 1848–1853. [Google Scholar]
- Primerano, R.; Kam, M.; Dandekar, K. High bit rate ultrasonic communication through metal channels. In Proceedings of the IEEE 43rd Annual Conference on Information Sciences and Systems, Baltimore, MD, USA, 18–20 March 2009; pp. 902–906. [Google Scholar]
- Hosman, T.; Yeary, M.; Antonio, J.K. Design and characterisation of an MFSK-based transmitter/receiver for ultrasonic communication through metallic structures. IEEE Trans. Instrum. Meas. 2011, 60, 3767–3774. [Google Scholar] [CrossRef] [Green Version]
- Ashdown, J.D.; Saulnier, G.J.; Lawry, T.J.; Wilt, K.R.; Scarton, H.A.; Pascarelle, S.; Pinezich, J.D. Multi-Channel Data Communication Through Thick Metallic Barriers. In Proceedings of the IEEE International Conference on Communications, Ottawa, ON, Canada, 10–15 June 2012; pp. 4678–4683. [Google Scholar]
- Lawry, T.J.; Saulnier, G.J.; Ashdown, J.D.; Scarton, H.A.; Gavens, A. A Full-Duplex Ultrasonic Through-Wall Communication and Power Delivery System with Frequency Tracking. U.S. Patent US9455791, 27 September 2016. [Google Scholar]
- Yang, D.; Hu, Z.; Zhao, H.; Hu, H.; Sun, Y.; Hou, B. Through-Metal-Wall Power Delivery and Data Transmission for Enclosed Sensors: A Review. Sensors 2015, 15, 31581–31605. [Google Scholar] [CrossRef] [PubMed]
- Primerano, R.A.; Kam, M.; Dandekar, K.R.; Gindhart, C. System for Ultrasonic Communication Across Curved Metal Surfaces. U.S. Patent US0163354 A1, 8 June 2017. [Google Scholar]
- Ashdown, J.D.; Liu, L.; Saulnier, G.J.; Wilt, K.R. High-Rate Ultrasonic Through-Wall Communications Using MIMO-OFDM. IEEE Trans. Commun. 2018, 66, 3381–3393. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, Z.; Yang, H.; Wu, M.; Yang, J. Ultrasonic Wireless Communication Through Metal Barriers. Sound Vib. 2019, 53, 2–15. [Google Scholar] [CrossRef] [Green Version]
- Moll, J.; De Marchi, L.; Marzani, A. Transducer-to-Transducer Communication in Guided Wave Based Structural Health Monitoring. In Proceedings of the 19th World Conference on Non-Destructive Testing, Munich, Germany, 13–17 June 2016; pp. 1–8. [Google Scholar]
- Moll, J.; Mälzer, M.; De Marchi, L.; Testoni, N.; Marzani, A. Experimental Analysis of Digital Data Communication in Intelligent Structures Using Lamb Waves. In Proceedings of the 11th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 12–14 September 2017; pp. 1654–1661. [Google Scholar]
- Moll, J.; Kexel, C.; Mälzer, M. Complex Intelligent Structures with Data Communication Capabilities. In Proceedings of the 9th European Workshop on Structural Health Monitoring, Manchester, UK, 10–13 July 2018; pp. 1–7. [Google Scholar]
- Kexel, C.; Mälzer, M.; Moll, J. Guided Wave Based Acoustic Communications in Structural Health Monitoring Systems in the Presence of Structural Defects. In Proceedings of the IEEE International Symposium on Circuits and Systems, Florence, Italy, 27–30 May 2018; pp. 1–4. [Google Scholar]
- Wang, B.; Saniie, J.; Bakhtiari, S.; Heifetz, A. Software Defined Ultrasonic System for Communication Through Solid Structures. In Proceedings of the IEEE International Conference on Electro/Information Technology, Rochester, MI, USA, 3–5 May 2018; pp. 1–4. [Google Scholar]
- Kexel, C.; Kexel, C.; Maetz, T.; Mälzer, M.; Moll, J. Digital communication across orthotropic composite components using guided waves. Compos. Struct. 2019, 209, 481–489. [Google Scholar] [CrossRef]
- Mateo, C.; Talavera, J.A.; Muñoz, A. Elastic Guided Wave Propagation in Electrical Cables. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 1423–1429. [Google Scholar] [CrossRef]
- Mateo, C. Modos de Propagación de las Ondas Elásticas en los Cables Eléctricos. Ph.D. Thesis, Universidad Pontificia Comillas de Madrid, Madrid, Spain, 2007. (In Spanish). [Google Scholar]
- Trane, G.; Mijarez, R.; Guevara, R.; Baltazar, A. PZT guided waves sensor permanently attached on multi-wire AWG12 cables used as communication medium. AIP Conf. Proc. 2015, 1650, 631–639. [Google Scholar]
- Trane, G.; Mijarez, R. Guided waves PPM encoded system using AWG12 cables as communication channel. In Proceedings of the 11th European Conference on Non-Destructive Testing (ECNDT 2014), Prague, Czech Republic, 6–10 October 2014; pp. 1–8. [Google Scholar]
- Trane, G.; Mijarez, R.; Guevara, R.; Pascacio, D. PPM-based system for guided waves communication through corrosion resistant multi-wire cables. Phys. Procedia 2015, 70, 672–675. [Google Scholar] [CrossRef] [Green Version]
- CAMESA EMC Product Catalogue—7/32″ (5.69 mm) Monoconductor 1K22. Available online: http://www.camesaemc.com/Resource_/PageResource/Camesa/1K22%20MP35N.pdf (accessed on 5 February 2020).
- Graff, K.F. Wave Motion in Elastic Solids; Dover Pbs.: New York, NY, USA, 1991. [Google Scholar]
- Pavlakovic, B.; Lowe, M. Disperse User Manual: A System for Generating Dispersion Curves; Imperial College, University of London: London, UK, 2003. [Google Scholar]
- Cawley, P.; Lowe, M.; Alleyne, D.N.; Pavlakovic, B.; Wilcox, P. Practical long-range guided wave testing: Applications to pipes and rail. Mater. Eval. 2003, 61, 66–74. [Google Scholar]
- Cawley, P.; Alleyne, D. The use of Lamb waves for the long-range inspection of large structures. Ultrasonics 1996, 34, 287–290. [Google Scholar] [CrossRef]
- Pollakowski, M.; Ermert, H. Chirp signal matching and signal power optimisation in pulse-echo mode ultrasonic non-destructive testing. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1994, 41, 655–659. [Google Scholar] [CrossRef]
- McAulay, R.J. Optimal control techniques applied to PPM signal design. Inf. Control 1968, 12, 221–235. [Google Scholar] [CrossRef] [Green Version]
- Hamkins, J.; Moision, B. Selection of modulation and codes for deep-space optical communications. In Proceedings of the of SPIE, Free-Space Laser Communication Technologies XVI, San Jose, CA, USA, 16 June 2004; pp. 123–130. [Google Scholar]
- Wozencraft, J.M.; Jacobs, I.M. Principles of Communication Engineering; Waveland Press, Inc.: Long Grove, IL, USA, 1990. [Google Scholar]
- Trane, G.; Mijarez, R.; Guevara, R.; Baltazar, A. Guided wave sensor for simple digital communication through an oil industry multi-wire cable. Insight Non-Destruct. Test. Cond. Monit. 2018, 60, 206–211. [Google Scholar] [CrossRef]
- Trane, G.; Mijarez, R.; Guevara, R.; Perez, A. A simplex guided wave communication system using oil industry multi-wire cable. In Proceedings of the 9th European Workshop on Structural Health Monitoring, Manchester, UK, 10–13 July 2018; pp. 1–12. [Google Scholar]
- Mijarez, R. Electronica; Grupo Editorial Patria: México, D.F., Mexico, 2014. (In Spanish) [Google Scholar]
- Singh, Y.; Tripathi, S.; Pandey, M. Analysis of digital IIR filter with Labview. Int. J. Comput. Appl. 2010, 10, 23–30. [Google Scholar] [CrossRef]
- Gaydecki, P. Foundations of Digital Signal Processing: Theory, Algorithms and Hardware Design; The Institute of Electrical Engineers: London, UK, 2004. [Google Scholar]
- Albu, M.; Heydt, G.T. On the rms values in power quality assessment. IEEE Trans. Power Deliv. 2003, 18, 1586–1587. [Google Scholar] [CrossRef]
















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trane, G.; Mijarez, R.; Pérez-Díaz, J.A. Automatic Guided Waves Data Transmission System Using an Oil Industry Multiwire Cable. Sensors 2020, 20, 868. https://doi.org/10.3390/s20030868
Trane G, Mijarez R, Pérez-Díaz JA. Automatic Guided Waves Data Transmission System Using an Oil Industry Multiwire Cable. Sensors. 2020; 20(3):868. https://doi.org/10.3390/s20030868
Chicago/Turabian StyleTrane, Gianpiero, Rito Mijarez, and Jesús Arturo Pérez-Díaz. 2020. "Automatic Guided Waves Data Transmission System Using an Oil Industry Multiwire Cable" Sensors 20, no. 3: 868. https://doi.org/10.3390/s20030868
APA StyleTrane, G., Mijarez, R., & Pérez-Díaz, J. A. (2020). Automatic Guided Waves Data Transmission System Using an Oil Industry Multiwire Cable. Sensors, 20(3), 868. https://doi.org/10.3390/s20030868