An Array Switching Strategy for Direction of Arrival Estimation with Coprime Linear Array in the Presence of Mutual Coupling



Abstract
:1. Introduction
- (1)
- The unknown mutual coupling in CLA potentially degrades the estimation performance, whereas the conventional calibration methods for uniform arrays are difficult to apply to CLA due to its nonuniform structure. To tackle this issue, we comprehensively investigate the characteristics of mutual coupling in CLA and significantly mitigate the mutual coupling by exploiting the inherent sparse structural features of CLA.
- (2)
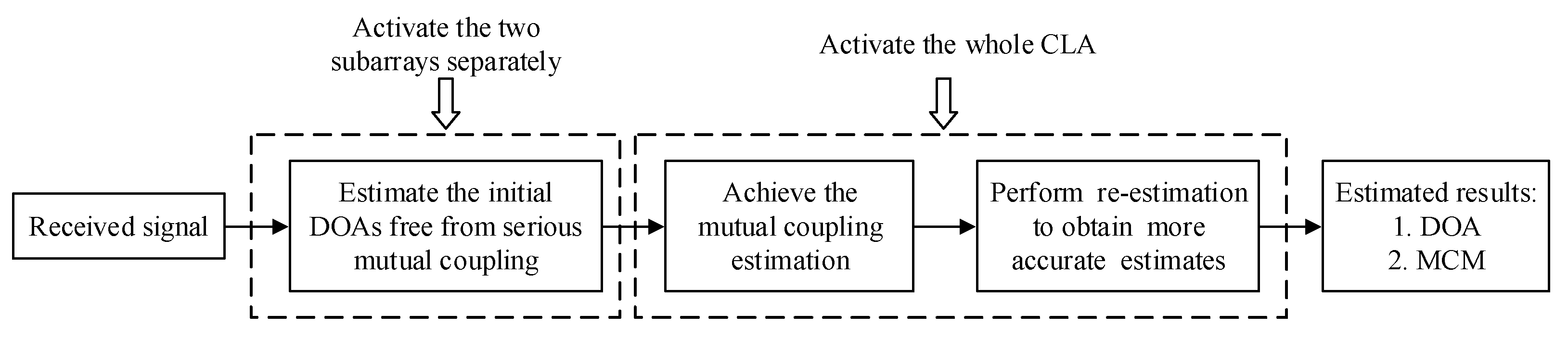
- We propose an array switching strategy, which can be developed for online calibration, by separately activating the subarrays of CLA to considerably alleviate the severe mutual coupling caused by the two interleaved subarrays in CLA and calculate the well-performed DOA estimates with the signals from subarrays based on the coprime property.
- (3)
- We reconstruct the contaminated received signal of the total CLA to directly solve the mutual coupling coefficients by utilizing the initial DOA estimates and, in turn, calculate the refined DOA estimates via an iteration procedure. In particular, the reconstruction of the steering vector of CLA for decoupling can be extended to nonuniform linear arrays of arbitrary structure.
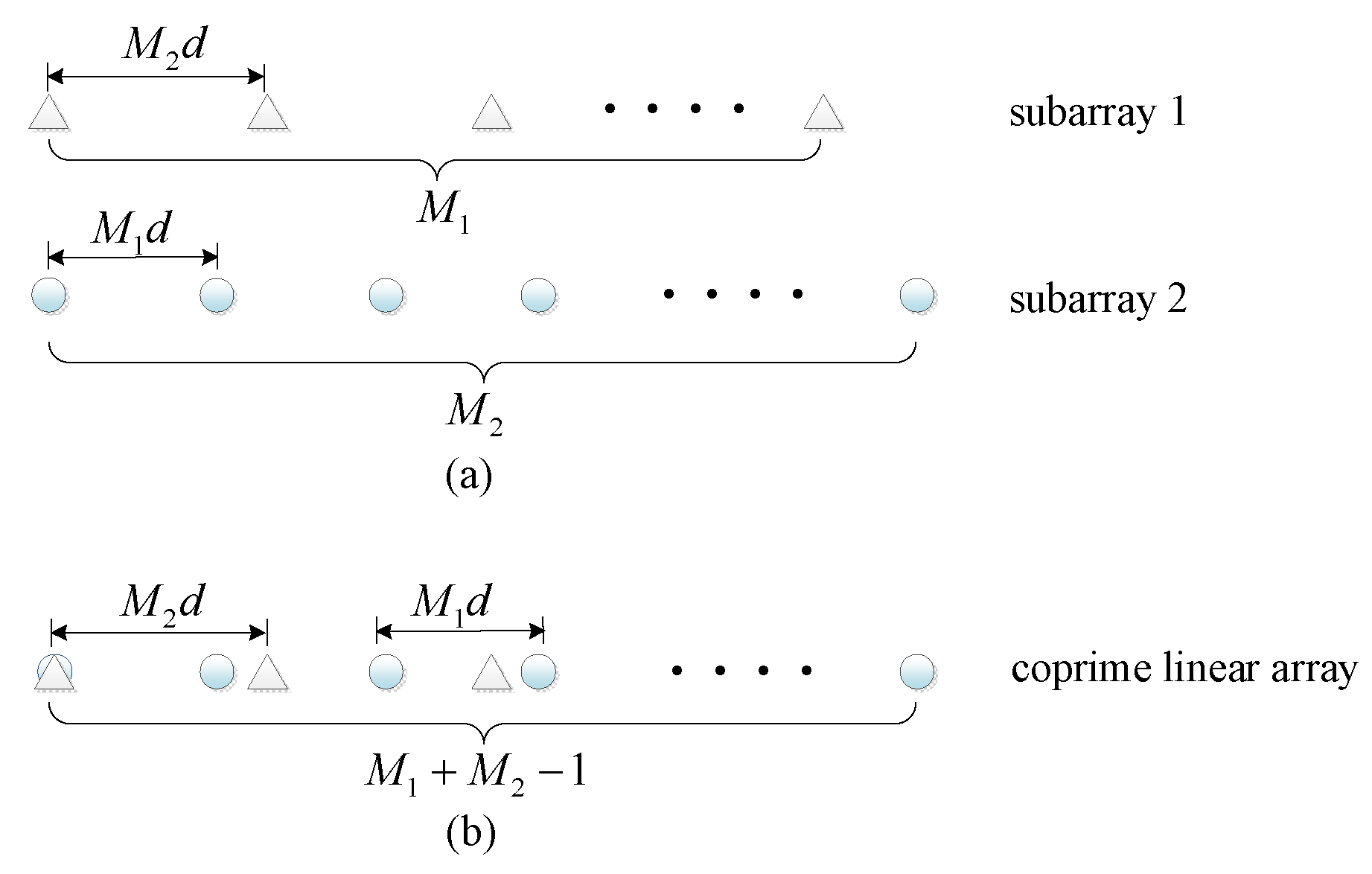
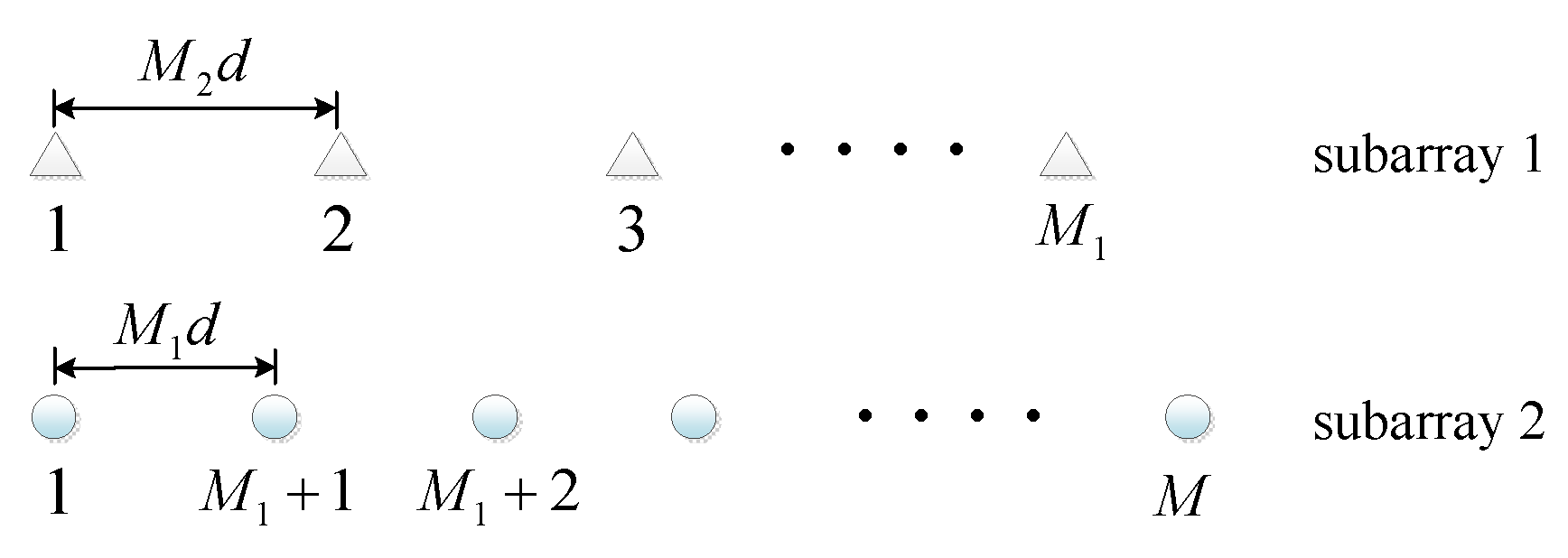
2. Preliminaries
2.1. Data Model without Mutual Coupling
2.2. Data Model with Mutual Coupling
3. The Proposed Parameter Estimation Scheme
3.1. Initial DOA Estimation
3.2. Mutual Coupling Estimation
3.3. Iteration Procedure for Refined Estimation
3.4. Procedure of the Proposed Scheme
4. Performance Analysis
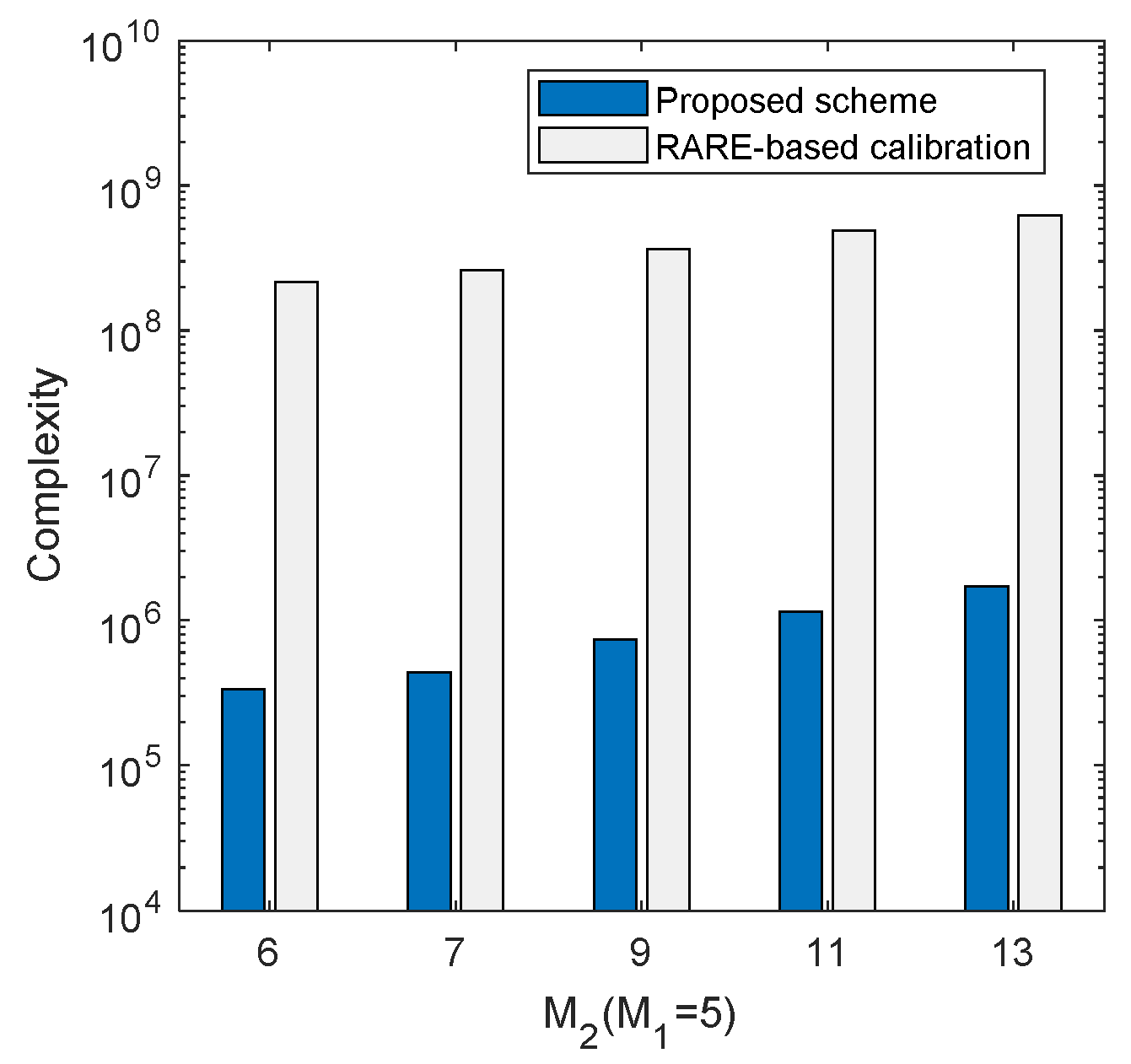
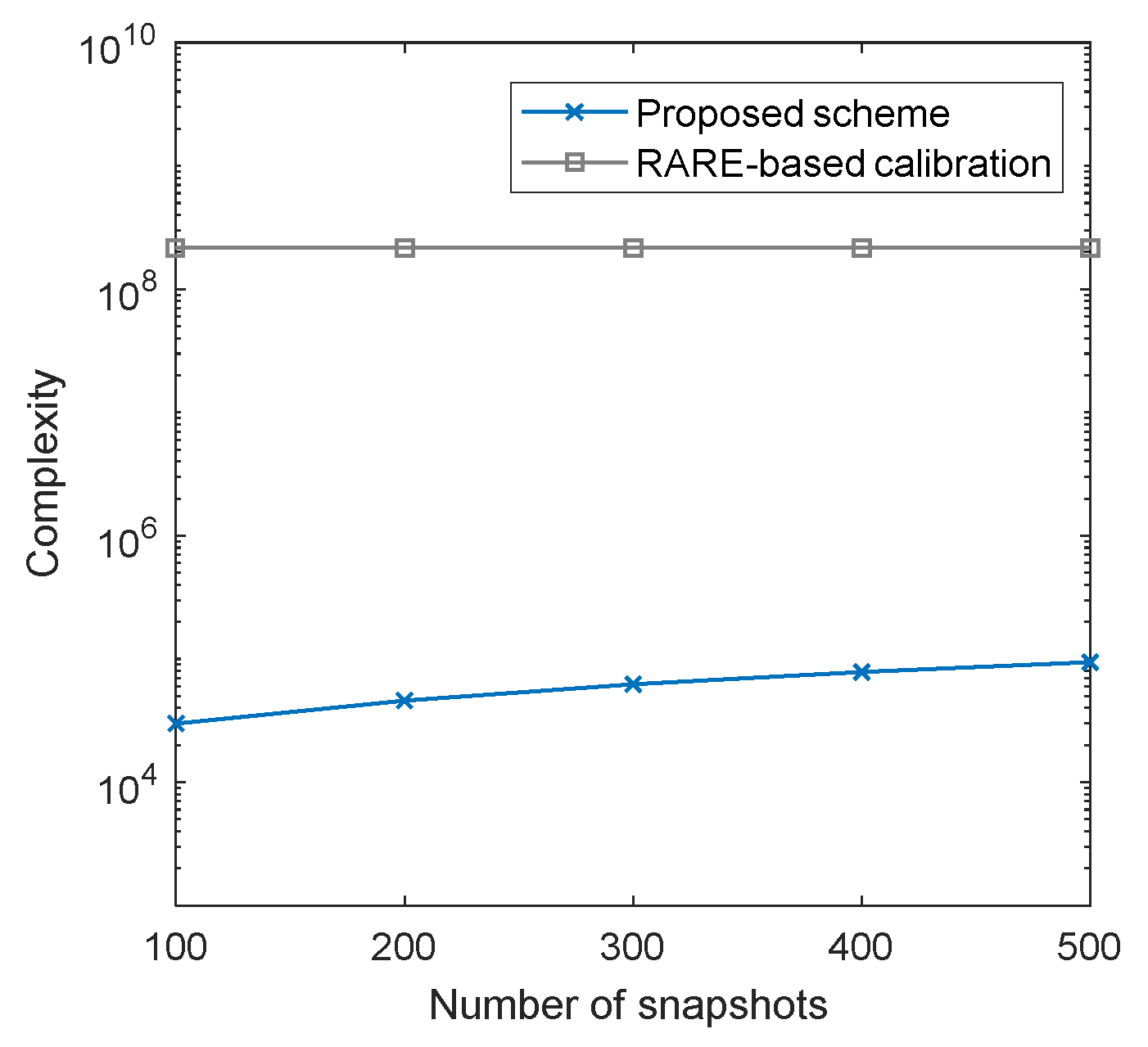
4.1. Complexity Analysis
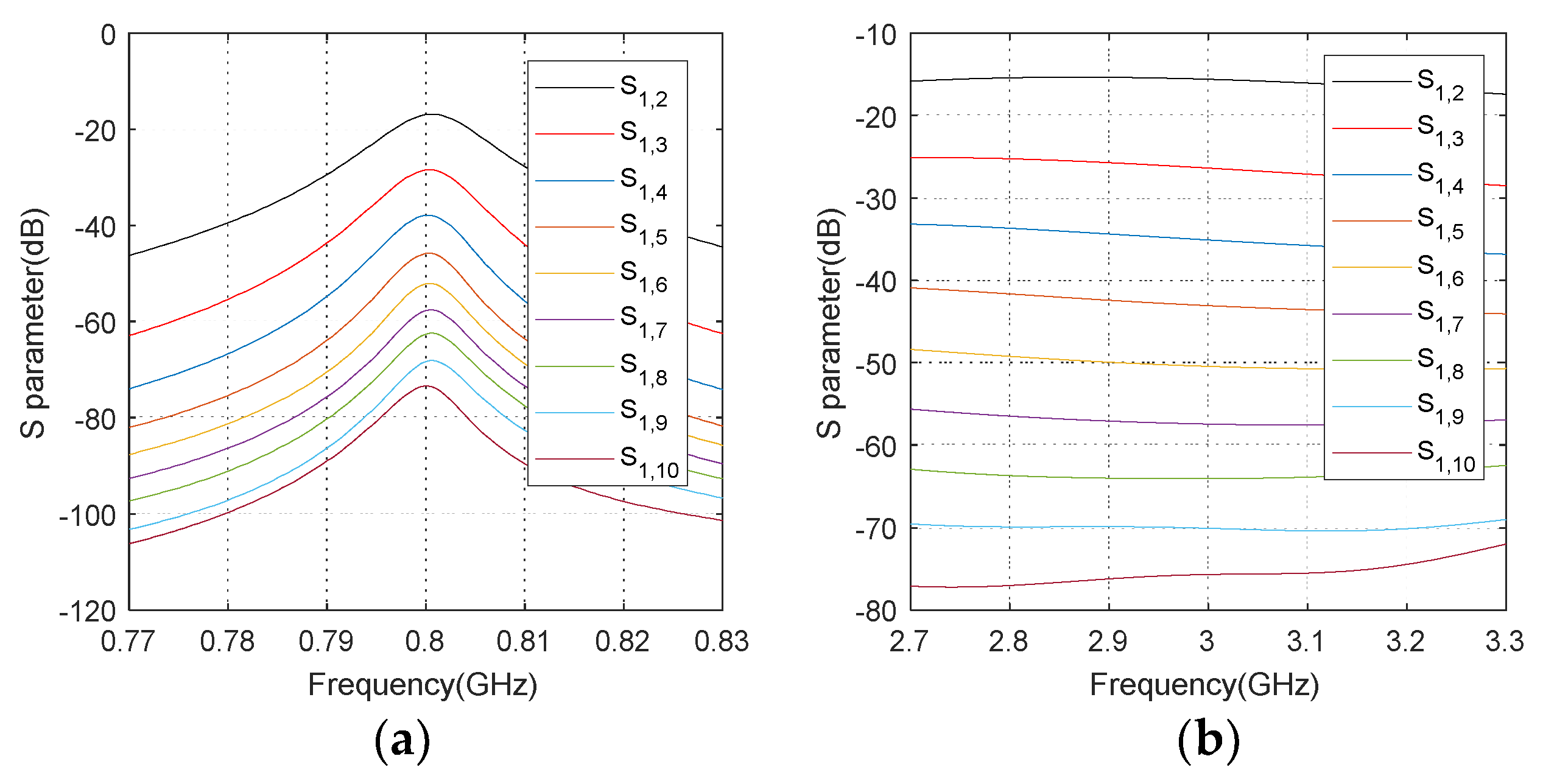
4.2. Mutual Coupling Analysis
4.3. Cramer-Rao Bound
4.4. Advantages
- (1)
- The proposed scheme can be employed as an online calibration technique, which requires no extra auxiliary sources or auxiliary sensors.
- (2)
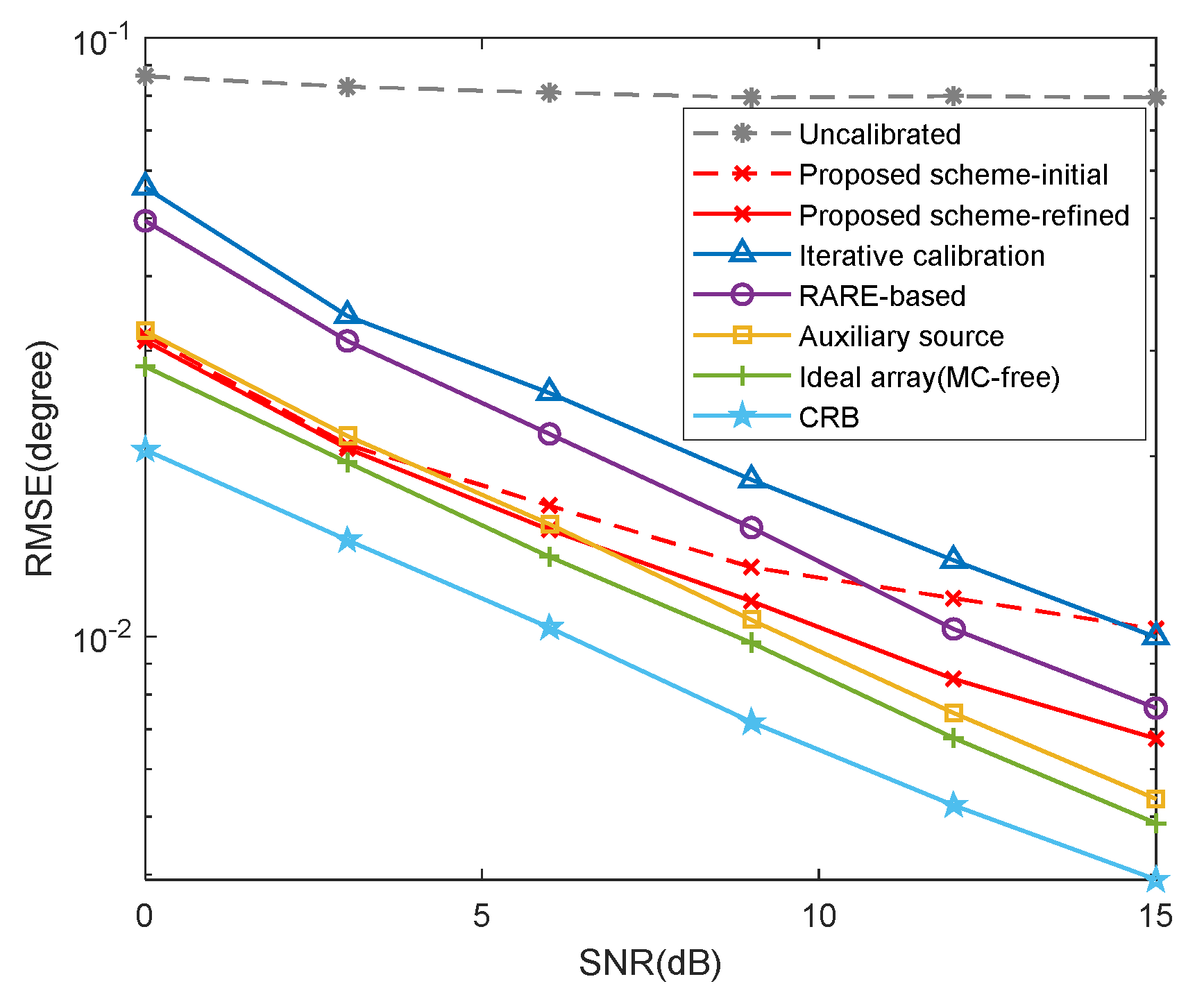
- The proposed scheme can significantly alleviate the mutual coupling by exploiting the structural characteristics of CLA. In particular, it outperforms the RARE-based and iterative calibration methods in parameter estimation, which is illustrated in Section 5.
- (3)
- The proposed scheme is computationally efficient since no spectral search is required, which is attractive in practical applications.
5. Simulation Results
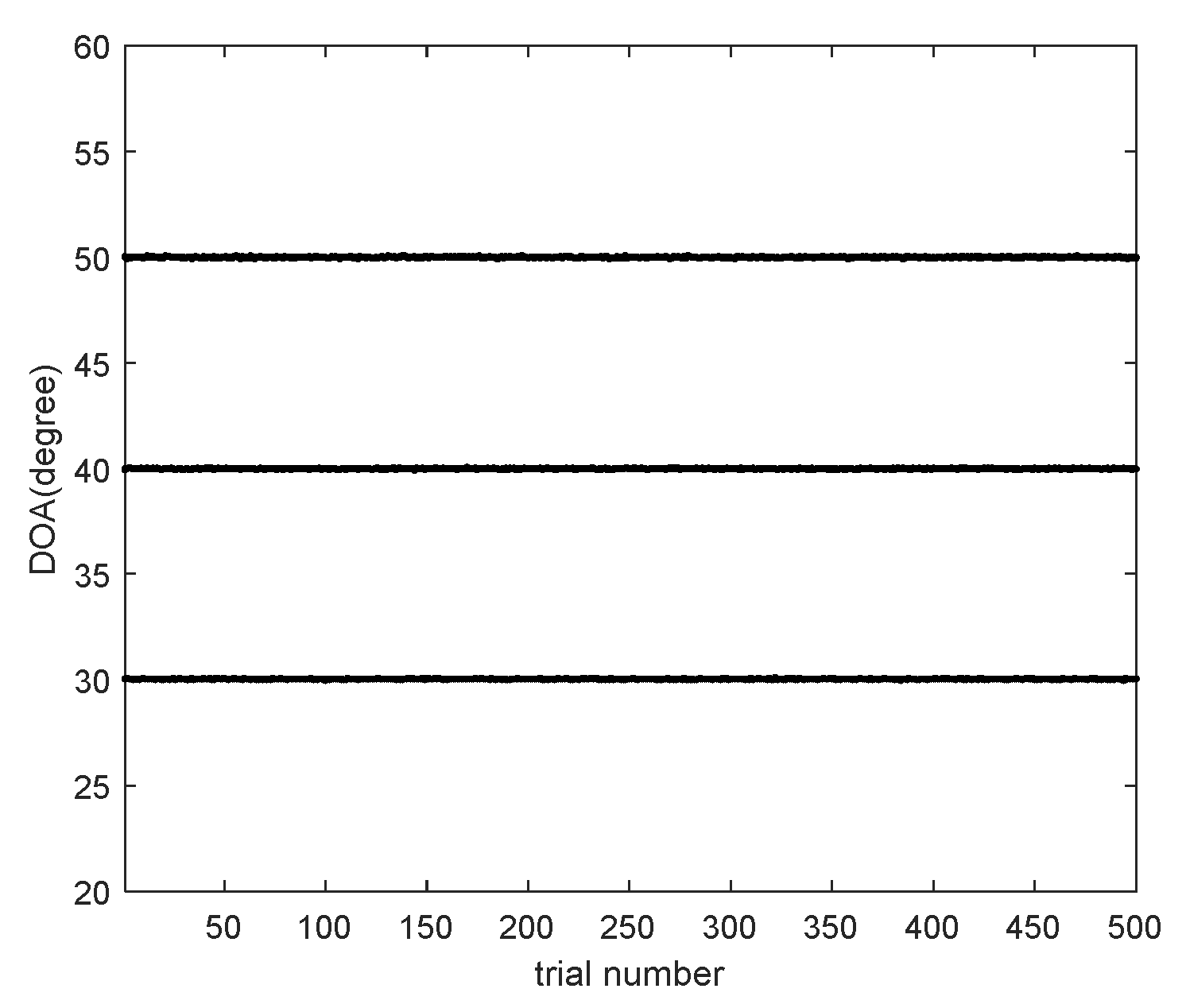
5.1. Verification of the Parameter Estimation
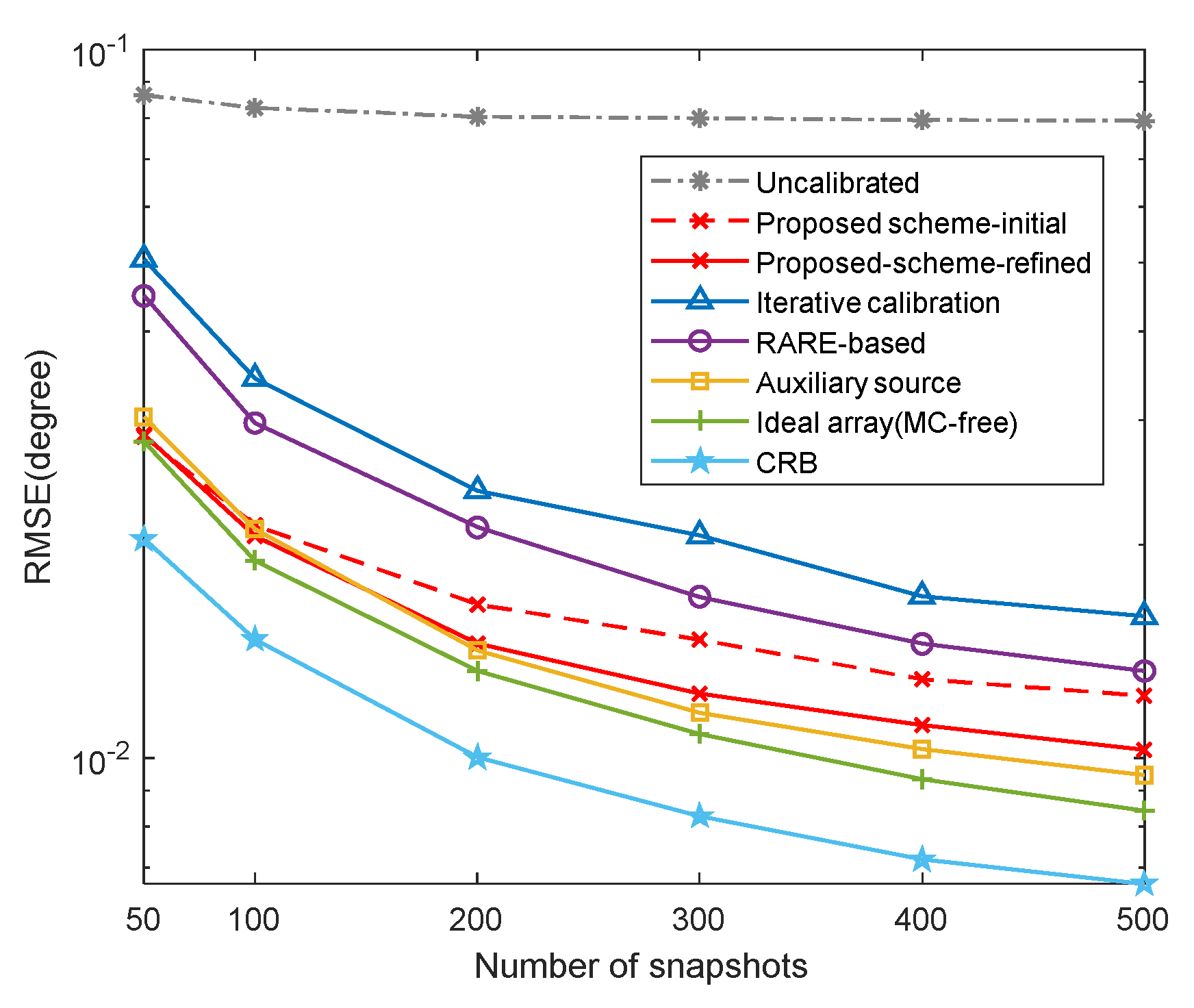
5.2. RMSE Performance of Different Schemes
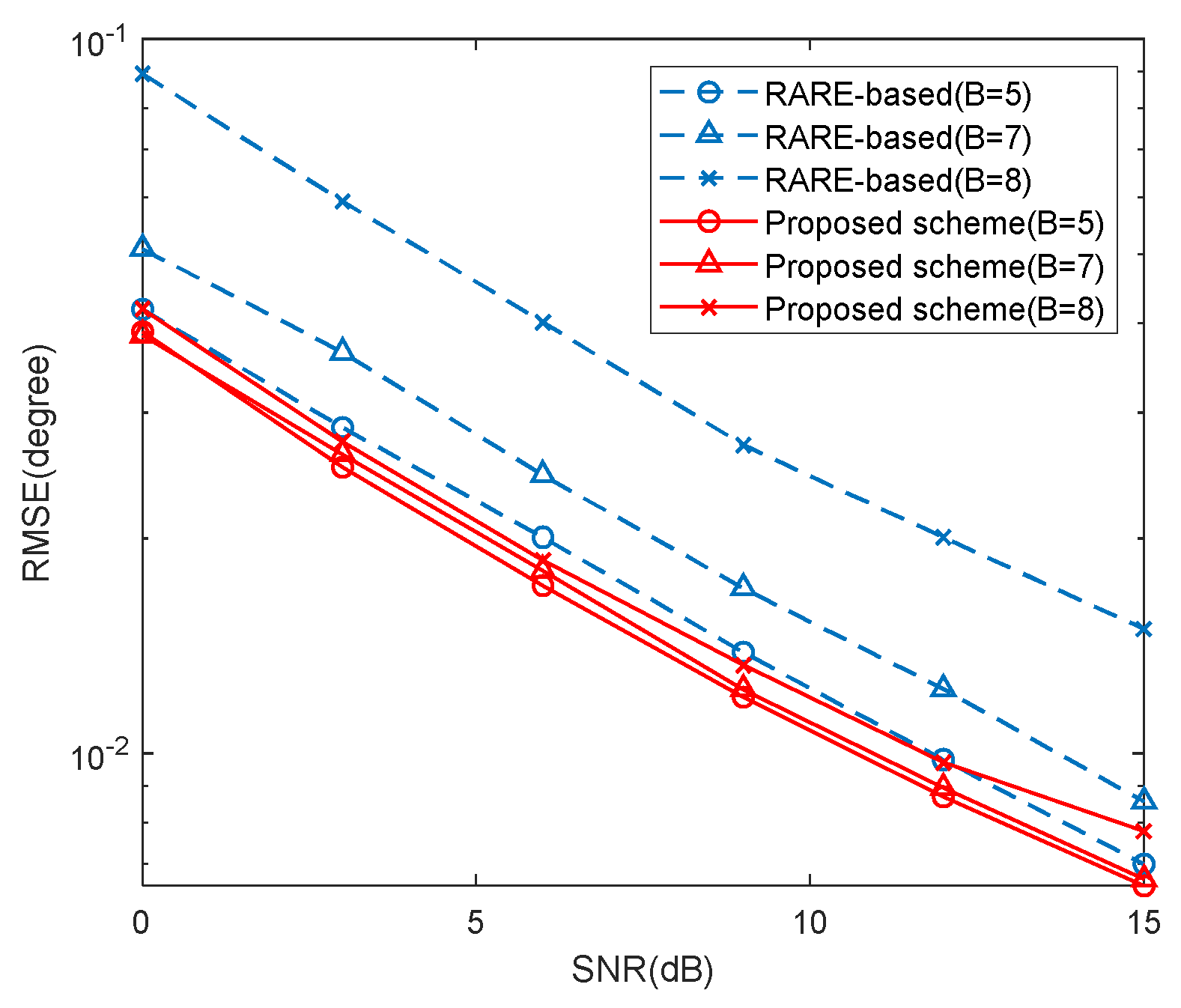
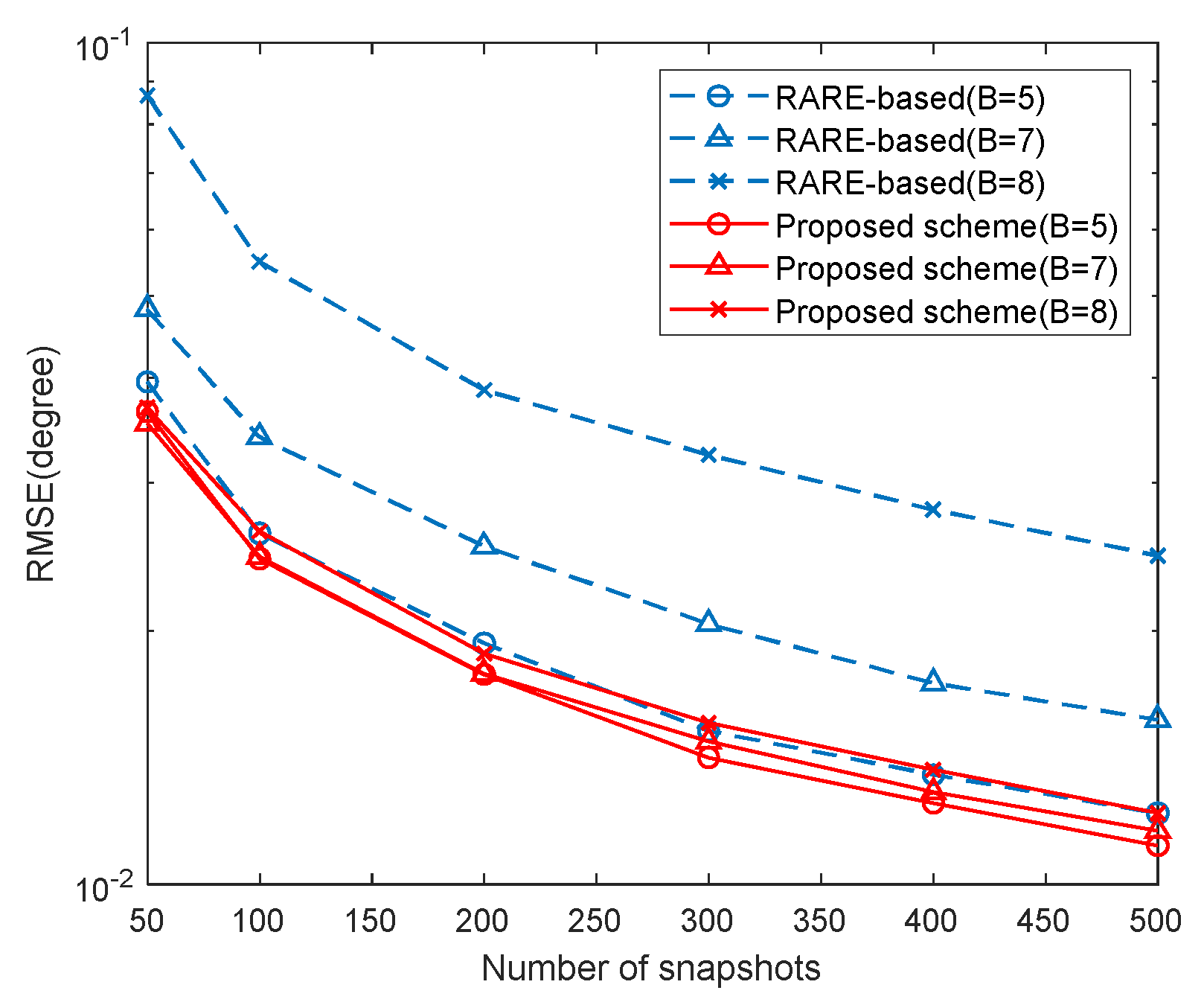
5.3. RMSE Performance of Different Mutual Coupling
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, X.; Xu, L.; Xu, L.; Xu, D. Direction of departure (DOD) and direction of arrival (DOA) estimation in MIMO radar with reduced-dimension MUSIC. IEEE Commun. Lett. 2010, 14, 1161–1163. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.; Chen, H. Improved two-dimensional DOA estimation algorithm for two-parallel uniform linear arrays using propagator method. Signal Process. 2012, 92, 3032–3038. [Google Scholar] [CrossRef]
- Wen, F. Computationally efficient DOA estimation algorithm for MIMO radar with imperfect waveforms. IEEE Commun. Lett. 2019, 23, 1037–1040. [Google Scholar] [CrossRef]
- Wang, H.; Wan, L.; Dong, M.; Ota, K.; Wang, X. Assistant vehicle localization based on three collaborative base stations via SBL-based robust DOA estimation. IEEE Internet Things J. 2019, 6, 5766–5777. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; He, S.; Shi, Z. A robust and efficient algorithm for coprime array adaptive beamforming. IEEE Trans. Veh. Technol. 2018, 67, 1099–1112. [Google Scholar] [CrossRef]
- Wen, F.; Shi, J.; Zhang, Z. Joint 2D-DOD, 2D-DOA and polarization angles estimation for bistatic EMVS-MIMO radar via PARAFAC analysis. IEEE Trans. Veh. Technol. 2019, 69, 1626–1638. [Google Scholar] [CrossRef]
- Wang, X.; Wan, L.; Huang, M.; Shen, C.; Zhang, K. Polarization channel estimation for circular and non-circular signals in massive MIMO systems. IEEE J. Sel. Top. Signal Process. 2019, 13, 1001–1016. [Google Scholar] [CrossRef]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Viberg, M.; Ottersten, B.; Kailath, T. Detection and estimation in sensor arrays using weighted subspace fitting. IEEE Trans. Signal Process. 1991, 39, 2436–2449. [Google Scholar] [CrossRef]
- Barabell, A. Improving the resolution performance of eigenstructure-based direction-finding algorithms. In Proceedings of the 1983 IEEE International Conference on Acoustics, Speech, and Signal Processing, Boston, MA, USA, 14–16 April 1983; pp. 336–339. [Google Scholar]
- Vaidyanathan, P.P.; Pal, P. Theory of sparse coprime sensing in multiple dimensions. IEEE Trans. Signal Process. 2011, 59, 3592–3608. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. A novel array structure for directions-of-arrival estimation with increased degrees of freedom. In Proceedings of the 2010 IEEE International Conference on Acoustics, Speech and Signal Processing, Dallas, TX, USA, 14–19 March 2010; pp. 2606–2609. [Google Scholar]
- Zhou, C.; Gu, Y.; Fan, X.; Shi, Z.; Mao, G.; Zhang, Y.D. Direction-of-arrival estimation for coprime array via virtual array interpolation. IEEE Trans. Signal Process. 2018, 66, 5956–5971. [Google Scholar] [CrossRef]
- Tan, Z.; Eldar, Y.C.; Nehorai, A. Direction of arrival estimation using co-prime arrays: A super reso-lution viewpoint. IEEE Trans. Signal Process. 2014, 62, 5565–5576. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Jiang, D.F.; Zhang, X. DOA estimation based on combined unitary ESPRIT for coprime MIMO radar. IEEE Commun. Lett. 2016, 21, 96–99. [Google Scholar] [CrossRef]
- Zhou, C.; Shi, Z.; Gu, Y.; Shen, X. DECOM: DOA Estimation with Combined MUSIC for Coprime Array. In Proceedings of the 2013 International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 24–26 October 2013; pp. 1–5. [Google Scholar]
- Sun, F.; Gao, B.; Chen, L.; Lan, P. A low-complexity ESPRIT-based DOA estimation method for co-prime linear arrays. Sensors 2016, 16, 1367. [Google Scholar] [CrossRef] [Green Version]
- Sun, F.; Gao, B.; Lan, P. Partial spectral search-based DOA estimation method for co-prime linear arrays. Electron. Lett. 2015, 51, 2053–2055. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Coprime sampling and the MUSIC algorithm. In Proceedings of the 2011 Digital Signal Processing and Signal Processing Education Meeting (DSP/SPE), Sedona, AZ, USA, 4–7 January 2011; pp. 289–294. [Google Scholar]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A.; Qu, F. Source estimation using coprime array: A sparse reconstruction perspective. IEEE Sens. J. 2016, 17, 755–765. [Google Scholar] [CrossRef]
- Zhou, C.; Zhou, J. Direction-of-Arrival Estimation with Coarray ESPRIT for Coprime Array. Sensors 2017, 17, 1779. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Z.; Zhao, Y.; Li, H.; Shui, P. Two-dimensional DOA estimation algorithm with co-prime array via sparse representation. Electron. Lett. 2015, 51, 2084–2086. [Google Scholar] [CrossRef]
- Friedlander, B.; Weiss, A.J. Direction finding in the presence of mutual coupling. IEEE Trans. Antennas Propag. 1991, 39, 277–284. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X. Direction of Arrival Estimation of Quasi-Stationary Signals Using Unfolded Coprime Array. IEEE Access 2017, 5, 6538–6545. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.; Amin, M. Generalized coprime array configurations for direction-of-arrival estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar] [CrossRef]
- Zheng, W.; Zhang, X.; Wang, Y.; Zhou, M.; Wu, Q. Extended Coprime Array Configuration Generating Large-Scale Antenna Co-Array in Massive MIMO System. IEEE Trans. Veh. Technol. 2019, 68, 7841–7853. [Google Scholar] [CrossRef]
- Raza, A.; Liu, W.; Shen, Q. Thinned Coprime Array for Second-Order Difference Co-Array Generation with Reduced Mutual Coupling. IEEE Trans. Signal Process. 2019, 67, 2052–2065. [Google Scholar] [CrossRef] [Green Version]
- Ye, Z.; Dai, J.; Xu, X. DOA estimation for uniform linear array with mutual coupling. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 280–288. [Google Scholar]
- Zhang, Y.; Liu, C.; Xu, X.; Ye, Z. Direction of arrival estimation in the presence of array perturbations. In Proceedings of the 2010 IEEE International Conference on Education Technology & Computer, Shanghai, China, 22–24 June 2010; pp. 12–16. [Google Scholar]
- Wang, X.; Meng, D.; Huang, M.; Wan, L. Reweighted regularized sparse recovery for DOA estimation with unknown mutual coupling. IEEE Commun. Lett. 2019, 23, 290–293. [Google Scholar] [CrossRef]
- Liao, B.; Zhang, Z.; Chan, S. DOA estimation and tracking of ULAs with mutual coupling. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 891–905. [Google Scholar] [CrossRef] [Green Version]
- Lin, M.; Yang, L. Blind calibration and DOA estimation with uniform circular arrays in the presence of mutual coupling. IEEE Antennas Wirel. Propag. Lett. 2006, 5, 315–318. [Google Scholar] [CrossRef]
- Qi, C.; Wang, Y.; Zhang, Y.; Chen, H. DOA estimation and self-calibration algorithm for uniform circular array. Electron. Lett. 2005, 41, 1092–1094. [Google Scholar] [CrossRef]
- See, C.M.S. Sensor array calibration in the presence of mutual coupling and unknown sensor gains and phases. Electron. Lett. 1994, 30, 373–374. [Google Scholar] [CrossRef]
- Dai, J.; Zhao, D.; Ye, Z. DOA estimation and self-calibration algorithm for nonuniform linear array. In Proceedings of the 2010 IEEE International Symposium on Intelligent Signal Processing and Communication Systems, Chengdu, China, 6–8 December 2010; pp. 1–4. [Google Scholar]
- BouDaher, E.; Ahmad, F.; Amin, M.G.; Ahmad, H. Mutual coupling effect and compensation in non-uniform arrays for direction-of-arrival estimation. Digit. Signal Process. 2017, 61, 3–14. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.L.; Vaidyanathan, P.P. Super Nested Arrays: Linear Sparse Arrays with Reduced Mutual Coupling—Part I: Fundamentals. IEEE Trans. Signal Process. 2016, 64, 3997–4012. [Google Scholar] [CrossRef]
- Svantesson, T. Modeling and estimation of mutual coupling in a uniform linear array of dipoles. In Proceedings of the 1999 IEEE International Conference on Acoustics, Speech, and Signal Processing, Phoenix, AZ, USA, 15–19 March 1999; pp. 2961–2964. [Google Scholar]
- Shi, J.; Hu, G.; Zhang, X.; Zhou, H. Generalized nested array: Optimization for degrees of freedom and mutual coupling. IEEE Commun. Lett. 2018, 22, 1208–1211. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P. Hourglass arrays and other novel 2-D sparse arrays with reduced mutual coupling. IEEE Trans. Signal Process. 2017, 65, 3369–3383. [Google Scholar] [CrossRef]
- Henault, S.; Antar, Y. Unifying the Theory of Mutual Coupling Compensation in Antenna Arrays. IEEE Antennas Propag. Mag. 2015, 57, 104–122. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, S.; Li, Q. A review of mutual coupling in MIMO systems. IEEE Access 2018, 6, 24706–24719. [Google Scholar] [CrossRef]
- Lee, J.Y.; Kim, S.H.; Jang, J.H. Reduction of Mutual Coupling in Planar Multiple Antenna by Using 1D EBG and SRR Structures. IEEE Trans. Antennas Propag. 2015, 63, 4194–4198. [Google Scholar] [CrossRef]
- Zhang, D.; Zhang, Y.; Zheng, G.; Zheng, G.; Feng, C.; Tang, J. Improved DOA estimation algorithm for co-prime linear arrays using root-MUSIC algorithm. Electron. Lett. 2017, 53, 1277–1279. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Procedure: Iterations for refined estimates |
| Step 1: Initialization: Initialize and . Step 2: DOA Estimation: Obtain the DOA estimates by solving the roots of polynomial , then let . Step 3: Mutual Coupling Estimation: Calculate and further obtain . Step 4: Convergence Determination: Go to step 2 until , where is a given threshold, such as . |
| Step | Computational complexity |
|---|---|
| Initial DOA Estimation | |
| Mutual Coupling Estimation | |
| Iteration Process | |
| Total |
| Scheme | Computational complexity |
|---|---|
| Proposed | |
| RARE-based calibration |
| Condition | ULA | CLA (General) | CLA (Switching-Based) |
|---|---|---|---|
| 0.6177 | 0.3530 | 0 | |
| 0.6251 | 0.3741 | 0.1156 | |
| 0.6312 | 0.2578 | 0 | |
| 0.6424 | 0.2736 | 0.0654 |
| Theoretical Value of | Mean Value of | Estimation Biases | |
|---|---|---|---|
| 0.3500 + 0.6062i | 0.3484 + 0.6081i | 0.0139 | |
| 0.3381 + 0.0906i | 0.3391 + 0.0893i | 0.0241 | |
| 0.2021 − 0.1167i | 0.2000 − 0.1206i | 0.0555 | |
| 0.0453 − 0.1690i | 0.0529 − 0.1640i | 0.0805 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, J.; He, Y.; Li, J. An Array Switching Strategy for Direction of Arrival Estimation with Coprime Linear Array in the Presence of Mutual Coupling. Sensors 2020, 20, 1629. https://doi.org/10.3390/s20061629
Shen J, He Y, Li J. An Array Switching Strategy for Direction of Arrival Estimation with Coprime Linear Array in the Presence of Mutual Coupling. Sensors. 2020; 20(6):1629. https://doi.org/10.3390/s20061629
Chicago/Turabian StyleShen, Jinqing, Yi He, and Jianfeng Li. 2020. "An Array Switching Strategy for Direction of Arrival Estimation with Coprime Linear Array in the Presence of Mutual Coupling" Sensors 20, no. 6: 1629. https://doi.org/10.3390/s20061629
APA StyleShen, J., He, Y., & Li, J. (2020). An Array Switching Strategy for Direction of Arrival Estimation with Coprime Linear Array in the Presence of Mutual Coupling. Sensors, 20(6), 1629. https://doi.org/10.3390/s20061629