Wavelength-Resolution SAR Ground Scene Prediction Based on Image Stack

 ,
,  , ,
, ,  , ,
, ,
Abstract
:1. Introduction
2. Change Detection Method
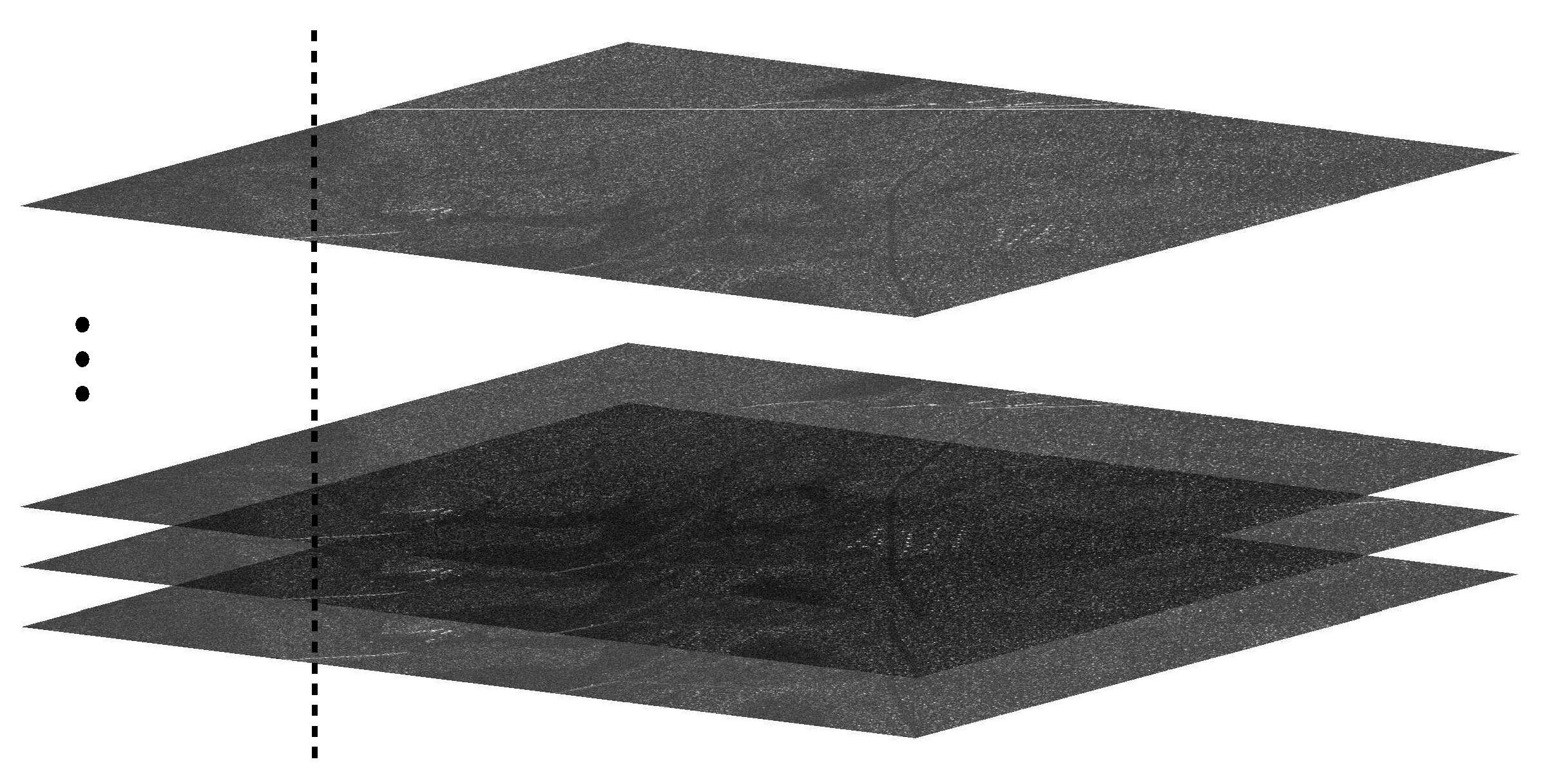
2.1. Ground Scene Prediction
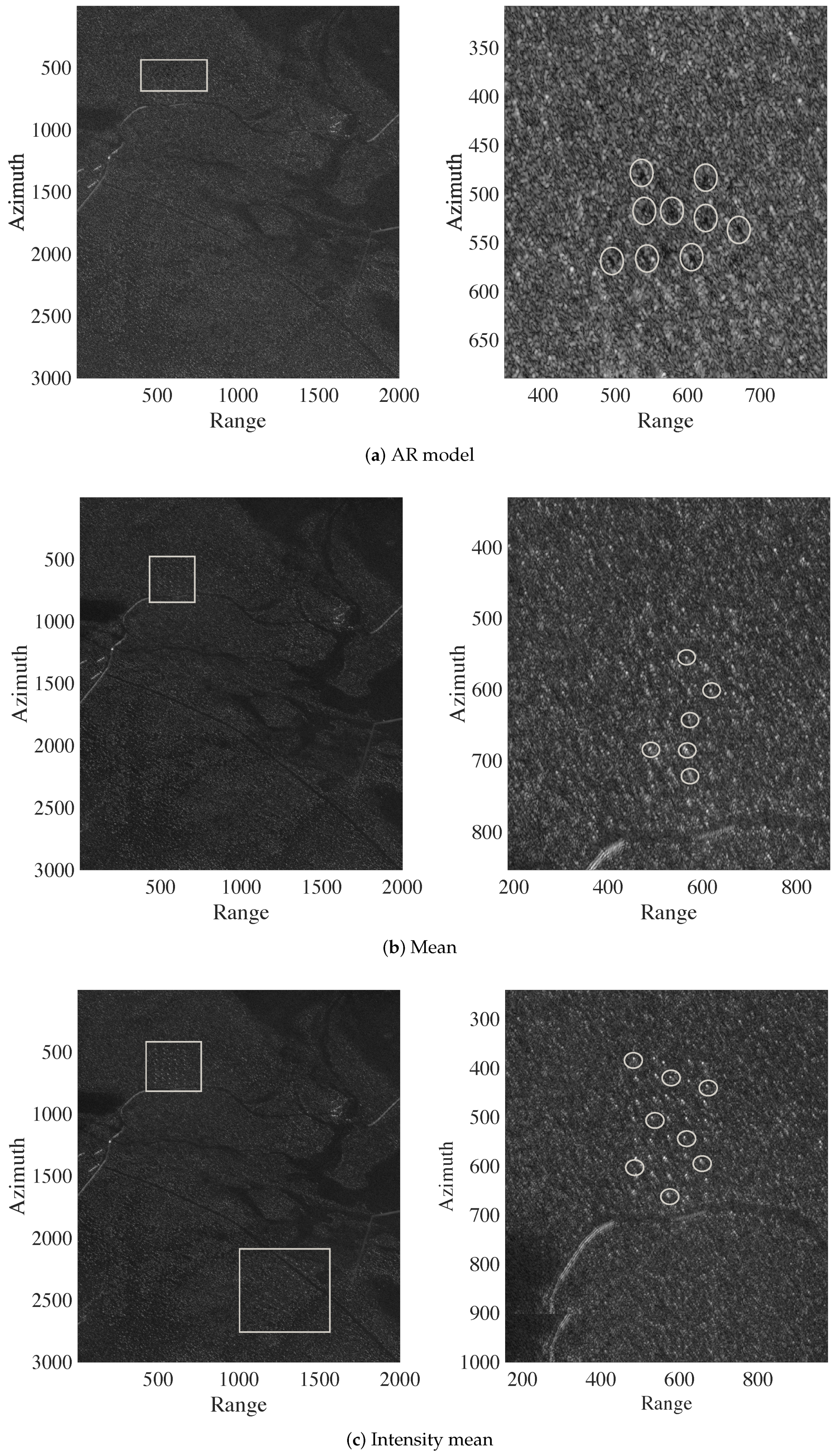
2.2. AR Model
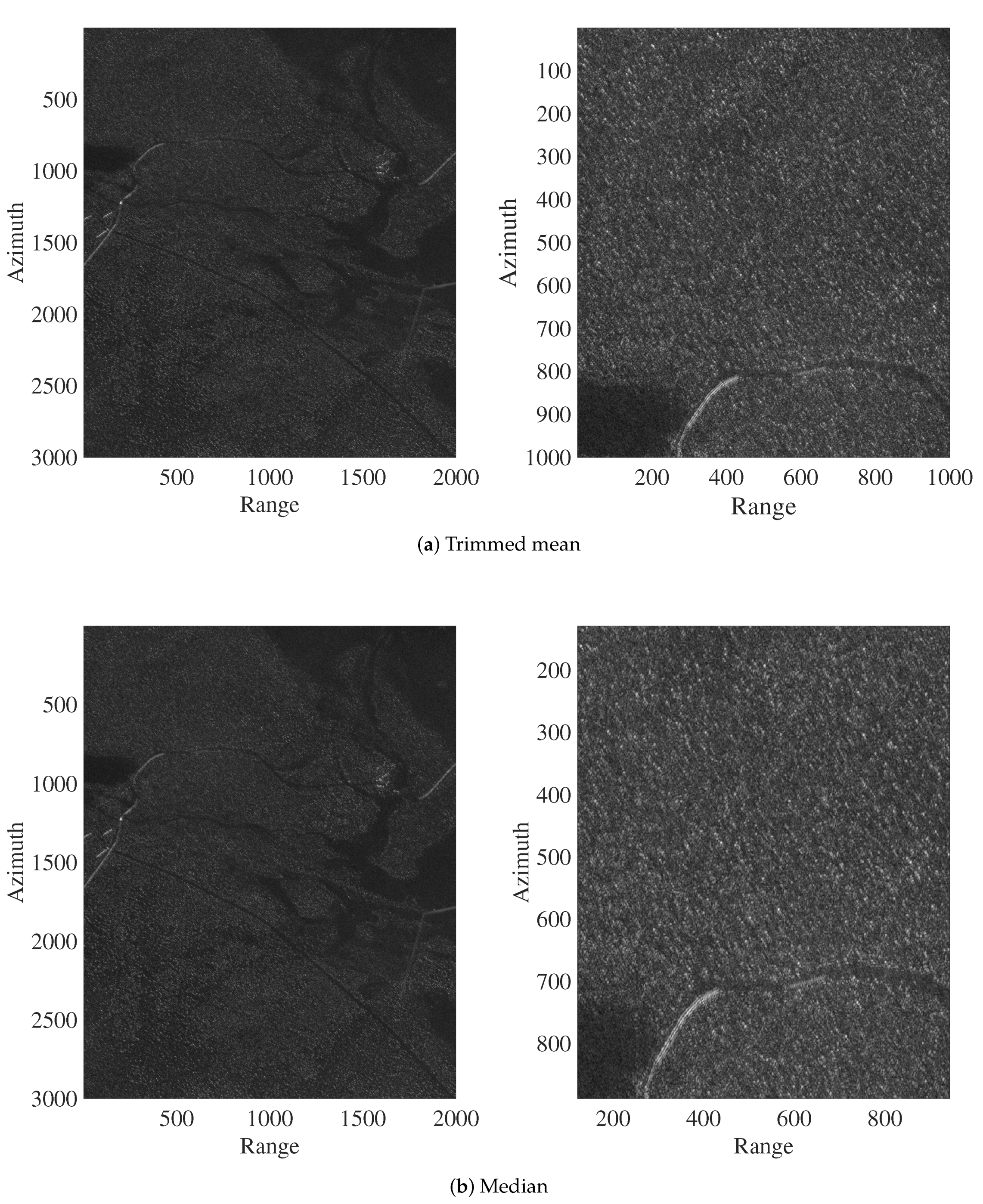
2.3. Trimmed Mean, Median, and Mean
2.4. Intensity Mean
3. Experimental Results
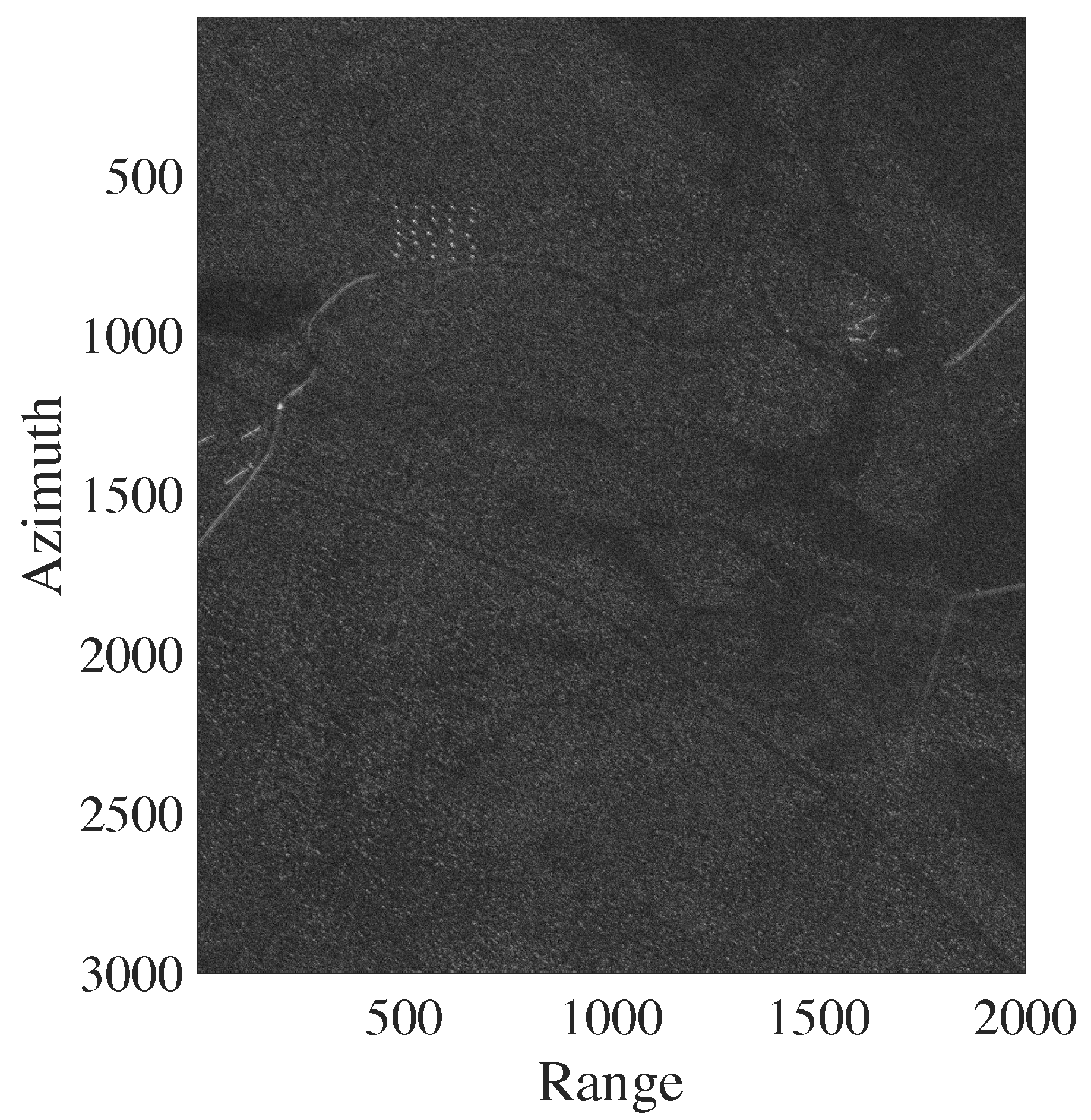
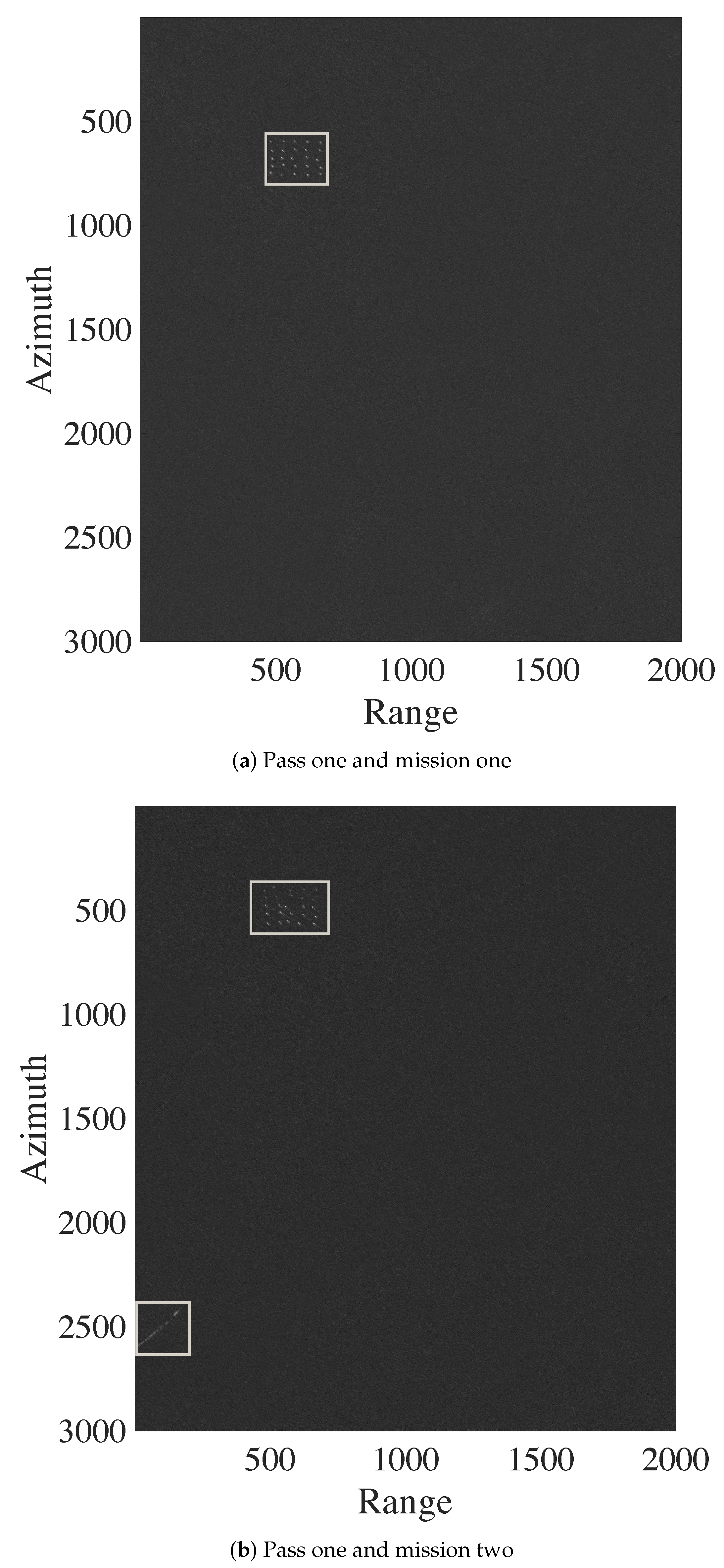
3.1. Data Description
3.2. Ground Scene Prediction Evaluation
3.3. Change Detection Results
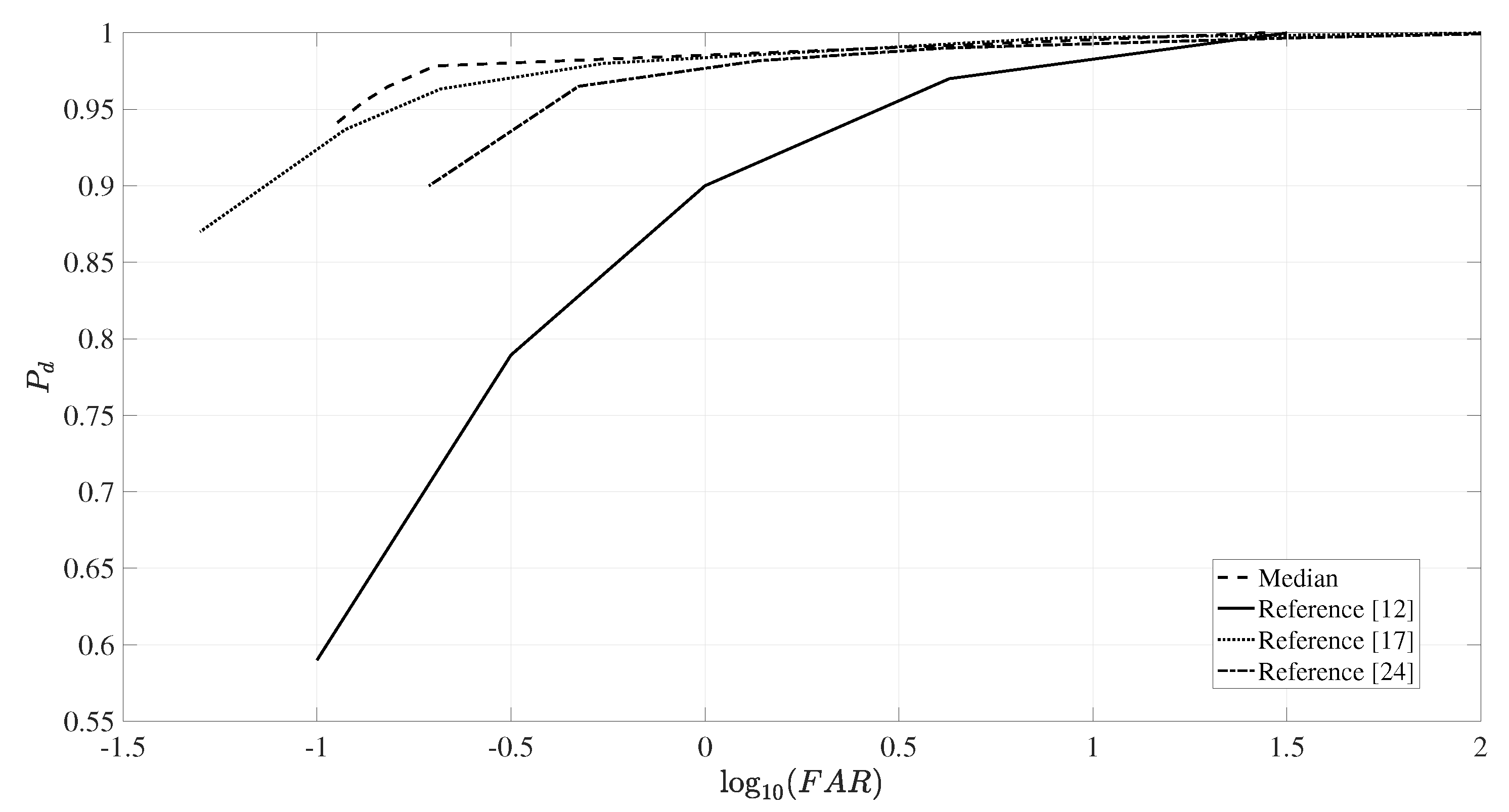
3.4. Evaluation
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hoekman, D.H.; Quiriones, M.J. Land cover type and biomass classification using AirSAR data for evaluation of monitoring scenarios in the Colombian Amazon. IEEE Trans. Geosci. Remote Sens. 2000, 38, 685–696. [Google Scholar] [CrossRef]
- Tison, C.; Nicolas, J.M.; Tupin, F.; Maître, H. A new statistical model for Markovian classification of urban areas in high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2046–2057. [Google Scholar] [CrossRef]
- Cintra, R.J.; Frery, A.C.; Nascimento, A.D. Parametric and nonparametric tests for speckled imagery. Pattern Anal. Appl. 2013, 16, 141–161. [Google Scholar] [CrossRef] [Green Version]
- Inglada, J.; Mercier, G. A new statistical similarity measure for change detection in multitemporal SAR images and its extension to multiscale change analysis. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1432–1445. [Google Scholar] [CrossRef] [Green Version]
- Palm, B.G.; Bayer, F.M.; Cintra, R.J.; Pettersson, M.I.; Machado, R. Rayleigh Regression Model for Ground Type Detection in SAR Imagery. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1660–1664. [Google Scholar] [CrossRef] [Green Version]
- Sportouche, H.; Nicolas, J.M.; Tupin, F. Mimic capacity of Fisher and generalized Gamma distributions for high-resolution SAR image statistical modeling. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5695–5711. [Google Scholar] [CrossRef]
- Eltoft, T.; Hogda, K.A. Non-Gaussian signal statistics in ocean SAR imagery. IEEE Trans. Geosci. Remote Sens. 1998, 36, 562–575. [Google Scholar] [CrossRef]
- Amirmazlaghani, M.; Amindavar, H.; Moghaddamjoo, A. Speckle suppression in SAR images using the 2-D GARCH model. IEEE Trans. Image Process. 2009, 18, 250–259. [Google Scholar] [CrossRef]
- Belcher, D.P.; Cannon, P.S. Ionospheric effects on synthetic aperture radar (SAR) clutter statistics. IET Radar Sonar Navig. 2013, 7, 1004–1011. [Google Scholar] [CrossRef]
- Gudnason, J.; Cui, J.; Brookes, M. HRR automatic target recognition from superresolution scattering center features. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1512–1524. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, X.; Hou, B.; Liu, G. Using Combined Difference Image and k-Means Clustering for SAR Image Change Detection. IEEE Geosci. Remote Sens. Lett. 2014, 11, 691–695. [Google Scholar] [CrossRef]
- Ulander, L.M.; Lundberg, M.; Pierson, W.; Gustavsson, A. Change detection for low-frequency SAR ground surveillance. IEEE Proc. Radar Sonar Navig. 2005, 152, 413–420. [Google Scholar] [CrossRef]
- Mercier, G.; Moser, G.; Serpico, S.B. Conditional copulas for change detection in heterogeneous remote sensing images. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1428–1441. [Google Scholar] [CrossRef]
- Ulander, L.M.; Pierson, W.E.; Lundberg, M.; Follo, P.; Frolind, P.O.; Gustavsson, A. Performance of VHF-band SAR change detection for wide-area surveillance of concealed ground targets. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XI, International Society for Optics and Photonics, Orlando, FL, USA, 2 September 2004; Volume 5427, pp. 259–271. [Google Scholar]
- Hellsten, H.; Ulander, L.M.; Gustavsson, A.; Larsson, B. Development of VHF CARABAS II SAR. Radar Sens. Technol. 1996, 2747, 48–61. [Google Scholar]
- Machado, R.; Vu, V.T.; Pettersson, M.I.; Dammert, P.; Hellsten, H. The stability of UWB low-frequency SAR images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1114–1118. [Google Scholar] [CrossRef]
- Vu, V.T. Wavelength-resolution SAR incoherent change detection based on image stack. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1012–1016. [Google Scholar] [CrossRef] [Green Version]
- Alves, D.I.; Palm, B.G.; Pettersson, M.I.; Vu, V.T.; Machado, R.; Uchoa-Filho, B.F.; Dammert, P.; Hellsten, H. A Statistical Analysis for Wavelength-Resolution SAR Image Stacks. IEEE Geosci. Remote Sens. Lett. 2019, 17, 227–231. [Google Scholar] [CrossRef]
- Baselice, F.; Ferraioli, G.; Pascazio, V. Markovian change detection of urban areas using very high resolution complex SAR images. IEEE Geosci. Remote Sens. Lett. 2013, 11, 995–999. [Google Scholar] [CrossRef]
- Montazeri, S.; Zhu, X.X.; Eineder, M.; Bamler, R. Three-dimensional deformation monitoring of urban infrastructure by tomographic SAR using multitrack TerraSAR-X data stacks. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6868–6878. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, X.X.; Bamler, R. An efficient tomographic inversion approach for urban mapping using meter resolution SAR image stacks. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1250–1254. [Google Scholar] [CrossRef] [Green Version]
- White, R.G. Change detection in SAR imagery. Int. J. Remote Sens. 1991, 12, 339–360. [Google Scholar] [CrossRef]
- Ulander, L.; Frolind, P.O.; Gustavsson, A.; Hellsten, H.; Jonsson, T.; Larsson, B.; Stenstrom, G. Performance of the CARABAS-II VHF-band synthetic aperture radar. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS’01), Sydney, NSW, Australia, 9–13 July 2001; Volume 1, pp. 129–131. [Google Scholar]
- Vu, V.T.; Gomes, N.R.; Pettersson, M.I.; Dammert, P.; Hellsten, H. Bivariate Gamma Distribution for Wavelength-Resolution SAR Change Detection. IEEE Trans. Geosci. Remote Sens. 2018, 57, 473–481. [Google Scholar] [CrossRef]
- Palm, B.G.; Alves, D.I.; Vu, V.T.; Pettersson, M.I.; Bayer, F.M.; Cintra, R.J.; Machado, R.; Dammert, P.; Hellsten, H. Autoregressive model for multi-pass SAR change detection based on image stacks. In Proceedings of the Image and Signal Processing for Remote Sensing XXIV, International Society for Optics and Photonics, Berlin, Germany, 10–12 September 2018; Volume 10789. [Google Scholar]
- Lundberg, M.; Ulander, L.M.; Pierson, W.E.; Gustavsson, A. A challenge problem for detection of targets in foliage. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XIII, Orlando, FL, USA, 17–21 May 2006; Volume 6237. [Google Scholar]
- Vu, V.T.; Pettersson, M.I.; Machado, R.; Dammert, P.; Hellsten, H. False alarm reduction in wavelength-resolution SAR change detection using adaptive noise canceler. IEEE Trans. Geosci. Remote Sens. 2017, 55, 591–599. [Google Scholar] [CrossRef]
- Ghirmai, T. Representing a cascade of complex Gaussian AR models by a single Laplace AR model. IEEE Signal Process. Lett. 2015, 22, 110–114. [Google Scholar] [CrossRef]
- Liu, B.; Reju, V.G.; Khong, A.W. A linear source recovery method for underdetermined mixtures of uncorrelated AR-model signals without sparseness. IEEE Trans. Signal Process. 2014, 62, 4947–4958. [Google Scholar] [CrossRef]
- Biscainho, L.W. AR model estimation from quantized signals. IEEE Signal Process. Lett. 2004, 11, 183–185. [Google Scholar] [CrossRef]
- Milenkovic, P. Glottal inverse filtering by joint estimation of an AR system with a linear input model. IEEE Trans. Acoust. Speech Signal Process. 1986, 34, 28–42. [Google Scholar] [CrossRef]
- Maronna, R.A.; Martin, R.D.; Yohai, V.J.; Salibián-Barrera, M. Robust Statistics: Theory and Methods (with R); Wiley: Hoboken, NJ, USA, 2018. [Google Scholar]
- Hampel, F.R.; Ronchetti, E.M.; Rousseeuw, P.J.; Stahel, W.A. Robust statistics: The Approach Based on Influence Functions; Wiley Online Library: Hoboken, NJ, USA, 2011. [Google Scholar]
- Bustos, O.; Ojeda, S.; Vallejos, R. Spatial ARMA models and its applications to image filtering. Braz. J. Probab. Stat. 2009, 23, 141–165. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, D. Progressive switching median filter for the removal of impulse noise from highly corrupted images. IEEE Trans. Circuits Syst. II Analog Digit. Signal Process. 1999, 46, 78–80. [Google Scholar] [CrossRef] [Green Version]
- Kirchner, M.; Fridrich, J. On detection of median filtering in digital images. In Proceedings of the Media Forensics and Security II. International Society for Optics and Photonics, San Jose, CA, USA, 18–20 January 2010; Volume 7541, p. 754110. [Google Scholar]
- Chen, C.; Ni, J.; Huang, J. Blind detection of median filtering in digital images: A difference domain based approach. IEEE Trans. Image Process. 2013, 22, 4699–4710. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, S.; Wang, S.; Shi, Y.Q. Revealing the traces of median filtering using high-order local ternary patterns. IEEE Signal Process. Lett. 2014, 21, 275–279. [Google Scholar] [CrossRef]
- Chen, J.; Kang, X.; Liu, Y.; Wang, Z.J. Median filtering forensics based on convolutional neural networks. IEEE Signal Process. Lett. 2015, 22, 1849–1853. [Google Scholar] [CrossRef]
- Oten, R.; de Figueiredo, R.J. Adaptive alpha-trimmed mean filters under deviations from assumed noise model. IEEE Trans. Image Process. 2004, 13, 627–639. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, F.; Das, S. Removal of high-density salt-and-pepper noise in images with an iterative adaptive fuzzy filter using alpha-trimmed mean. IEEE Trans. Fuzzy Syst. 2013, 22, 1352–1358. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R. Digital Image Processing; Prentice Hall: Upper Saddle River, NJ, USA, 2008. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Detection Theory; Prentice Hall: Upper Saddle River, NJ, USA, 1998; Volume II. [Google Scholar]
- Brockwell, P.J.; Davis, R.A. Introduction to Time Series and Forecasting; Springer: Berlin, Germany, 2016. [Google Scholar]
- Brockwell, P.J.; Davis, R.A. Time Series: Theory and Methods; Springer: Berlin, Germany, 2013. [Google Scholar]
- SDMS. Sensor Data Management System Public Web Site. 2018. Available online: https://www.sdms.afrl.af.mil/index.php (accessed on 28 February 2020).
- Hyndman, R.J.; Koehler, A.B. Another look at measures of forecast accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef] [Green Version]
- Metz, C.E. Basic principles of ROC analysis. In Seminars in Nuclear Medicine; Elsevier: Amsterdam, The Netherlands, 1978; Volume 8, pp. 283–298. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average | Standard Deviation | Skewness | Kurtosis | |
|---|---|---|---|---|
| Stack 1 | ||||
| Interest image | ||||
| AR model | ||||
| Trimmed mean | ||||
| Median | ||||
| Mean | ||||
| Intensity mean | ||||
| Stack 2 | ||||
| Interest image | ||||
| AR model | ||||
| Trimmed mean | ||||
| Median | ||||
| Mean | ||||
| Intensity mean | ||||
| Stack 3 | ||||
| Interest image | ||||
| AR model | ||||
| Trimmed mean | ||||
| Median | ||||
| Mean | ||||
| Intensity mean | ||||
| MSE | MAPE | MdAE | ||
|---|---|---|---|---|
| Stack 1 | AR model | |||
| Trimmed mean | ||||
| Median | ||||
| Mean | ||||
| Intensity mean | ||||
| Stack 2 | AR model | |||
| Trimmed mean | ||||
| Median | ||||
| Mean | ||||
| Intensity mean | ||||
| Stack 3 | AR model | |||
| Trimmed mean | ||||
| Median | ||||
| Mean | ||||
| Intensity mean |
| Case of Interest | Number of | Detected | Number of | ||
|---|---|---|---|---|---|
| Mission | Pass | Known Targets | Targets | False Alarms | |
| 1 | 1 | 25 | 25 | 0 | |
| 2 | 1 | 25 | 25 | 3 | |
| 3 | 1 | 25 | 25 | 0 | |
| 4 | 1 | 25 | 23 | 2 | |
| 1 | 2 | 25 | 25 | 0 | |
| 2 | 2 | 25 | 25 | 1 | |
| 3 | 2 | 25 | 25 | 2 | |
| 4 | 2 | 25 | 23 | 1 | |
| 1 | 3 | 25 | 25 | 2 | |
| 2 | 3 | 25 | 23 | 0 | |
| 3 | 3 | 25 | 25 | 3 | |
| 4 | 3 | 25 | 23 | 0 | |
| 1 | 4 | 25 | 25 | 0 | |
| 2 | 4 | 25 | 25 | 0 | |
| 3 | 4 | 25 | 25 | 1 | |
| 4 | 4 | 25 | 23 | 0 | |
| 1 | 5 | 25 | 25 | 0 | |
| 2 | 5 | 25 | 15 | 6 | |
| 3 | 5 | 25 | 25 | 0 | |
| 4 | 5 | 25 | 24 | 0 | |
| 1 | 6 | 25 | 25 | 0 | |
| 2 | 6 | 25 | 25 | 1 | |
| 3 | 6 | 25 | 25 | 0 | |
| 4 | 6 | 25 | 25 | 0 | |
| Total | 600 | 579 | 22 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palm, B.G.; Alves, D.I.; Pettersson, M.I.; Vu, V.T.; Machado, R.; Cintra, R.J.; Bayer, F.M.; Dammert, P.; Hellsten, H. Wavelength-Resolution SAR Ground Scene Prediction Based on Image Stack. Sensors 2020, 20, 2008. https://doi.org/10.3390/s20072008
Palm BG, Alves DI, Pettersson MI, Vu VT, Machado R, Cintra RJ, Bayer FM, Dammert P, Hellsten H. Wavelength-Resolution SAR Ground Scene Prediction Based on Image Stack. Sensors. 2020; 20(7):2008. https://doi.org/10.3390/s20072008
Chicago/Turabian StylePalm, Bruna G., Dimas I. Alves, Mats I. Pettersson, Viet T. Vu, Renato Machado, Renato J. Cintra, Fábio M. Bayer, Patrik Dammert, and Hans Hellsten. 2020. "Wavelength-Resolution SAR Ground Scene Prediction Based on Image Stack" Sensors 20, no. 7: 2008. https://doi.org/10.3390/s20072008
APA StylePalm, B. G., Alves, D. I., Pettersson, M. I., Vu, V. T., Machado, R., Cintra, R. J., Bayer, F. M., Dammert, P., & Hellsten, H. (2020). Wavelength-Resolution SAR Ground Scene Prediction Based on Image Stack. Sensors, 20(7), 2008. https://doi.org/10.3390/s20072008